基于特征結構配置的飛機橫航向控制律設計
2020-01-08 07:26:30翁雪花項國輝鄒俊俊余云鵬
教練機 2019年4期
翁雪花,項國輝,鄒俊俊,余云鵬
(航空工業洪都,江西 南昌,330024)
0 引言
控制律設計是電傳/自動飛行控制系統的核心技術之一,一直受到設計人員的高度重視。迄今為止,控制律設計依據主要是經典控制理論和現代控制理論。
經典控制理論是針對單輸入單輸出 (SISO)的線性時不變系統,經典控制理論主要包括:勞斯(Routh)穩定判據、Nyquist分析、根軌跡法、頻率法(Bode圖)等。目前,控制律設計在工程實踐中所使用的方法為調參法。控制律一般為PID結構,控制參數設計通常使用極點配置方法、根軌跡分析法等較為經典的方法。
隨著飛行包線的不斷擴展及新型飛行器的不斷出現,控制律設計面臨的挑戰不斷增加,現代控制理論和方法的應用研究不斷得到重視。現代控制理論較經典控制理論的應用范圍廣,既可用于單輸入單輸出(SISO)的線性時不變系統、也可用于多輸入多輸出(MIMO)的線性/非線性系統、時不變/時變系統。現代控制理論主要包括:線性系統理論、最優控制理論、非線性系統理論、隨機控制理論、自適應控制理論、魯棒控制理論等。
本文研究具有工程應用前景的控制方法——特征結構配置方法。
1 基于特征結構配置的控制律設計方法
特征結構配置方法是一種基于時間域的多變量系統設計方法,通過對線性系統配置不同的特征向量及特征值,將期望的系統性能和解耦要求轉化為特征值和特征向量,類似經典控制理論中的零極點配置。
結合飛機的飛行品質中對飛機方程特征值等的要求,特征結構配置可直接選擇適當的特征值和特征向量,使飛機能夠實現預期的動態響應特性。在飛機的特征結構配置中,選擇的特征值能夠實現控制系統的穩定,特征向量能夠實現控制系統動態響應的解耦,二者一起保證系統的動態性能。因此,特征結構配置方法在飛行控制系統設計中有著廣闊的應用前景。
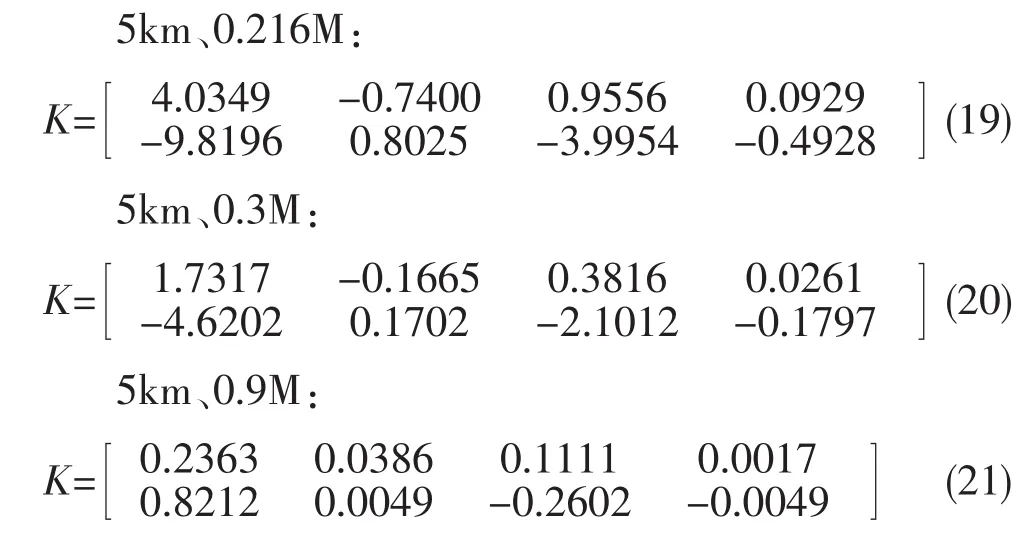
本 文 以 某 型 教 練 機 5km、0.216M,5km、0.3M,5km、0.9M三個狀態點為例,應用特征結構配置方法設計飛機橫航向的控制律。
1.1 特征結構配置方法描述
對于系統

