無人機(jī)傾斜攝影在黃山三維建模中的應(yīng)用
2019-12-25 13:20:02沈天賀高飛張遷
安徽建筑 2019年11期
沈天賀,高飛,張遷
(1.合肥工業(yè)大學(xué),安徽 合肥 230009;2.安徽省第一測(cè)繪院,安徽 合肥 230000.)
近幾年,無人機(jī)傾斜攝影技術(shù)成為國(guó)內(nèi)外測(cè)量技術(shù)的重要方法,同時(shí)也成為眾多學(xué)者研究一大熱點(diǎn)。它突破了傳統(tǒng)的垂直拍攝獲取影像的制約,實(shí)現(xiàn)了從多個(gè)角度拍攝,傳感器可快速、高效率、大視場(chǎng)獲取同一地物豐富的表面信息。在多個(gè)領(lǐng)域內(nèi)無人機(jī)傾斜攝影技術(shù)得到了充分的應(yīng)用,例如在大比例尺地形圖的測(cè)繪和三維建模中得到了應(yīng)用。傾斜攝影在三維建模中應(yīng)用的越來越多。在傳統(tǒng)三維建模中應(yīng)用的是3DMAX技術(shù),其精度低、紋理是通過人工粘貼制作,造成紋理失真,無法滿足生產(chǎn)需求。并且無法進(jìn)行進(jìn)行單體化管理與精細(xì)化處理,造成數(shù)據(jù)處理量大,效率低。
1 國(guó)內(nèi)外研究現(xiàn)狀
傳統(tǒng)航空攝影受限于天氣原因、較大成本投資等問題。無人機(jī)最早被發(fā)明于1917年,當(dāng)時(shí)的發(fā)明是為了應(yīng)用于軍事,但是隨著后來數(shù)字技術(shù)發(fā)展的越來越快,各種精度高、體積小的傳感器被研發(fā)出來,無人機(jī)技術(shù)也愈發(fā)的成熟起來,無人機(jī)測(cè)量技術(shù)也被應(yīng)用的廣泛起來[1]。
近幾年國(guó)內(nèi)無人機(jī)發(fā)展也愈發(fā)迅速,除了生產(chǎn)軍用無人機(jī)的大公司外,從事民用的飛機(jī)也逐漸多起來。市面上出現(xiàn)了多種多樣的無人機(jī)。
1.1 傾斜攝影測(cè)量技術(shù)概述
在進(jìn)行三維模型建設(shè)過程中,航空攝影測(cè)量方式通常是使用數(shù)據(jù)建模的方式實(shí)現(xiàn)。但航空攝影測(cè)量時(shí)由于飛行角度和路線的影響,在拍攝過程中會(huì)存在漏拍和影響缺失現(xiàn)象,所以在進(jìn)行航拍過后,需要對(duì)特殊地物進(jìn)行二次補(bǔ)拍,從而獲得更加全面的地物信息。但是傾斜攝影數(shù)據(jù)測(cè)量恰巧可以解決上述問題,它能夠在測(cè)量城市建模的基礎(chǔ)上,通過垂直和傾斜五個(gè)不同的拍攝角度,全方位真實(shí)的反饋地物的具體情況,有效的降低城市拍攝的成本,深深影響影像的精度。
建模軟件在行業(yè)里有三款比較常用,有Bently公司的 ContextCapture(Smart3D),俄羅斯 Agisoft公司的PhotoScan,瑞士Pix4D公司Pix4Dmapper[2]。具體對(duì)比如下表所示。
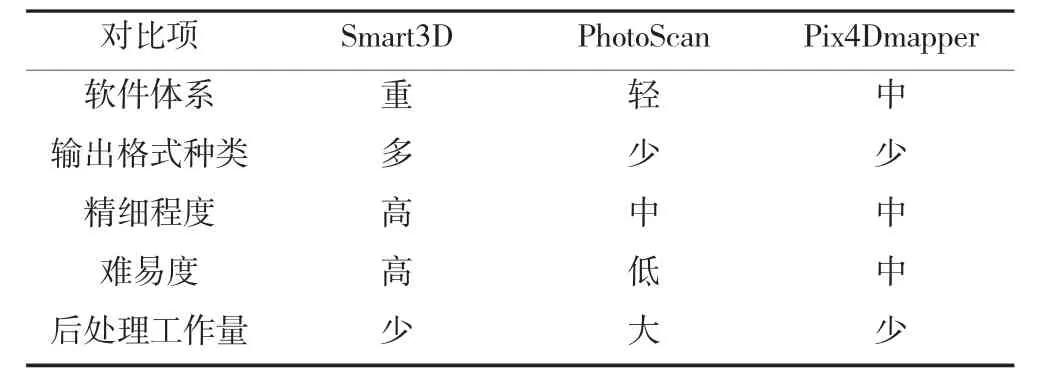
