基于模糊自整定PID的氣墊登陸艇航向控制器研究
2020-01-03 01:24:28肖劍波陸愛杰2胡大斌
計算機測量與控制 2019年12期
關(guān)鍵詞:設(shè)計
肖劍波,陸愛杰2,胡大斌
(1.海軍工程大學(xué) 艦船與海洋學(xué)院,武漢 430033; 2.中國人民解放軍91278部隊,遼寧 大連 116000)
0 引言
氣墊登陸艇具有航速快、續(xù)航力高、裝載量大、生命力強、耐波性能強等特點,具有優(yōu)良的綜合性能和一定的自我防御能力,在兩棲登陸作戰(zhàn)中具有重要的意義。但其操控設(shè)備眾多、控制系統(tǒng)復(fù)雜、航速快,對艇員操縱能力要求很高,在操縱、避碰方面的難度比普通水面艦艇大很多。且氣墊登陸艇的航行狀態(tài)較多,分為“浮態(tài)”、“氣泡狀態(tài)”、“墊態(tài)”3個,需要艇員根據(jù)不同航行條件做出判斷,并進行相應(yīng)操縱實現(xiàn)艇航行狀態(tài)轉(zhuǎn)換,要求艇員具備較高的訓(xùn)練水平和較強的應(yīng)變能力。在某些特殊環(huán)境條件下,操作不熟練甚至操作不當(dāng),則容易引起該型艇艇體的高速回轉(zhuǎn)與側(cè)滑,最終可能導(dǎo)致埋艏、甩尾、翻船等重大事故[1]。因此,需對氣墊登陸艇操縱控制規(guī)律開展自動控制算法研究。
船舶航向控制基本方法有PID控制、滑模控制、模糊控制等,其中基于滑模控制方法衍生出來的有積分滑模控制、終端滑模控制、非奇異終端滑模控制等[2-4],這類方法控制效果平滑、速度快、不容易出現(xiàn)抖振,但是依據(jù)這類方法設(shè)計控制器一般都需要根據(jù)被控對象的數(shù)學(xué)模型對控制器的進行設(shè)計,其算法會涉及對象模型中的部分參數(shù)和表達(dá)式,如果模型不精確,則控制效果將難以保證。
