農墾機械的智能化控制系統設計
2020-01-01 06:36:44葉洲
山東農業大學學報(自然科學版) 2019年6期
葉洲
浙江機電職業技術學院,浙江 杭州310053
在農業機械化和智能化水平不斷提高的背景下,種植農作物的各類機具也在更新換代。農墾地修整有利于更有效地種植農作物,進而提高農作物的收成和質量[1]。智能化控制既能發揮出農墾地修整機械的效率,又能使土壤的疏松和平整達到最佳狀態,因此農墾地修整機械的智能化控制系統開發成為農業現代化領域的一項重要研究課題。從國內外研究成果看,美國、加拿大、澳大利亞等國家的相關研究起步較早,在上世紀八十年代末就有相關的論述出現。國內的研究起始于二十一世紀初,大約晚了十多年。Indumathi 等對美國加利福尼亞州農作物種植的智能化控制現狀進行了調查研究,發現該州的農民在土地灌溉和修整的時候,普遍采用一種聯合型的機械,該機械由加利福尼亞大學發明并在州內推廣,由于智能化控制水平高,被農民廣泛采用[2]。Kamel 等總結了澳大利亞農業溫室種植的智能化控制現狀,提出一種新型的智能化控制方案,在計算機控制的基礎上加入物聯網技術,通過傳感器和全球定位系統使溫室土地修整達到更高的水平[3]。林力鑫探討了智能化控制系統在溫室大棚中的應用,包括土地平整、溫濕度控制、光照調節等,認為智能化控制系統能夠促進高效、高產的技術型農業生產方式[4]。本文在前人研究成果的基礎上,設計了一種農墾地修整機械的智能化控制系統,創新之處在于加入了深度控制理念,進一步發揮出自動化控制的效果。
1 農墾機械的工作原理與智能化控制系統設計
1.1 工作原理
農墾地修整機械能夠實現挖掘、碎土、平整土地等多項操作,為農民節省大量的勞動力[5]。該機械的工作原理:通過動力牽引進行農墾地的修整工作,其中刀具用于挖掘和碎土,鎮壓器用于平整土壤。在作業的過程中,最重要的是如何掌控各部件的力度和入土深度,這就需要該機械各環節的協調,使修整后的土地上虛下實,達到農墾地修整的目的。為使刀具的使用壽命得到延長,需要分析刀具的應力和位置,通過試驗進行結構優化,盡量避免應力的集中。刀具的運動軌跡如圖1 所示,修整機械的入土控制結構如圖2 所示。
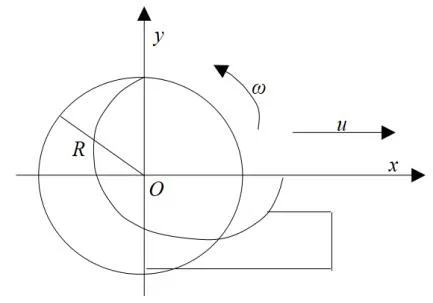
圖1 刀具的運動軌跡圖Fig.1 Tool path diagram
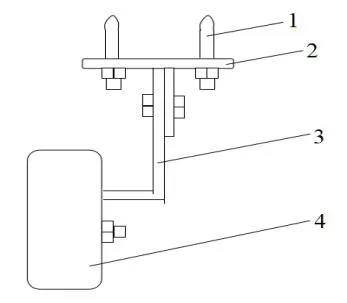
圖2 修整機械控制深度的結構圖Fig.2 Structural drawing of finishing mechanical control depth
