彈炮結合防空武器反無人機集群作戰能力研究
2019-12-26 10:45:02楊永亮丁天寶趙軍朝余繼良
火炮發射與控制學報 2019年4期
關鍵詞:系統
楊永亮,丁天寶,趙軍朝,余繼良
(西北機電工程研究所,陜西 咸陽 712099)
近年來,隨著無人機技術的發展,小型無人機系統功能越來越復雜,成本越來越低,對于一些重要區域的安全威脅也越來越大[1]。據俄羅斯衛星通訊社莫斯科2018年1月8日電,1月6日恐怖分子利用13架無人機襲擊俄駐敘利亞基地,被俄軍安全保障系統成功制止,其中6架被俄無線電部隊控制,7架被“鎧甲”彈炮結合防空系統擊落。在今后的很長一段時間,類似的無人機“蜂群”空襲[2]事件可能會越來越多,從而給一些重要區域的防空體系帶來嚴峻的挑戰。
彈炮結合防空武器既能對付從低空和超低空突然臨空的目標,又能攻擊遠距離目標,正成為世界各國積極發展的一種高性能防空裝備[3]。該武器在陸基防空體系中主要承擔近程/末端防御任務,用于對已突破中遠程防空系統的空襲目標進行攔截打擊,是防空體系的最后一道防線。筆者針對無人機集群作戰的特點,通過建模與仿真,分析了彈炮結合防空武器的作戰能力,同時提出了相應的優化改進措施。
1 彈炮結合防空系統模型構建
1.1 基于排隊論的數學模型
排隊論是研究系統隨機聚集現象的理論[4],借助排隊論可以評估防空武器的作戰能力,判明防空武器的優缺點并擬定完善措施。
假定某陸軍防空系統編隊由s輛彈炮結合防空武器裝備組成,其戰斗任務是阻止敵空襲目標從一定方向突入防區縱深,為某重要區域提供安全保障。假設條件如下:
1)在時間TH內空襲目標以密度為λ的泊松流隨機突入防區。
防空系統與空襲兵器組成的空地對抗系統符合有限等待的排隊機制,即空襲目標隊長無限,但在防空火力覆蓋區域排隊的時間有限,超過時限未被擊落則表示突入防區。根據排隊論理論,空襲目標生滅過程的狀態轉移圖如圖1所示。
圖1中,狀態0表示火力覆蓋區沒有空襲目標,所有彈炮結合防空武器空閑;狀態1表示火力覆蓋區有1個目標,1個彈炮結合防空武器被占用;狀態s表示火力覆蓋區域有s個目標,所有s個彈炮結合防空武器被占用;狀態s+j(j=1,2,…)表示火力覆蓋區域有s個目標,所有s個彈炮結合防空武器被占用,有j個目標排隊。
設狀態0的概率為P0,狀態s的概率為Ps,狀態s+j的概率為Ps+j,令ρ=λ/μ,σ=ν/μ,那么有限等待排隊機制的防空系統狀態方程可以表示為
(1)
隨時間增長,生滅過程趨于穩定后,穩態方程為
(2)
求解方程組,可以得到
(3)
(4)
(5)
1.2 彈炮結合武器的作戰能力評估模型
彈炮結合武器由防空導彈和高炮組成[5],火力覆蓋區域示意圖如圖2所示。
空襲目標進入彈炮結合武器火力覆蓋區域后,會遭到防空導彈和高炮的雙重火力攔截,導彈與高炮共用探測系統,而火力系統相互獨立,可以將導彈射擊隊列各個狀態的概率表示為PD,0,PD,1,…,PD,s,PD,s+1,…,高炮射擊隊列各個狀態的概率表示為PG,0,PG,1,…,PG,s,PD,s+1,…,設防空導彈對空襲目標的毀殲概率為PD,HJ,高炮對空襲目標的毀殲概率為PG,HJ,那么,空襲目標被防空導彈攔截的概率為
(6)
空襲目標被高炮攔截的概率為
(7)
式中,νD,νG分別為空襲目標在導彈、高炮火力覆蓋區域的滯留參數。
空襲目標突入防區的概率為
PAN=(1-PD,X)(1-PG,X) .
(8)
防空系統的作戰能力通常用消滅敵空襲目標的數學期望來評估,設Na為時間TH內敵空襲目標數,則彈炮結合防空系統作戰能力參數Nca可以表示為
Nca=λTH(PD,X+PG,X-PD,XPG,X) .
(9)
2 反無人機集群能力仿真分析
彈炮結合防空武器系統能夠對抗武裝直升機、制導彈藥、固定翼飛機等多種類型的空襲目標,筆者主要對其攔截無人機集群的能力進行分析研究。無人機“蜂群”具有體積小、數量多、成本低、個體分散和航路不確定等特點[6],以美國海軍最近公布一款新型無人機“LOCUST”(蝗蟲)為例,其主要參數為:長度90 cm,速度110 km/h,續航時間90 min.
