基于加速度計與氣壓計信息協同融合的相對高度測量方法
2020-01-09 09:36:04周年榮唐立軍徐國壘張遠思趙丹
云南電力技術 2019年6期
周年榮,唐立軍,徐國壘,2,張遠思,3,趙丹
(1.云南電網有限責任公司電力科學研究院,昆明 650011;2.昆明理工大學機電工程學院,昆明 650500;3.昆明理工大學理學院,昆明 650500)
0 前言
隨著社會的發展,相對高度在很多工程項目中成為了一個不可缺少的物理參數,如室外高壓作業人員爬塔,無人機定高[1]、建筑工地高度測量等。目前相對高度測量方法有傳統機械式的直接測量法,紅外激光測量,超聲波測量,GPS 測量,基于氣壓傳感器電子儀器的間接計算測量。傳統的機械測量量程有限,體積大,不易攜帶,紅外激光和超聲波的測量精度高,卻會受到障礙物的影響,GPS 測量雖然能到達較好的效果,但成本高;相比較而言,利用氣壓傳感器間接測量相對高度更具有發展前景。
目前利用氣壓傳感器間接測量相對高度的方法有三種:一種是基于BP 神經網絡算法計算相對高度[2];一種采用標準或改進的氣壓高度公式計算相對高度[3];另外一種是利用加速度計積分測量相對高與氣壓計間接測量相對高度互補濾波計算相對高度[4-5]。由于外部環境下氣壓不斷變化,標準公式或改進的氣壓高度公式不能降低測量誤差[6];BP 神經網絡需要大量的訓練才能運用,但是外部環境隨時都在變化,導致該方法運用在外界環境的可靠性不高;由于加速度計的二次積分會導致誤差增加,故利用加速度計積分測量相對高與氣壓計間接測量相對高度互補濾波計算相對高度也不能達到外界環境下所需精度。為了在外部環境下獲取更精確的相對高度測量值,本文提出利用加速度計與氣壓計信息協同融合測量相對高度方法。
經過實驗觀察,得到氣壓傳感器測量相對高的動態性能良好,但靜態過程中受外界因素影響導致信息漂移[7],引起運用過程中出現極大的誤差;而加速度傳感器能較好的識別作業人員是否處于運動狀態;基于兩種傳感器的特征,本文利用加速度計與氣壓計信息協同融合測量相對高度。該方法通過加速度計采集的三軸加速度矢量和的值的變化幅度是否大于設置的閾值來判斷作業人員所處的相對高度是否發生變化,如果判斷相對高度發生變化,氣壓計采集到的海拔高度變化有效,否則無效。該方法減小氣壓計間接測量的誤差,降低成本,便于攜帶并且不受障礙物影響,具有廣泛的適應性。
1 傳感器測量原理
1.1 氣壓計間接測量相對高度原理
氣壓傳感器用于測量氣體的絕對壓強的一種儀器,該傳感器向上或向下運動時,傳感器所處海拔高度值發生變化,采集到的壓強值隨海拔高度的變化而變化,本文通過壓強與海拔高度的轉換關系,通過壓強值計算出相應的海拔高度值[2],式(1)為轉換公式。
式中:H表示海拔高度,單位為m,P為氣壓傳感器采集當前位置的大氣壓值,P0為標準的大氣壓值。
為了將其輸出的海拔高度值從零開始記錄,先對其轉換后的海拔高度值進行校正,校正公式如下:

其中式(2)為初始化情況下的靜止狀態中前N次海拔高度值H的求和公式,N為海拔高度值個數,H_sum為N次海拔高度值的總和;式(3)為N次初始數據求平均值的公式,H_average為平均值;式(4)為校正后的相對高度值公式,其中relative_H為載體相對于初始位置的相對高度值。
