基于圖像識別技術的輸電線路智能監控系統應用①
2020-01-15 06:44:30徐振磊曾懿輝邵校嘉麥俊佳胡壯麗
計算機系統應用 2020年1期
徐振磊,曾懿輝,郭 圣,邵校嘉,麥俊佳,胡壯麗
(廣東電網有限責任公司 佛山供電局,佛山 528000)
隨著社會經濟的快速發展,各行各業對電力供應的質量和可靠性提出了更高的要求.由于輸電線路綿延幾十甚至上百公里,所處的環境具有不確定性,受所處地理環境和外部因素影響很大,輸電線路運行是否安全已成為電網可靠性的重要指標.室外環境中的桿塔及導線極易受外力破壞影響,造成線路跳閘、人身傷亡等事故.特別是近年來,各地建筑物的建設和改造頻繁,由此產生的線路事故逐年增加,傳統的巡視方法無法滿足現有的安全需求.
傳統的輸電線路巡視主要依靠運維人員周期性巡視,雖能發現設備隱患,在巡視周期真空期也不能及時掌握線路走廊的現場變化,極易在下一個巡視未到之前由于缺乏監管發生線路事故.因此,可以對輸電線路進行實時監控的智能監控系統應用而生.經研究,現有的監控系統設備存在在線率低,持續監控性能差,大量監控圖像需耗費人工進行判別的缺點[1–3].這些問題造成監控系統運行成本高、消耗后臺人力資源,制約了輸電線路在線監控系統的應用和大規模發展[4].
本文通過卷積神經網絡算法進行模型訓練,基于大量現場運維數據,得到一種可靠的輸電線路外部隱患識別模型.將該模型應用在輸電線路在線監控系統中,實現了智能化識別隱患的功能.該系統可以對于輸電線路中存在可能危害線路運行的吊車、挖掘機等多種類別的大型施工機械進行識別,發現隱患后自主上報.經實際工作驗證,該系統高效可靠,提高了輸電線路安全經濟運行的管理水平,并為輸電線路的智能化運維模式提供必要的參考.
1 輸電線路智能監控系統結構
1.1 系統功能介紹
輸電線路智能監控設備一般安裝在輸電線路桿塔塔身上,在一定高度上對輸電線路周圍環境進行監控,通過通信鏈路將采集的視頻及圖像信息上傳至系統服務器.系統服務器通過調用圖像識別程序,對回傳的數據進行實時判定分析.當識別發現輸電線路走廊內存在會對輸電線路產生危害的大型施工機械時,就會觸發報警程序,系統將會對該隱患進行標注,并將相關信息自動報送給相應的運維工作人員.若輸電線路走廊內不存在隱患,圖像識別程序將判定線路環境正常,不會觸發報警程序.系統會將監控設備采集的視頻流及圖像數據進行存檔,并以一定的時間間隔截取圖片,推送至企業微信公眾號,工作人員可以通過系統后臺直接訪問,或者通過微信客戶端進行查看,以便根據實際需要實時動態掌握施工現場信息.系統邏輯流程圖如圖1所示.
1.2 智能監控系統組成
智能監控系統分3個部分組成:塔上監控設備、通信系統、后臺存儲與數據處理平臺.
塔上監控設備實現對輸電線路桿塔現場圖像以及相關環境參數的采集.包括監控攝像頭、供電模塊、控制芯片(視頻采集卡以及其他傳感器控制芯片)、通信天線,如圖2所示.
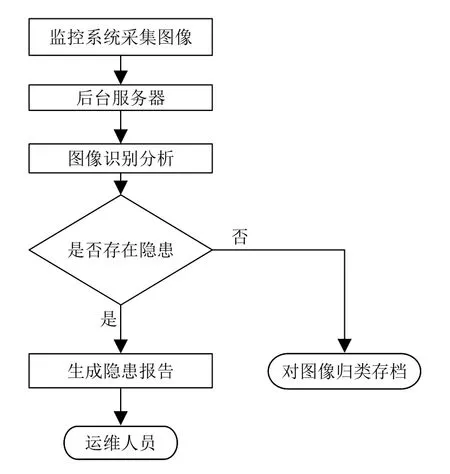
圖1 智能監控系統邏輯流程圖

