冰沖擊載荷下螺旋槳軸系動態響應的變參數分析
2019-12-26 06:05:52王文全
船舶 2019年6期
關鍵詞:海冰
王 勇 呂 昊 王文全
(1.海軍裝備部裝備項目管理中心 北京100071;2.中國船舶及海洋工程設計研究院 上海200011)
引 言
船舶在冰區航行,漂浮的冰塊不僅會與船體發生碰撞,還會與水中工作的螺旋槳接觸產生冰載荷,相比于正常工作在敞水中時受到的水動力,巨大冰載荷不僅會對螺旋槳槳葉產生巨大的應力作用,造成槳葉的損壞,進而對推進軸系造成影響,甚至造成推進軸系的破壞。當海冰的位置、大小、速度和密度等不同的參數變化時,海冰和螺旋槳接觸的冰載荷必然不同,故而對推進軸系的影響不同。在這種情況下,研究冰參數對軸系的影響情況、發現其中的規律、從而得出相應的結論,對冰區船舶及其螺旋槳、軸系的設計十分必要。國內外學者關于冰載荷對推進軸系影響的研究有很多。耿厚才等[1]得出對于冰區加強船,常規的改變軸系直徑、調整飛輪或調頻方法難以滿足推進軸系穩態扭振應力的要求;楊紅軍等[2]證明NEWMARK法可較好地用于冰載荷下推進軸系瞬態扭轉振動分析;楊紅軍等[3]表明在冰載荷沖擊下,軸系轉速有很大的下降,當轉速降到一定程度時,扭轉振動響應達到最大值;吳帥[4]利用有限元法就冰載荷下軸系振動的固有特性進行研究,得出相位角對軸系扭振響應的影響并非很有規律性;Brown 等[5]通過進行實尺度實驗研究表明螺旋槳受到最大扭矩和推進軸系的轉矩的比例在0.99 至1.74 的范圍內;Dahler[6]研究表明,當螺旋槳受冰載荷超過一定時間后,螺旋槳和推進軸的轉矩響應會有明顯的差異;Ikonen 等[7]通過使用不同的逆模型提出了螺旋槳槳軸對螺旋槳扭矩的響應變換。DNV·GL[8](挪威船級社)、IACS[9](國際船級社)指出冰載荷產生的扭矩分量可表示為敞水水動力扭矩和海冰撞擊產生扭矩的和,并可用于冰載荷引起的機械響應變化 ; Poli? 等[10]得出的研究為選取最適合的頻率和評估工具來轉換海冰和螺旋槳載荷對推進軸系響應打下基礎。Aki 等[11]對冰載荷下推進軸系激振力動態扭矩進行實尺度模型對比研究。
國內關于冰區螺旋槳軸系的研究資料較少,用于研究軸系結構響應的冰載荷多來自國外學者的研究,這不利于國內關于冰區船舶推進軸系的研究推進;另外國外研究所用的冰載荷集中來自數值統計或者基于冰區航行國家船級社的經驗公式,這種載荷與實際情況下船舶推進軸系受到的冰載荷相比更為保守,并且冰載荷在實際情況下變化更為復雜。本文以ANSYS/LS-DYNA 與ABQUAS 為工具建立一套變冰塊幾何參數工況下,螺旋槳軸系動態響應的數值模擬方法,能較準確地獲取冰-槳接觸下的動態冰載荷及其變化趨勢,具有一定的創新性。