氣墊登陸艇運動涉及多種外力和外力矩,且控制氣墊艇回轉(zhuǎn)、轉(zhuǎn)向、航行的操縱方式相比于常規(guī)船舶更加復(fù)雜,有空氣舵、空氣槳、側(cè)風(fēng)門等多種操縱方式。參數(shù)眾多,無法獲取準(zhǔn)確的模型[5-6]。因此,本文結(jié)合傳統(tǒng)PID控制方法和模糊控制的相關(guān)理論進行航向控制器設(shè)計。同時,考慮到氣墊艇實際海上航行過程中,航向的一般通過舵來操控,側(cè)風(fēng)門、螺旋槳螺距一般較少使用,故選擇空氣舵操縱面對航向控制器進行研究。
1 PID航向控制器的設(shè)計
在傳統(tǒng)PID控制方法中,比例P用來快速調(diào)節(jié)系統(tǒng)偏差,積分I用來消除穩(wěn)態(tài)誤差,微分D加快調(diào)節(jié)速度,防止系統(tǒng)抖振。在氣墊艇航向的自動控制中,由于氣墊艇受風(fēng)的影響非常大,尤其是在大側(cè)風(fēng)的情況下,PID控制中的積分環(huán)節(jié)和微分環(huán)節(jié)是必不可少的。本文設(shè)計的PID航向控制器的原理如圖1所示,r(t)為設(shè)定航向,y(t)為實際航向。因為僅對航行控制進行研究,采用氣墊登陸艇三自由度運動模型。
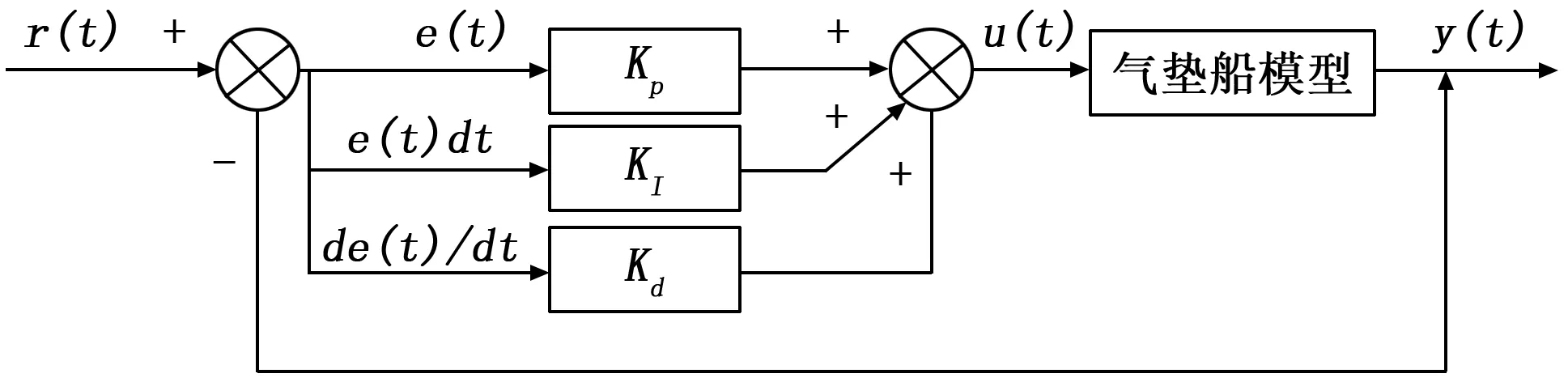
圖1 PID航向控制器原理圖
PID航向控制器是一種線性控制器,根據(jù)設(shè)定航向與氣墊艇實際航向構(gòu)成的控制偏差:
e(t)=r(t)-y(t)
(1)
其控制規(guī)律的微分方程為:
(2)
寫成傳遞函數(shù)形式為:
(3)
式中,Kp為比例系數(shù),Kd為微分系數(shù),且Kd的值為Kp和TD(微分時間常數(shù))的乘積。PID各環(huán)節(jié)作用如下:
比例單元Kp實時成比例地反應(yīng)氣墊艇航向偏差e(t),偏差一旦產(chǎn)生,調(diào)節(jié)器立即產(chǎn)生作用以減小航向偏差;積分單元Ki主要作用是消除航向的穩(wěn)態(tài)誤差,即保證氣墊艇最終不會偏離設(shè)定航向,積分系數(shù)Ki越小,對應(yīng)的積分時間常數(shù)越大,積分作用越強;微分單元Kd能成比例的反應(yīng)航向偏差的變化率,并能在航向偏差變得太大之前,在航向控制系統(tǒng)中引入一個有效的早期修正信號,從而加快系統(tǒng)調(diào)節(jié)速度。
2 模糊自整定PID航向控制器的設(shè)計
2.1 控制器結(jié)構(gòu)
模糊PID控制器的原理框圖如圖2所示,r(t)為設(shè)定航向,y(t)為實際航向。該控制器的核心在于設(shè)計模糊自整定算法(以下簡稱模糊整定器)來動態(tài)調(diào)整PID控制器的比例、積分和微分參數(shù)。
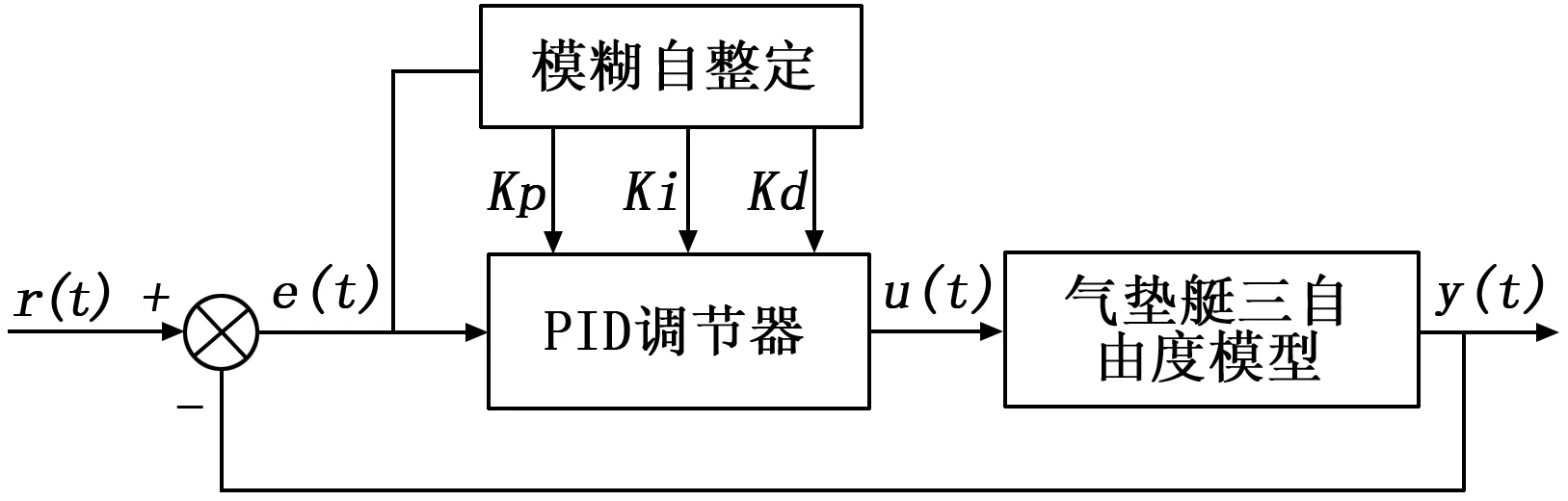
圖2 模糊自整定PID控制器原理圖
本文設(shè)計的參數(shù)模糊整定器(圖3)是一個兩輸入兩輸出的結(jié)構(gòu)。其中:e和ec(輸入)是航向偏差和航向偏差變化率;ΔKp和ΔKd(輸出)分別是PD控制器的比例、微分參數(shù)的調(diào)節(jié)量;E、EC和ΔKp、ΔKI、ΔKD分別為航向偏差與偏差變化率和比例、微分參數(shù)調(diào)節(jié)量的語言變量;Ke、Kec為輸入量化因子;KKp、KKi、KKd為輸出量化因子。
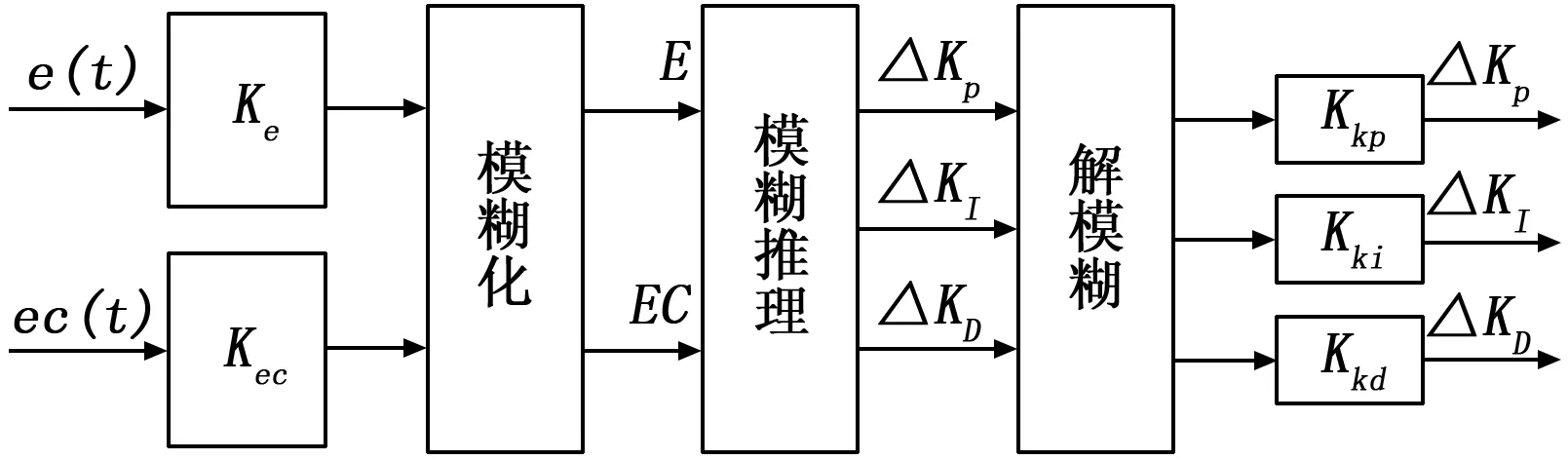
圖3 模糊自整定算法結(jié)構(gòu)圖
航向控制器PID參數(shù)的模糊自整定過程就是在氣墊船運動過程不斷測量e和ec,根據(jù)相應(yīng)的模糊關(guān)系,應(yīng)用設(shè)計好的模糊控制器實時調(diào)整PID參數(shù),以滿足e和ec對PID控制參數(shù)的動態(tài)要求,從而加快控制器的調(diào)節(jié)速度,提高控制系統(tǒng)動、靜態(tài)性能。
