基于天空基協(xié)同的海上目標(biāo)任務(wù)規(guī)劃應(yīng)用
2020-01-05 05:37:53李明馬明杰金明磊
計算技術(shù)與自動化 2020年4期
關(guān)鍵詞:無人機(jī)
李明 馬明杰 金明磊
摘? ?要:隨著人類對海洋的進(jìn)一步探索,海洋在國家發(fā)展中占據(jù)了越來越重要的地位,如何綜合應(yīng)用天空基獲取海洋信息,實現(xiàn)多基協(xié)同完成海上目標(biāo)任務(wù),變得尤為重要。本系統(tǒng)主要將天基與空基相結(jié)合,實現(xiàn)天空一體化海洋遙感資源任務(wù)規(guī)劃,用以完成海上廣域目標(biāo)和移動目標(biāo)的識別和監(jiān)測。經(jīng)過仿真實驗,完成了天空基協(xié)同海上目標(biāo)任務(wù)規(guī)劃,實現(xiàn)了多源遙感融合。
關(guān)鍵詞:多基協(xié)同;無人機(jī);衛(wèi)星;任務(wù)規(guī)劃;任務(wù)分配;
中圖分類號:E91? ? ? ? ? ? ? ? ? ? ? ? ? ? ? ? ? ? ? ? ? ? ? 文獻(xiàn)標(biāo)識碼:A
Application of Maritime Target Mission Planning Based
on Sky-based Collaboration
LI Ming1,MA Ming-jie2 ,JING Ming-lei1
( 1. Aerospace Star Technology Co.,Ltd.,Beijing 100086,China;
2. School of Electrical Automation and Information Engineering,Tianjin University,Tianjin 300072,China)
Abstract:With the further exploration of the ocean by human beings,the ocean has occupied an increasingly important position in the development of the country. How to comprehensively apply the sky-based means to obtain marine information and realize multi-base collaborative accomplishment of the maritime target mission has become particularly important. The system mainly combines space-based and space-based,and realizes the task planning of sky integrated ocean remote sensing resources to complete the identification and monitoring of maritime wide-area targets and moving targets. After the simulation experiment,the sky-based collaborative maritime target mission planning is completed,and multi-source remote sensing fusion is realized.
