超大型集裝箱船全浪向波浪增阻預(yù)報(bào)技術(shù)研究
2019-12-26 06:06:02封培元沈興榮范佘明王金寶
船舶 2019年6期
封培元 沈興榮 范佘明 王金寶
(1. 上海市船舶工程重點(diǎn)實(shí)驗(yàn)室 上海200011;2. 噴水推進(jìn)技術(shù)重點(diǎn)實(shí)驗(yàn)室 上海201100;3.中國船舶及海洋工程設(shè)計(jì)研究院 上海200011)
引 言
船舶在波浪中航行時(shí)所受的總阻力較靜水中不同,在迎浪和艏斜浪中的總阻力均值往往較靜水中有所增大,一般稱之為波浪增阻;在艉斜浪和隨浪中同樣可能存在阻力增加的現(xiàn)象,但量值上較迎浪和艏斜浪小一些。近年來,在國際海事規(guī)范不斷推陳出新的大背景下,波浪增阻領(lǐng)域研究煥發(fā)出了全新的活力,引起了廣泛關(guān)注,成為了當(dāng)前船舶耐波性領(lǐng)域研究的熱點(diǎn)和難點(diǎn)。與波浪增阻相關(guān)的法規(guī)規(guī)范和技術(shù)標(biāo)準(zhǔn)包括:國際海事組織(IMO)推出的“新造船能效設(shè)計(jì)指數(shù)(EEDI)規(guī)范”[1]和為保障船舶在惡劣海況下能夠維持操縱性所發(fā)布的“最小推進(jìn)功率確定臨時(shí)導(dǎo)則”[2],以及國際標(biāo)準(zhǔn)化組織(ISO)新版的“實(shí)船測試航速和功率數(shù)據(jù)修正導(dǎo)則”[3]和國際拖曳水池大會(huì)(ITTC)正在更新中的“實(shí)船測試航速/功率數(shù)據(jù)分析推薦規(guī)程”[4]等,其中均對波浪增阻的正確預(yù)報(bào)提出了一定的要求。特別在進(jìn)行實(shí)船測試的航速和功率修正時(shí),需要用到全浪向中的波浪增阻信息,因?yàn)閷?shí)船試航時(shí)難以保證船舶始終以迎浪狀態(tài)航行,而艏斜浪中的波浪增阻有時(shí)較迎浪中更為顯著(參見德國漢堡水池公開發(fā)表的試驗(yàn)結(jié)果[5]);另外,船舶在艉斜浪和隨浪中航行時(shí)也可能遭受波浪增阻的影響,而目前的實(shí)船測試航速修正中均未考慮此類情況,這對于船舶交付是不利的。因此,有必要對全浪向下的波浪增阻預(yù)報(bào)及試驗(yàn)驗(yàn)證方法開展研究。
