某型高炮射擊仿真系統研究
2019-12-26 10:40:44謝奇峰
火炮發射與控制學報 2019年4期
關鍵詞:系統
謝奇峰
(中國人民解放軍95795部隊,廣西 桂林 541003)
在和平環境下,人們很難通過戰爭實踐來鑄煉軍隊,在備戰過程中不得不采用一些模型來模擬各種軍事行動,來了解和掌握軍事活動的規律。目前,很多國家的軍隊把仿真訓練作為提升戰斗力的一種重要方式,仿真訓練與實裝訓練相結合成為軍事訓練發展趨勢[1]。根據軍事活動需求和目的的不同,仿真訓練可以應用于軍事領域的各個方面,仿真訓練以其獨特的優越性在軍事訓練及軍事斗爭準備中占據著獨特的地位[2]。以往的高炮仿真訓練系統中,炮彈彈道為一直線,戰場對抗環境粗糙簡單。為了提高對空射擊訓練的真實性,提高訓練者對空中目標射擊的能力,筆者采用了一種新的對空射擊彈道仿真方法,利用三維視景仿真技術模擬高炮抗擊空中目標的作戰場景及過程,激發訓練熱情,提高訓練效果。
1 系統功能設計
系統的設計目標是采用新的彈道仿真技術和戰場仿真方法,構設出逼真的對抗性防空環境,生成高精度的實時彈道,全面檢驗參訓指揮員的指揮能力和炮手的武器操作技能。射擊仿真系統具備以下4種功能,如圖1所示。
1.1 生成地形和作戰實體
地形和作戰實體是射擊仿真的基礎。地形和作戰實體為外部加載的三維模型。在系統運行初期,從外部加載FLT格式的地形和作戰實體,構建出作戰地域的戰場環境。
1.2 生成實時空情
防空作戰訓練中缺少對抗,或對抗性不夠,將直接影響到訓練效果。射擊仿真系統根據導調傳輸過來的空情數據或者射擊仿真開始之前設定的空情參數,自動生成空情目標,在仿真環境中實時顯示空情局勢,營造出緊張激烈的對抗性防空作戰環境,必要時顯示所選批次的飛行參數。
1.3 實時彈道模擬
實時彈道模擬是射擊仿真的核心,包括射擊諸元的裝定和彈道仿真。受目標運動和地球引力的影響,火力線與瞄準線在方向和高低上存在偏差。以往的高炮仿真訓練系統略去了諸元裝定環節,火力線與瞄準線重合,炮彈軌跡為一直線,這與實際情況存在較大差別。諸元裝定的模擬考慮兩種方式:直接輸入諸元數據或者構設模擬的機械瞄準具。由于建立精確的彈道數學模型并進行解算十分困難,射擊仿真系統用擬合的彈道來模擬炮彈的運動。
1.4 彈目碰撞檢測
炮彈命中目標與否和彈目偏離大小是檢驗諸元量測、諸元裝定和射擊瞄準質量的手段。射擊仿真系統實時比較炮彈與目標的空間位置,對彈目碰撞事件進行檢測,若檢測到命中事件,及時生成目標擊中效果。
2 諸元裝定與彈道仿真
2.1 諸元裝定
射擊諸元包括目標距離、航路和航速,分別在距離裝定機構、航路航速裝定機構上進行裝定。機械瞄準具模具方式模擬效果好,但需要購置機械瞄準具,并對距離裝定機構、速度裝定機構和航路裝定機構進行角度信息采集,實現難度較大,且模具龐大的外形對射擊場景有一定程度的影響。直接輸入諸元的方式雖然與實際裝定在體感上有所不同,但是其容易構建,對射擊場景沒有影響。因此,射擊仿真系統中諸元的裝定采用第二種方式,諸元裝定面板如圖2所示。
在諸元裝定面板上,設置距離手輪,可在0~4 km范圍內裝定距離,撥動速度裝定器指針,可在0~ 300 m/s范圍內裝定速度值,撥動航路角裝定器指針,可在0~6 000范圍內裝定航路角。
2.2 彈道仿真
彈道仿真的思路是,根據對空射表數據,確定出小范圍內炮彈飛行時間曲線,解算出炮彈飛行時間曲線和目標速度直線的交點,準確獲取命中點,利用發射點、命中點、命中所需射角和方位角,用拋物線擬合出命中彈道。實際上,擬合彈道與實際彈道并不完全重合,但是當擬合彈道的初始方位角和射角與命中目標所需的火力線方位角和射角一致時,擬合彈道與實際彈道在命中點處相交,且相交時的飛行時間一致[3]。
命中點的確定是彈道仿真的重點。圖3中,正面所示坐標系為tf-s坐標系,縱坐標為彈丸飛行時間tf,橫坐標為目標航程S,坐標系零點為射擊瞬間目標所在位置m;水平面內坐標系為輔助極坐標系,陣地位置O為極點,方位角β為極角,命中點水平距離dq為極徑;α為射角。從射表中找到最靠近速度直線的3點(dq1,tf 1)、(dq2,tf 2)、(dq3,tf 3),依據拉格朗日插值法建立小范圍內炮彈飛行時間曲線。
依據炮彈飛行時間曲線和目標飛行速度直線,可以得到:
此前,過度依賴韓流文化的營銷帶動,讓韓妝在“薩德”事件時,不堪一擊。同樣的,過度依賴中國市場以及中國游客,讓韓妝在國內經濟低迷及中國業務下滑時難以維穩。
a2v2dq4+2abv2dq3+
(1)
式中:d、dj、v為已知條件;a、b、c為具有解析表達式的可求值。
高次方程沒有解析解,無法直接對其進行求解。通過建立四次方程數值算法,用算法解算出四次方程的實數根dq,從而得到命中點Q.
