工業擰緊技術發展現狀分析
2020-01-14 01:49:12朱博
中國設備工程 2019年24期
朱博
(大連康展機電工程有限公司,遼寧 大連 116000)
擰緊的方法發展至今也有很多種,下面就介紹一下目前最常用的三種擰緊方法:
(1)扭矩控制法。是擰緊扭矩達到設定的落座扭力值的時候,即刻停止的擰緊工藝方法,是現在工業中最為基礎的。當螺紋連接時,其周向摩擦力與擰緊時所施加的擰緊扭矩成正比的關系。
(2)扭矩、轉角控制法。是把螺栓擰到第一次要求的落座扭矩后,再開始擰緊,轉動工藝上要求的一定角度的擰緊方法。它的優點是把螺栓或螺母擰到工件之間的緊密接觸面時,并克服一些工件表面粗糙度不好的因素。而螺栓軸的預緊力主要是在為后面的旋轉角度而做的鋪墊而獲得的。因此其精度比第一種扭力控制法在精度要求上高不少。
(3)落座點、轉角控制法。落座點、轉角控制法是最近新出現的一種控制方法,它是在扭矩、轉角控制法基礎上發展起來的。扭矩、轉角控制法是以某一預扭矩點為轉角的起點,而落座點、轉角控制法是計算轉角的起點,采用扭矩曲線的線性段與轉角顯示的坐標交點。
1 從螺栓擰緊扭力的檢查方法
1.1 螺栓擰緊扭力定義
(1)圖示扭力。設計圖所指示的擰緊扭力(也稱之為設計扭力)。
(2)擰緊扭力。實際擰緊螺栓時,擰完后的擰緊扭力。
(3)檢查扭力。朝擰緊方向檢查擰緊螺栓得到的扭力值。
1.2 檢查扭力的測定方法
測定擰緊后螺栓的擰緊扭力:(1)用扭力扳手朝擰緊的方向測定;(2)測定螺栓開始移動時的扭力值。
螺栓移動時的扭力值:(1)即將到峰頂時叫作谷底扭力值;(2)沒有峰谷變化時叫作剛移動之后的扭力值。
1.3 檢查扭力的決定條件
(1)檢查扭力測定時的誤差(測定誤差):測定誤差。
(2)沿擰緊方向測定:測定的偏差。
扭矩槍緊固螺釘通過傳感器顯示的動態扭矩,而你用扭力板手檢測其松動扭矩,這時候你是檢測其靜態扭矩,這個扭矩比上面一個扭矩低很多。規范要求的一般為動態扭力。所以不能說明你這個扭矩不符合規范。建議你同時用扭力板手檢查螺栓滑牙時候的扭矩,如果這個扭矩小于規范,說明扭矩不在范圍內。
2 擰緊機的工作原理
2.1 擰緊機系統構成(圖1)
(1)應用集散體系理念,系統集中管理和分散控制。
(2)采用直接控制層、操作監控層、生產管理層三層結構。
(3)模塊化管理可靈活地配置成小、中、大系統。
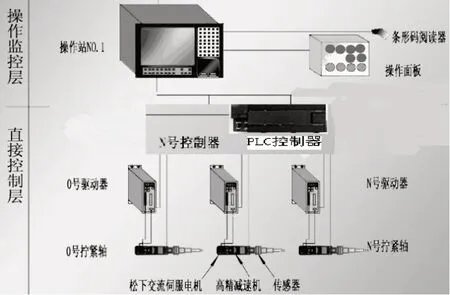
圖1
2.2 控制系統介紹
該套方案中的擰緊機控制系統采用開放式、標準化、模塊化和系列化設計,由過程控制級、控制管理級和企業管理級所組成的一個以通信網絡為紐帶的集中顯示操作管理,控制相對分散,具有靈活配置的多級網絡系統結構。并且系統控制權限逐級下放,每個擰緊軸的軸控單元都有獨立控制運行的能力,使得系統具有高可靠性、高實時性、高可用性、高精度,分布式數據庫實現全系統的信息采集和存儲,完善的統計過程控制體系保證了產品的質量。擰緊機設備主要由上位工控機、專用軸控制模塊、驅動執行單元和檢測單元等部分組成。驅動執行單元直接對螺栓進行擰緊等各種操作,并通過檢測單元把擰緊的過程變化量和狀態變化量反饋給控制單元;控制單元又與驅動執行單元連接,按照接受到的參數直接對其操作,并實時將擰緊軸的特性數據和采集到的實時數據傳遞給上位工控機,以便實現顯示、設定、存儲等。并實時將擰緊軸的特性數據和采集到的實時數據傳遞給上位工控機,以便實現顯示、設定、存儲等。