多種軟件對(duì)比
2 無人機(jī)傾斜攝影測(cè)量原理
傾斜攝影測(cè)量是通過在無人機(jī)上搭載多臺(tái)傳感器,現(xiàn)階段為五個(gè)鏡頭相機(jī),同時(shí)從垂直、傾斜的四個(gè)不同方向采集影像,從而獲得大面物體的完整精準(zhǔn)的信息[3]。從垂直角度拍攝的影像為正片,鏡頭與垂直地面形成一定角度拍攝的四組影像被稱之為斜片。拍攝范圍如圖1。

圖1 航拍示意圖
攝影測(cè)量淵源于測(cè)繪學(xué)科,基于非線性迭代的最小二乘法平差求解貫穿于數(shù)字近景攝影測(cè)量的全過程,其中共線方程是表達(dá)物點(diǎn)、像點(diǎn)和投影中心(對(duì)像片而言通常是鏡頭中心)三點(diǎn)位于一條直線的數(shù)學(xué)關(guān)系式,是攝影測(cè)量學(xué)中最基本的公式之一[4]。
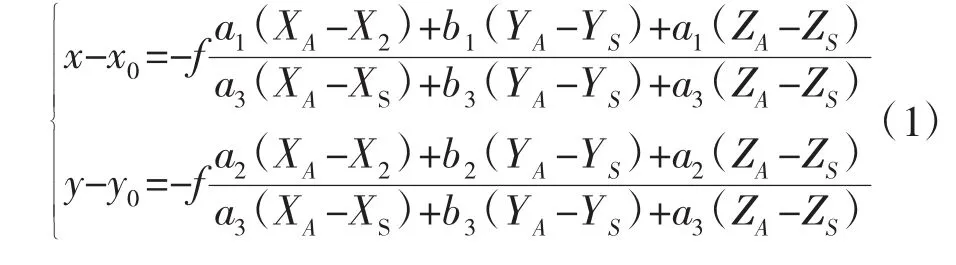
為了解算出被攝物體在空間中的位置,通常就是采用共線方程進(jìn)行解算[5]。其中x,y為所獲取像點(diǎn)的像平面坐標(biāo);x0,y0,f為所獲取影像的內(nèi)方位元素;XS,YS,ZS為攝站點(diǎn)的物方空間坐標(biāo);XA,YA,ZA為物方點(diǎn)的物方[6]。
3 黃山市某地區(qū)建筑物三維模型構(gòu)建
本次三維模型構(gòu)建選擇黃山市某地區(qū),該區(qū)域內(nèi)地貌類型多種多樣,以中、低山地和丘陵為主。山體海拔高度一般在400~500m,千米以上高峰眾多[8]。測(cè)區(qū)內(nèi)居民地比較集中,基本為街區(qū)式、徽派建筑,郊區(qū)農(nóng)村居民多為散列式房屋[9]。
3.1 外業(yè)航飛數(shù)據(jù)獲取
根據(jù)項(xiàng)目要求,本次航攝任務(wù)下視影像地面分辨率為0.05m,在航高要求上無30層以上高層情況航高 100~180m,有 30層及以上高層情況航高150~200m,所有分區(qū)需要重疊。傾斜攝影設(shè)計(jì)時(shí)以下視重疊度為準(zhǔn),航向和旁向重疊度設(shè)置為70%,通常情況下航線按東西或者南北向直線飛行,在特殊條件下可以按照設(shè)計(jì)一定的飛行路線進(jìn)行飛行。并且應(yīng)在有效建模范圍外進(jìn)行飛行航線外擴(kuò),外擴(kuò)航線不應(yīng)少于3條航線或3條基線,在特殊的地物上應(yīng)增加重疊度,例如高層建筑物密集區(qū)或者不易拍攝地區(qū)[7]。
3.2 像片控制測(cè)量
在此次項(xiàng)目中像控點(diǎn)及精度檢查點(diǎn)的施測(cè)優(yōu)先采用動(dòng)態(tài)網(wǎng)絡(luò)RTK的方法。也可以采用AHCORS系統(tǒng),采用RTK測(cè)量或雙頻接收機(jī)雙參考站模式按快速靜態(tài)方式施測(cè)[10]。在本項(xiàng)目上采用搭載GPS/IMU定位定姿航攝技術(shù),輔以AHCORS虛擬基站后差分技術(shù),高精度解算外方位元素,在滿足測(cè)量精度的前提下,又極大減少了外業(yè)像控點(diǎn)數(shù)量。在本次項(xiàng)目上,像控點(diǎn)的布設(shè)要求均勻布設(shè),在航飛照片上選擇清晰易判斷的固定點(diǎn),因?yàn)楸敬蝺A斜攝影像片重疊度較大,共計(jì)7個(gè)景區(qū),每個(gè)景區(qū)面積約為0.45km2,擬每平方公里布設(shè)5個(gè)像控點(diǎn)。