其中,x為n維狀態向量;u為r維輸入向量,y為m維輸出向量;A為n×n維的常數矩陣、B為n×r維的常數矩陣、C為m×n維的常數矩陣、D為m×r維的常數矩陣。
其狀態反饋控制律為

則有

其中,A∈Rn×n、B∈Rn×m、K∈Rm×n、G∈Rn×n、x∈Rn×1、u∈Rn×1。 若G具有n個互異特征值 λi,i=1,2,…,n,其對應的特征向量為vi,則有

特征結構配置方法即尋找K,使得G即(A+BK)含有規定的特征值和特征向量。
1.2 基于特征結構配置的控制律設計
依據特征結構配置方法,首先選擇期望的特征值和特征向量。 選取狀態變量x=[β ωxωyγ],n=4,控制輸入為u=[δxδy]。
由GJB 185-86一級標準規定,最小無阻尼自振頻率ωnd不小于 1.0,阻尼比 ζd不小于0.19,阻尼ζd*ωnd不小于0.35,滾轉模態時間常數不應大于1.0s,最小螺旋模態倍幅時間應大于12s。選擇荷蘭滾特征根為-2.5±2.5i,對應的荷蘭滾阻尼比為 0.7071,荷蘭滾頻率為3.5355,滾轉特征根為-3,對應的滾轉模態時間常數為0.33s,螺旋特征根為-0.002,對應的螺旋模態倍幅時間為500s,則期望的特征值:

由特征結構配置方法可知,令與上述期望的特征值所對應的特征向量中需要解耦的模態元素為零,就可以得到滿足要求的解耦設計結果,使控制系統具有期望的動態性能。為了使橫向與航向解耦,選擇與期望特征值所匹配的特征向量如式(6):
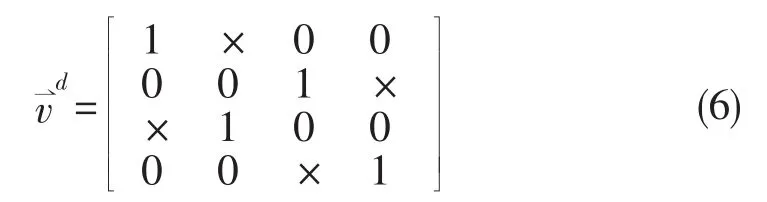
其中“×”表示未受約束(即任意的)項,而所有其他值(包括“0”)表示嚴格的特征向量約束。

其中,是特征向量中嚴格約束的元素組成的向量,是中未受約束的元素組成的向量,i=1,2,3,4。
對于第i個特征值對應的 2(rank(B)=2)子空間L,如式(8)所示。


將期望的特征向量投影到上述重新排序后的子空間,可得可達到的特征向量,即

式(10)中選擇的要使得性能指標最小化,則有
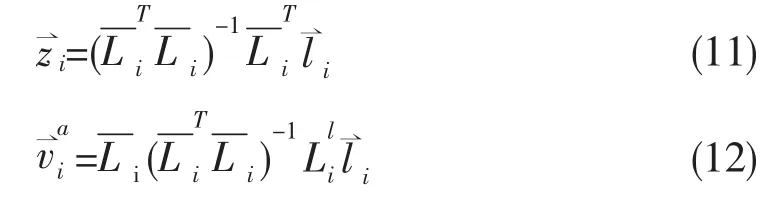
對每個不同的特征值λi,可以得出相應的。將統一起來,且組成一個矩陣。

最后,計算反饋增益矩陣。
由于矩陣B的秩為r(r=2),小于n,引入線性變換T=[B…M],使得變換后的矩陣的秩為n,則
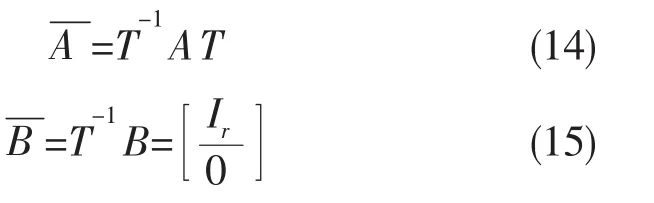
變換后實際特征向量為
其中是變換后特征向量的前r個元素。
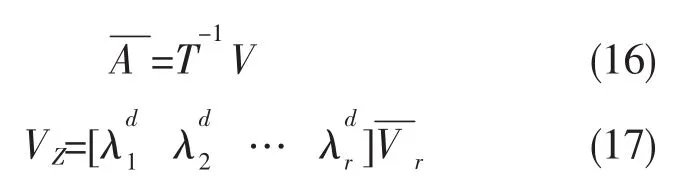
選擇變換后矩陣前r行,則有