2.2 參數(shù)模糊整定器的設(shè)計
2.2.1 隸屬度函數(shù)的建立
如圖3所示,參數(shù)模糊整定器采用兩輸入三輸出的結(jié)構(gòu)形式,輸入為偏差e和偏差變化率ec,輸出為比例參數(shù)調(diào)節(jié)量ΔKp、積分參數(shù)調(diào)節(jié)量ΔKi和微分參數(shù)調(diào)節(jié)量ΔKd。E和EC分別為輸入量e和ec的語言變量,ΔKp、ΔKI和ΔKD分別為輸出量ΔKp、ΔKi和ΔKd的語言變量。E、EC、ΔKp、ΔKI和ΔKD的語言取值均為“正大”(PB)、“正中”(PM)、“正小”(PS)、“零”(ZO)、“負(fù)小”(NS)、“負(fù)中”(NM)、“負(fù)大”(NB)[7-8],對應(yīng)論域為{-3,-2,-1,0,1,2,3}。
在Matlab命令行窗口中輸入fuzzy,回車進入模糊邏輯編輯工具箱。借助該工具箱建立E、EC、ΔKp、ΔKI和ΔKD的隸屬度函數(shù),NB為Z型隸屬度函數(shù),PB為S型隸屬度函數(shù),其他均選擇高斯函數(shù),分別如圖4、5所示。
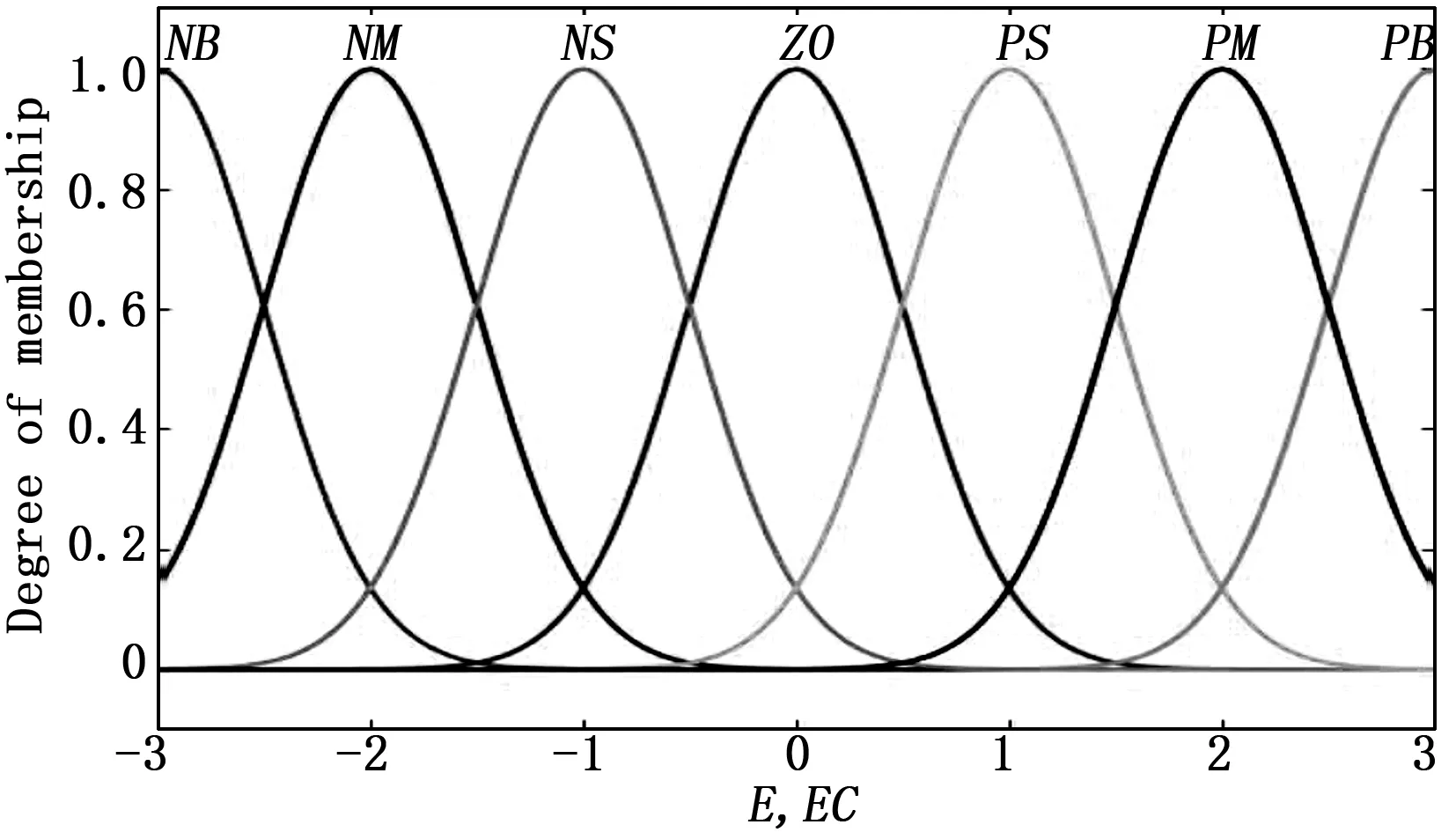
圖4 E、EC的隸屬度函數(shù)曲線
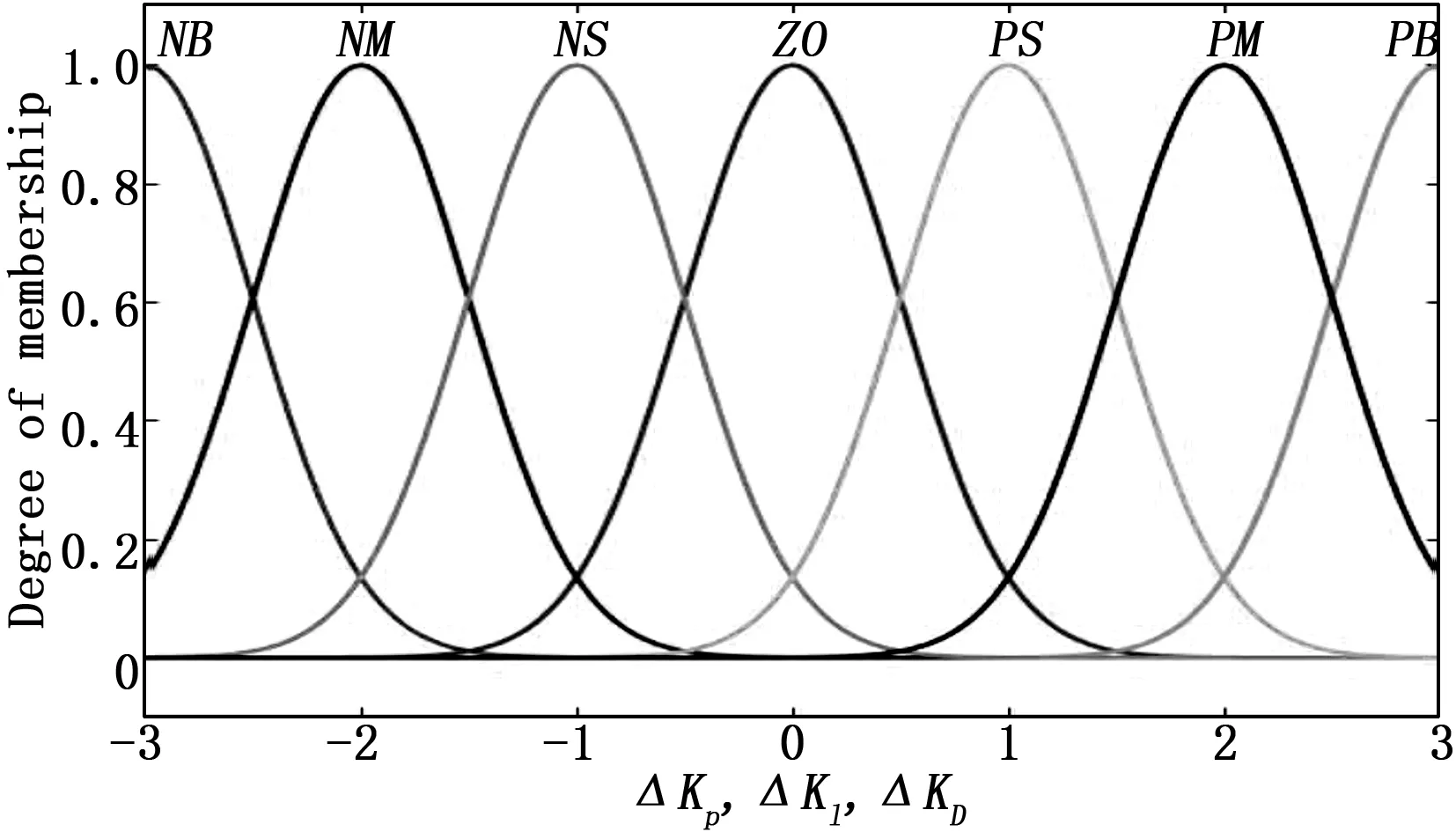
圖5 ΔKp、ΔKI和ΔKD的隸屬度函數(shù)曲線
2.2.2 模糊控制規(guī)則
PID參數(shù)的整定必須考慮不同時刻這兩個參數(shù)的不同作用以及兩者的互聯(lián)關(guān)系[8],因此,根據(jù)前述比例、積分、微分參數(shù)Kp、Ki、Kd在控制系統(tǒng)的調(diào)節(jié)作用,結(jié)合相關(guān)實踐經(jīng)驗,得出在不同偏差e和偏差變化率ec時的Kp、Ki、Kd的調(diào)整原則。