為了檢驗(yàn)三維模型的幾何精度,也要在成圖區(qū)域采集精度檢查點(diǎn),采集的原則是1平方公里范圍內(nèi)布設(shè)3個(gè)左右,城區(qū)建筑物密集區(qū)適當(dāng)增大檢查點(diǎn)的密度。精度檢查點(diǎn)的采集在成圖范圍內(nèi)的地面、低層建筑物、高層建筑物等不同高度、不同類型的樣本上分別采集。同時(shí)精度檢驗(yàn)的控制點(diǎn)在地面、低層平頂建筑物、低層人字頂建及高層建筑物上的分布比例應(yīng)相當(dāng)。
在控制片的制作上,根據(jù)pos數(shù)據(jù),采用像控點(diǎn)數(shù)據(jù)采集系統(tǒng),生成概略坐標(biāo)的影像。控制片的編號(hào)由控制點(diǎn)標(biāo)識(shí)(P代表控制點(diǎn),J代表檢查點(diǎn))、分區(qū)號(hào)、片號(hào)組成。例如P010001(01為分區(qū)號(hào),0001為控制點(diǎn)流水號(hào))。
3.3 實(shí)景三維建模
傾斜攝影測(cè)量是基于五個(gè)不同視角傾斜影像以及與之相應(yīng)的空三加密成果,在三維建模軟件中,通過測(cè)區(qū)分塊、像對(duì)篩選、點(diǎn)云計(jì)算、點(diǎn)云構(gòu)網(wǎng)、白體三維模型創(chuàng)建、自助紋理映射、漏洞修復(fù)以及元數(shù)據(jù)制作等操作,完成測(cè)區(qū)三維實(shí)景模型成果的生產(chǎn)。空三處理流程如圖2,其工藝流程見圖3。
圖2 空三數(shù)據(jù)成果圖
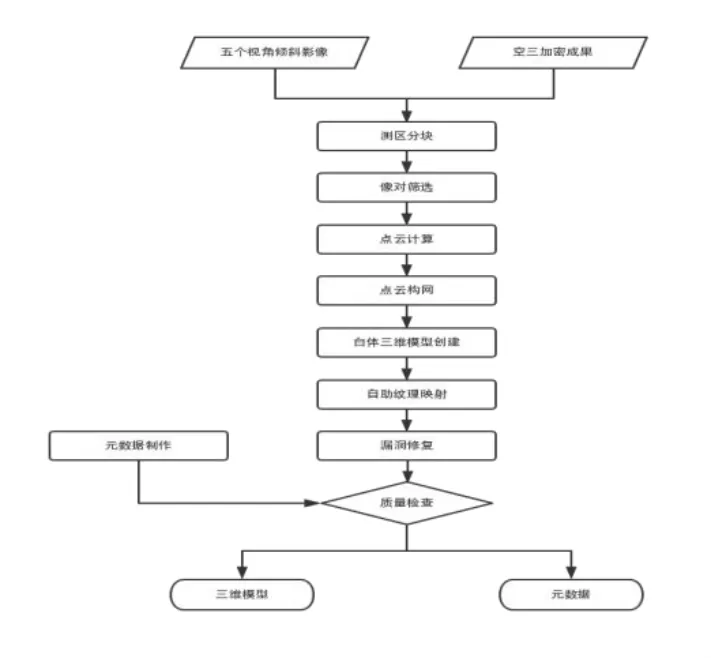
圖3 工藝流程
①測(cè)區(qū)分塊。分塊前需結(jié)合測(cè)區(qū)高程范圍設(shè)置項(xiàng)目的最大和最小高程值,作為實(shí)景三維模型生產(chǎn)在豎直方向的裁切范圍。為了提高計(jì)算效率,保證快速生成三維模型,把測(cè)區(qū)進(jìn)行合理的分塊(Tile)大小進(jìn)行劃分,這些分塊的劃分是根據(jù)影像的分辨率、影像重疊度、節(jié)點(diǎn)的內(nèi)存以及數(shù)據(jù)處理能力等。
②區(qū)域整體平差與金字塔創(chuàng)建。為了滿足生產(chǎn)所需要的影像金字塔文件,應(yīng)選擇合理的需要處理的測(cè)區(qū)分塊。之后結(jié)合考慮航飛的具體情況與各個(gè)相機(jī)的安置關(guān)系,根據(jù)兩張相片攝影中心點(diǎn)之間的位置關(guān)系建立像對(duì)關(guān)系。一張像片至少要對(duì)應(yīng)一個(gè)像對(duì),最多不能超過四個(gè)像對(duì)。滿足像對(duì)匹配成功的像片攝影中心位置最小距離應(yīng)接近并小于航向與旁向距離的最小值,最大距離應(yīng)小于航向與旁向距離最大值的2倍。在生成像對(duì)文件后,需要對(duì)像對(duì)文件內(nèi)的每個(gè)像對(duì)進(jìn)行檢查,查看像對(duì)文件是否滿足要求。