Key words:multi-base coordination;drone;satellite;mission planning;task assignment
近年來,隨著“建設(shè)海洋強(qiáng)國”戰(zhàn)略的推進(jìn)明確從海洋資源開發(fā)、海洋科技創(chuàng)新、海洋生態(tài)文明建設(shè)、海洋權(quán)益維護(hù)等方面助力建設(shè)海洋強(qiáng)國的路線方針,堅定走認(rèn)知海洋、經(jīng)略海洋、管控海洋之路。我們正式走入海洋,開發(fā)海洋,維護(hù)國家海洋權(quán)益,但是我們對海洋的監(jiān)控能力還遠(yuǎn)遠(yuǎn)不足。海洋監(jiān)測主要存在過程中還存在不足,海洋多源信息融合能力不夠,無法精確及時的獲取目標(biāo)信息。海洋多源信息獲取途徑少。海洋多源信息整合能力差。我國雖然在天基,空基投入了很多,建設(shè)無人機(jī)基地,建設(shè)衛(wèi)星體系。但是多基協(xié)同和數(shù)據(jù)融合方面,并未形成成熟的技術(shù)體系,無法滿足現(xiàn)階段海上目標(biāo)任務(wù)的業(yè)務(wù)需求。海洋環(huán)境復(fù)雜,海域監(jiān)測任務(wù)不確定性極大,天氣,地理位置,政治原因都會影響監(jiān)測任務(wù)。通過單一的遙感監(jiān)測手段遠(yuǎn)遠(yuǎn)無法滿足任務(wù)需要。天基可以實現(xiàn)大面積影響可以用于廣域目標(biāo)監(jiān)測,空基靈活性極高可用于移動目標(biāo)追蹤,兩者結(jié)合實現(xiàn)天空基協(xié)同,優(yōu)勢互補(bǔ),可以實現(xiàn)對海上目標(biāo)的多方位全面監(jiān)控,實現(xiàn)我國對海洋的全覆蓋,高精度,全方位掌控。已經(jīng)有諸多國家提出對海洋的監(jiān)控體系,日本提出了“海洋監(jiān)視體制”,結(jié)合無人機(jī)與衛(wèi)星,監(jiān)控海洋[1]。我國也有諸多多基協(xié)同的研究成果,張拯寧等提出的天空地海多基協(xié)同多源融合的海洋應(yīng)用設(shè)想。主要以海上目標(biāo)的無人機(jī)和衛(wèi)星任務(wù)規(guī)劃研究為中心,實現(xiàn)任務(wù)分配,任務(wù)規(guī)劃,無人機(jī)路徑規(guī)劃,衛(wèi)星規(guī)劃結(jié)果優(yōu)化,實現(xiàn)天空基協(xié)同任務(wù)規(guī)劃,完成多源遙感融合。
1? ?無人機(jī)任務(wù)規(guī)劃