海冰和螺旋槳接觸碰撞的過程中,海冰的物理參數直接影響螺旋槳受到的冰載荷大小和冰載荷的變化規律,進而影響船舶推進軸系的工作,因此計算分析海冰參數對冰載荷和推進軸系的影響十分重要。本文利用ANSYS/LS-DYNA 中流固耦合法獲取海冰和螺旋槳接觸載荷,用ABQUAS隱式有限元法計算該冰載荷對軸系的動態響應,進而分析不同海冰參數(如海冰的位置、尺寸和速度)對推進軸系動態響應的影響規律,為冰區船舶推進軸系的設計、布局以及冰區航行船舶的操縱提供參考意見。
1 數值計算
1.1 理論分析
分析推進軸系在海冰-螺旋槳接觸碰撞載荷下的動態響應,其關鍵在于獲取兩者耦合作用下的載荷,而海冰-螺旋槳的接觸屬于流固耦合問題。流固耦合的關鍵難點在于處理材料的變形行為。一般材料的變形可分為兩種類型,變形過程中體積不變和變形過程中體積變化。變形中的應力張量可以分成兩部分,即應力偏量和壓力。對于任何材料,都可以用應力偏量和壓力來描述它的應力張量。在對流體材料處理的過程中,就需要同時使用兩種方式來描述材料,用本構模型和狀態方程來同時描述一種材料特性:用本構模型來描述應力偏量和壓力的關系,用狀態方程來描述體積變形和壓力之間的關系。在ANSYS/LS-DYNA 中提供一種空材料模式*MAT_NULL 用來描述具有流體行為的材料,改材料模式本身提供本構模型來描述材料的偏應力,然后使用狀態方程EOS 來提供壓力行為組件,這樣它們一起提供材料的整個應力張量。對于每種狀態方程,壓力都可以表示為比體積和溫度的函數方程[12,20]。
NEWMARKS 法是有限元隱式動力分析中主要的分析方法。NEWMARKS 法最初是作為一種常值平均加速度法被提出的,也被看作是線性加速度法的擴展,加時系統的運動微分方程為:

式中:[M]為質量陣 ;[C]為阻尼陣;[K]為剛度陣;F為外力向量。
通過變化運動微分方程,最終可以得到有運動系統質量陣、阻尼陣、剛度陣和外力向量的含假定參數的運動微分方程,通過假定參數的數值范圍可以使運動微分方程的解無條件穩定,最終獲取系統穩定時的狀態。
1.2 數值模型
1.2.1 螺旋槳和推進軸系模型