③多視角影像密集匹配與點(diǎn)云構(gòu)網(wǎng)優(yōu)化。在生成像對(duì)文件后,需要進(jìn)行影像匹配,應(yīng)把分塊(Tile)區(qū)域內(nèi)的每個(gè)像對(duì)進(jìn)行點(diǎn)云匹配,然后再所有分塊(Tile)內(nèi)的點(diǎn)云進(jìn)行合并保存在同一輸出文件夾內(nèi),生成點(diǎn)云文件。然后基于合并后的點(diǎn)云文件創(chuàng)建TIN網(wǎng)的三維模型,先將內(nèi)部三角的尺寸調(diào)整至與原始影像分辨率相匹配的比例,然后過濾突變、不連續(xù)的點(diǎn)云。最后為了使該區(qū)域內(nèi)的三角網(wǎng)密度下降,通過分析連續(xù)曲面的變化,認(rèn)為對(duì)地勢(shì)平坦范圍內(nèi)TIN網(wǎng)進(jìn)行簡(jiǎn)單化處理,可以達(dá)到效果。
④白體三維模型創(chuàng)建與自助紋理映射。在對(duì)TIN網(wǎng)進(jìn)行簡(jiǎn)單處理時(shí),發(fā)現(xiàn)不規(guī)則的三角網(wǎng)TIN,及時(shí)對(duì)其進(jìn)行處理創(chuàng)建生成白模的三角模型。之后把關(guān)聯(lián)影像信息跟處理后的結(jié)果結(jié)合在一起,使每個(gè)三角形的建立都可有與之對(duì)應(yīng)的紋理信息。同時(shí)把三維模型與紋理信息的關(guān)聯(lián)一起保存在同一文件中。色彩均衡在紋理映射時(shí)進(jìn)行,應(yīng)把紋理大小設(shè)置為影像長(zhǎng)邊的1.5倍,這是以像素為單位。建立多細(xì)節(jié)層次紋理的模型(Levels of Detail,簡(jiǎn)稱LOD),便于把相應(yīng)的文件組織結(jié)構(gòu)進(jìn)行優(yōu)化。再把得到的LOD結(jié)構(gòu)模型文件轉(zhuǎn)換為OpenSceneGraph格式,即后綴名*.osgb存儲(chǔ)。
⑤漏洞修復(fù)。對(duì)視場(chǎng)盲區(qū)及陰影造成的三維模型錯(cuò)誤,例如漏洞、樓體缺失和水體漏洞等錯(cuò)誤進(jìn)行手動(dòng)修復(fù)編輯,并重新貼附正確的紋理。進(jìn)行空三處理后,把生成3DMX影像,預(yù)覽圖如圖4(abc)。
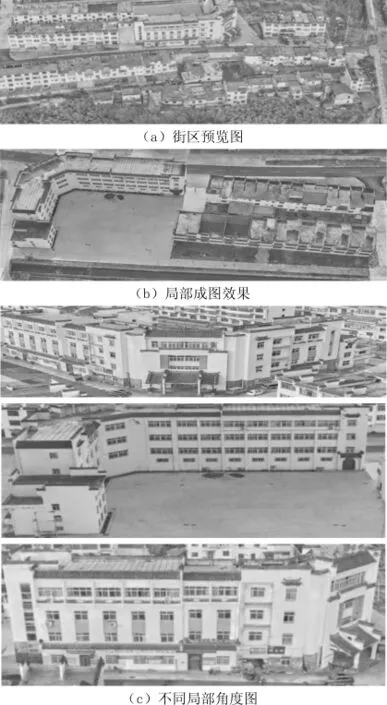
圖4
4 結(jié)論