已有的波浪增阻理論計(jì)算方法早就能夠?qū)θ讼碌牟ɡ嗽鲎柽M(jìn)行預(yù)報(bào)。日本的Maruo[6]早在1980 年就提出了一種基于遠(yuǎn)場公式的簡化計(jì)算方法,然而國內(nèi)當(dāng)前主流的與波浪增阻相關(guān)的研究,無論是船型優(yōu)化[7-9]還是先進(jìn)數(shù)值計(jì)算研究[10-15],幾乎都只關(guān)注迎浪中的波浪增阻。其中很重要的一個(gè)原因就是缺乏可靠的迎浪以外浪向的波浪增阻試驗(yàn)數(shù)據(jù)用于對計(jì)算結(jié)果進(jìn)行驗(yàn)證。傳統(tǒng)的波浪增阻試驗(yàn)往往采用拖航方式,試驗(yàn)時(shí)約束模型的橫蕩和搖艏運(yùn)動(dòng),因此僅適用于迎浪和隨浪兩種浪向。為能將拖航方法拓展至全浪向范圍,德國漢堡水池專門開發(fā)了六自由度的適航儀[5],但該試驗(yàn)設(shè)備結(jié)構(gòu)復(fù)雜、造價(jià)高昂,且橫向和縱向運(yùn)動(dòng)由彈簧約束,仍可能對模型運(yùn)動(dòng)產(chǎn)生限制作用,從而影響試驗(yàn)結(jié)果。國際拖曳水池會(huì)議(ITTC)的耐波性委員會(huì)和船舶營運(yùn)性能委員會(huì)均密切關(guān)注著該問題的研究進(jìn)展。船舶在斜浪中的增阻試驗(yàn)技術(shù)難度很高,目前國際上還未達(dá)成統(tǒng)一的試驗(yàn)方法和規(guī)范流程;并且由于受制于試驗(yàn)技術(shù)的局限性,也難以對現(xiàn)有理論方法得到的結(jié)果進(jìn)行驗(yàn)證,因而理論模型也較長時(shí)間無法有大的發(fā)展。