1)當(dāng)偏差的絕對值|e|很大時,為了提高響應(yīng)速度,不論偏差的變化率為何值,都應(yīng)優(yōu)先考慮讓控制器按最大值輸出,以最大速度調(diào)整誤差,從而使|e|迅速減小。同時系統(tǒng)響應(yīng)瞬間ec很大,故Kd的值應(yīng)該減小,同時,應(yīng)對積分作用加以限制。
2)當(dāng)偏差的絕對值|e|處于中等大小時,為了降低控制系統(tǒng)的超調(diào),Kp應(yīng)取值應(yīng)當(dāng)減小一些,但是也不能過小,減慢系統(tǒng)的相應(yīng)速度。
3)當(dāng)偏差的絕對值|e|很小,系統(tǒng)輸出值接近設(shè)定值時,應(yīng)當(dāng)增大Kd的值,減小Ki的值,而當(dāng)|ec|較小時,可取相對大一些的Kd,當(dāng)|ec|較大時取較小一些的Kd。
根據(jù)上述PID參數(shù)調(diào)整原則,得到了ΔKp、ΔKI和ΔKD三個參數(shù)模糊控制規(guī)則表。如表1、2、3所示。
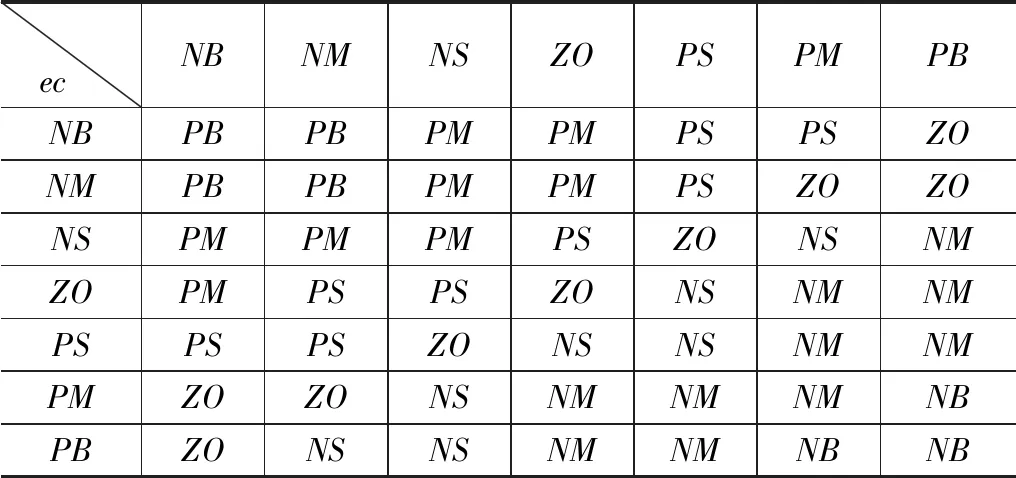
表1 ΔKp模糊控制規(guī)則表
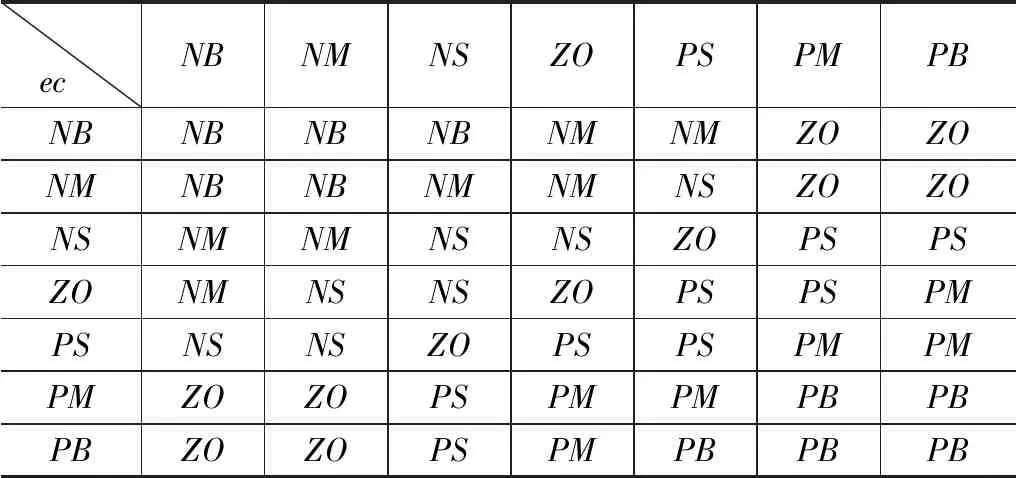
表2 ΔKI模糊控制規(guī)則表
2.2.3 去模糊化
按照模糊控制規(guī)則表得到的結(jié)果是一個模糊向量,要用作控制量還需將去模糊化。本章采用重心法去模糊化來得到,該方法實際上是工業(yè)控制中廣泛使用的加權(quán)平均法的一種特殊情況[9-11]。
其計算方法如下:
(4)