通過在黃山項(xiàng)目中三維建模的應(yīng)用,發(fā)現(xiàn)現(xiàn)如今的傾斜攝影技術(shù)與傳統(tǒng)的測(cè)量技術(shù)有很大的不同。尤其是在地物的地理信息方面,傳統(tǒng)的三維建模存在速度慢,數(shù)據(jù)量大、地物信息缺失等缺點(diǎn),在現(xiàn)如今的傾斜攝影技術(shù)上得到了發(fā)展,例如可以更快的進(jìn)行數(shù)據(jù)化、一體化和自動(dòng)化的生成三維模型,在精度處理過程中也避免了人工疏忽和人工失誤等。但是同時(shí)也不可避免的出現(xiàn)一些其他問題,例如在無人機(jī)進(jìn)行航拍過程中按照一定的飛行路線,不可避免的造成一些無法拍攝的影像和一些建筑物死角;在拍攝水面與建筑物的玻璃鏡面時(shí),它們會(huì)反光與拉花,造成影像模糊;在數(shù)據(jù)處理過程會(huì)存在數(shù)據(jù)與影像關(guān)聯(lián)不到一起,無法繼續(xù)生成清晰影像,若繼續(xù)生成,則生成的影像模糊扭曲,無法辨別真實(shí)的地物信息,尤其是在建筑底部最為突出;在拍攝建筑物頂部時(shí)會(huì)有金屬物體也會(huì)造成反光問題,在拍攝路邊的厚度較低的路燈、指示牌、旗桿時(shí),會(huì)出現(xiàn)無法避免的缺失問題,造成與現(xiàn)實(shí)場(chǎng)景無法匹配的影響。出現(xiàn)以上問題在后期的數(shù)據(jù)處理過程中可以得到完善,可以通過人工制作與單獨(dú)拍攝粘貼進(jìn)行完善,進(jìn)行單體化處理。但是因?yàn)樾枰氖歉咔逦跋瘢援a(chǎn)生的數(shù)據(jù)量很大,數(shù)據(jù)處理較為困難。同時(shí)市面上一些好的處理軟件較為昂貴,無法得到普遍推廣使用,同時(shí)軟件也不容易上手使用,要進(jìn)行專門培訓(xùn)才能熟練使用軟件。所以傾斜攝影技術(shù)還需不斷優(yōu)化與研發(fā),使得影像數(shù)據(jù)精度得到不斷提高,影像更加清晰明了,為建設(shè)數(shù)字化城市打好良好的技術(shù)基礎(chǔ)。
猜你喜歡
童話王國(guó)·奇妙邏輯推理(2024年5期)2024-06-19 16:03:38
中學(xué)生數(shù)理化·七年級(jí)數(shù)學(xué)人教版(2020年10期)2020-11-26 08:24:50
數(shù)學(xué)物理學(xué)報(bào)(2020年2期)2020-06-02 11:29:24
中學(xué)生數(shù)理化·八年級(jí)物理人教版(2019年9期)2019-11-25 07:33:02
中學(xué)生數(shù)理化·八年級(jí)物理人教版(2019年3期)2019-04-25 06:20:54
中學(xué)生數(shù)理化·八年級(jí)物理人教版(2018年3期)2018-05-31 08:52:45
數(shù)學(xué)小靈通(1-2年級(jí))(2017年10期)2017-11-08 08:39:45
光學(xué)精密工程(2016年6期)2016-11-07 09:07:19
少兒科學(xué)周刊·兒童版(2016年1期)2016-03-14 03:52:21
核科學(xué)與工程(2015年4期)2015-09-26 11:59:03