無人機(jī)任務(wù)規(guī)劃根據(jù)給定的海上目標(biāo)信息,綜合現(xiàn)有設(shè)備信息以及環(huán)境天氣等因素,規(guī)劃出任務(wù)執(zhí)行過程,任務(wù)分配以及任務(wù)路徑等。任務(wù)的分配和路徑規(guī)劃在任務(wù)規(guī)劃中尤為重要。無人機(jī)的任務(wù)分配問題,應(yīng)該在滿足環(huán)境要求與任務(wù)要求的前提下,合理的分配任務(wù)給無人機(jī)。無人機(jī)的路徑規(guī)劃問題[2],實際上是一個多約束條件數(shù)學(xué)優(yōu)化問題,根據(jù)目標(biāo)任務(wù)要求、禁飛區(qū)、燃料限制風(fēng)力等級等約束條件,規(guī)劃出一條安全等級高,可行性好的路徑。
1.1? ?無人機(jī)任務(wù)分配
1.1.1? ?問題描述
任務(wù)分配需要充分考慮,任務(wù)要求,目標(biāo)環(huán)境,為任務(wù)分配合適的無人機(jī),以用于目標(biāo)區(qū)域的監(jiān)測或目標(biāo)追蹤[3]。本系統(tǒng)研究單任務(wù)的無人機(jī)分配問題,為單項任務(wù)指定的目標(biāo)區(qū)域,在任務(wù)時間內(nèi),規(guī)劃出適合的無人機(jī)方案。
無人機(jī)的任務(wù)分配是指在指定任務(wù)后,為該任務(wù)挑選出合適的無人機(jī),即為任務(wù)規(guī)劃出合理的無人機(jī)方案。首先無人機(jī)方案的無人機(jī)的監(jiān)視范圍均包含任務(wù)區(qū)域,任務(wù)對于無人機(jī)來說是可達(dá)的,其次無人機(jī)方案的無人機(jī)組成必須是最優(yōu)的,既可以滿足任務(wù)需求又能節(jié)省無人機(jī)資源。
1.1.2? ?任務(wù)分配模型及約束條件
無人機(jī)任務(wù)分配的約束指標(biāo)為目標(biāo)成果類型,目標(biāo)區(qū)域地理位置,任務(wù)時間,飛機(jī)起降點,無人機(jī)狀態(tài),無人機(jī)休整時間。利用上述幾項約束條件可以篩選出符合任務(wù)要求的無人機(jī),應(yīng)該在符合條件的無人機(jī)中篩選出對執(zhí)行任務(wù)最有利,對無人機(jī)系統(tǒng)負(fù)載最小的無人機(jī)方案[4]。篩選參數(shù)為無人機(jī)續(xù)航時間,無人機(jī)最大起飛重量,無人機(jī)升限,無人機(jī)抗風(fēng)等級,無人機(jī)翼展,無人機(jī)場地要求,無人機(jī)起降方式。根據(jù)上述參數(shù)形成對應(yīng)目標(biāo)函數(shù),用于評估無人機(jī)對于任務(wù)的優(yōu)先級。
無人機(jī)任務(wù)分配可以看成一個目標(biāo)任務(wù)從n架待選無人機(jī)中挑選出可以滿足任務(wù)需要且選中的m架無人機(jī)是滿足條件的k架無人機(jī)中最符合要求的。下面提出無人機(jī)任務(wù)分配模型,對模型符號做出如下定義。
P(lon,lat):UAV基地坐標(biāo);
UAV={uav1,…,uavn}:無人機(jī)集合;