彈炮結合防空系統首先需要提升對小目標的探測能力,在能夠準確探測到目標的前提下,主要從以下3個方面進行仿真分析,以提高防空系統對抗無人機集群的作戰能力。
2.1 導彈及高炮射程影響分析
假設敵無人機集群數量共100架,在30 min內以泊松流隨機突入防區,彈炮結合武器分別選用5、10、15 km射程導彈攔截目標,平均射擊周期TD,SJ為60 s,毀殲概率PD,HJ為80%;假定高炮射程為4 km,平均射擊周期TG,SJ為10 s,毀殲概率PG,HJ為40%,火力覆蓋區通道數s取6,仿真結果如表1所示。
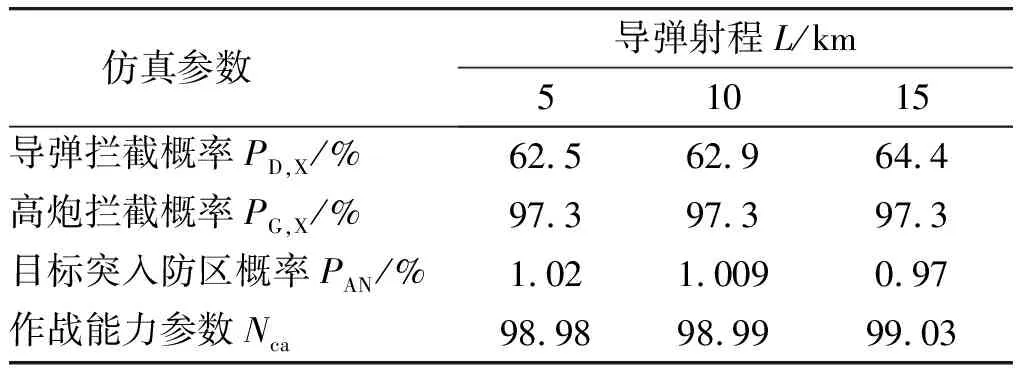
表1 導彈射程影響仿真結果
從仿真結果可以看出,隨著導彈射程增加,防空區域縱深擴大,導彈攔截概率能夠有所提高,然而明顯低于高炮攔截概率,可見對抗無人機集群目標,高炮攔截效果優于導彈。因此,實戰中可以選擇高炮為主、導彈為輔的作戰方案;在彈炮結合武器設計階段,不必追求過遠的射程,從作戰費效比、載彈量等多方面因素綜合考慮,選用射程10 km導彈與高炮的匹配性最優。
2.2 高炮毀殲概率影響分析
假設敵無人機集群數量共200架,在30 min內以泊松流隨機突入防區,彈炮結合武器配備10 km射程導彈,平均射擊周期TD,SJ為60 s,毀殲概率PD,HJ為80%;假定高炮射程為4 km,平均射擊周期TG,SJ為10 s,毀殲概率PG,HJ分別為40%,60%,80%,火力覆蓋區通道數s取6,仿真結果如表2所示。
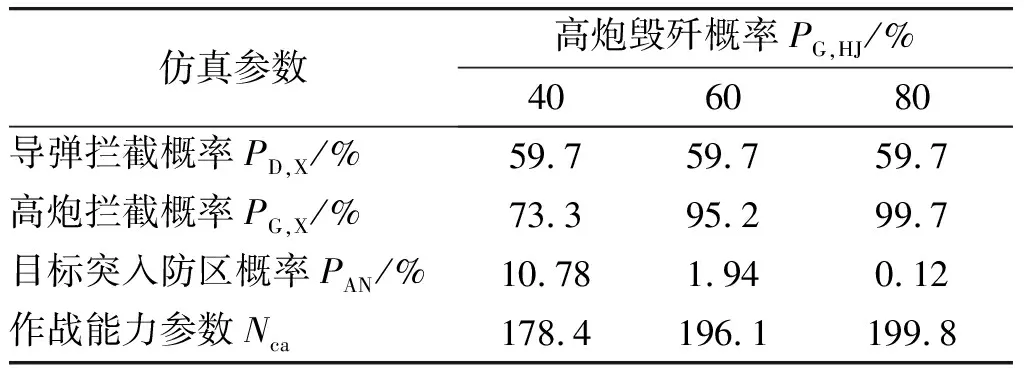
表2 毀殲概率影響仿真結果
從仿真結果可以看出,隨著高炮毀殲概率增加,攔截概率能夠明顯增大,作戰能力顯著提升。因此,提升毀殲概率是彈炮結合武器設計階段長期追求的目標,針對無人機集群目標,高炮選用預制破片彈射擊能夠明顯提升毀殲概率。另外,提升火控及隨動系統精度也可以降低系統誤差,從而提高高炮毀殲概率。
2.3 系統反應時間影響分析