本研究中基于勢流理論和經(jīng)驗(yàn)修正方法建立了超大型集裝箱船在任意浪向規(guī)則波中的波浪增阻預(yù)報(bào)方法并編制了相應(yīng)的計(jì)算程序;基于自由自航模方法開展了超大型集裝箱船在全浪向中的波浪增阻模型試驗(yàn)研究;通過兩者間的相互驗(yàn)證從而證明所建立的數(shù)值預(yù)報(bào)模型與模型試驗(yàn)方法的正確性。
1 全浪向波浪增阻數(shù)值預(yù)報(bào)方法
本文所建立的全浪向波浪增阻預(yù)報(bào)數(shù)值預(yù)報(bào)方法基于頻域勢流三維面元法進(jìn)行耐波性計(jì)算,再基于遠(yuǎn)場公式對波浪增阻進(jìn)行預(yù)報(bào)。聯(lián)合希臘雅典科技大學(xué),自主開發(fā)了數(shù)值計(jì)算軟件“Newdrift”。
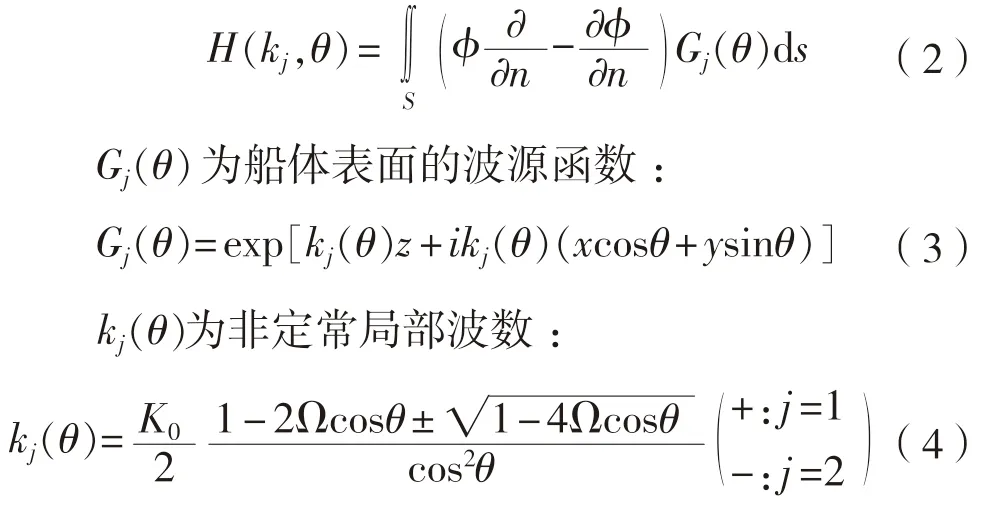
根據(jù)線性勢流理論,將速度勢分為三部分進(jìn)行獨(dú)立研究,分別為入射勢、輻射勢和繞射勢,并且將波浪增阻分為輻射增阻RAWR與繞射增阻RAWD,由此推導(dǎo)出的波浪增阻遠(yuǎn)場公式如下:

式中:θ為船體所激發(fā)的元波的方向;參數(shù)Ω =ωeV/ g;K0= g /V2為定常波數(shù);被積分的柯欽函數(shù)的定義如下:
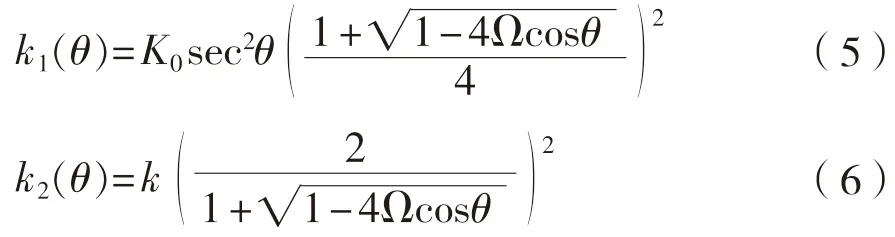
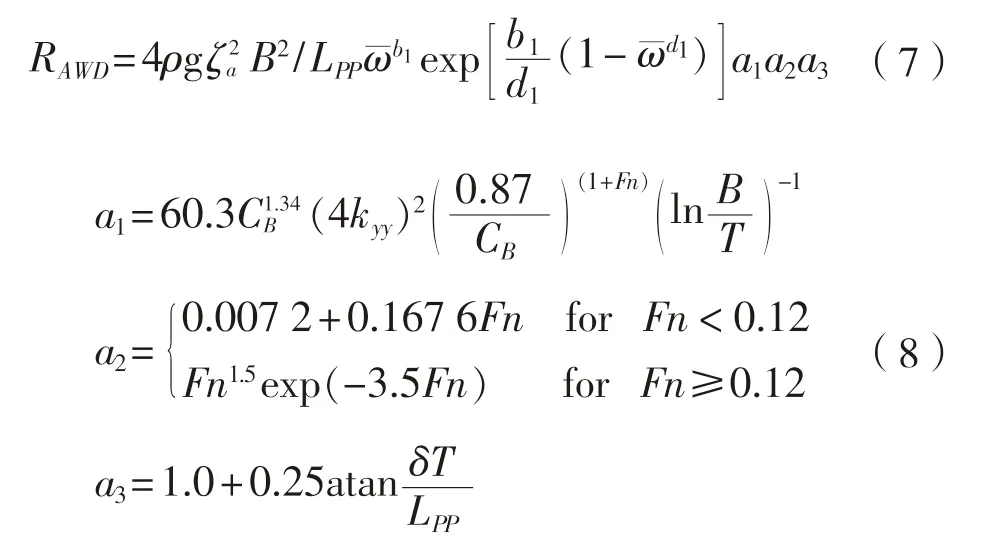
波長相對較短的情況下(即λ/L< 0.5),船體運(yùn)動(dòng)幅度不大,波浪增阻的主要成分是繞射增阻,并且粘性和碎波現(xiàn)象較為嚴(yán)重,基于勢流理論的方法難以準(zhǔn)確預(yù)報(bào)計(jì)算增阻,故一般進(jìn)行經(jīng)驗(yàn)修正。基于大量的理論研究并對實(shí)驗(yàn)數(shù)據(jù)進(jìn)行分析,希臘雅典科技大學(xué)的劉樹魁和Papanikolaou[16]推出了一個(gè)新型的經(jīng)驗(yàn)公式用于繞射效應(yīng)增阻RAWD的近似計(jì)算,公式具體形式如下:


2 基于自由自航的全浪向波浪增阻試驗(yàn)研究
傳統(tǒng)的波浪增阻試驗(yàn)研究以迎浪為主,通常采用約束模方法,利用拖車拖曳船模保持恒定航速在波浪中前進(jìn),并利用力傳感器測量船模所受的波浪力時(shí)歷,分別在靜水中和波浪中開展試驗(yàn),以所測得的波浪力時(shí)歷的差值作為波浪增阻值。然而,傳統(tǒng)的約束模方法對于全浪向(特別是斜浪)中的增阻試驗(yàn)不再適用,因?yàn)樾崩酥写l(fā)生較大幅度的橫搖、橫蕩和搖艏運(yùn)動(dòng),若采用約束模方法,則會(huì)對船模運(yùn)動(dòng)產(chǎn)生限制。另外,即使在迎浪和隨浪中開展試驗(yàn)時(shí),由于必須借助適航儀拖動(dòng)船模前進(jìn),因此對船模的縱蕩運(yùn)動(dòng)模態(tài)也會(huì)產(chǎn)生限制。目前一般采用彈簧約束的方式使船模在前進(jìn)過程中仍能在縱蕩自由度上保持一定程度的波頻振蕩運(yùn)動(dòng),以此更真實(shí)地模擬實(shí)船在波浪中的運(yùn)動(dòng)特性,但波浪增阻的測試結(jié)果或多或少會(huì)受到影響。
采用自由自航模方式開展試驗(yàn)則能有效解決上述問題,對船模在斜浪、橫浪等非迎(隨)浪狀態(tài)下航行時(shí)的運(yùn)動(dòng)不會(huì)產(chǎn)生任何限制,通過測量并對比螺旋槳發(fā)出的推力在波浪和靜水中的差值來體現(xiàn)波浪增阻的程度。
整個(gè)自航模測試系統(tǒng)如下頁圖1 所示,需在船模上安裝全套的推進(jìn)系統(tǒng),包括螺旋槳、用于測量螺旋槳推力的動(dòng)力儀、用于驅(qū)動(dòng)槳并控制槳轉(zhuǎn)速的伺服電機(jī)、伺服電機(jī)驅(qū)動(dòng)器,以及給電機(jī)供電的電池單元;另外,還需在船模上安裝一套自動(dòng)舵系統(tǒng),包括舵、舵機(jī)、航向角陀螺、舵機(jī)控制模塊和自動(dòng)舵系統(tǒng)的動(dòng)力模塊。