本文參考加拿大海岸警衛R 級破冰船上裝載的四葉1200 系列R-class 冰級槳[13],選用各方面性能與之相當的ICEPROPELLER-I 設計槳為計算模型,該型螺旋槳為四葉槳,實槳直徑為4.1 m、轂徑比0.3、盤面比0.67、螺旋槳槳葉后傾10°,計算采用實尺度模型計算(模型如圖1 所示)。
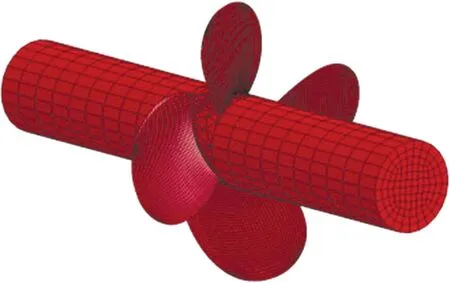
圖1 螺旋槳網格模型
實際應用中的推進軸系十分復雜,在進行數值分析的過程中適當對其進行簡化不僅不影響其動態響應還能提高計算效率。本文在建模過程中進行軸上倒角、孔槽等過渡部位的曲面簡化,軸系進行軸承、軸間接觸簡化,推進軸系重力載荷、油水支撐等載荷的簡化施加,從模型和剛度來看各軸承都是單支撐點[14],然后按照如圖2 所示的軸系簡圖進行推進軸系的模型建立。軸系全長54.2 m,軸系半徑為0.5 m,由螺旋槳軸、三段中間軸、尾軸組成,軸段長度分別為12.8 m、12.6 m、9.6 m、9.2 m、10 m。推進軸系總共8 個軸承,從螺旋槳至齒輪箱依次為后托架、前托架、尾軸管軸承、3 個中間軸承、齒輪軸前軸承與后軸承。本文為便于表述,將上述各軸承依次編號為1 號、2 號、3 號、4 號、5 號、6 號、7 號、8 號軸承。各軸承對應的軸承剛度如表1 所示。軸系的材料特性:彈性模量E= 2.1×1011N/m2,泊松比μ= 0.3,密度ρ1= 7 800 kg/m3。
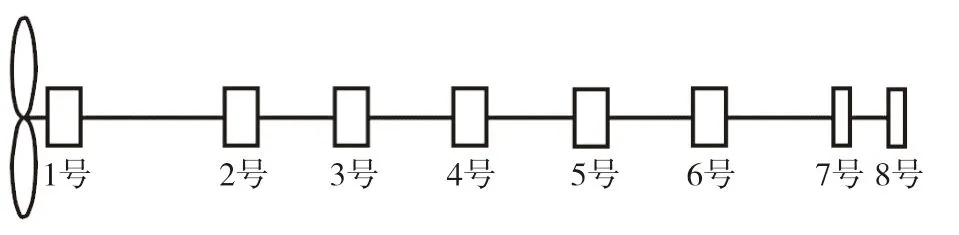
圖2 軸系簡圖

表1 各軸承的剛度N/m
1.2.2 計算工況的設定
本文對海冰的徑向位置、海冰冰塊大小和海冰速度大小進行變參數計算,關于海冰和螺旋槳接觸的冰載荷是在LS-DYNA 中獲取。本文中海冰采取正六面體空間形狀進行海冰和螺旋槳碰撞的數值模擬;同時,變參數海冰的網格的劃分皆采用一種方式進行劃分以確保變量的統一;為兼顧求解結果的準確性和求解效率,經過多次計算比較,選擇0.04 m 的網格密度對海冰進行劃分。
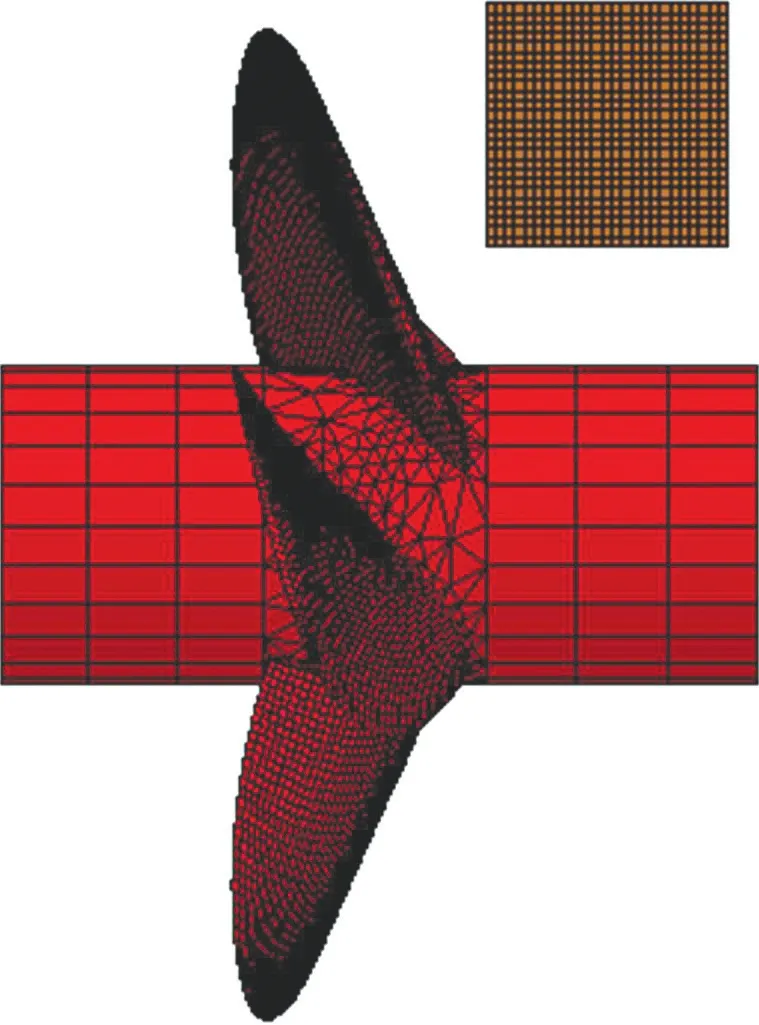
圖3 海冰與螺旋槳的相對位置
對于海冰在螺旋槳不同徑向位置的模型如下頁圖3 所示,海冰位置以海冰中心位置距離槳軸中線的徑向垂直距離為準,徑向垂直距離以螺旋槳半徑(R)基準,分別取0.8R、0.9R和1.0R,螺旋槳轉速統一取30 r/min,海冰前進速度與流域速度均為1.2 m/s,海冰邊長1.0 m。