1.2 加速度計識別動態特性原理
加速度計傳感器是一種能夠測量加速度的傳感器,該傳感器具有較高的靈敏度,能較好的識別傳感器的運動特性,本文主要針對于傳感器上下運動特征提取。
加速度傳感器由于安裝角度不一樣,傳感器采集到的X、Y、Z 三軸加速度值不同,為了解決這一問題,本文采用三軸加速度矢量和的值提取運動特征,三軸合加速度受安裝角度影響不大。三軸加速度矢量和的計算如式(5):

式中A_XYZ 表示三軸加速度矢量和的值,A_X表示X軸方向上的加速度值,A_Y表示Y軸方向上的加速度值,A_Z表示Z軸方向上的加速度值;
1.3 氣壓計與加速度計信息協同融合結構圖
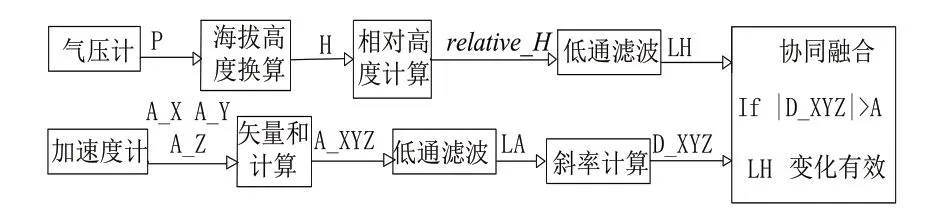
圖1 氣壓計與加速度計協同濾波結構圖
圖1 中,P為氣壓計采集到的壓強值,通過壓強值P利用海拔高度換算為海拔高度H,LH為H低通濾波過后的值;A_XYZ為加速度計采集到的三軸加速度矢量和的值,LA為A_XYZ低通濾波之后的值,D_XYZ為LA的斜率計算值;A為判斷載體是否處于靜止的閾值,且A>0,如果LA>A, 則載體處于上升或下降狀態,否則,載體為靜止狀態。
2 加速度計與氣壓計協同融合
2.1 數據預處理
傳感器采集到的原始數據帶有噪聲,采用軟件低通濾波對三軸加速度矢量和的值與海拔高度值進行數據預處理[8],為了更加明確的區分出載體是否上升,對低通濾波后的三軸加速度矢量和的值進行微分計算,并取微分后的絕對值,計算公式如下,其濾波方程為
式(6)為三軸加速度矢量和數據預處理公式,其中LA(n)與LA(n-1)分別為(n)與(n-1)時刻三軸加速度矢量和數據濾波后輸出值,A_XYZ(n)為n 時刻三軸加速度矢量和的原始數據,m1為濾波系數,該系數取值范圍為0<m1<1,它可以影響輸出值的穩定性和響應速度。
式(7)中D_XYZ(n)為三軸加速度矢量和的斜率值的絕對值,T為采樣頻率。
式(8)為相對高度數據低通濾波公式,其中LH(n)與LH(n-1)分別為(n)與(n-1)時刻經過低通濾波后的海拔高度值,relative_H(n)為(n)時刻相對初始位置的原始高度值數據,m2為低通濾波系數,該系數取值范圍為0<m2<1。
2.2 協同融合參數設置
2.2.1 協同融合理論
本文將加速度計與氣壓計水平安裝在作業人員的頭頂,通過加速度計與氣壓計信息協同融合測量作業人員相對高度。
根據加速度計在靜止狀態下與運動狀態下采集到的三軸加速度矢量和的值的變化幅度不同,設置一個閾值A,當三軸加速度矢量和經處理之后得到D_XYZ的絕對值大于閾值A時,判斷作業人員所處的相對高度值發生變化,否則判斷作業人員所處相對高度值沒有發生變化。由于氣壓計具有良好的動態性能,因此根據D_XYZ的絕對值判斷作業人員所處相對高度發生變化時氣壓計間接測量得到的相對高度值有效,否則無效。
經過數據預處理之后,得到相對起點的高度值與三軸加速度矢量和的斜率值的絕對值的關系,將它們坐標表示如圖2。