試驗(yàn)前,首先對船模的重量重心和轉(zhuǎn)動(dòng)慣量進(jìn)行調(diào)節(jié),使模型與實(shí)船間滿足傅汝德數(shù)相似條件。正式試驗(yàn)時(shí)先進(jìn)行靜水中的試驗(yàn),再開展相同模型狀態(tài)下的波浪中試驗(yàn)。測試開始時(shí),啟動(dòng)螺旋槳并使其以指定的轉(zhuǎn)速旋轉(zhuǎn)并推動(dòng)船模按所要求的航速前進(jìn);船模在波浪中發(fā)生失速時(shí)應(yīng)及時(shí)調(diào)節(jié)槳的轉(zhuǎn)速確保模型速度達(dá)到試驗(yàn)工況指定值。在此過程中,自動(dòng)舵系統(tǒng)用于保持船模的航向。由于船模在航行過程中受波浪作用會(huì)偏離既定航向,自動(dòng)舵系統(tǒng)會(huì)根據(jù)航向角陀螺采集到的實(shí)時(shí)航向角信息由控制模塊產(chǎn)生一個(gè)用于糾正航向的舵角反饋,并由舵機(jī)實(shí)現(xiàn)操舵,以此實(shí)現(xiàn)航向保持。

圖1 自航模測試系統(tǒng)
分析試驗(yàn)測得的螺旋槳推力數(shù)據(jù),波浪中和靜水中的平均值之差即為波浪增阻值。需要說明的是,由此得到的波浪增阻結(jié)果中既包含了波浪力的作用,還包含了波浪中螺旋槳推進(jìn)效率變化和操舵的影響,因此更為全面。當(dāng)然,一般規(guī)則波中試驗(yàn)時(shí)為保證線性假定不會(huì)采用大的波高,因此螺旋槳推進(jìn)效率變化不大,為保持航向而產(chǎn)生的操舵也有限;但對于惡劣海況下的模型試驗(yàn),這些額外影響的重要性就將有所體現(xiàn),特別是存在螺旋槳飛車情況時(shí)。
采用自由自航模方法,針對一型集裝箱船在我院拖曳水池中開展了包含艏斜浪、橫浪、艉斜浪等多個(gè)浪向下的模型試驗(yàn)。
