組合繩鋸組鋸機系統動態虛擬仿真研究
2020-01-01 01:15:40張延軍周志成王汝貴
裝備制造技術 2019年10期
方 正,張延軍,周志成,王汝貴*
(1.廣西大學機械工程學院,廣西 南寧530004;2.桂林特邦新材料有限公司,廣西 桂林541004)
0 前言
金剛石組合繩鋸組鋸機已經作為一種主要的先進石材開采工具,在石材開采和大型構筑物、建筑物、橋墩等的拆除和分解中有出色的表現,由于金剛石繩鋸開采的低成本,高效率、節水和節能等諸多優越性,使之成為新的第三代超硬材料工具[1]。但是組合繩鋸組鋸機體積大,重量大,材料、生產及運輸成本高,對金剛石組合繩鋸組鋸機進行動態性能分析已成為其工程應用中期待解決的關鍵問題,對提高組合繩鋸組鋸機產品性價比和市場競爭力也具有較重要意義。國內外相關學者對組合繩鋸組鋸機進行了研究[2-5],并在組合繩鋸組鋸機的運動學、動力學和穩定性等方面取得了一定的研究成果[6-7]。
2015年,王飛[8]等人基于多體動力學理論,建立了多排組合繩鋸組鋸機組系統的數學模型。用有限元法對組合繩鋸組鋸機進行了分析,得到了組合繩鋸組鋸機的固有頻率和振型。在此基礎上,使用ADAMS/振動分析模塊分析了位移、速度、加速度、加速度之間的關系。組合繩鋸組鋸機機關鍵部件在壓力下的加速度和頻率。確定金剛石組合繩鋸振動的感應并驗證理論的準確性多角度鋸的結構。它為結構參數的動態優化和振動固有特性的調節提供了方法和基礎,有利于提高多排組合繩鋸組鋸機鋸切石材的效率。2018年,王海波與王喆團隊[9]合作下,開展了對水下金剛石組合繩鋸組鋸機切割動力學特性研究。對繩鋸的切割系統進行了動力學分析,得到了繩鋸切割振動時的特性。通過仿真研究實驗,縱向和橫向振動在一定的情況下會發生耦合,在這種耦合的情況下,切割振動頻率接近共振頻率時,繩鋸會發生較大的共振。
雖然組合繩鋸組鋸機的研究已經取得了可喜成果,但在對組合繩鋸組鋸機整機動態性能研究方面仍有欠缺,這在某種程度上制約著組合繩鋸組鋸機在工程上的廣泛應用。本文以桂林特邦新材料有限公司的ZJP56型組合繩鋸組鋸機為研究對象,采用虛擬樣機技術及理論分析相結合手段,基于樣機物理模型實際結構、材料及驅動參數,搭建ZJP56型金剛石組合繩鋸組鋸機虛擬樣機分析模型,對其動態性能進行虛擬仿真研究,求解金剛石繩鋸的運作過程中運動學和載荷參數,并應用有限元分析方法對金剛石組合繩鋸組鋸機進行在外載荷作用下的力學分析,得到組合繩鋸組鋸機的應力分布狀況。
本研究工作流程如圖1所示。

圖1 工作流程圖
1 動力學建模
本文研究的對象是以桂林特邦新材料有限公司的ZJP56金剛石組合繩鋸組鋸機實體機器如圖2所示,運用三維建模軟件所繪制圖形如圖3所示。

圖2 金剛石組合繩鋸組合繩鋸組鋸機實體總圖

圖3 ZJP56組合繩鋸組鋸機示意圖
ZJP56金剛石組合繩鋸組鋸機工作原理:組合繩鋸組鋸機的加工過程為組合繩鋸纏繞經過主動輪、導向輪、從動輪、張緊輪再回到主動輪。調試張緊輪對組合繩鋸實時獨立張緊,啟動冷卻系統,主動輪啟動,組合繩鋸開始環繞運行,升降裝置向下作進給運動,依靠組合繩鋸的金剛石對石材進行高速磨削加工。
一個完整的復雜的機械多體系統是由多個連接的剛性或柔性元件通過力鉸鏈部件形成。由圖2和3得知組合繩鋸組鋸機的實物圖和三維圖,組合繩鋸組鋸機的正面二維圖如圖4。