通過改變正六面體海冰的邊長進行海冰大小的變參數模型建立,海冰邊長分別取0.80 m、1.00 m 和1.25 m,海冰的徑向位置統一取0.9R,海冰前進速度與流域速度均為1.2 m/s,螺旋槳轉速為30 r/min;海冰的速度可以通過軟件速度參數設置進行控制從而獲取其冰載荷,海冰速度取0.8 m/s、1.2 m/s 和1.6 m/s,海冰隨流域的速度改變而改變,流域速度與海冰一致,海冰邊長統一取1.0 m,海冰徑向位置統一取0.9R,螺旋槳轉速仍統一取30 r/min。
2 變參數分析
2.1 海冰-螺旋槳耦合動態分析
為驗證本文獲取海冰和螺旋槳接觸碰撞載荷方法的正確性,本文結合Kim 的球型冰沖擊試驗[15]進行數值模擬驗證,圖4 為計算模型、圖5為數值驗證。通過和Kim 的實驗對比發現獲取的載荷和實驗符合程度較好,證明本文獲取冰載荷的方法是正確的。計算海冰邊長1.0 m、速度1.2 m/s、海冰徑向0.9R時螺旋槳的冰載荷曲線,提取冰載荷中軸向力Fx、垂向力Fz、軸向彎矩Mx和水平彎矩My,各個力學分量的示意圖如圖6 所示,計算結果參見下頁圖7。
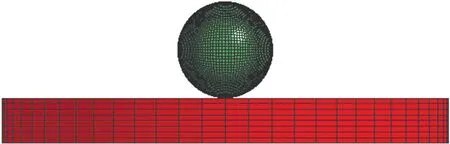
圖4 沖擊計算模型
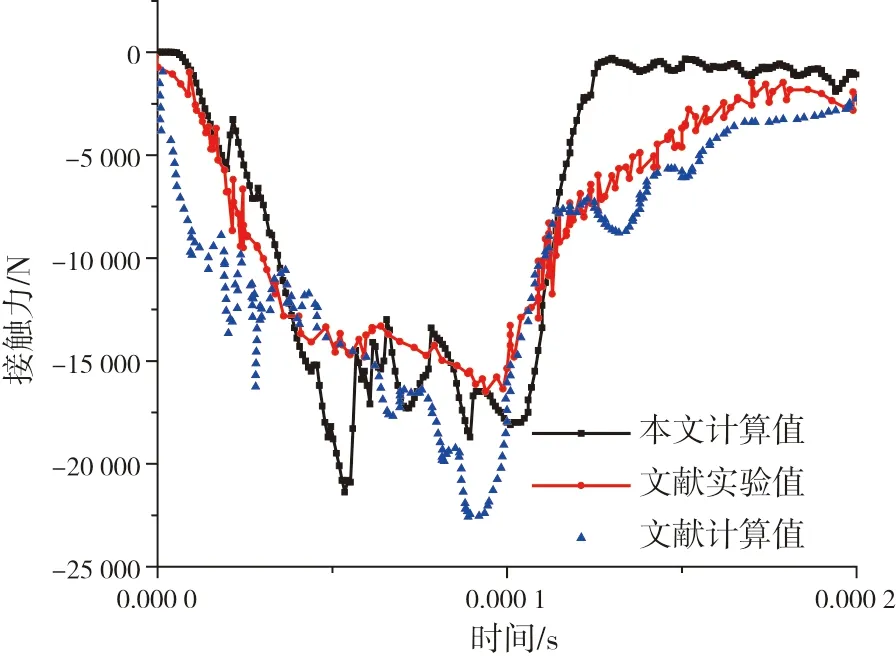
圖5 接觸力時程曲線
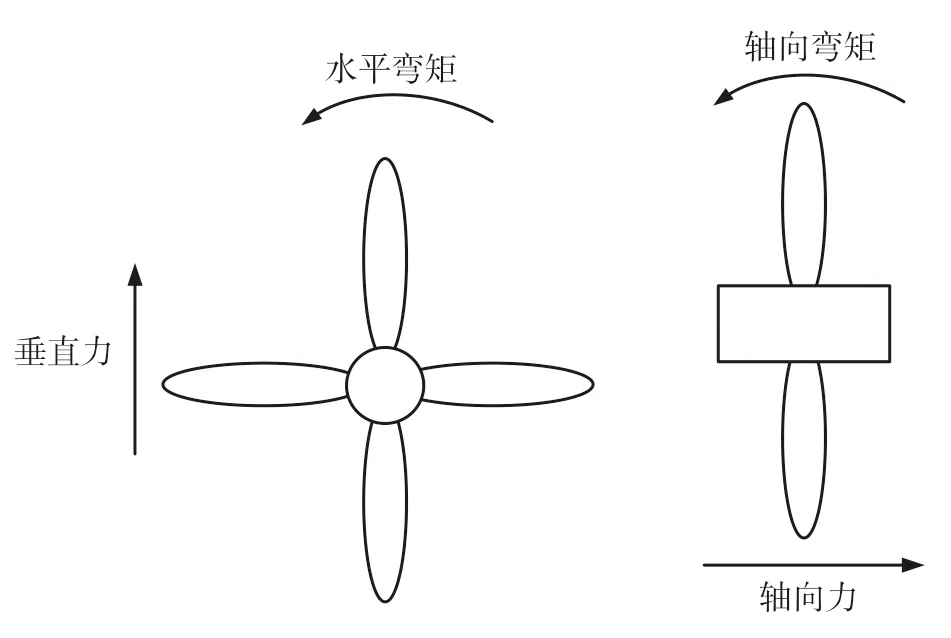
圖6 螺旋槳所受力和彎矩示意圖
把力和力矩結果輸入ABQUAS運用NEWMARKS法,計算得到推進軸系軸承、推進軸的動態響應情況,分析海冰-螺旋槳接觸載荷對螺旋槳和軸系的影響計算得到不同軸承的等效應力(即屈服準則的值)、應變以及扭矩響應時域圖,通過對比得知冰載荷對尾托架即1 號軸承的影響最大,故在進行海冰不同參數產生的冰載荷對軸系的影響時,以1 號軸承作為分析的重點,其動態響應圖如圖8所示。

圖7 冰載荷時間歷程曲線
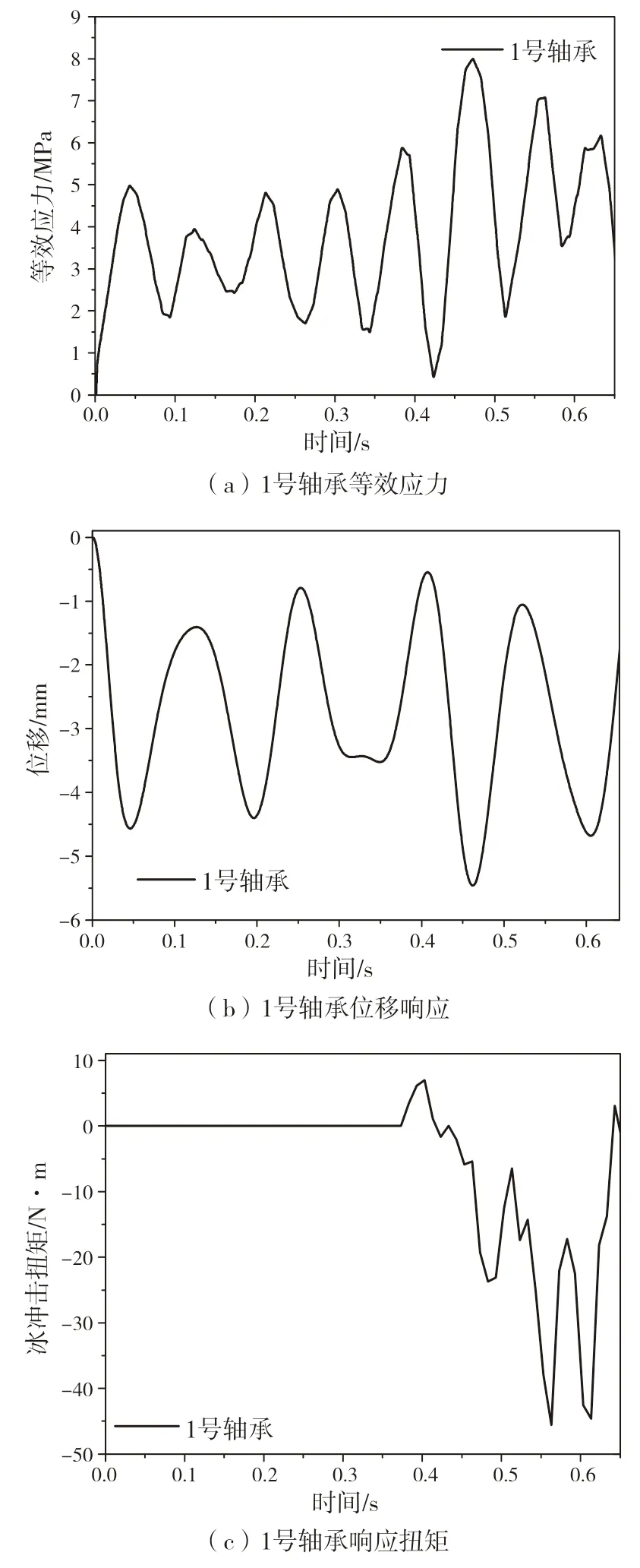
圖8 1號軸承動態響應圖
2.2 海冰不同徑向位置軸系動力響應分析
計算得到海冰和螺旋槳接觸下冰載荷,提取冰載荷的軸向力Fx、垂向力Fz、軸向彎矩Mx、水平彎矩My,得到如圖9 所示的海冰不同徑向位置冰載荷時間歷程曲線。圖中A、B、C三點分別是位于不同半徑處的冰塊和螺旋槳接觸的時刻,分別為0.278 s、0.369 5 s、0.477 s。海冰越靠近槳軸中心線,與槳葉接觸時間越早,反之則越晚。表2 給出冰載荷不同分量在冰槳接觸過程中的峰值及不同半徑處峰值對比結果,其表明改變海冰徑向位置對冰載荷的軸向力、垂向力影響較大。對于不同徑向位置的海冰,雖然海冰的強度相同,但海冰和螺旋槳接觸面積與兩者間的碰撞角度不同,從而導致兩者的接觸冰載荷不同。