該拖曳水池長280 m、寬10 m、水深5 m,拖車最高速度可達(dá)9 m/s。水池同時(shí)配備有池端和池側(cè)造波機(jī),可生成各種浪向下的規(guī)則波和不規(guī)則波。其中,池端造波系統(tǒng)由4 臺(tái)單板造波機(jī)組成,可以生成周期0.5 ~ 5.0 s 的規(guī)則波(最大波高0.5 m);池側(cè)造波系統(tǒng)由160 臺(tái)造波機(jī)組成,每塊搖板寬0.5 m,可以生成周期0.5 ~ 3.0 s 的規(guī)則波(最大波高0.3 m),浪向范圍±45°。
如圖2 所示,試驗(yàn)對象為一艘超大型集裝箱船,木模縮尺比為60,其主要參數(shù)如表1 所示。在試驗(yàn)準(zhǔn)備階段通過壓載配置使船模的重心位置和橫向、縱向慣量達(dá)到指定值。

圖2 試驗(yàn)?zāi)繕?biāo)船模型
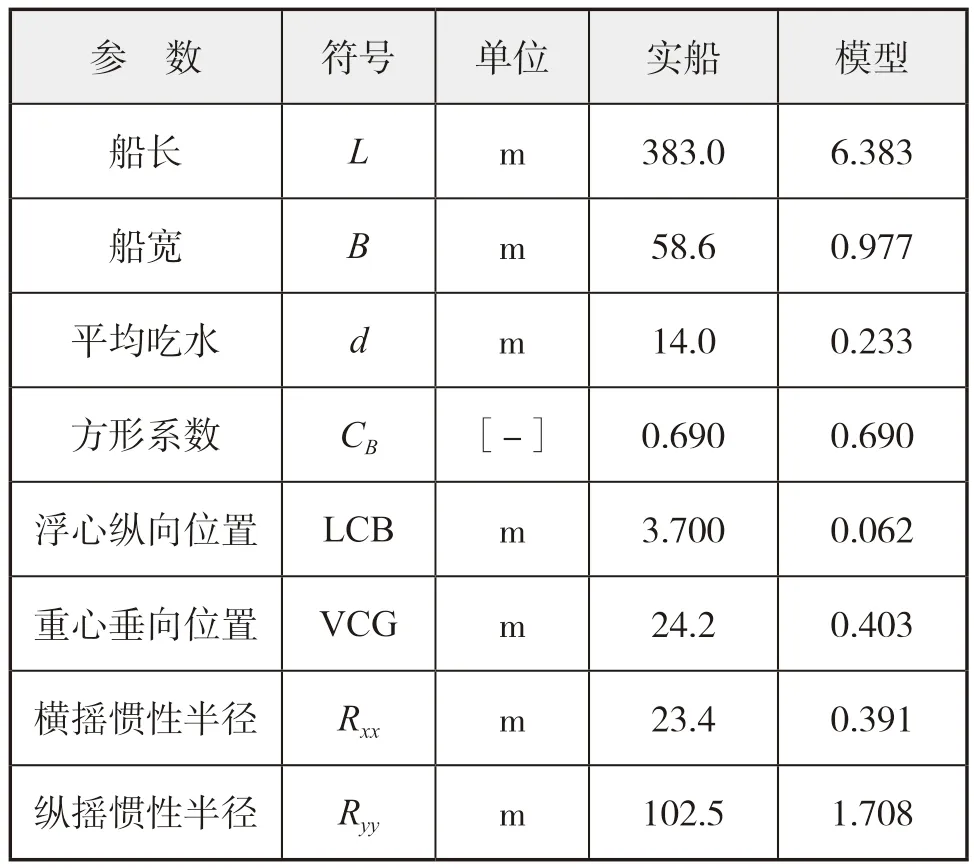
表1 試驗(yàn)?zāi)繕?biāo)船主要參數(shù)
船模上所安裝的自動(dòng)舵系統(tǒng)如圖3 所示,采用比例控制策略實(shí)現(xiàn)航向角的快速糾偏;航向角陀螺型號為HT-CJY-3,航向精度偏差在10 min 內(nèi)小于0.6°。
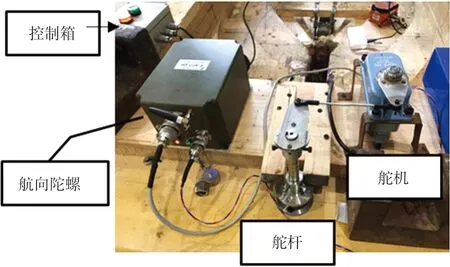
圖3 試驗(yàn)船模所用自動(dòng)舵系統(tǒng)
用于測量螺旋槳推力的動(dòng)力儀為CUSSONS R31,可測量的最大推力為100 N,扭矩為4 Nm,最大轉(zhuǎn)速限制為50 r/min,推力和扭矩的測量精度可達(dá)0.15%FS。推力的采樣頻率為20 Hz。螺旋槳轉(zhuǎn)速由伺服電機(jī)控制,精度可達(dá)0.01 r/min,足夠滿足本次試驗(yàn)對航速調(diào)控的精度要求。
在拖曳水池中開展試驗(yàn)的過程如下(如圖4 所示):船模位于側(cè)橋之間,待造波穩(wěn)定后啟動(dòng)船模上的螺旋槳和自動(dòng)舵,同時(shí)啟動(dòng)拖車跟隨船模一同前進(jìn);拖車上架設(shè)2 臺(tái)攝像機(jī)用于觀察船模與拖車間的相對位置,根據(jù)船模和拖車間的速度關(guān)系實(shí)時(shí)調(diào)節(jié)螺旋槳的轉(zhuǎn)速,確保船模的前進(jìn)速度與拖車一致。另外,在水池中布置固定式的浪高儀,用于測量規(guī)則波的波高和周期。