本節(jié)使用Matlab模糊邏輯工具建立了隸屬度函數(shù),模糊控制規(guī)則,選擇了重心法解模糊,最后得到了模糊整定器輸入與輸出的關(guān)系圖像。圖6為ΔKp與E和EC的關(guān)系圖,圖7為ΔKI與E和EC的關(guān)系圖,圖8為ΔKD與E和EC的關(guān)系圖。
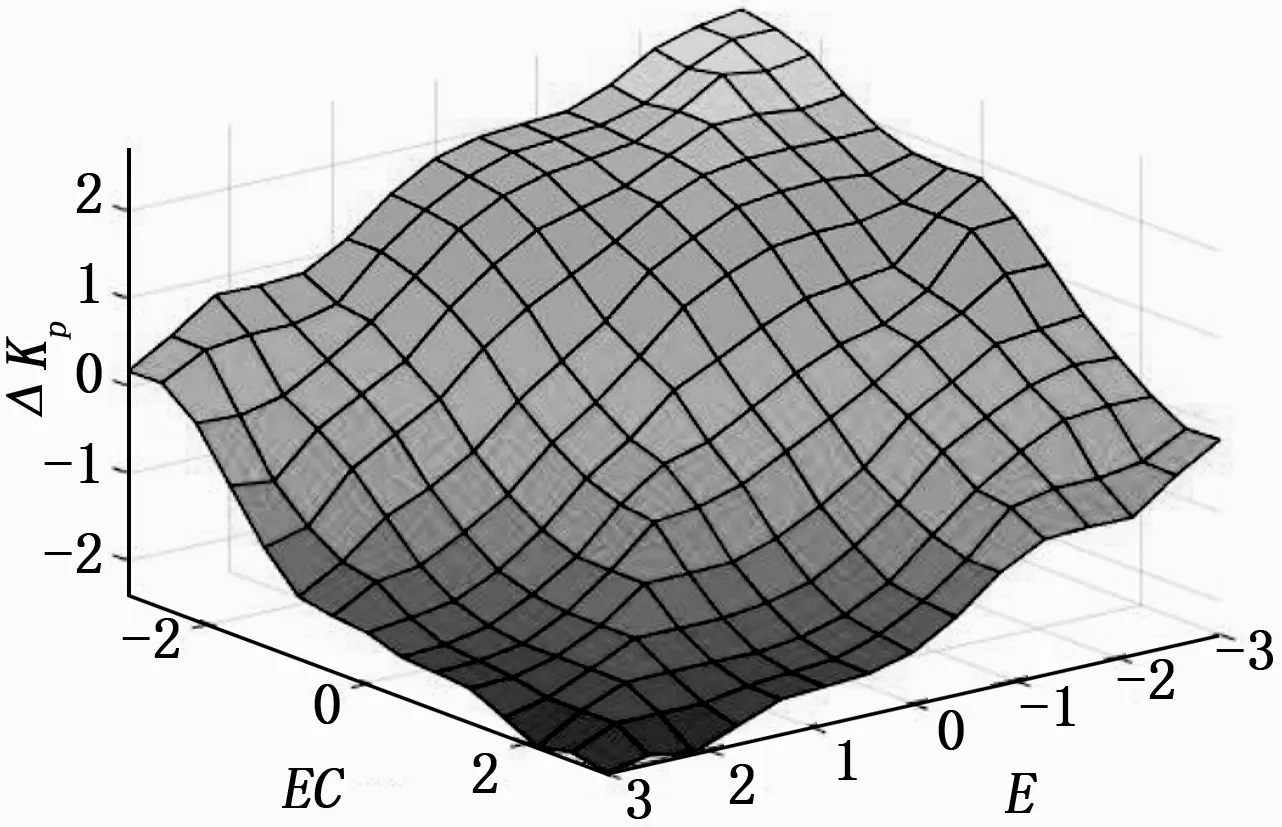
圖6 ΔKp與E和EC的關(guān)系圖
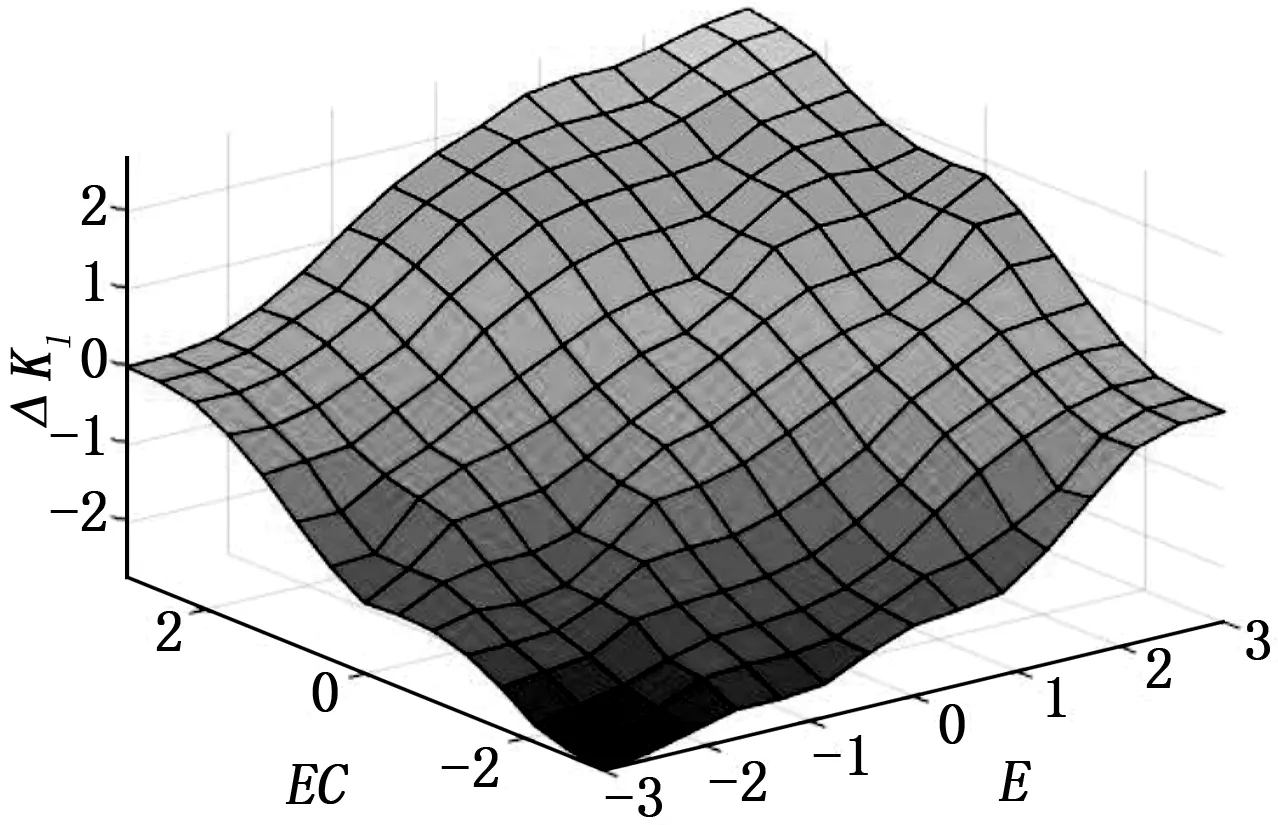
圖7 ΔKI與E和EC的關(guān)系圖
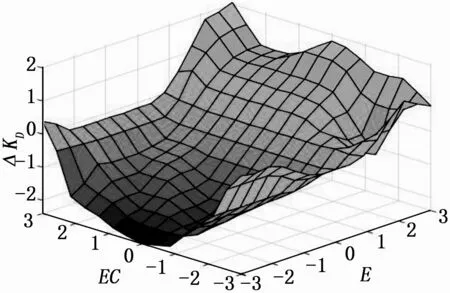
圖8 ΔKD與E和EC的關(guān)系圖
3 氣墊艇航向控制器仿真試驗
根據(jù)上節(jié)設(shè)計的模糊自整定PID航向控制器,經(jīng)多重調(diào)試,輸入量化因子取Ke取值為0.05,Kec取值為0.0001;輸出量化因子Kkp取值為3,Kki取值為0.001,Kkd取值為20。同時必須注意的是,控制器的輸出必須加以限值,范圍為-30~30,即舵角滿舵的范圍。仿真過程中氣墊船初始航向為0°(正北方向),設(shè)定航向為30°,氣墊艇初始航速為30節(jié),運動過程中保持螺旋槳轉(zhuǎn)速不變,外界條件為無風(fēng)。試驗中比例參數(shù)Kp的值為8,積分參數(shù)Ki取0.025,微分參數(shù)Kd的值為80,先進行PID控制器航向控制的試驗,然后保持Kp、Ki和Kd的不變,使用模糊整定器在氣墊船航行過程中動態(tài)調(diào)節(jié)Kp、Ki和Kd兩個參數(shù),試驗結(jié)果如圖9所示。
從圖9中可知,加入了模糊自整定調(diào)節(jié)器的PID控制器對航向的控制變得十分平滑,航向控制過程中沒有振蕩,沒有超調(diào),速度也有所加快,說明設(shè)計的模糊整定器是十分有效的。