圖2 塔上監控設備結構示意圖
通信系統實現前端監控設備與后臺系統服務器的雙向通信,包括視頻(圖像)回傳及控制指令傳輸等功能.通信系統由工業路由器和4G無線網卡配置組成,在本系統中采用4G無線傳輸,監控攝像機將視頻編碼處理后的圖像進行壓縮、封裝后再通過4G無線傳輸模塊傳送至后臺終端服務器.這種方式保證了數據傳輸質量和速度.
后臺存儲與數據處理平臺實現對現場采集數據的實時分析,并依照設置好的規則對數據進行存檔或推送功能.作為整個智能監控系統的核心部分,數據處理單元調用圖像識別模型對收集的數據進行實時分析,對分析的數據進行統一歸檔存儲.同時,將發現的問題分層、分組推送至相關的運維人員,時效性、針對性更強.
1.3 系統功能的實現
智能監控系統的前端監控設備安裝在線路周邊有大型機械施工的桿塔上,對整個施工現場的情況進行視頻采集存儲、圖像等數據傳輸.監控系統后臺服務器對接收到的圖像信息進行實時識別和分析處理,通過對圖像特征值的提取、分析,實現對大型機械的判別和預警.一旦系統識別出大型機械闖入線路保護區,就會觸發預警程序,自動將相關信息報送運維人員.若未發現大型機械入侵時,后臺程序將按照預先設定的間隔對監控視頻進行抽幀,并將每幀圖像上傳至服務器,服務器依據設定好的存儲邏輯將圖片歸類并自動存檔,同時提供一個外部訪問端口,以便運維人員可以根據需要對數據進行查看,全方面掌握施工現場信息.監控系統結構如圖3所示.
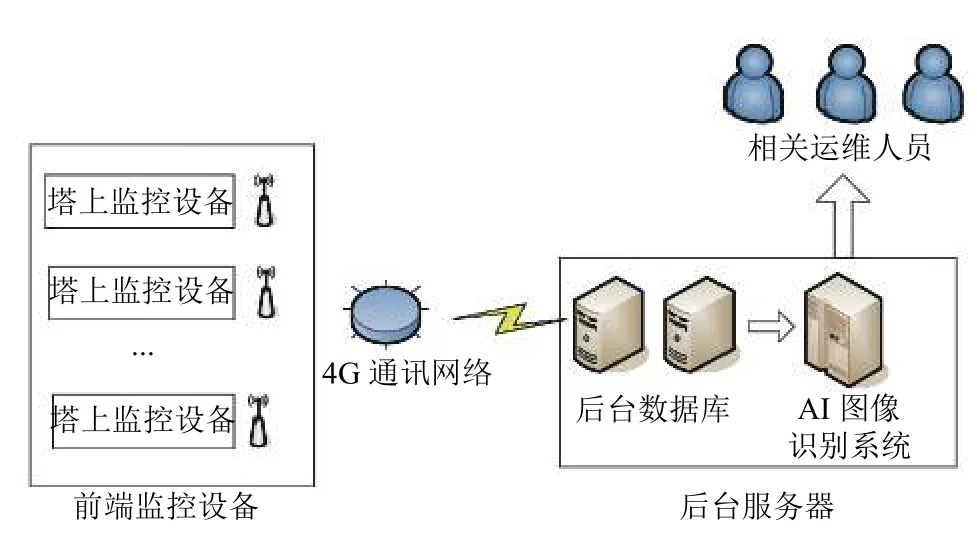
圖3 智能監控系統結構圖
(1)安裝在輸電線路桿塔上的前端監控設備采集圖像信息;
(2)圖像數據通過4G信號上傳到后臺服務器;
(3)后臺服務器調用圖像識別模型,并返回相關參數,服務端做分析記錄;
(4)在識別發現輸電線路存在安全隱患時,自動向相關運維人員上報.
2 智能監控系統關鍵技術
2.1 圖像識別核心算法分析
利用計算機對圖像信息進行分析、處理以及理解的技術稱為圖像識別技術,是當今計算機視覺領域一個重要的研究方向,對以圖像為主要研究對象的智能化數據分析有著十分重要的作用和影響[5,6].
圖像的特征提取和分類一直作為圖像識別領域的基礎而重要的研究方向.在處理二維的圖像數據上,卷積神經網絡(Convolutional Neural Network,CNN)提供了一種端到端的學習模型,能夠自動地學習低層和高層特征并在各類的數據集上得到了很好的結果[7,8].模型參數通過梯度下降方法進行訓練,通過對圖像特征的提取和分類,完成對圖像的識別.作為深度神經網絡中應用最多的網絡模型,卷積神經網絡的特點在于通過共享權值的卷積核得到每一層的特征值,由于這種特殊結構,他更適合于解決圖像特征的學習和表達[9].
卷積神經網絡是一種多層的人工神經網絡,用以處理輸入的二維數據.一般由輸入層、激勵函數、連接層、卷積層、聚合層等層結構組成.如圖4所示,一個簡單的神經網絡模型的結構分為多層.每層中又有多個獨立的神經元構成,同一層的神經元之間沒有連接,相鄰的兩層中的神經元互相連接[10].其中,C1,C2表示兩個卷積層,S1,S2表示兩個子采樣層.