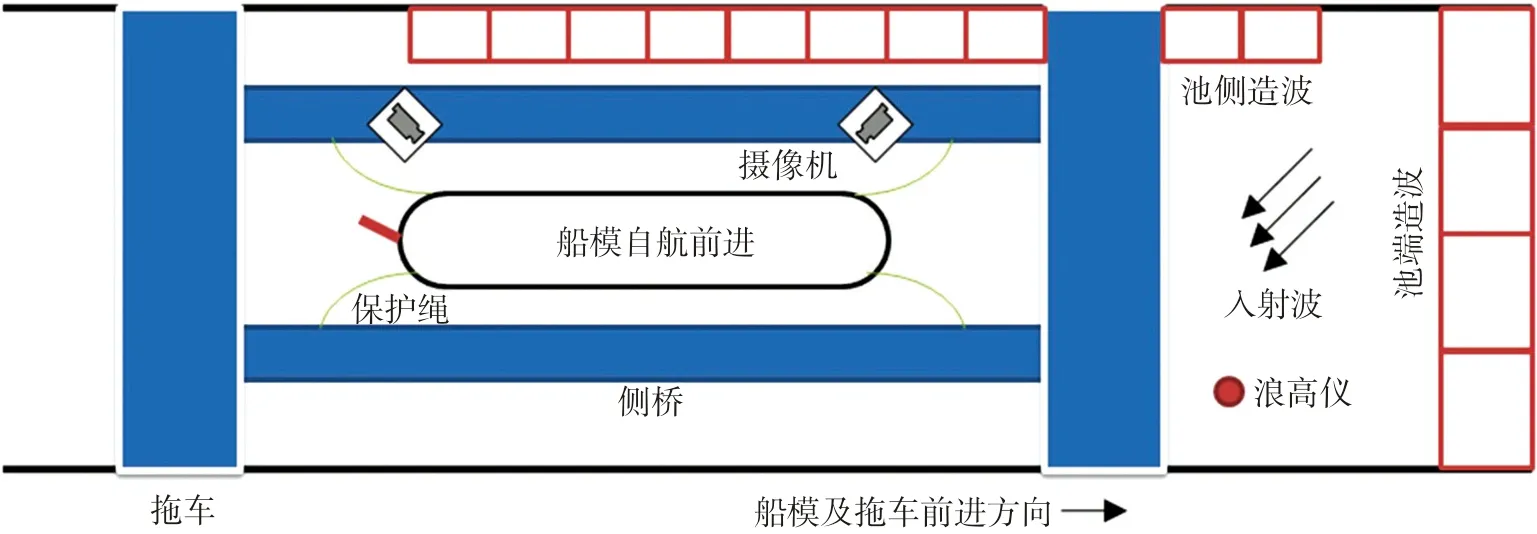
圖4 試驗(yàn)布局示意
針對目標(biāo)集裝箱船的滿載吃水狀態(tài),開展了服務(wù)航速22.5 kn(對應(yīng)模型速度1.49 m/s)下5 個(gè)不同浪向規(guī)則波中的波浪增阻試驗(yàn),包括迎浪180°、艏斜浪135°、橫浪90°、艉斜浪45°和隨浪0°。試驗(yàn)采用等波高方法,所選取的規(guī)則波波高為6 cm,覆蓋的波長船長比范圍在0.25~1.5 之間。圖5 為船首視角下的試驗(yàn)照片。
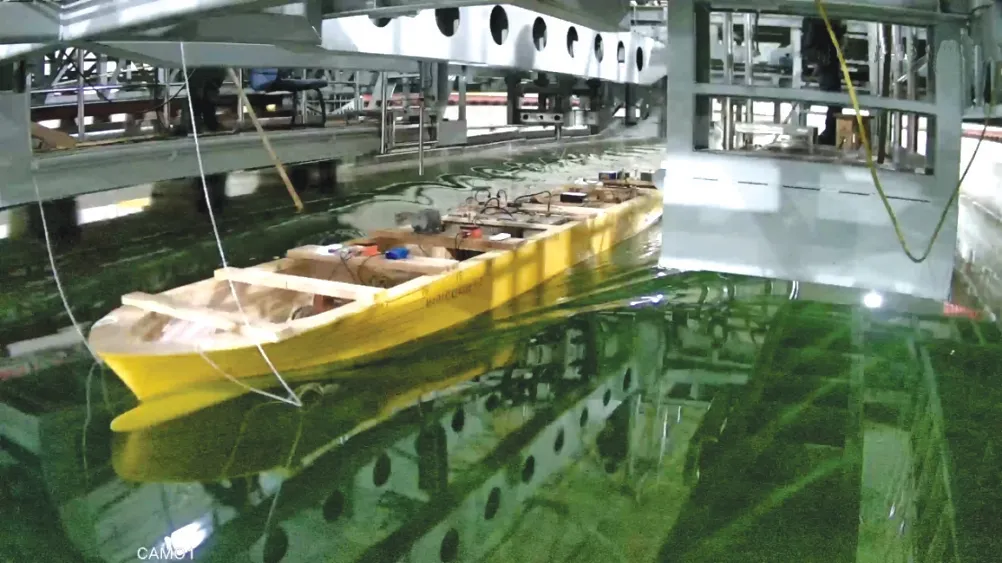
圖5 自由自航波浪增阻試驗(yàn)照片(船首視角)
3 試驗(yàn)結(jié)果及計(jì)算對比
通過試驗(yàn)獲得了目標(biāo)超大型集裝箱船在滿載狀態(tài),迎浪、艏斜浪和艉斜浪這三個(gè)不同浪向下的3 組波浪增阻響應(yīng)曲線,如圖6 -圖8 所示。圖中,橫坐標(biāo)λ/L為波長與船長之比;縱坐標(biāo)為無因次化后的波浪增阻。
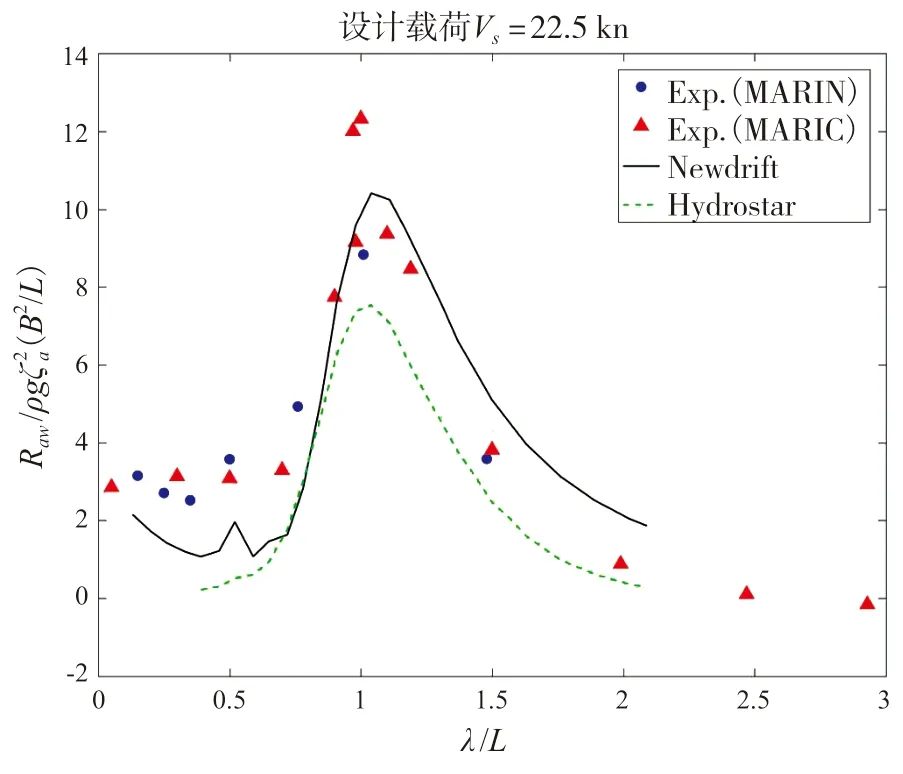
圖6 迎浪180°波浪增阻響應(yīng)試驗(yàn)結(jié)果
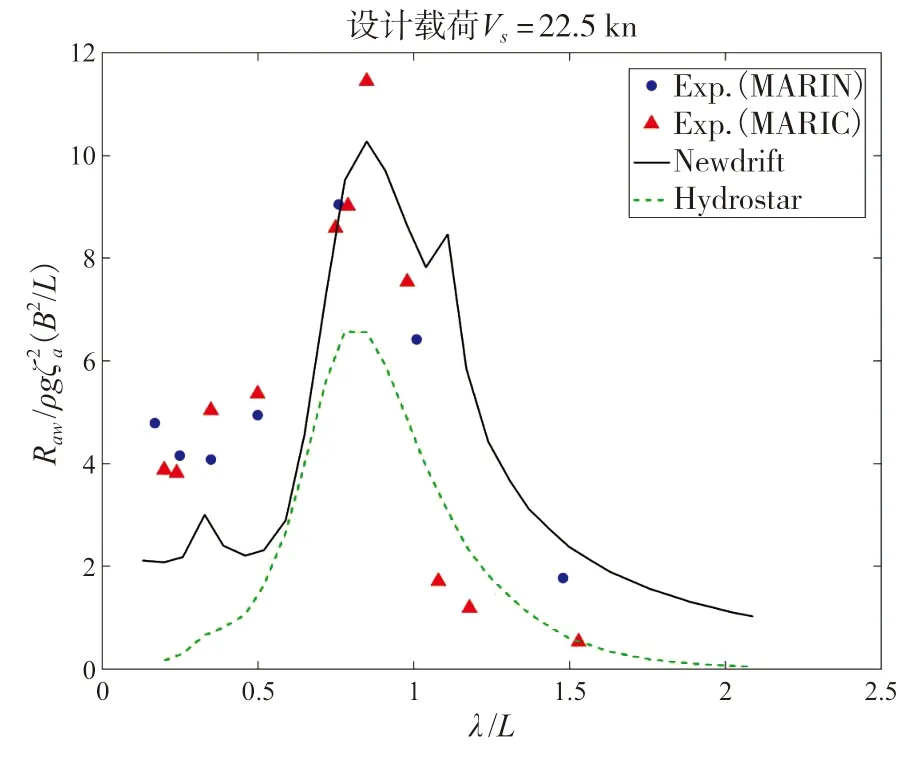
圖7 艏斜浪135°波浪增阻響應(yīng)試驗(yàn)結(jié)果
將本次試驗(yàn)的結(jié)果(Exp.MARIC)與荷蘭Marin 水池針對完全相同工況開展自由自航模型試航得到的結(jié)果(Exp.MARIN)進(jìn)行了對比;同時(shí)基于模型試驗(yàn)結(jié)果對本文所采用的數(shù)值計(jì)算方法得到的預(yù)報(bào)結(jié)果(Newdrift)及法國船級社商業(yè)軟件(Hydrostar)計(jì)算得到的結(jié)果進(jìn)行了對比。結(jié)果可以發(fā)現(xiàn):