為了進一步檢驗航向控制器性能,設(shè)置有風(fēng)條件,風(fēng)向20°,風(fēng)速10 m/s。其余設(shè)定參數(shù)都不變。仿真結(jié)果如圖10所示。
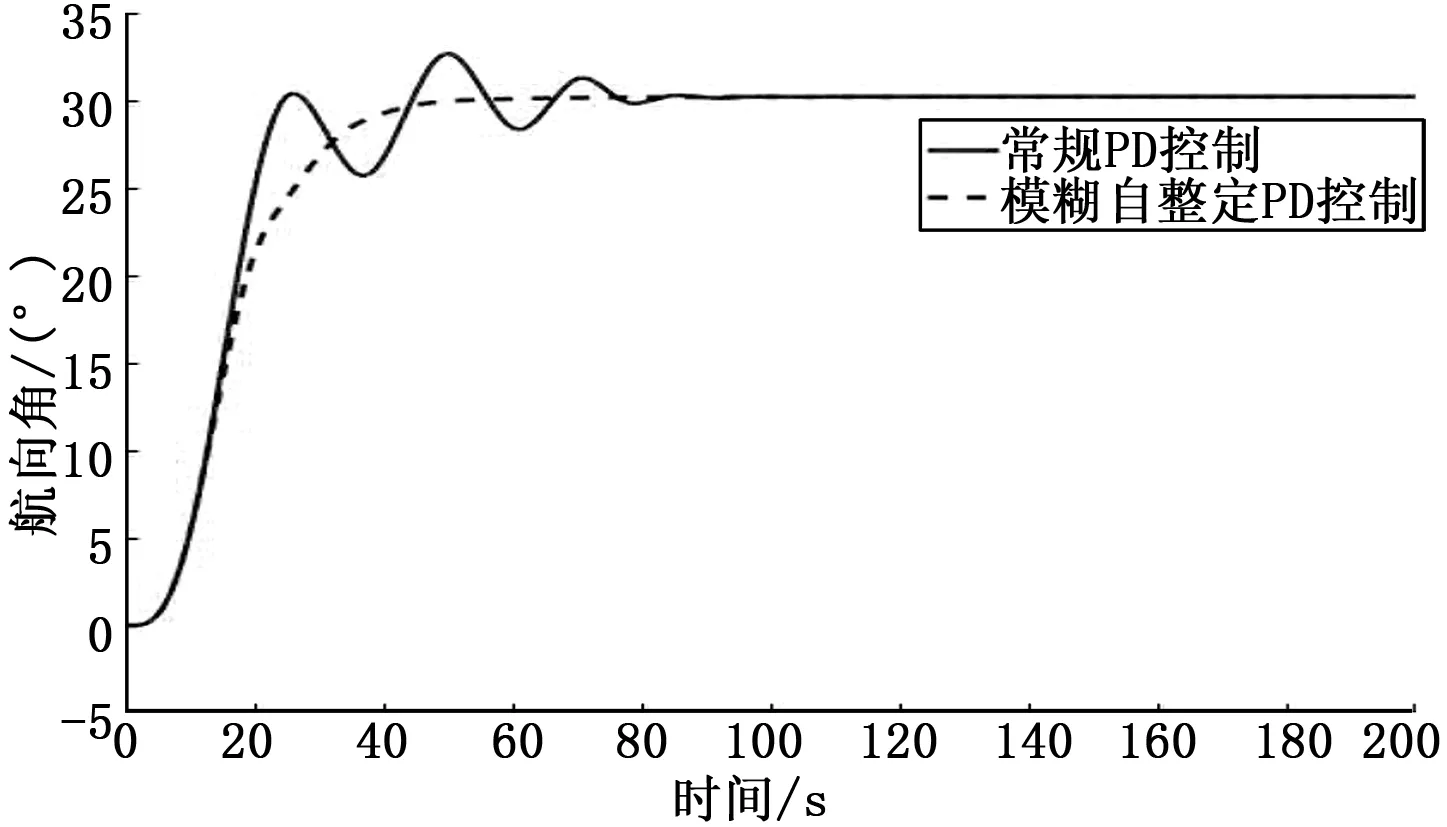
圖10 20° 10 m/s風(fēng)速下航向變化曲線
對比圖9和圖10可以看出PID控制器受到風(fēng)速的影響比較大,相比之下,模糊自整定PD控制器對風(fēng)有較好的抗干擾性,控制器的魯棒性較強。
綜上所述,在無風(fēng)和小角度風(fēng)的條件下,設(shè)計的模糊自整定航向控制器具有良好的動態(tài)性能、穩(wěn)態(tài)性能和較強的魯棒性。
在氣墊船航向控制中,受風(fēng)速和風(fēng)向的影響是非常大的,為了保證該模糊自整定PID航向的可靠性,設(shè)置大側(cè)風(fēng)條件,風(fēng)向90°,風(fēng)速10 m/s,即從氣墊船側(cè)面吹來的強風(fēng)。其余設(shè)定參數(shù)都不變,仿真結(jié)果如圖11所示。
從圖中可以看出,大側(cè)風(fēng)的情況下,常規(guī)PID的航向控制曲線會有抖動,而模糊自整定PID航向控制曲線十分平滑,控制速度更快,可以看出,在大側(cè)風(fēng)情況下模糊自整定PID控制器也具有良好的動態(tài)性能、穩(wěn)態(tài)性能和較強的魯棒性。
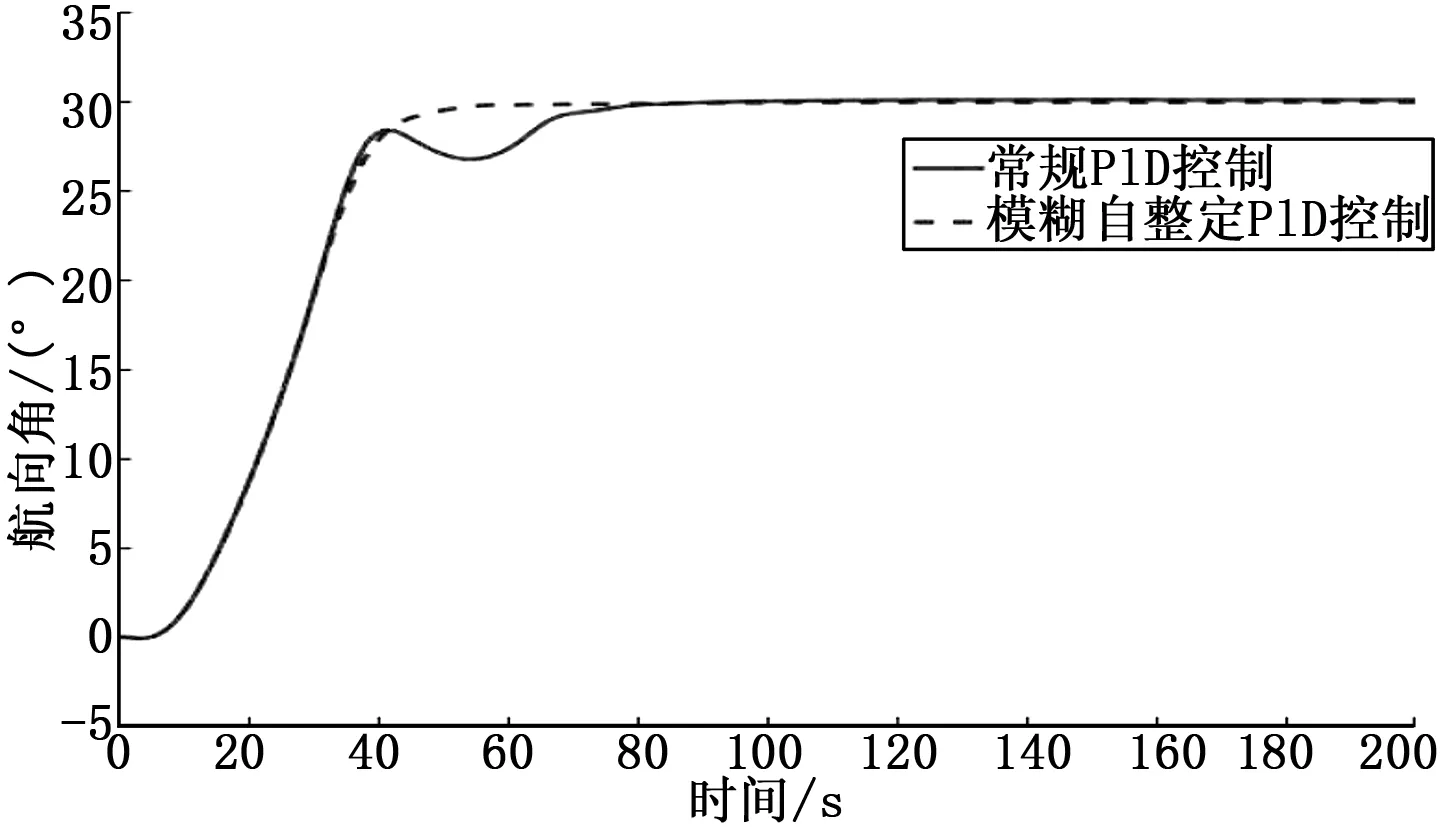
圖11 90° 10 m/s風(fēng)速下航向變化曲線
4 結(jié)論
本文基于空氣舵操縱面開展了氣墊艇航向控制研究,分析了PID航向控制器的原理,重點研究了模糊自整定PID參數(shù)的航向控制器,分析了該控制器的結(jié)構(gòu)和控制流程,闡述了PID參數(shù)模糊整定器設(shè)計方法和步驟,建立了E、EC、ΔKP、ΔKI和ΔKD五個語言變量的隸屬度函數(shù),根據(jù)基本理論和實踐經(jīng)驗設(shè)計了模糊整定器的模糊規(guī)則,說明了解模糊的方法——重心法,得出了ΔKP、ΔKI、ΔKD與E和EC的關(guān)系。