uavFlyingTime:無人機(jī)續(xù)航時間;
uavMaxWindLevel:無人機(jī)抗風(fēng)等級;
uavMaxFlyheight:無人機(jī)升限;
uavSpan:翼展;
uavStatus:無人機(jī)狀態(tài);
uavTakeoffMode:起降方式;
uavLoad:無人機(jī)載荷;
uavV:無人機(jī)平均速度;
uavType:無人機(jī)類型;
uavMaxTakeoffWegitht:最大起飛重量;
uavControlDistance:無人機(jī)最遠(yuǎn)巡航距離;
uavDegreeofWear:無人機(jī)磨損程度;
uavFuelConsumption:無人機(jī)油耗;
task:任務(wù);
taskTime={startTime,endTime}:任務(wù)起止時間;
taskZone:任務(wù)區(qū)域
Pmax:代表任務(wù)區(qū)域遠(yuǎn)離無人機(jī)基地的最遠(yuǎn)點;
taskResultType:任務(wù)成果類型;
L(Pi,Pj):兩點之間的距離
P(x,y):代表經(jīng)緯度
約束條件:
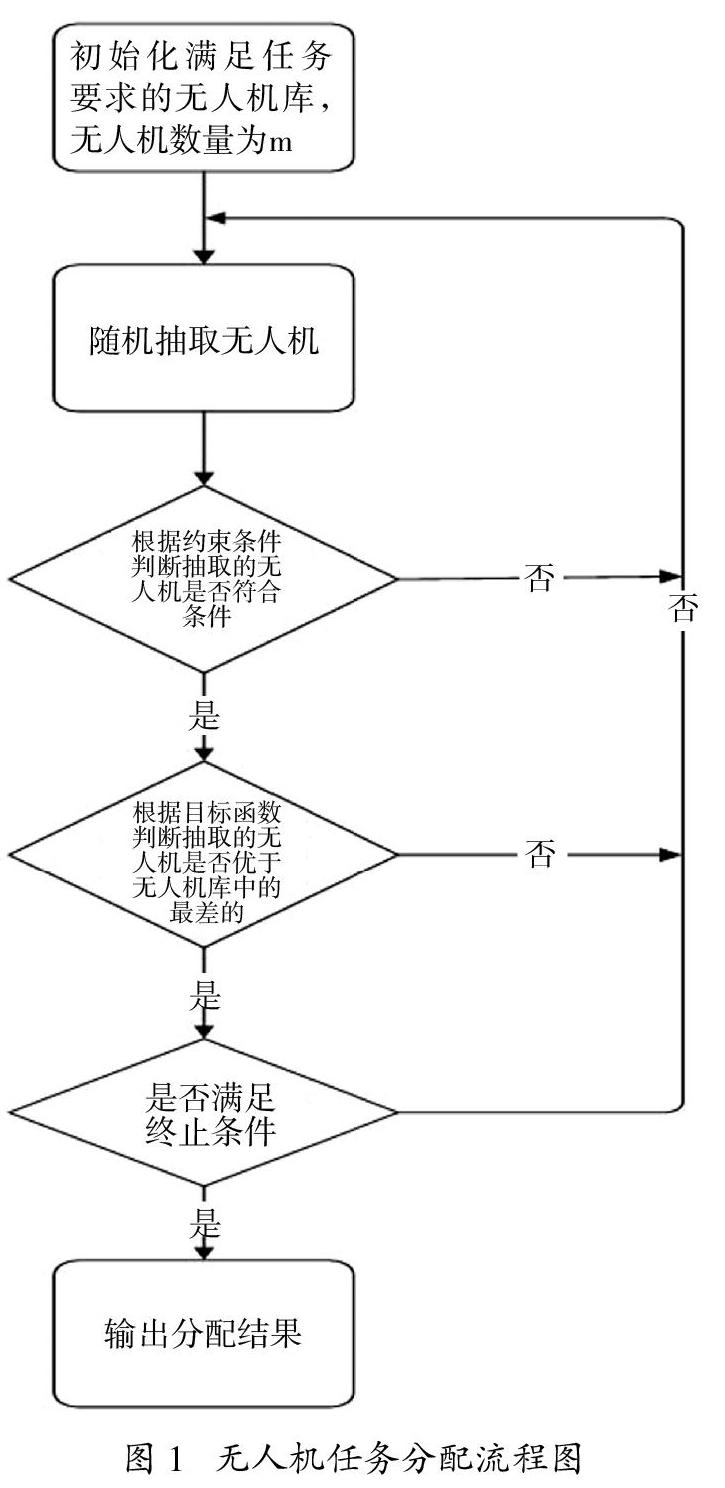
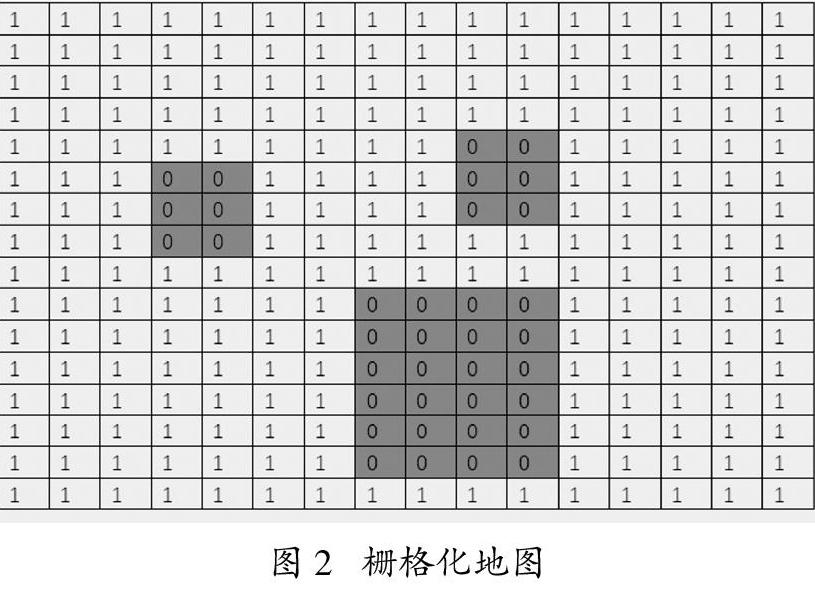
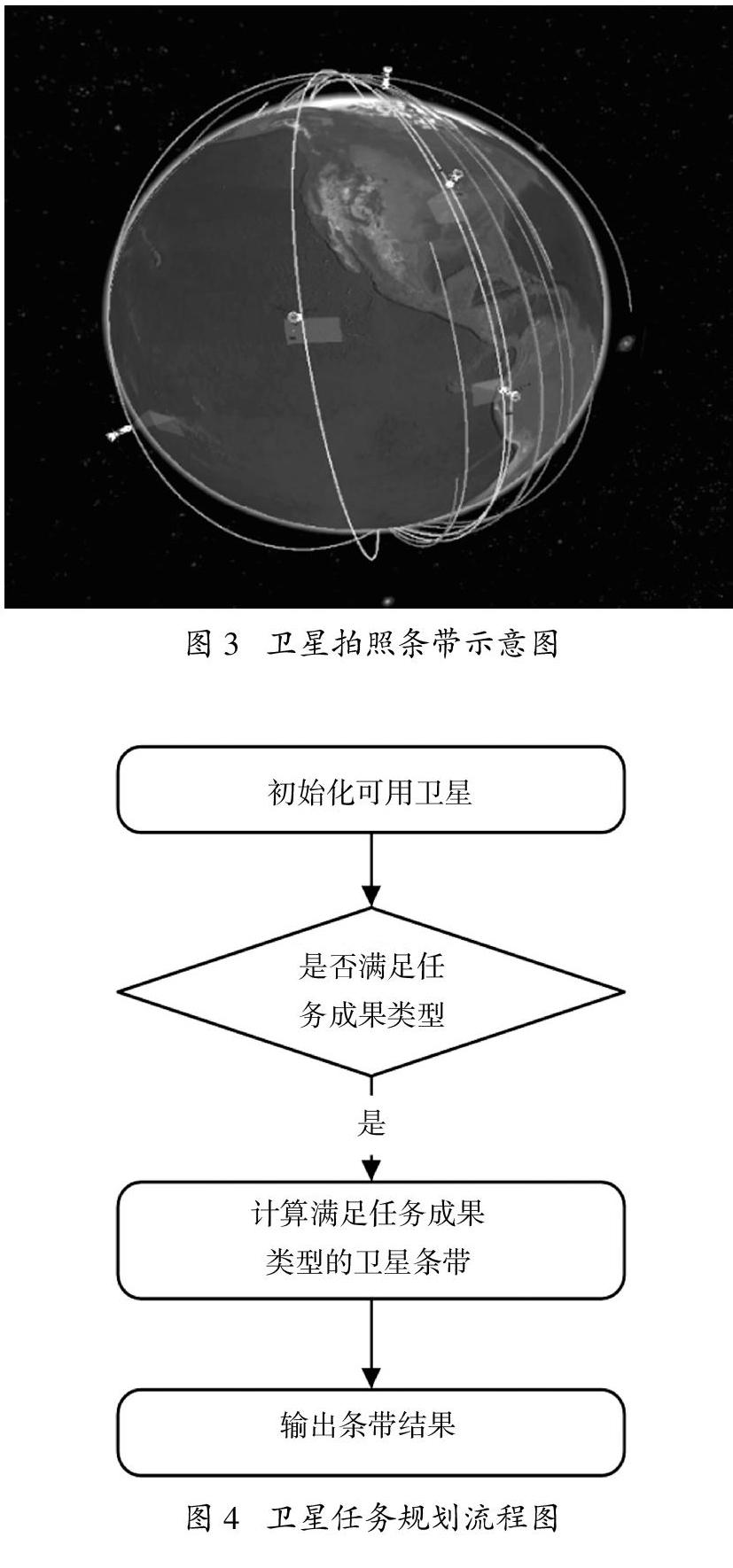
L(P(lon,lat),Pmax) L(P(lon,lat),Pmax)/uavV UavStatus={“空閑”}:無人機(jī)狀態(tài)必須為空閑; taskResultType∈uavLoad:無人機(jī)載荷必須能完成任務(wù)成果的拍攝; 目標(biāo)函數(shù): f(uav)=w1*uavSpan+w2*uavMaxWindLevel+ w3*uavTakeoffMode+w4*uavFuelConsumption+ w5*uavFuelConsumption; 現(xiàn)對評價指標(biāo)作出如下規(guī)定,w1+w2+w3+w4+w5=1;翼展越小越好,抗風(fēng)等級越高越好,油耗越低越好,磨損程度越低越好,起飛方式越簡單越好,則分配的無人機(jī)越優(yōu)。 1.1.2? ? 任務(wù)分配流程 在無人機(jī)任務(wù)分配的模型下,根據(jù)約束條件挑選出滿足任務(wù)要求的無人機(jī),根據(jù)目標(biāo)函數(shù)挑選出最適合的m架無人機(jī)用于執(zhí)行任務(wù)。 由于無人機(jī)數(shù)目n的上限極大,如果其全部進(jìn)行運算會極大的降低任務(wù)分配的效率。本文參考和聲搜索算法,對整個任務(wù)分配流程進(jìn)行改進(jìn)。其算法流程圖如下, 1.2? ?無人機(jī)路徑規(guī)劃 無人機(jī)路徑規(guī)劃在航空領(lǐng)域占據(jù)著十分重要的地位,是無人機(jī)領(lǐng)域的核心技術(shù)[5]。路徑規(guī)劃問題由來已久,各種各樣的算法被大量提出,但面臨這些算法均面臨著相同的問題,無人機(jī)路徑規(guī)劃時間復(fù)雜度過高,計算成本隨著空間的復(fù)雜性會急劇增加。