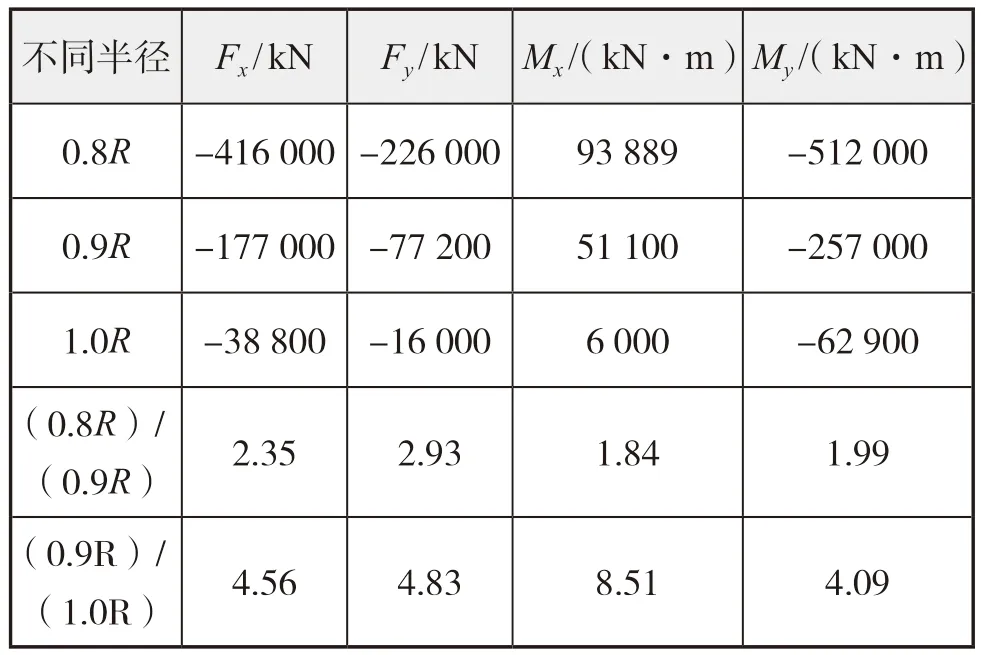
表2 海冰位于不同半徑處的冰載荷分量峰值
圖9 為海冰不同徑向位置冰載荷時間歷程曲線。從圖中可以看出,海冰位于0.8R處時,海冰和螺旋槳的接觸時間大于海冰位于0.9R處的,0.9R處的又大于1.0R處。可見,越靠近槳軸中心線,海冰脫離槳盤面的時間越久,海冰和螺旋槳接觸時間越久,會導致螺旋槳切入海冰的深度增加,最終導致海冰和螺旋槳接觸面積增加以及海冰和螺旋槳接觸載荷增加;這也說明圖中越靠近槳軸中線,海冰和螺旋槳接觸載荷峰值出現的時間越早,且峰值越大。
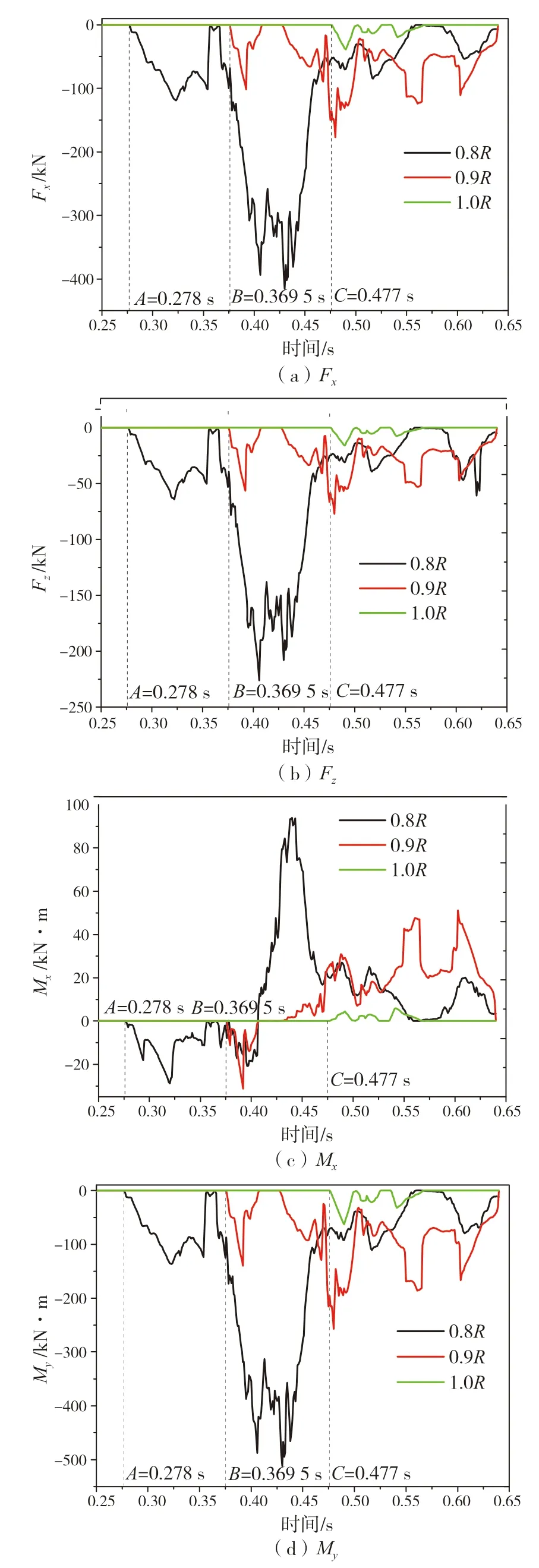
圖9 海冰不同徑向位置冰載荷時間歷程曲線
冰載荷下的軸系動態響應中,1 號軸承(后托架軸承)所受冰載荷的影響最大。下頁圖10 是海冰不同位置冰載荷下,后托架軸承的位移、等效應力和響應扭矩時域圖,表3 給出不同徑向處的最大位移、最大等效應力和最大扭矩結果。
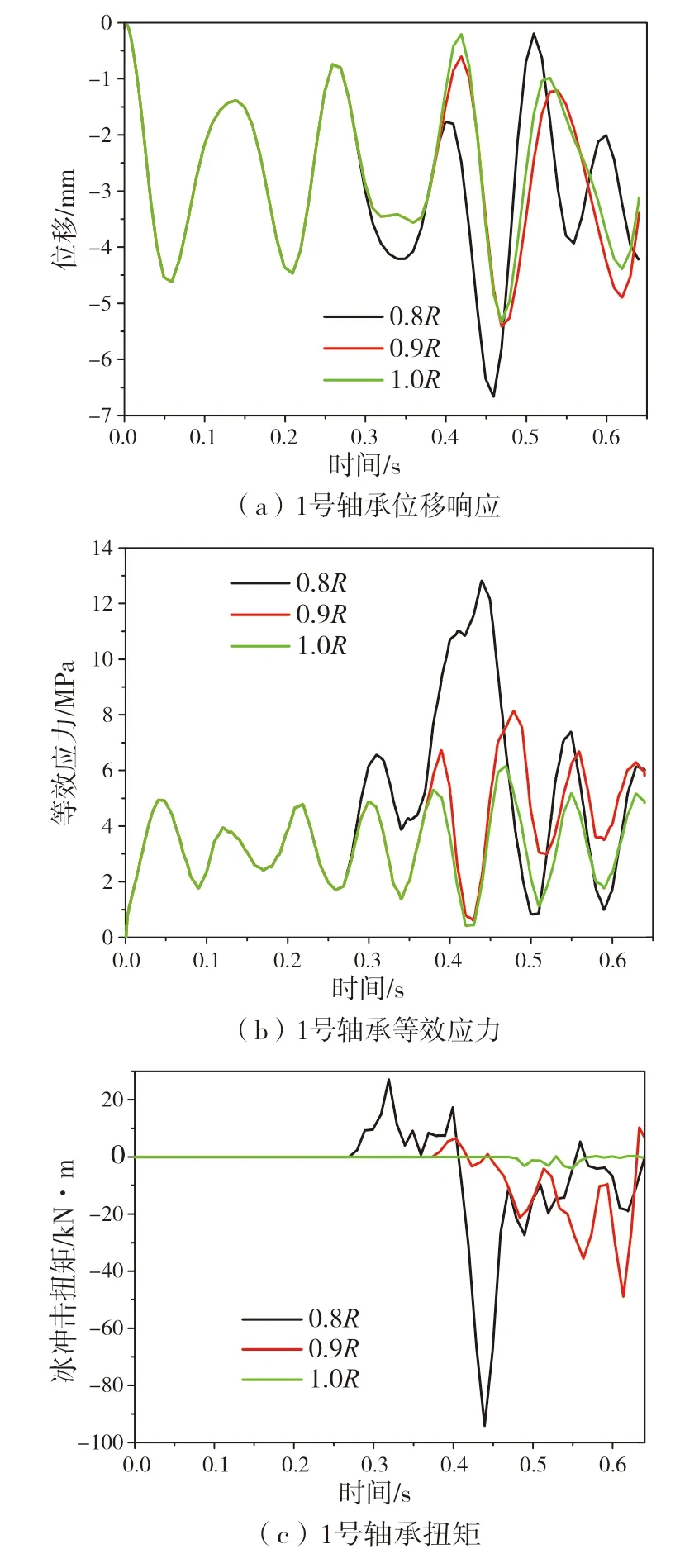
圖10 海冰不同位置冰載荷下1號軸承動態響應時域圖
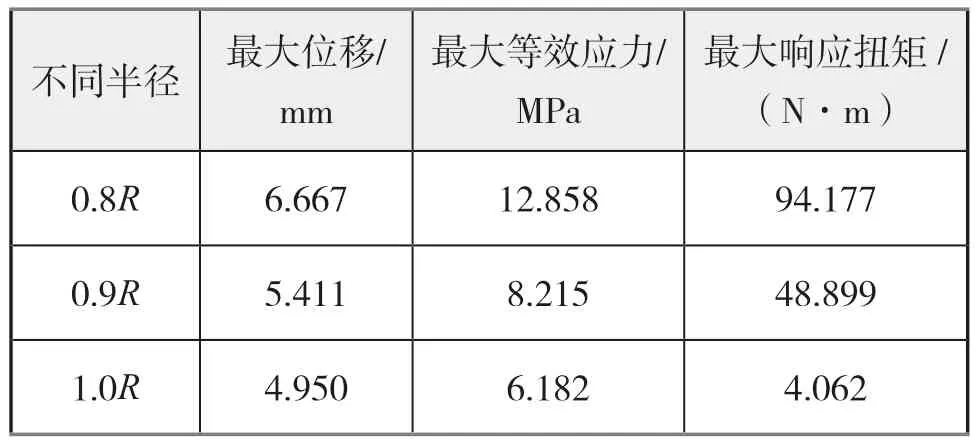
表3 海冰位于不同徑向處的1號軸承動態響應值
從計算結果來看:推進軸系遭受的載荷或結構響應的極值的時刻與冰槳接觸碰撞的時刻大抵一致。由此可推斷,冰槳碰撞產生的載荷會顯著影響推進軸系,尤其可以看出隨著海冰與螺旋槳的徑向相對位置減小或者海冰在槳盤面的投影面積增大,軸系的結構響應也隨之增大,而海冰和螺旋槳徑向相對位置的減小或海冰在槳盤面投影面積的增大是冰槳碰撞載荷增加的直觀體現。由此可知,軸系的結構響應與冰槳碰撞載荷成正比。由該圖可見,在海冰尺寸相同的情況下,海冰軸向位置愈靠近槳軸中心,兩者之間碰撞接觸的時間愈長,碰撞載荷亦愈大,故而軸系的結構響應幅值越大。把簡化的軸系看視為一根懸臂梁,則可以推斷在更長且更大的冰載荷條件下,軸系的變形必然是最顯而易見的;冰槳之間的載荷主要以扭矩的方式傳遞至軸系,且與載荷成正線性相關。
2.3 海冰不同尺寸軸系動力響應分析