通過仿真試驗,在相同條件下比較了PID控制器和模糊自整定PID控制器的控制性能,試驗結(jié)果表明模糊整定器能夠使航向控制變得更加平滑、無超調(diào),使控制器調(diào)節(jié)時間縮短,系統(tǒng)魯棒性加強,動態(tài)、靜態(tài)性能更好。
為簡化算法,本文僅通過三自由模型對氣墊艇航向控制進行了研究,三自由度模型只能有效反映氣墊艇在中低航速以及中等強度操縱以下的運動情況,后續(xù)應(yīng)建立4個乃至6個自由度的運動模型,且解決相應(yīng)模型的解算方法問題,力求速度快、精度高。在控制輸入方面,也僅僅考慮了空氣舵操縱面,后續(xù)將引入側(cè)風(fēng)門、螺距等多個控制量,并考慮其相互耦合關(guān)系,從而實現(xiàn)更為準(zhǔn)確地運動控制建模,以滿足氣墊艇操縱控制需求。
猜你喜歡
河北畫報(2020年8期)2020-10-27 02:54:06
現(xiàn)代裝飾(2020年7期)2020-07-27 01:27:42
流行色(2020年1期)2020-04-28 11:16:38
電子制作(2019年19期)2019-11-23 08:41:36
電子制作(2019年15期)2019-08-27 01:11:50
電子制作(2019年7期)2019-04-25 13:18:16
藝術(shù)啟蒙(2018年7期)2018-08-23 09:14:18
海峽姐妹(2017年7期)2017-07-31 19:08:17
Coco薇(2017年5期)2017-06-05 08:53:16
商周刊(2017年26期)2017-04-25 08:13:04