1.2 智能化控制系統設計
按照修整機械的作業要求,需要在作業過程中進行智能化控制操作,具有自動反饋功能及相關的控制程序。智能化控制系統能夠讀取安裝在修整機械中的傳感器數據,獲取機具的位置信息及其它相關信息,在計算之后根據結果選擇控制模式,利用D/A 轉換完成程序控制并執行相應動作。本系統的整體流程圖如圖3 所示,監控人員通過上位機掌控修整機械的作業。
本系統引入了深度控制理念,即精準控制修整機械的入土深度,這是整個系統的核心所在,能夠極大地提高修整機械的智能化控制效果,使平整后的農墾地上虛下實,利于農作物生長,從而形成更強的工作效率。修整機械入土深度控制流程如圖4 所示。
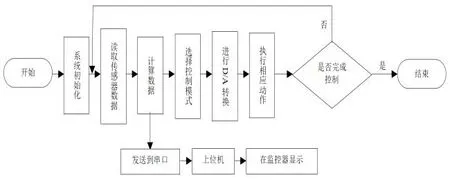
圖3 系統整體流程圖Fig.3 Overall flow chart of the system
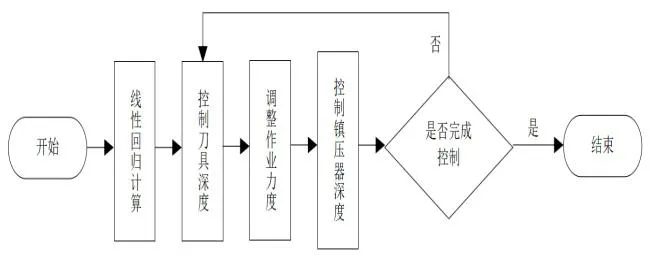
圖4 修整機械入土深度控制流程圖Fig.4 Flow chart forthe control of the depth of the trimming machine into the soil
根據相應的約束條件及線性回歸計算結果,以PID 閉環的方式進行自動調節和控制,實現精準控制修整機械入土深度的目的。在這里要考慮到修整機械的作業位置、作業力度、行進速度、偏離角度和垂直運動范圍等相關的影響因素。
2 實驗與分析
2.1 實驗條件設置
本實驗通過設計好的智能化控制系統對農墾地修整機械進行控制操作,實驗地點為農田,在相關的影響因素中選擇行進速度和偏離角度作為關鍵性因素,設定的標準數值如表1 所示。

表1 關鍵性因素的標準數值設定Table 1 Standard value setting of key factors
在實驗過程中需準確記錄實際數值,除了關鍵性因素數值之外,還有單位面積和深度的整體土量和實際碎土量,然后計算碎土率和農墾地平整度,其中平整度用標準差表示,單位為cm,要求<0.9 cm 才合格,且越小越好,而碎土率則要求>95%才合格。碎土率計算公式如下:

在上式中,GS為實際碎土量,GN為整體土量。
農墾地平整度計算公式如下:

2.2 實驗結果分析
農墾地修整機械智能化控制的主要手段是改變機械的行進速度,使修整后的碎土率和平整度符合農作物生長要求。通過數據記錄及相關計算,本實驗的最終結果如表2 所示。
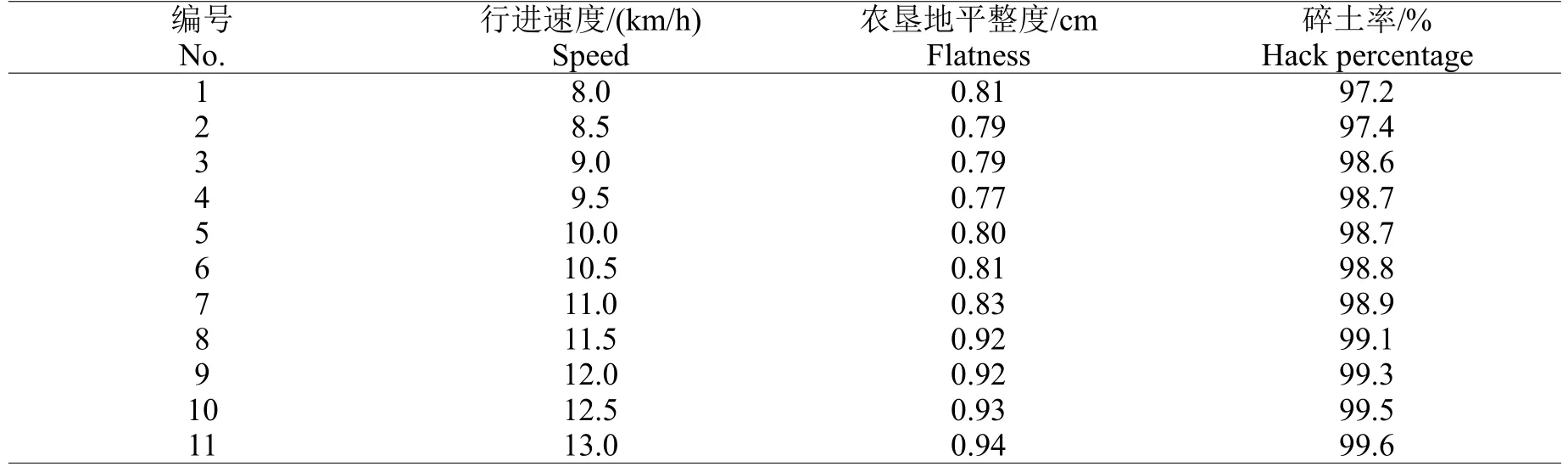