軸系的動力響應不僅和海冰徑向位置有關,還與海冰的尺寸有關,在實際航行狀態下,推進軸系遭遇的海冰尺寸具有一定的隨機性,與其航行水域的海冰分布有關系[14-16]。不同航行區域的海冰因為氣候環境、水文環境等原因導致冰的大小不同,所以研究不同尺寸海冰對軸系的影響十分必要。
下頁圖11 給出不同海冰尺寸下的冰載荷分量的時域曲線圖。從中可看出:海冰邊長0.8 m 時海冰和螺旋槳接觸時間最晚,碰撞周期最短,接觸力也是最小,冰載荷的最大值隨著海冰尺寸的增大而逐步上升,產生這一現象的原因是海冰的尺寸越大,海冰和螺旋槳銑削時的接觸面積越大,導致冰載荷力越大;同理,海冰尺寸越大,海冰和螺旋槳接觸的時間越早。從軸向力、垂向力的時域曲線上可以發現,海冰邊長1.25 m 的情況下冰載荷達到峰值的時間最短,碰撞周期最長,說明海冰尺寸的增大導致海冰和螺旋槳碰撞過程中相對速度的增大和接觸面積的增大。
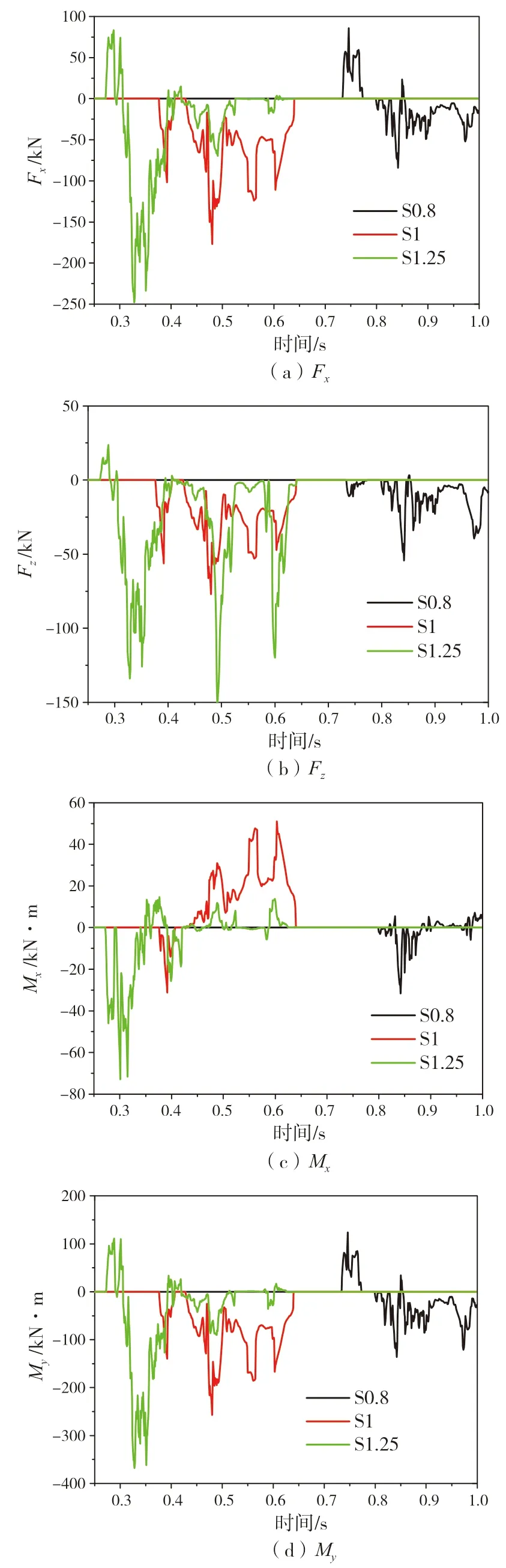
圖11 海冰不同尺寸冰載荷時間歷程曲線
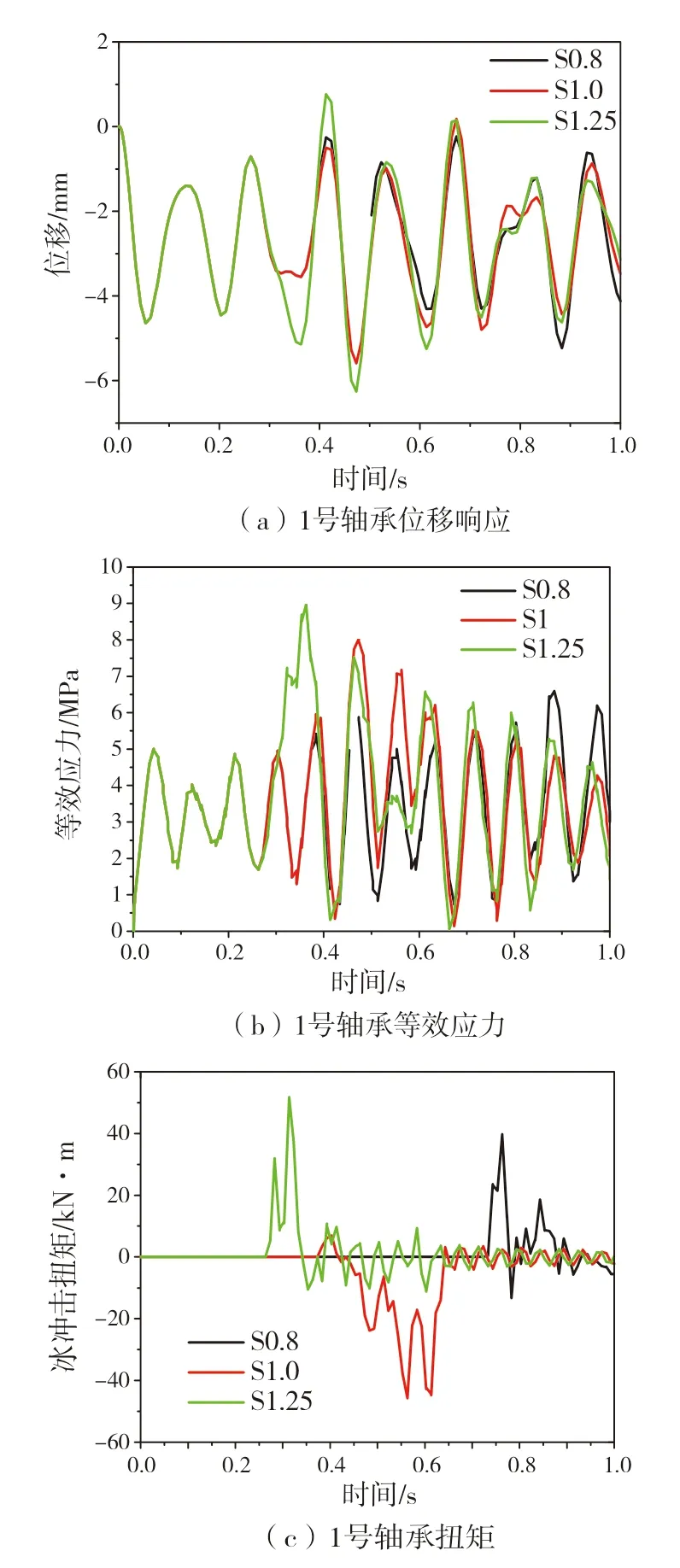
圖12 海冰不同尺寸冰載荷下后托架動態響應時域圖
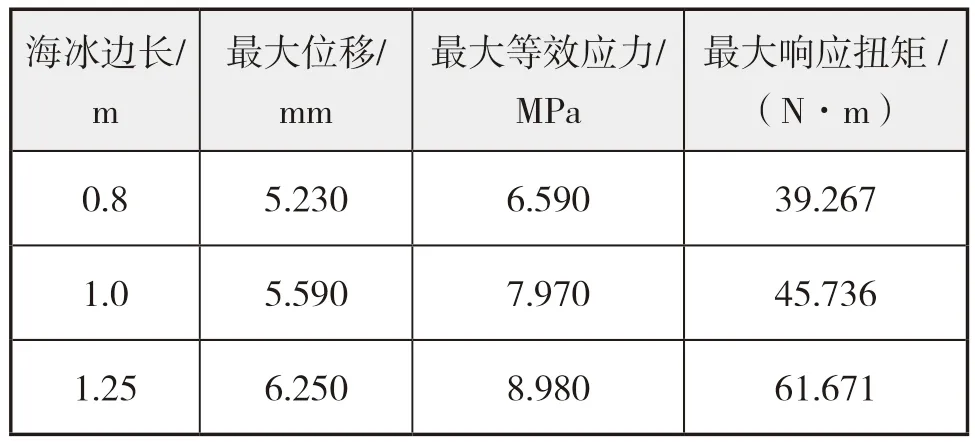
表4 不同海冰邊長下的1號軸承動態響應最大值
海冰尺寸不同時后托架軸承動態響應如圖12所示,各參數的最值如表4 所示。通過對比分析圖12 和表4 可以發現本文計算選用的軸系直徑較大。從中可以看出:以海冰邊長為1.25 m 為臨界,當海冰尺寸小于此值時,冰槳之間的碰撞載荷明顯小于海冰尺寸大于該值時,但無論哪種海冰尺寸,軸系響應的極值與冰槳碰撞載荷的極值出現的時刻基本一致,說明兩者的碰撞載荷對軸系影響較為顯著,也從側面證明冰槳之間的接觸面積愈大,兩者之間的碰撞載荷也愈大。
2.4 海冰不同速度下的結果分析
船舶在不同海域航行,受風、流等氣象因素以及船舶航行速度、狀態等影響,海冰與螺旋槳接觸時的速度也不一樣[14-16]。本節計算不同海冰速度下的海冰和螺旋槳接觸冰載荷冰,并提取軸向力Fx、垂向力Fz、軸向彎矩Mx、水平彎矩My時域變化曲線(如圖13 所示)。
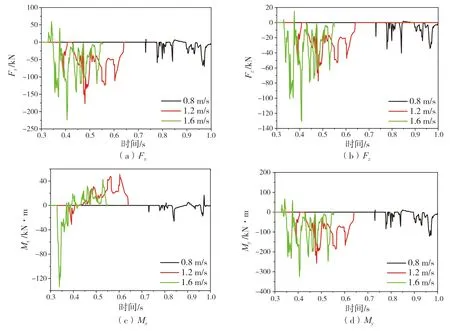
圖13 海冰不同速度冰載荷時間歷程曲線