綜上,通過計算,可得到基于特征結構配置的反饋矩陣K為
2 仿真驗證
基于上述方法得到的控制律,在MATLAB Simulink下搭建模型,該模型包括控制系統、作動器和飛機方程,框圖如圖1所示。
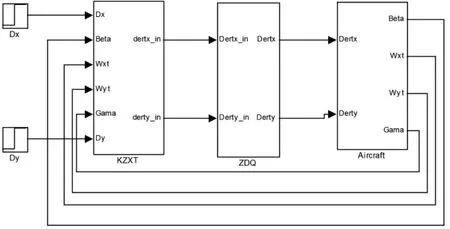
圖1 仿真模型示意圖
2.1 仿真分析
分別輸入10°/s的滾轉角速率指令和1°的側滑角指令,三個狀態點的仿真結果如圖2和圖3所示。
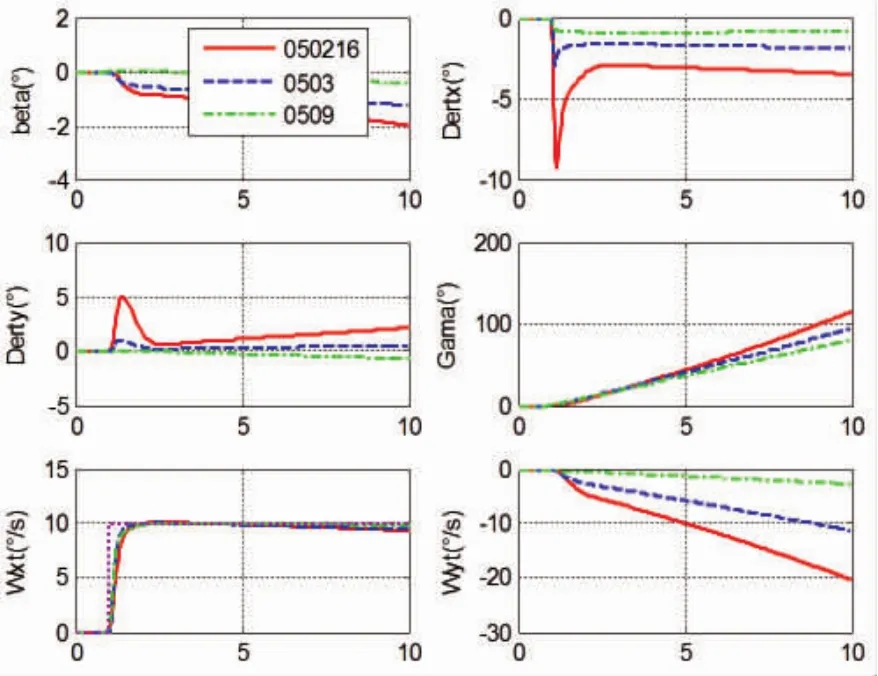
圖2 10°/s滾轉角速率指令仿真結果
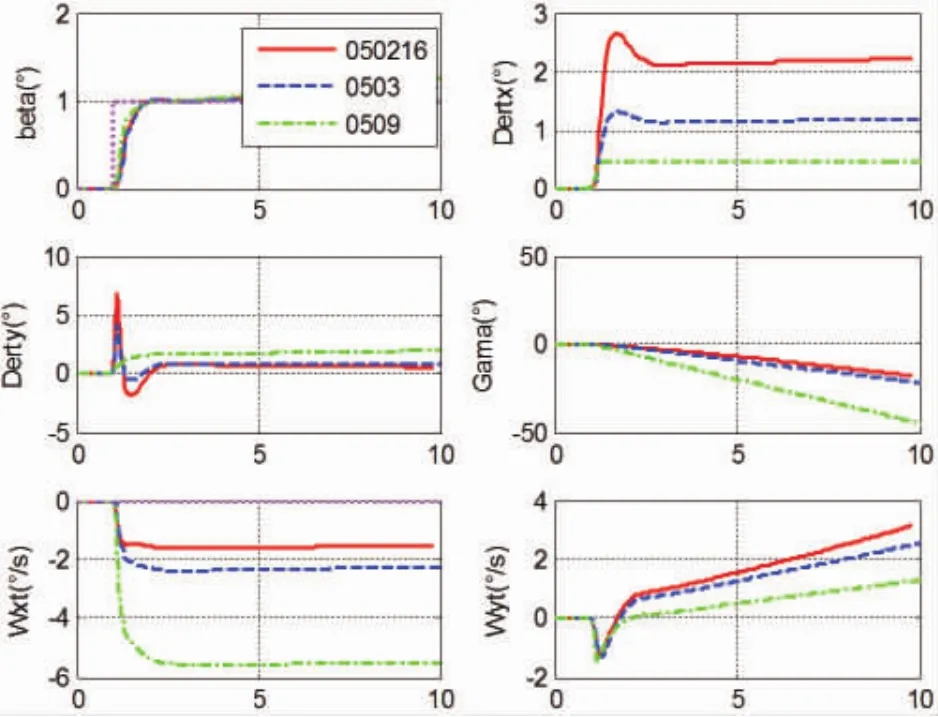
圖3 1°側滑角指令仿真結果
由仿真結果可知,當給定10°/s滾轉角速率指令時,飛機滾轉角速率能夠迅速跟蹤指令,且曲線平滑,幾乎沒有穩態誤差,同時產生的側滑角較小;當給定1°側滑角指令時,飛機側滑角能夠平滑、較好的達到所給定的指令值,幾乎沒有超調,響應速度快,同時產生的滾轉角速率較小。由此可以驗證該方法能夠較好的實現橫航向解耦。