圖4 組合繩鋸組鋸機二維圖
組合繩鋸組鋸機的運動是輪組系從上到下實行進給運動,兩邊的升降裝置保持平衡,輪組系依靠金剛石串珠繩鋸連接,張緊輪實時張緊,保持張力。為了更直觀地分析組合繩鋸組鋸機的力學性質,按照組合繩鋸組鋸機運動方式,簡化為簡支梁進行力學分析如圖5。

圖5 組合繩鋸組鋸機簡支梁形式
組合繩鋸組鋸機兩邊的立柱簡化為A,B兩邊,所受到的支反力為FAy,FBy,組合繩鋸組鋸機的向下進給運動,張緊輪張緊繩鋸可視作均布載荷作用。兩個升降裝置之間的位移為L,繩鋸撓度為δ。E為彈性模量,I為慣性矩。
由如下平衡方程:

得到

2 組合繩鋸組鋸機動力學仿真
虛擬樣機仿真的思路是對組合繩鋸組鋸機機構進行逆向運動分析,即通過確定升降裝置的運動規律(關于時間的函數),從而可以確定整個組合繩鋸組鋸機的運動規律,然后進行仿真運算,可求出各鉸接點的反力[10]。
組合繩鋸組鋸機的參數設定表如表1所示。

表1 組合繩鋸組鋸機屬性參數表
組合繩鋸組鋸機處于起步調試過程中時,將升降裝置的進給長度看作是隨時間(time)變化的函數:在0~120 s,組合繩鋸組鋸機的升降裝置從初始位置下降600 mm。對移動副的驅動函數用STEP函數表示:STEP(time,0,0,120,600)
建立的虛擬樣機模型如圖6、圖7、圖8所示。

圖6 ZJP56組合繩鋸組鋸機虛擬樣機圖

圖7 ZJP56組合繩鋸組鋸機虛擬樣機圖
組合繩鋸組鋸機在運行的過程中有兩部分進行運動,一個是升降裝置的升降,本次仿真是從上向下在2 min時間運動了600 mm;另一個部分的運動就是繩索系統在轉動,在升降裝置下降的過程中,繩索系統在以29.5 m/s的速度不停的轉動。
經過仿真運算后,產生的各類數據已存在虛擬樣機的數據庫里,要觀察這些數據,需要設定所需的測量,然后,在ADAMS/PostProcessor模塊里,用圖線表達這些數據。
通過圖8、圖9、圖10加工區三個方向的位移變化,組合繩鋸組鋸機在加工時由升降裝置提供垂直方向的進給運動,在Y方向的位移是從5 020 mm下降至4 420 mm,運動過程就是先緩慢加速進入工作區,進行一段近似勻速的類直線運動,然后減速之后停止加工狀態。在X方向和Z方向沒有位移發生,切割出來的石料是光滑平整。

圖8 繩鋸X方向位移圖

圖9 繩鋸Y方向位移圖
圖10 繩鋸Z方向位移圖

圖11 繩鋸X方向速度圖
通過圖10、圖11、圖12三個方向的速度圖,在X方向上和Z方向上,升降裝置由于固定受到摩擦力,沒有速度的變化。在Y方向上速度變化呈現類拋物線形式,在0~60 s,Y方向的速度以類拋物線的曲線形式先快速增長后趨于平緩到7.5 mm/s,在60~120 s,Y方向的速度以和前60 s相反類拋物線的曲線形式變化至0。說明組合繩鋸組鋸機在下降切割時,石料對串繩的阻力使得在針對加工區速度有變化。

圖12 繩鋸Y方向速度圖

圖13 繩鋸Z方向速度圖
通過圖14、圖15、圖16三個方向的加速度圖,在X方向上和Z方向上,升降裝置由于固定受到摩擦力,X和Z方向上加速度為零。Y方向的加速度先陡增至-0.25 mm/s2再以類直線加速至0.25 mm/s2。

圖14 繩鋸X方向加速度圖

圖15 繩鋸Y方向加速度圖

圖16 繩鋸Z方向加速度圖
為研究組合繩鋸組鋸機運動時所承受的載荷峰值,對升降裝置在運動過程中的力的變化進行了虛擬樣機仿真分析,得到升降裝置在X方向,Y方向以及Z方向的力的變化如圖17、圖18、圖19所示。