從圖2 中可以看出,當作業人員向上運動時,相對起始點的高度值呈明顯上升狀態,三軸加速度矢量和的斜率值的絕對值波動也很大;當作業人員停在某一位置時,相對起始點的高度值變化相對較弱且不穩定,三軸加速度矢量和的斜率值的絕對值波動很小;分析數據變化特征,設置三軸加速度矢量和的斜率值的絕對值D_XYZ的相關閾值,當三軸加速度矢量和的斜率值的絕對值大于這個閾值的時候,氣壓計間接測量相對高度變化有效,否則判斷無效并忽略。
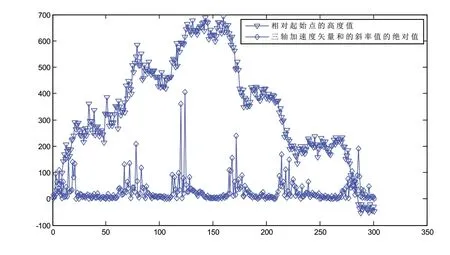
圖2 加速度絕對值與相對高度值
2.2.2 閾值設置
當三軸加速度矢量和的斜率值的絕對值的閾值設置過大,會忽略掉其中一些有效信息,設置過小,一些無效信息被誤認為有效,為了得到一個合理的閾值,本文通過觀察,人為判定作業人員所處相對高度是否發生變化,提取相應的數據段取平均值。
通過在同一高度內進行7 次反復上升下降試驗,其中上升過程中在三處不同高度下停止一段時間,得到作業人員所處相對高度發生變化段的數據平均值為52.5,靜止段的數據平均值為9.6,設置閾值A范圍為9.6<A<52.5;在作業人員所處相對高度發生變化過程中,會出現小于A的值,在停止過程中也會出現大于A的值,接下來分別設置A等于40、35、30、25、20、15、10,計算作業人員所處相對高度發生變化過程中采集數據大于A的次數h_m占該過程中所有采集數據次數sum_h之比,比值為h_ p;停止過程中采集數據小于A的次數l_ m與該過程中采集的總次數sum_l之比,比值為l_ p,且h_p與l_ p分別為兩種工作過程中的有效數據占總數據的比值,計算式如(9)、(10):
通過計算得到設置不同閾值后的相應比值,當設置閾值A變小時,作業人員所處相對高度發生變化中三軸加速度矢量和的斜率值的絕對值大于閾值的比例逐漸增大,停止段中三軸加速度矢量和的斜率值的絕對值小于閾值的比例逐漸減小;兩種過程中的比值之和先增大后減小,故本文設置閾值為A=15。
2.2.3 相關系數設置
上升或下降過程中,三軸加速度矢量和的斜率值的絕對值大于閾值A=15 的次數占總次數的0.716,即是一部分有效信息被忽略,故有效的相對起始點的高度值需乘以一個相應系數β,β計算公式如下:

2.3 有效相對高度計算
作業人員所處相對高度發生變化過程中三軸加速度矢量和的斜率值的絕對值大于閾值時,有效相對高度計算公式如下:

式(12) 中effective_h(n)與effective_h(n-1)分別為作業人員所處相對高度發生變化過程中n 與n-1 時刻的有效相對高度值,relative_H(n)與relative_H(n-1)分別為作業人員所處相對高度發生變化過程中n 與n-1 時刻相對起始點的高度值;當判斷為禁止狀態時,有效相對高度值effective_h不變。
3 測試結果與分析
3.1 利用加速度計與氣壓計信息協同融合測量相對高度實驗數據分析