2.2 對比分析
以0503狀態點為例,將基于特征結構配置得到的反饋控制律與經典理論方法設計的控制律仿真結果對比,如圖4和圖5所示。
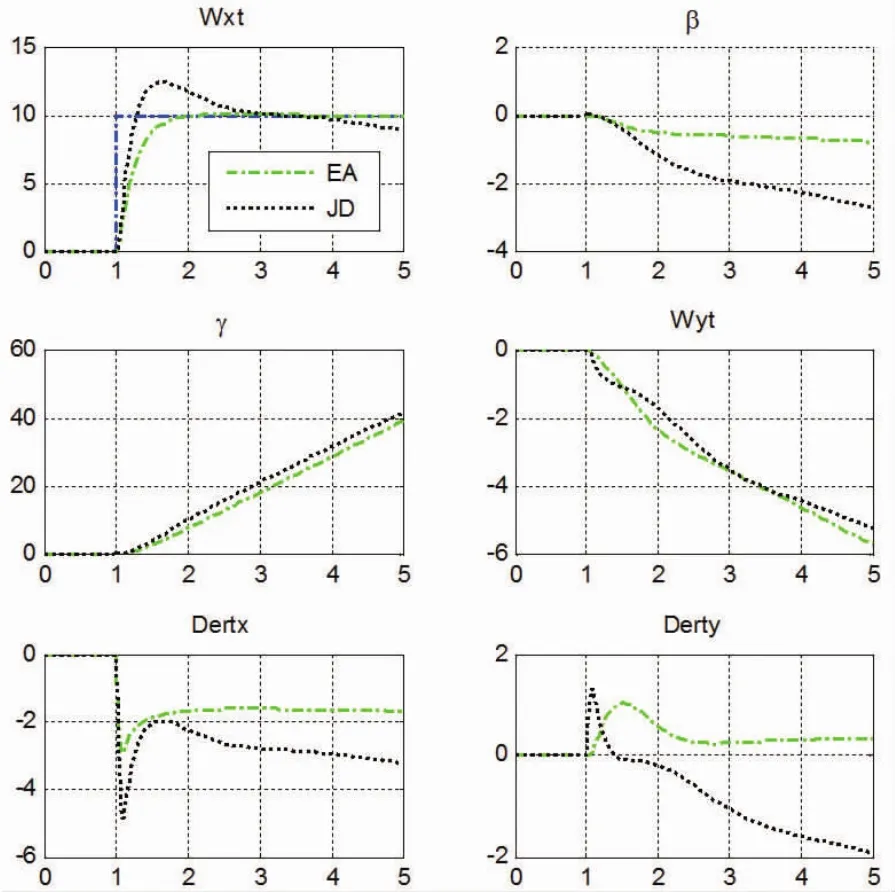
圖4 10°/s滾轉角速率指令仿真對比
由對比結果可以得到,當給定10°/s滾轉角速率指令時,基于特征結構配置方法能夠較為平滑的達到指令值,而經典理論方法的響應速度較快,但存在超調,前者同時產生的側滑角較小,較好的實現了橫航向解耦;當給定1°側滑角指令時,二者的響應速度相當,基于特征結構配置方法的曲線較為平滑,不存在超調。
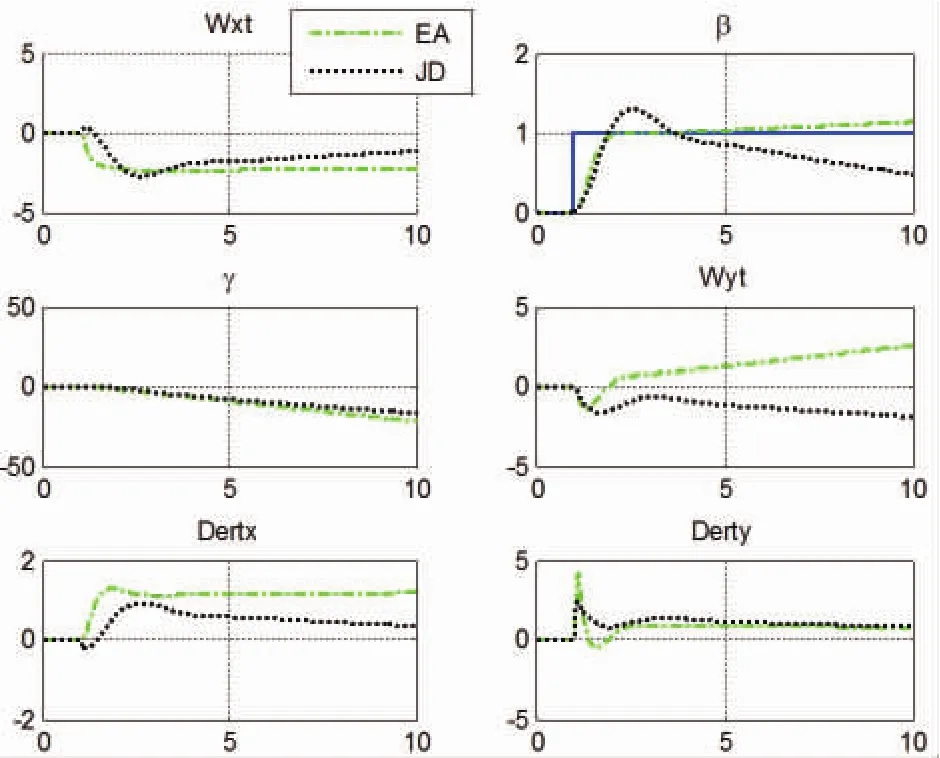
圖5 1°側滑角指令仿真對比
3 結論
基于特征結構配置方法得到的控制律能夠平滑的跟蹤指令,響應速度快且能夠較好實現橫航向解耦。較經典理論,該方法能夠一次性求出反饋系數,且在所求出的反饋控制律下,飛機響應平滑迅速,再根據飛行品質計算結果調整優化個別參數,縮短了控制律設計的時間,提高了效率。
猜你喜歡
科普童話·神秘大偵探(2023年1期)2023-05-30 12:48:10
當代陜西(2022年5期)2022-04-19 12:10:18
新世紀智能(數學備考)(2021年9期)2021-11-24 01:14:28
湘潮(上半月)(2021年4期)2021-07-20 08:05:28
汕頭大學學報(自然科學版)(2020年4期)2020-12-14 07:05:00
瘋狂英語·新策略(2019年10期)2019-12-13 08:43:28
當代陜西(2019年10期)2019-06-03 10:12:04
測控技術(2018年5期)2018-12-09 09:04:26
電子測試(2018年18期)2018-11-14 02:30:34
數學小靈通·3-4年級(2017年9期)2017-10-13 08:10:54