圖17 升降裝置運動時X方向力的變化

圖18 升降裝置運動時Y方向力的變化

圖19 升降裝置運動時Z方向力的變化
升降裝置運動時X方向力在0~30 s內以類拋物線增長,在30~90 s內以類直線形式增長,在30到120 s內以類拋物線形式趨近于臨界最大值691 800 N,Y方向力在運動初期有個突變力,以類直線形式增長至最大值為16 940 000 N,Z方向力在運動初期有個突變力,以類直線形式增長至最大值是107 100 N,為后續有限元分析提供數據支撐。
通過對組合繩鋸組鋸機的虛擬樣機的仿真分析了解到,金剛石組合繩鋸在運動過程中的移動構件在給定條件下的構件的位移變化、速度變化、加速度變化以及升降裝置在不同方向上力的變化等各項數據,了解實際運動和運動狀態過程中的一些內部的動力學數據,促進今后對金剛石組合繩鋸的各方面調整和優化等研究。
3 模型的有限元分析
為研究組合繩鋸組鋸機工作狀態中所承受的典型載荷作用下的力學變化,使用有限元分析軟件對組合繩鋸組鋸機模型在虛擬仿真中得到的外載荷作用下進行力學分析,得到組合繩鋸組鋸機整機和關鍵零部件的應力、應變、總變形量分布區域和變化,為結構安全設計提供了重要的展示作用[11-12]。有限元分析流程如圖20所示。
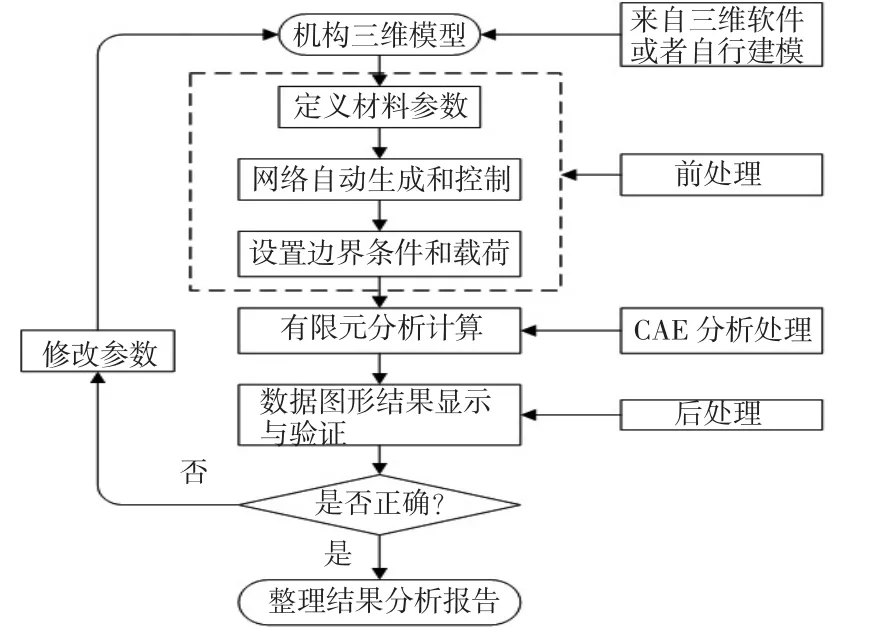
圖20 有限元分析流程
設置單元類型和材料屬性,單元類型選擇用有限元分析軟件默認的單元類型在有限元分析中進行設置,并進行網格劃分如圖21所示。

圖21 網格劃分
進行有限元分析計算后,得到在設定施加的載荷X方向力為691 800 N,Y方向力為16 940 000 N,Z方向力為107 100 N。下機構的應力圖、應變圖和變形圖,金剛石組合繩鋸組鋸機構模型工作時輪系承受向上壓力時各構件受力情況如圖22、23和24所示。