本文對分配的m架無人機(jī)做路徑規(guī)劃執(zhí)行任務(wù),巡視任務(wù)區(qū)域。蟻群優(yōu)化算法是一種基于仿生學(xué)的規(guī)劃算法,為了使蟻群優(yōu)化算法能夠滿足本文的任務(wù)需求,對蟻群優(yōu)化算法進(jìn)行調(diào)整以完成無人機(jī)路徑規(guī)劃[6]。 為實現(xiàn)無人機(jī)路徑規(guī)劃,將無人機(jī)的執(zhí)行任務(wù)的地圖柵格化,將地圖柵格化為320*320,對柵格進(jìn)行編號,次序為從左到右,從上到下,依次編號為1……102400。無人機(jī)路徑規(guī)劃中會遇到禁飛區(qū),因此每個柵格應(yīng)具有兩種狀態(tài),可飛和禁飛,分別用0和1來表示。禁飛區(qū)與柵格的對應(yīng)關(guān)系可能不是完全重合,因此作出規(guī)定,只要單個柵格中存在禁飛區(qū),整個柵格都視為禁飛區(qū)。地圖柵格化如圖2所示。 2? ?衛(wèi)星任務(wù)規(guī)劃 衛(wèi)星資源是有限的,但是衛(wèi)星的任務(wù)卻十分繁重,任務(wù)種類多種多樣。如何利用有限的衛(wèi)星資源,有序且合理的完成任務(wù)十分重要[7]。本系統(tǒng)給定任務(wù)后,指定任務(wù)區(qū)域,在任務(wù)規(guī)定時間內(nèi),利用衛(wèi)星進(jìn)行監(jiān)測,利用衛(wèi)星多種載荷,獲得符合任務(wù)要求的成果類型。因此衛(wèi)星任務(wù)規(guī)劃劃分為衛(wèi)星任務(wù)規(guī)劃與衛(wèi)星規(guī)劃結(jié)果優(yōu)化。 2.1? ?衛(wèi)星任務(wù)規(guī)劃 衛(wèi)星利用裝備的有效載荷可以對任務(wù)要求監(jiān)測的區(qū)域進(jìn)行監(jiān)測,回傳符合任務(wù)要求的成果類型。衛(wèi)星監(jiān)測范圍大,周期短,在任務(wù)規(guī)定時間內(nèi)可以對任務(wù)區(qū)域多次監(jiān)測并實現(xiàn)任務(wù)區(qū)域的全面監(jiān)測。衛(wèi)星的觀測區(qū)域受載荷視場角,幅寬,側(cè)擺角等條件的影響,其示意圖如圖3所示: 根據(jù)衛(wèi)星觀測的原理,完成衛(wèi)星仿真算法,實現(xiàn)可以衛(wèi)星單點查詢,可以獲取衛(wèi)星實時信息,衛(wèi)星軌道查詢,查詢衛(wèi)星下個軌道周期的信息,以及衛(wèi)星條帶的計算。衛(wèi)星任務(wù)規(guī)劃先根據(jù)任務(wù)成果類型挑選出可用的衛(wèi)星,根據(jù)衛(wèi)星仿真算法的條帶計算可以得出覆蓋任務(wù)區(qū)域的衛(wèi)星條帶。其流成圖如圖4所示。 2.2? ?衛(wèi)星規(guī)劃結(jié)果優(yōu)化 由衛(wèi)星算法給出的結(jié)果是所有符合條件的結(jié)果,其條帶區(qū)覆蓋監(jiān)測區(qū)域,監(jiān)測時間滿足任務(wù)時間要求。