由結果可知,海冰移動速度相同且為低速,冰槳之間的相對距離比其他速度時更長,進而可以推斷冰槳接觸之前螺旋槳的相對旋轉位置與海冰移動速度高時不同。結合圖14 可以看出:冰槳的接觸位置由高速時的槳葉1 轉換為槳葉2,從而出現在圖13 中海冰移動速度較低時,冰槳之間的碰撞載荷出現時刻比其他兩個工況晚;另外,由于海冰的移動速度不同進而造成海冰和螺旋槳發生碰撞的位置不同,直接造成兩者之間的碰撞載荷不同。
從圖13 中可以看出:海冰移動速度最大時,冰槳之間的碰撞載荷持續時間最短;并且載荷如軸向力、垂向力均值較其他兩個航速工況更大。從海冰自身角度來講,由于海冰的移動速度增大,其自身的動能增大,接著導致冰槳接觸時的碰撞載荷增大,螺旋槳和軸系由此產生的結構響應增大,這同上面的載荷曲線變化相吻合。
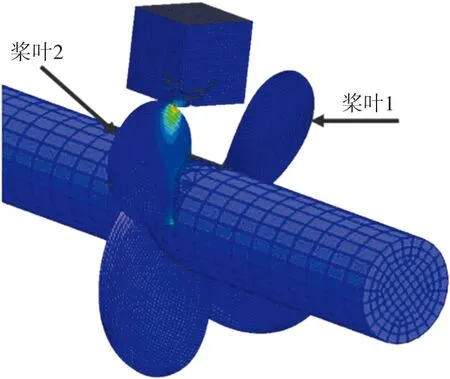
圖14 冰槳接觸
圖15 是海冰速度不同時,后托架的動態響應時域圖,表5 對應為各參數曲線的最大值。對比圖15(a)中曲線可知,后托架軸承的位移值為負,說明軸系向下進行動態響應;海冰速度為0.8 m/s時,后托架的位移時域曲線較為均勻平緩,但在t= 0.47 s 時刻,三種海冰速度下,后托架的位移皆出現一個較大的峰值。對于海冰速度為1.2 m/s 和1.6 m/s 的情況,由于冰載荷在該時刻存在峰值,故可能由于冰載荷峰值原因致使位移曲線出現峰值;對于海冰速度為0.8 m/s 的情況,由于這個時刻海冰和螺旋槳還未接觸,所以可能是阻塞效應造成的螺旋槳冰載荷的增加,進而導致后托架軸承位移響應出現峰值。結合下頁表5 可知軸承的最大位移值并不是特別大,主要原因仍是該推進軸自身較粗,與實際船舶的推進軸存在差異,導致數值計算結果偏于保守。如何能更貼近實際的建模計算,則是后續的研究工作。由圖15(b)可看出,海冰速度為1.6 m/s 時,后托架軸承等效應力的整體曲線對比以上兩種速度工況幅值有明顯增大,且在這種工況下托架軸承的等效應力達到最大,其主要是冰所獲得的動能轉化為軸系自身的變形能所造成的,即轉化為較大的冰載荷。形成的冰載荷增加了托架軸承所受的等效應力和水平彎矩。同時,由以上分析可知,水平彎矩在海冰行進速度最大時達到最大,所以等效應力的最大值也應在海冰速度為1.6 m/s 時。由表4 后托架軸承最大等效應力隨工況變化的曲線變化趨勢也可以看出,海冰行進速度第二次增加導致的幅度增長小于第一次海冰速度增長。由圖15(c)得出使軸系發生扭轉變形的主要原因是冰激勵扭矩,冰激勵扭矩正負交替變化造成了抗扭矩也產生相應地變化;通過后托架最大響應扭矩隨海冰速度變化圖,發現響應扭矩的最大值與海冰行進速度基本成二次相關,在海冰行進速度為1.6 m/s 時所產生的最大扭矩值大約為行進速度是0.8 m/s 所產生的扭矩7 倍;軸系的抗冰載荷扭矩取決于冰激勵扭矩的大小,冰激勵扭矩的增加會使軸系為維持原來形狀不變而產生抗冰載荷扭矩。