3 各主件分別進行介紹
3.1 監控操作站(工控機)
(1)監控操作站采用研華/研祥/華北工控生產的模塊化工作站。
(2)也可以根據客戶要求選定。
3.2 軸控制單元(PLC)
(1)軸控單元是選用國外進口知名品牌,本套系統的先進性、穩定性為國內領先水平,優于國內其他廠家,產品質量可比進口的電動擰緊軸品牌。
(2)顯示功能,扭矩、角度顯示以及合格、不合格、扭矩上下限等多種LED 指示燈
(3)具有電機接口、傳感器接口、電源接口,RS232 通訊接;控制器的小型輕量化:采用數字技術,體積輕巧,控制精準。融通性、靈活性:針對各種螺栓擰緊不同需要,實現多軸自由搭配選擇。
(4)聯網功能齊全:工業以太網,現場總線以及符合OPC 等協議數據傳輸。
3.3 擰緊機軸
電動扳手總成含電機、減速器、扭矩傳感器及動力輸出軸四部分,其中電機、傳感器為進口知名品牌,是擰緊機設備的主要核心部件。
行星減速器:(1)高精減速器采用三級行星減速;(2)有不同的扭矩區間可選,可選能力由(0 ~5)到(0 ~3000)N.m 多個品種;(3)密閉結構不需要維護添加潤滑油;(4)有多種結構直式,偏置箱式,直角式可選。
3.4 扭矩傳感器
(1)扭矩傳感器選用進口,是應用外國智能技術的工藝制作而成,將應變彈性片體在高標準的生產環境下制作,并高標準地保證了傳感器可靠性及抗蠕變特性。
(2)測量不確定度0.5%FS;供橋電壓:10 ~15V DC。
(3)適應環境溫度-20 ~60℃;頻率響應100μs;過載能力:120%;
(4)傳感器壽命:200 萬次不失精度。
3.5 動力輸出軸
(1)動力輸出軸是扭矩傳輸的終端元件,連接套筒后,可以直接接觸螺栓進行擰緊(如圖2)。
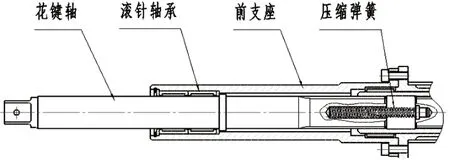
圖2
其特點如下:
(1)采用了模塊化設計和制造,如減速器、軸控模塊、控制系統及電控柜、操作體、懸掛裝置等,性能穩定、可靠。
(2)減速器采用2 級結構,擰緊軸的尺寸大大縮短,在水平使用時,無震動現象。
(3)輸出扭矩調整上,采用了一端調整方式,方便快捷。
(4)變位結構采用了直線導軌傳動裝置,變位準確可靠。
(5)設計上,考慮了人機工程的人性化設計,如操作體上的操控盒對稱分布兩側,便于操作。
(6)懸掛裝置采用平衡氣缸加導向結構,防止氣缸活塞轉動,保護了氣缸,移動平穩,安全可靠。導向部分為直線軸承+圓柱導軌結構,上下靈活。
(7)技術標準:采用了atlas-copco 公司的檢測標準,產品的精度及性能達到了atlas-copco 公司的標準。如康展的擰緊機設備,出廠前每臺都經過atlas-copco 公司儀器的檢測,合格后出廠。
(8)抗扭特性:擰緊機采用獨特的控制方式,可自動消減大部分擰緊時設備顫動現象。
雙量程扭矩標定:擰緊機配備大量程扭矩傳感器,傳統標定方式當擰緊機采用小扭矩擰緊時,會出現擰緊精度低的現象,我公司研發的雙量程標定形式,可對全量程拆分兩個區間段進行分別標定,提高小扭矩時設備應用精度。