但是可能出現(xiàn)不同衛(wèi)星的拍攝條帶重合,任務(wù)調(diào)用了過多的衛(wèi)星資源[8]。因此將衛(wèi)星規(guī)劃的結(jié)果優(yōu)化,以最小的衛(wèi)星資源最好的完成任務(wù)是非常重要的,并且可以根據(jù)用戶指定時間段(包含在任務(wù)時間段內(nèi))及用戶指定區(qū)域(包含在任務(wù)區(qū)域內(nèi))重點監(jiān)測,使衛(wèi)星資源傾斜,全面細(xì)致監(jiān)測任務(wù),優(yōu)化規(guī)劃結(jié)果。 衛(wèi)星規(guī)劃結(jié)果優(yōu)化主要在于第一優(yōu)化規(guī)劃結(jié)果,在完成監(jiān)測任務(wù)的前提下,避免浪費衛(wèi)星資源;第二在用戶特定要求下對用戶指定的特定時間和特定地點進(jìn)行重點監(jiān)測,傾斜衛(wèi)星資源,完成任務(wù)。 衛(wèi)星規(guī)劃結(jié)果的優(yōu)化時間空間維度上全面包含任務(wù)時間和任務(wù)區(qū)域,即從任務(wù)開始到任務(wù)結(jié)束衛(wèi)星監(jiān)測區(qū)域的集合包含任務(wù)區(qū)域。對于任務(wù)時間內(nèi)用戶指定的時間段,增加衛(wèi)星資源,對于任務(wù)區(qū)域內(nèi)用戶指定的區(qū)域增加衛(wèi)星資源持續(xù)監(jiān)測。另外應(yīng)該充分考慮衛(wèi)星本身的任務(wù)量以及其他負(fù)荷,慎重給衛(wèi)星分配任務(wù)。 如果用戶給出了重點監(jiān)測的區(qū)域或時間,優(yōu)化過程中會為與重點監(jiān)測區(qū)域或時間相關(guān)的條帶打上標(biāo)簽,在去除重復(fù)條帶過程中帶標(biāo)簽的條帶不參與去重,將全部保留下來,而需要去除重復(fù)的條帶,使用目標(biāo)函數(shù)作為判別指標(biāo),篩選出最優(yōu)的條帶結(jié)果。目標(biāo)函數(shù)為f(satellite)=w1*taskNum+w2*resolution+w3*serviceTime+w4*powerConsumption;參數(shù)說明:taskNum:衛(wèi)星任務(wù)量;resolution:分辨率;serviceTime:服役時間;powerConsumption:單次執(zhí)行任務(wù)功耗;w1+w2+w3+w4+w5=1;任務(wù)量越少越好,服役時間越小越好,分辨率越高越好,功耗越低越好。衛(wèi)星規(guī)劃結(jié)果流程如圖5所示。 3? ?天空基協(xié)同規(guī)劃的實驗測試 使用戴爾服務(wù)器一臺,56G內(nèi)存,2T磁盤。戴爾電腦一臺,8G內(nèi)存,500G磁盤。使用Matlab,IDEA和webStorm作為開發(fā)工具,完成基于天空基的海上目標(biāo)業(yè)務(wù)系統(tǒng)。 