3 射擊場景仿真
基于Creator三維建模工具[4]和OpenGVS視景仿真開發包[5],設計并實現了對空射擊的三維視景仿真。
3.1 地形與作戰實體建模
利用Creator三維建模工具,構建好地形與作戰實體的外部模型。為提高場景仿真效果,從大比例尺地形圖上采集作戰地域的高程數據,轉換成DED格式,在Creator中將DED文件轉換成FLT格式,并添加相應的紋理和樹木,完成地形構建。依據作戰實體的外部尺寸構建出實體的三維模型。射擊仿真中,由于部分作戰實體的某些部件為運動部件,如直升飛機的螺旋槳、火炮炮管和戰車車輪等。在三維建模中,采用DOF技術,將實體上的運動部件設置成自由度結構,通過調用接口函數,可以控制運動部件在規定的角度范圍內繞坐標軸旋轉[6-7]。筆者建立了地形、直升機、轟炸機、巡航導彈、坦克和裝甲車等模型。
3.2 空情數據平滑
利用導調數據產生空情時,由于導調系統每隔1 s發送1次空情數據,空情數據不連續,仿真系統容易發生“飛行閃爍”,甚至出現“往返飛行”。為使空情目標連續平穩飛行,需處理導調系統與仿真系統之間的數據平滑問題。為此,筆者采用如下措施來實現平穩飛行。
措施一:無論空情目標當前位于何位置,仿真系統都根據新接收的目標信息重新調整目標位置,調整動作包括空間位移和姿態調整兩部分,保證仿真系統與導調系統中目標位置的一致性。
措施二:為減少仿真系統處理負荷,利用G_timer_set_frame_ period_const函數設置仿真幀數為20,保證一般情況下仿真系統能按時完成任務。
措施三:在空情數據空檔期,仿真系統根據幀時間來設置空情目標的位置,可表示為
ΔS=Δt·(v+Δv)=Δt·(2v-v′),
(2)
式中:ΔS為目標移動距離矢量;Δt為幀時間;v為目標飛行速度;Δv為速度變化值(v-v′);v′為上一次速度值。距離和速度均為三維矢量。
措施四:當仿真系統未接收到空情數據時,依最后一次接收的數據控制空情目標的飛行。
目標飛行場景如圖4所示。
圖4中,目標為直升機編隊,編隊采用一字形隊形。采取了上述措施后,仿真系統對接收到的上一數據與下一數據實現了平滑,沒有“飛行閃爍”和“往返飛行”問題。
3.3 瞄準控制
炮手瞄準射擊時的場景如圖5所示。
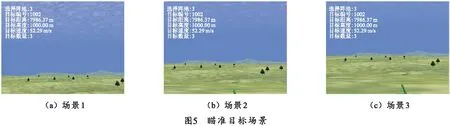
炮手通過轉動方向機和高低機搜索、瞄準目標,發射后炮彈沿著2.2節中所述的彈道飛行。在瞄準射擊場景中,炮手根據炮彈運行軌跡,估判炮彈與目標之間的實際偏差,根據偏差修正瞄準點,及時實施下一次射擊。必要時,仿真系統可給出命中目標所需修正的角度,供炮手進行參考。目標被擊中后,生成擊毀特效。
4 結束語
不同于一般的直線彈道,筆者采用擬合彈道進行射擊仿真,仿真度高,真實感強。通過建立逼真的作戰地域地形模型和作戰實體模型,采取數據平滑措施,戰場環境逼真,對抗氣氛濃厚,戰場仿真效果好。某部試用結果表明,射擊仿真系統能增強射擊訓練的對抗性,提高訓練者的積極性,有效提升訓練效果。目前,射擊仿真系統最大只能容納20批目標,下一步需改進方法,增大容量,延長射擊訓練時間。
猜你喜歡
工業設計(2022年8期)2022-09-09 07:43:20
軍民兩用技術與產品(2021年10期)2021-03-16 06:05:30
北京測繪(2020年12期)2020-12-29 01:33:58
裝備制造技術(2019年12期)2019-12-25 03:06:46
制造技術與機床(2019年10期)2019-10-26 02:47:06
中國洗滌用品工業(2019年4期)2019-05-11 09:27:34
鐵道通信信號(2018年5期)2018-06-28 03:06:24
家庭影院技術(2017年9期)2017-09-26 03:41:45
知識經濟·中國直銷(2017年5期)2017-06-15 20:28:19
通信電源技術(2016年6期)2016-04-20 06:21:32