本文選取學校附近某一高壓塔的部分安全高度作為測量平臺,由于激光測量50 m 以內的測量距離誤差與實際的相差1 mm,所以實驗以激光傳感器測得的621 cm 高度作為參考高度,將加速度計與氣壓計水平安裝在作業人員的頭頂,其中對采集到的相對高度值進行低通濾波,得到圖3 所示結果,可以看出通過低通濾波后的相對高度值較為平滑。
經過協同濾波后的數據曲線如圖4 所示。
圖中可以看出當作業人員停止不運動時,經過協同融合后得到的相對高度基本沒有波動,在到達最高點的時候,可以看到圖中的坐標顯示為595.8cm,與激光測到的高度值相差25.2cm,能達到室外環境下測量相對高度的精度要求。
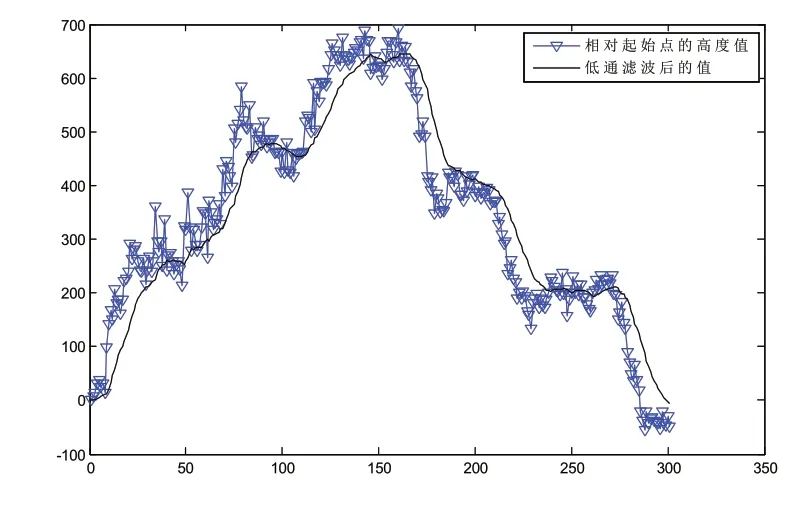
圖3 相對起始點的高度值低通濾波
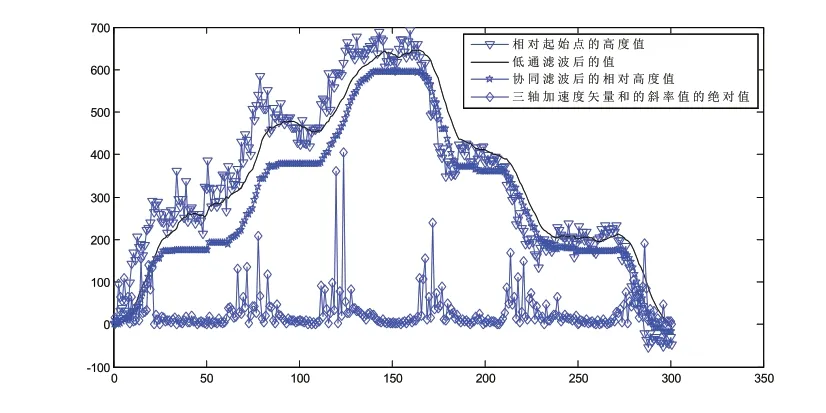
圖4 協同濾波后的數據曲線
3.2 加速度計與氣壓計協同融合測量相對高度優越性及誤差分析
目前氣壓計測量相對高度的運用范圍越來越廣,但是精度不高,尤其在室外工作,將受到各種各樣因素影響,如劇烈的風速,太陽的光照,以及溫度等將會使得氣壓計采集的大氣壓強發生巨大的變化,從而導致測量的海拔高度發生巨大的誤差;本文提出利用加速度計與氣壓計信息協同融合測量相對高度的方法,大幅度降低劇風、溫度、光照等因素所引起的誤差,通過本文提出的利用加速度計與氣壓計信息協同融合測量相對高度方法測得的高度與激光測到的高度相比較,其誤差為4.058%。
綜上所述,本文提出的利用加速度計與氣壓計信息協同融合測量相對高度增強了氣壓計在外界環境中測量相對高度穩定性,減小相對高度測量的誤差,拓展了該儀器的使用范圍,具有一定的推廣價值。
4 結束語
本文研究并實現了利用加速度計與氣壓計信息協同融合測量相對高度,通過提取作業人員工作過程中加速度計與氣壓計采集到的數據,通過加速度計與氣壓計信息協同融合測量作業人員相對初始位置的相對高度;本實驗在室外環境下進行,采集作業人員隨意上升或下降過程中的數據并進行協同融合,得到的結果與50 m 測距激光相對比,誤差在4.058%,達到室外很多工程項目中的需求精度,同時相對于氣壓式傳感器利用GA-BP 神經網絡測量相對高度更容易實現,應用范圍更廣。該方法具有成本低,可靠性高,穩定,適用性強等優點,有著廣泛的應用前景。
猜你喜歡
新作文·小學低年級版(2021年9期)2021-11-27 07:57:46
學生天地(2020年17期)2020-08-25 09:28:54
少年博覽·初中版(2020年6期)2020-06-12 11:42:23
中學生數理化·八年級物理人教版(2019年9期)2019-11-25 07:33:02
中學生數理化·八年級物理人教版(2019年3期)2019-04-25 06:20:54
中學生數理化·八年級物理人教版(2018年3期)2018-05-31 08:52:45
數學小靈通(1-2年級)(2017年10期)2017-11-08 08:39:45
故事大王(2016年7期)2016-09-22 17:30:08
少兒科學周刊·兒童版(2016年1期)2016-03-14 03:52:21
兒童故事畫報(2013年3期)2013-06-24 05:40:30