UAV路徑規(guī)劃采用蟻群優(yōu)化算法計算出最優(yōu)的無人機(jī)路徑,將海上地圖柵格化,設(shè)定起點為編號1的柵格,終點為編號為102079的柵格,在柵格設(shè)置禁飛區(qū),黑色區(qū)域為禁飛區(qū),進(jìn)行規(guī)劃最優(yōu)路徑,最優(yōu)路徑結(jié)果圖6: 衛(wèi)星規(guī)劃結(jié)果優(yōu)化可以以最少的衛(wèi)星完成下達(dá)的任務(wù),避免了資源的浪費,綜合統(tǒng)籌了衛(wèi)星資源。新建? 任務(wù)區(qū)域為,任務(wù)時間為5.31-6.6日,時間為7天,成果類型為正射影像,SAR影像。采用10顆衛(wèi)星進(jìn)行規(guī)劃,衛(wèi)星任務(wù)規(guī)劃結(jié)果如圖7所示: 由圖7可以看出,任務(wù)規(guī)劃結(jié)果在區(qū)域上存在重合,在無特殊任務(wù)要求情況下,衛(wèi)星條帶區(qū)域,只需要在指定時間內(nèi)完成對區(qū)域的監(jiān)測,實現(xiàn)條帶對區(qū)域的覆蓋即可。因此對衛(wèi)星規(guī)劃結(jié)果進(jìn)行優(yōu)化,如圖8所示: 由圖8可以看出在規(guī)定的時間內(nèi),優(yōu)化之后的衛(wèi)星條帶可以是實現(xiàn)對任務(wù)區(qū)域的全部覆蓋,避免了過多的衛(wèi)星資源同時執(zhí)行一個任務(wù)造成資源浪費。 衛(wèi)星優(yōu)化前后結(jié)果對比如表1所示。表中優(yōu)化方案為衛(wèi)星名稱與衛(wèi)星拍攝影像時間,時間表示為日期與24小時制時間。 通過表1可以看出將方案削減為只有兩顆衛(wèi)星,在時間上覆蓋率足夠,從圖8中可以看出區(qū)域覆蓋率較高。因此驗證了衛(wèi)星優(yōu)化的成果。 天空基協(xié)同針對于此任務(wù)的規(guī)劃結(jié)果為衛(wèi)星監(jiān)測與無人機(jī)巡航相結(jié)合協(xié)同完成任務(wù)[9-10],其中紅色邊框矩形為任務(wù)區(qū)域,兩個紫色大矩形為衛(wèi)星監(jiān)測區(qū)域,帶有無人機(jī)圖標(biāo)的小區(qū)域為無人機(jī)巡航區(qū)域,帶有經(jīng)緯度圖標(biāo)的圖形為無人機(jī)起飛基地。其結(jié)果如圖9所示: 4? ?結(jié)? ?論 設(shè)計并實現(xiàn)了基于天空基協(xié)同的海上目標(biāo)任務(wù)規(guī)劃,分別實現(xiàn)了無人機(jī)任務(wù)分配、無人機(jī)路徑規(guī)劃、衛(wèi)星任務(wù)規(guī)劃、衛(wèi)星規(guī)劃結(jié)果優(yōu)化四部分。通過天空基協(xié)同即無人機(jī)與衛(wèi)星聯(lián)動,實現(xiàn)在規(guī)定時間內(nèi)對指定區(qū)域采集特定成果類型的數(shù)據(jù),完成指定的海上目標(biāo)任務(wù)。最終經(jīng)過測試,通過無人機(jī)路徑規(guī)劃可以為符合任務(wù)要求無人機(jī)規(guī)劃出合適的任務(wù)執(zhí)行路徑,通過衛(wèi)星規(guī)劃結(jié)果優(yōu)化可以極大的節(jié)約衛(wèi)星資源的同時完成任務(wù),衛(wèi)星與無人機(jī)協(xié)同完成海上目標(biāo)任務(wù),實現(xiàn)海上廣域目標(biāo)和移動目標(biāo)的監(jiān)測與多源遙感融合。 