假設敵無人機集群數量共200架,在30 min內以泊松流隨機突入防區,彈炮結合武器配備10 km射程導彈,毀殲概率PD,HJ為80%,平均射擊周期TD,SJ為60 s;假定高炮射程為4 km,毀殲概率PG,HJ為60%,平均射擊周期TG,SJ分別為10、8、6 s,火力覆蓋區通道數s取6,仿真結果如表3所示。
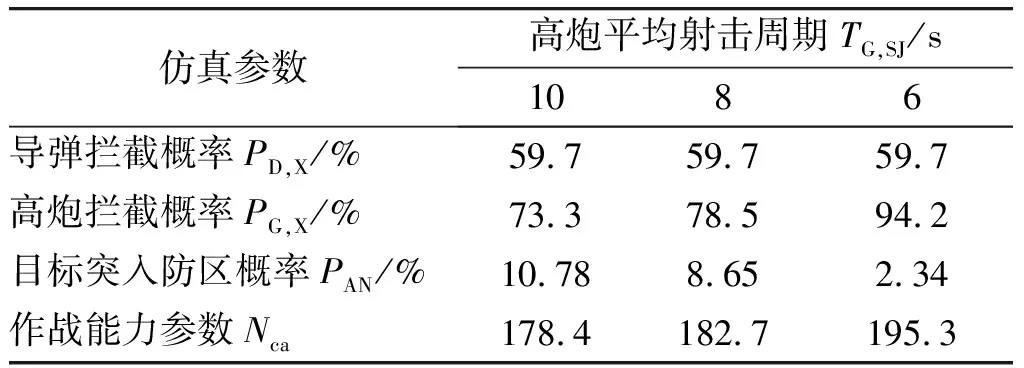
表3 高炮系統反應時間影響仿真結果
為分析防空導彈的抗飽和攻擊能力,假定高炮平均射擊周期TG,SJ為8 s,導彈平均射擊周期TD,SJ分別為60、45、30 s,其他假設條件不變,仿真結果如表4所示。
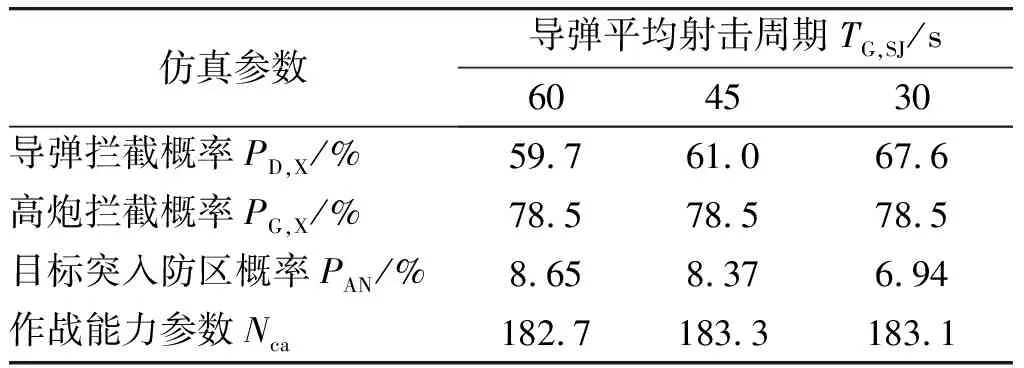
表4 導彈系統反應時間影響仿真結果
從仿真結果可以看出,通過提升高炮和導彈射擊系統自動化程度,將高炮和導彈的平均射擊周期縮短,能夠提高攔截概率,提升彈炮結合防空系統抗無人機集群飽和攻擊的作戰能力。
3 結束語
針對無人機集群作戰的主要特點,建立了基于排隊論的彈炮結合武器作戰能力評估模型,從導彈及高炮射程、高炮毀殲概率、系統反應時間3個方面,評估了彈炮結合防空武器不同的戰技指標對反無人機集群作戰能力的影響,提出了提升作戰能力改進措施,為彈炮結合武器設計階段科學分配戰技指標提供了理論支撐。
猜你喜歡
工業設計(2022年8期)2022-09-09 07:43:20
軍民兩用技術與產品(2021年10期)2021-03-16 06:05:30
北京測繪(2020年12期)2020-12-29 01:33:58
裝備制造技術(2019年12期)2019-12-25 03:06:46
制造技術與機床(2019年10期)2019-10-26 02:47:06
中國洗滌用品工業(2019年4期)2019-05-11 09:27:34
鐵道通信信號(2018年5期)2018-06-28 03:06:24
家庭影院技術(2017年9期)2017-09-26 03:41:45
知識經濟·中國直銷(2017年5期)2017-06-15 20:28:19
通信電源技術(2016年6期)2016-04-20 06:21:32