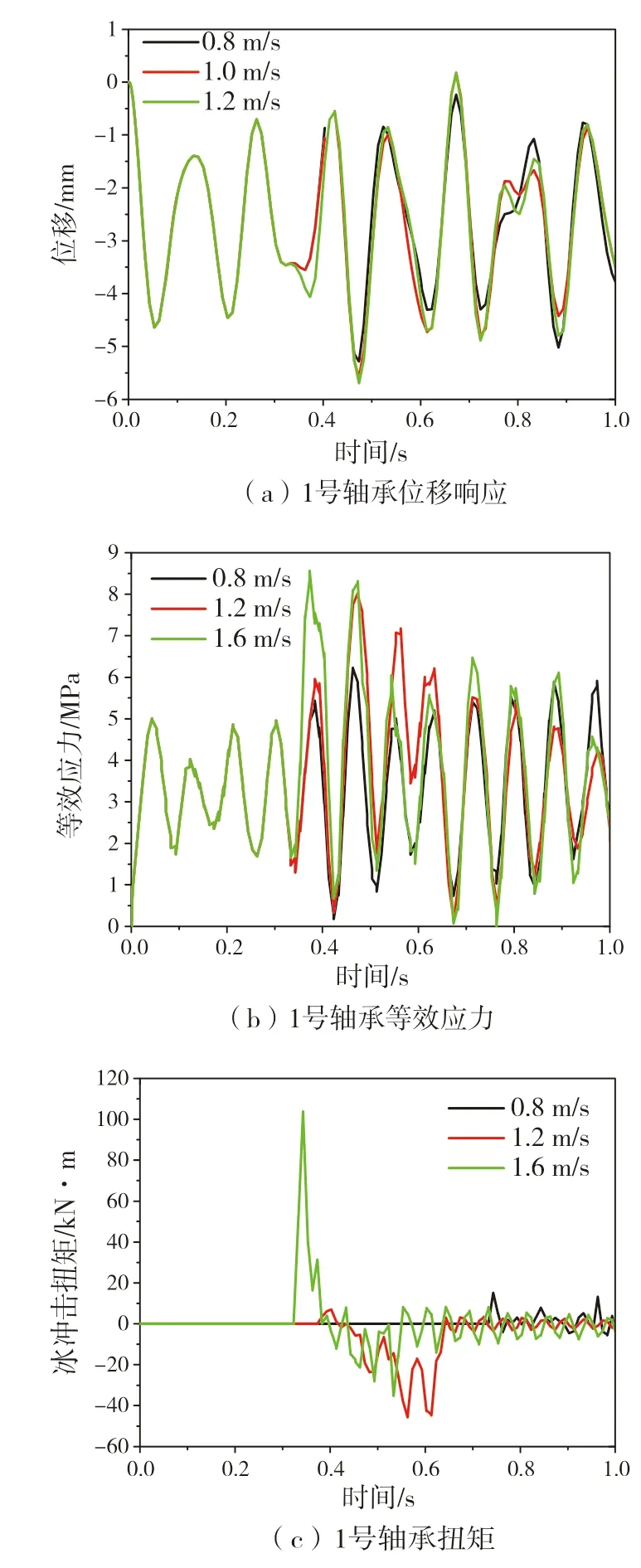
圖15 海冰不同速度時后托架軸承動態響應時域圖
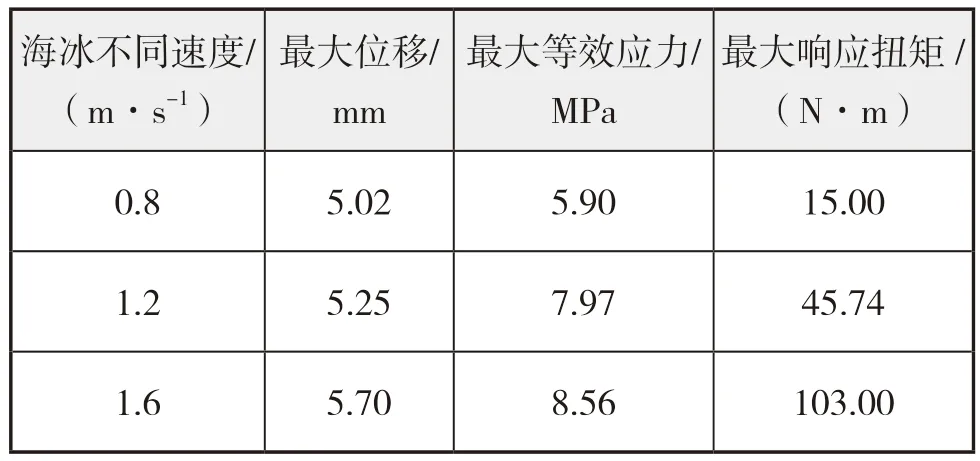
表5 不同海冰速度下的1號軸承動態響應最大值
3 結 論
本文基于采用流固耦合和有限元方法,就海冰和螺旋槳碰撞下軸系動態響應進行冰參數變化計算分析,并得出如下結論:
(1)冰槳之間的碰撞產生的冰載荷會對推進系統的軸系產生維系,尤其在推進軸系尾端靠近螺旋槳位置處的軸承結構安全威脅較大,會引起其產生劇烈的應力及位移變化。
(2)海冰與螺旋槳的相對位置越接近,即海冰與螺旋槳間的徑向相對位置或海冰在槳盤面的投影面積越大,造成兩者間碰撞載荷越大,從而增加軸系損壞的風險。因此在極地海冰較多的地區,不僅需要對螺旋槳的結構強度進行加強,保證推進系統軸系的強度對保證船舶安全也十分重要。
(3)通過上述分析可知,推進軸系后托架是整個推進軸系在遭遇冰載荷過程中最容易遭受損壞的部分;因此在軸系的設計過程中,如何加強和保證這部分的結構性能安全需要船舶設計者重點考慮,這同時也是本文寫作的初衷。
本文建立的數值計算模型與實際情況相比,由于作了較大簡化,因此導致計算結果與實際存在一定誤差,但也由此總結出一套研究變參數的方法,并初步獲得不同冰參數對軸系的影響情況,而后,我們將進一步完善數值計算模型并增加計算精度。
猜你喜歡
海洋通報(2021年5期)2021-12-21 06:19:42
海洋通報(2021年3期)2021-08-14 02:20:38
成都信息工程大學學報(2021年2期)2021-07-22 07:23:32
文萃報·周五版(2020年1期)2020-02-14 10:23:59
極地研究(2018年2期)2018-06-27 09:09:34
電子技術與軟件工程(2016年24期)2017-02-23 19:13:41
海洋世界(2016年4期)2016-06-15 01:51:28
中國學術期刊文摘(2016年8期)2016-02-13 13:04:44
河北遙感(2014年4期)2014-07-10 13:54:59
自然資源遙感(2014年3期)2014-02-27 11:56:43