圖22 組合繩鋸組鋸機復合應力云圖
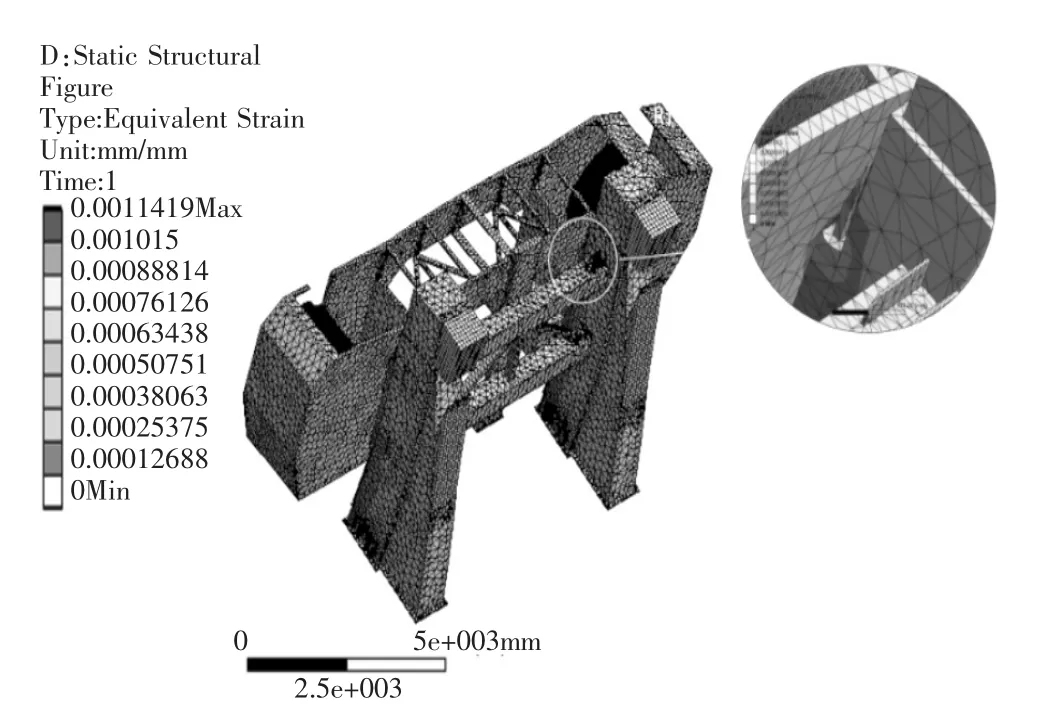
圖23 組合繩鋸組鋸機應變復合云圖

圖24 組合繩鋸組鋸機變形云圖
由應力分布圖22可知,連接部分旁的升降裝置和基座部分、基座支撐的肋板受到少許應力,應力主要集中在連接構件上,且最大的應力部分為226.89 MPa。應力集中的部分是應變集中的部分,由圖22可知,應變的分布規律和應力的分布規律基本一致,最大應變只有0.001 141 9 mm。由圖24可知,最大變形位于機構的最高水平位置處,變形最小的位于基座的固定部分,在受力時整個機構相當于一個懸臂梁的模型,底座固定部分基本不變形,而越往上變形越高,但最大變形也只有2.509 mm整個機構最大變形處基本不變形、不位移。
4 結論
ZJP56型金剛石組合繩鋸組鋸機是礦石開采領域使用的主要工具,其整機的動態性能決定著繩鋸加工精度的可靠性,本文采用虛擬樣機技術及理論分析相結合手段,基于樣機物理模型實際結構、材料及驅動參數,搭建ZJP56型金剛石組合繩鋸組鋸機虛擬樣機分析模型,對其動態性能進行虛擬仿真研究,求解金剛石繩鋸的運作過程中運動學和載荷參數,并應用有限元分析方法對金剛石組合繩鋸組鋸機進行在外載荷作用下的力學分析,得到組合繩鋸組鋸機的應力分布狀況,為組合繩鋸組鋸機的結構性能設計和安全作業工況選擇提供數據支持,提高組合繩鋸組鋸機產品穩定性和市場競爭力,使得組合繩鋸組鋸機能更廣泛地使用,提高礦石產業開采效率與經濟發展。
猜你喜歡
計算機應用(2022年2期)2022-03-01 12:33:42
計算機應用(2021年4期)2021-04-20 14:06:36
民用飛機設計與研究(2020年4期)2021-01-21 09:15:02
計算機應用(2021年1期)2021-01-21 03:22:38
電子制作(2018年18期)2018-11-14 01:48:24
山東工業技術(2016年15期)2016-12-01 05:31:22
機械工程師(2015年10期)2015-02-02 01:14:03
小天使·一年級語數英綜合(2015年2期)2015-01-14 06:35:05
機電產品開發與創新(2014年4期)2014-03-11 16:42:24
上海金屬(2013年4期)2013-12-20 07:57:18