參考文獻(xiàn) [1]? ? 梁星星,修保新,范長俊,等. 面向海上移動目標(biāo)的空天協(xié)同連續(xù)觀測模型[J]. 系統(tǒng)工程理論與實踐,2018,38(01):229-240. [2]? ? 柯春艷,安思. 無人機(jī)全局路徑規(guī)劃算法研究[J]. 信息技術(shù),2019,43(05):33-35. [3]? ? 齊小剛,李博,范英盛,等. 多約束下多無人機(jī)的任務(wù)規(guī)劃研究綜述[J/OL].智能系統(tǒng)學(xué)報:1-14[2019-06-10]. [4]? ? 魯娟. 無人機(jī)在海上艦船目標(biāo)識別中的應(yīng)用[J]. 艦船科學(xué)技術(shù),2017,39(12):182-184. [5]? ? 陳俠,艾宇迪,梁紅利. 基于改進(jìn)蟻群算法的無人機(jī)三維航跡規(guī)劃研究[J]. 戰(zhàn)術(shù)導(dǎo)彈技術(shù),2019,(02):59-66. [6]? ? 焦陽. 基于改進(jìn)蟻群算法的無人機(jī)三維路徑規(guī)劃研究[J]. 艦船電子工程,2019,39(03):41-45. [7]? ? 向尚,陳盈果,李國梁,等. 衛(wèi)星自主與協(xié)同任務(wù)調(diào)度規(guī)劃綜述[J]. 自動化學(xué)報,2019,45(02):252-264 [8]? ? 韓傳奇,劉玉榮,李虎. 基于改進(jìn)遺傳算法對小衛(wèi)星星群任務(wù)規(guī)劃研究[J]. 空間科學(xué)學(xué)報,2019,39(01):129-134. [9]? ? 梁星星. 面向海上移動目標(biāo)跟蹤觀測的空天協(xié)同任務(wù)規(guī)劃研究[D]. 長沙:國防科學(xué)技術(shù)大學(xué),2016. [10]? CROSS P L. Maritime automated targets recognition algorithm test bed for high resolution ISAR imagery[P]. 2013.
猜你喜歡
電腦知識與技術(shù)(2016年28期)2016-12-21 12:21:32電子技術(shù)與軟件工程(2016年19期)2016-12-19 18:28:28新教育時代·教師版(2016年27期)2016-12-06 18:14:59中國科技縱橫(2016年17期)2016-11-30 11:51:57農(nóng)機(jī)使用與維修(2016年10期)2016-11-10 09:45:55人間(2016年26期)2016-11-03 17:52:40中國科技博覽(2016年22期)2016-11-01 18:10:31科技視界(2016年22期)2016-10-18 14:30:27企業(yè)導(dǎo)報(2016年9期)2016-05-26 20:58:26