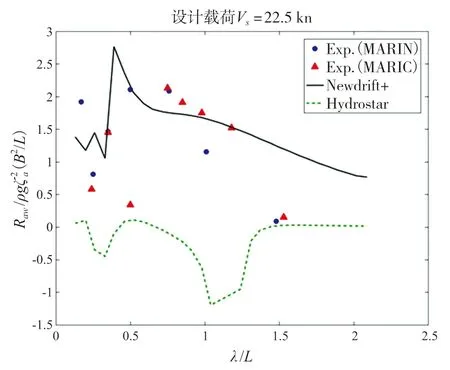
圖8 艉斜浪45°波浪增阻響應(yīng)試驗(yàn)結(jié)果
(1)本次試驗(yàn)得到的結(jié)果與荷蘭MARIN 水池的試驗(yàn)結(jié)果吻合良好,證明了本次試驗(yàn)方法的正確性和結(jié)果的可靠性;
(2)本文所采用的數(shù)值計(jì)算方法能夠較好地預(yù)報(bào)出不同浪向下的波浪增阻,數(shù)值計(jì)算結(jié)果與模型試驗(yàn)結(jié)果吻合良好,且精度優(yōu)于商業(yè)軟件;
(3)目標(biāo)超大型集裝箱船在斜浪中同樣存在波浪增阻,艏斜浪時(shí)波浪增阻量值與迎浪時(shí)相近;艉斜浪雖然數(shù)值變小,但對于實(shí)船測試航速修正能發(fā)揮一定的作用。
4 結(jié) 語
本文闡述了全浪向中波浪增阻的數(shù)值預(yù)報(bào)方法和模型試驗(yàn)技術(shù)。基于頻域勢流三維面元法和遠(yuǎn)場公式,結(jié)合短波中的經(jīng)驗(yàn)公式修正實(shí)現(xiàn)了全浪向規(guī)則波中的波浪增阻數(shù)值預(yù)報(bào)。利用基于自由自航模的全浪向波浪增阻模型試驗(yàn)方法,在拖曳水池中針對超大型集裝箱船開展模型試驗(yàn),結(jié)果表明該船在艏斜浪中的波浪增阻甚至比迎浪中更為顯著,值得更深入的理論分析和數(shù)值計(jì)算研究;另一方面,船舶在艉斜浪和隨浪中同樣可能受到波浪增阻的影響,需在進(jìn)行實(shí)船測試的航速修正時(shí)有所警覺。
最后,通過模型試驗(yàn)與數(shù)值計(jì)算結(jié)果間的對比,證明了模型試驗(yàn)結(jié)果的正確性和所建立的數(shù)值預(yù)報(bào)方法的有效性,能夠作為全浪向中波浪增阻的數(shù)值和試驗(yàn)預(yù)報(bào)手段,具有良好的應(yīng)用前景。