表2 實驗結果統計Table 2 Statistics of experimental results
根據實驗結果分析如下:
(1)農墾地修整機械的行進速度在8.0~11.0 km/h 之間,農墾地的平整度最高為0.83 cm,最低為0.77 cm,都在合格范圍內,而碎石率最低為97.2%,最高為98.9%,也處在合格范圍內。但是當農墾地修整機械的行進速度超過11.0 km/h,雖然碎土率更高,處于合格范圍內,但是平整度的標準差數值大幅上升,在農墾地修整機械的行進速度為11.5 km/h 時,平整度達到了0.92 cm,超出了合格范圍。且行進速度越快,平整度越高。由此可見,在確保碎土率處于合格范圍的條件下,需要對農墾地修整機械行進速度進行一定控制,合理范圍是8.0~11.0 km/h 之間。
(2)對比分析農墾地修整機械各行進速度所產生的結果,當行進速度處在9.5 km/h 的時候,農墾地平整度降到最低水平0.77 cm,且碎土率合格,說明這個行進速度可以讓農墾地平整度達到最佳。因此在系統參數設定時,盡量控制行進速度在9.5 km/h 左右。
4 結論
通過智能化控制系統實現農墾地修整機械的智能控制,能夠同時進行多項作業,包括翻地、碎土、平整等,極大地節省了勞動力,還能提高農業種植的工作效率。本文在分析農耕地修整機械工作原理的基礎上,設計了一種智能化控制系統,并引入深度控制理念,使農墾地修整機械的入土深度得到精確控制,有利于刀片、鎮壓器的入土控制,并通過傳感器得到單位面積和深度的整體土量、實際碎土量數值,方便農墾地平整度和碎石率的計算。根據實驗結果,在智能化控制系統的幫助下,可以實時調節農墾地修整機械的行進速度,當行進速度為9.5 km/h 的時候,農墾地平整度達到最佳。
猜你喜歡
軍事文摘(2022年19期)2022-10-18 02:41:14
中學生數理化·七年級數學人教版(2020年11期)2020-12-14 06:59:52
印刷工業(2020年4期)2020-10-27 02:45:52
當代工人(2020年8期)2020-05-25 09:07:38
藝術品鑒證.中國藝術金融(2018年8期)2019-01-14 01:14:28
藝術品鑒證.中國藝術金融(2018年10期)2019-01-08 02:44:26
藝術品鑒證.中國藝術金融(2018年12期)2018-08-26 06:03:48
小溪流(畫刊)(2017年12期)2018-01-10 16:07:29
中國交通信息化(2017年4期)2017-06-06 07:21:52
科技知識動漫(2016年8期)2016-07-29 20:40:09