圖4 CNN網絡結構模型示意圖
在卷積神經網絡模型中,輸入的原始圖像稱為X.用Ci表示卷積神經網絡第i層的特征圖(C0=X).假設Ci是卷積層,Ci的產生過程可以描述為:

其中,運算符號“? ”代表第i?1層圖像或者特征圖與卷積核進行卷積操作,Wi表示第i層卷積核的權值向量;卷積的輸出與第i層的偏移向量bi相加,之后通過非線性的激勵函數f(x)得 到第i層 的特征圖Ci.
在卷積層之后一般進行子采樣操作,該過程依據一定的采樣規則對特征圖進行采樣.假設Si是子采樣層:

子采樣層的主要功能有兩點:1)對特征圖進行降維;2)在一定程度上保證特征的尺度不變特性.
在卷積層和子采樣層的交替傳遞后,卷積神經網絡的連接層對提取的特征進行分類,得到基于輸入的概率分布Y(li表 示第i個標簽類別).如式(3)所示,卷積神經網絡的實質是對原始圖像(C0)進行多個層次的數據變換和降維,從而得到一個新的特征表達(Y)的過程.

在模型訓練中,需要得到參數W和b關于損失函數的梯度.前一層的殘差與后一層的殘差通過鏈式法則求得,也就是利用已有的梯度計算下一層的梯度,這個過程正是誤差反向傳播的核心.計算得到的梯度如式(4),式(5)所示:

其中,學習速率參數 η用于控制殘差反向傳播的強度.
這樣,對于一個原始的圖像,就可以通過卷積神經網絡提取出相應的特征值并進行分類識別,從而完成對圖像信息的讀取.這個過程,正是圖像識別工作的核心步驟.
2.2 輸電線路外部隱患的物體檢測技術
為滿足輸電線路智能監控的需求,單純的提取圖像特征,然后基于卷積神經網絡模型進行圖像識別并不能滿足實際需求.相比圖像分類,物體檢測是圖像識別領域中一個更復雜的問題,因為一張圖片中可以包含多種物體的信息,將各個物體準確提取并分類就需要首先識別物體所在位置[11–13].結合輸電線路中的應用場景,物體檢測要分析出監控畫面中存在的物體種類以及具體的坐標位置.基于CNN技術的物體檢測模型一般將問題分解為如何提取候選區域和對候選區域進行分類的兩個子問題.
提取候選區域是物體檢測模型訓練的必備步驟,相較于GPU上更快的運算速度,由于該算法是在CPU上實現的,所以計算候選區域成為了整個模型運算時間的瓶頸.在各種候選區域的計算方法中,應用滑動窗口技術的Faster R-CNN網絡是較為優秀的模型.
Faster R-CNN網絡在傳統模型的基礎上,在最后一層輸出特征值上設置一個滑動窗,將滑動窗和候選區域網絡全連接.模型以滑動窗中心為中點,給定若干個不同尺度和長寬比的錨點,根據每個錨點生成相應的候選區域,隨著滑動窗口滑過圖像中的每個位置,完成對整個圖像的掃描[14–16].如圖5所示,候選區域是全卷積網絡,滑動窗口的輸入特征映射到一個低緯度向量,并將該向量輸入到兩個并列的全連接層,其中分類層包含該向量是物體還是背景的概率分布信息,回歸層包含候選區域坐標信息.
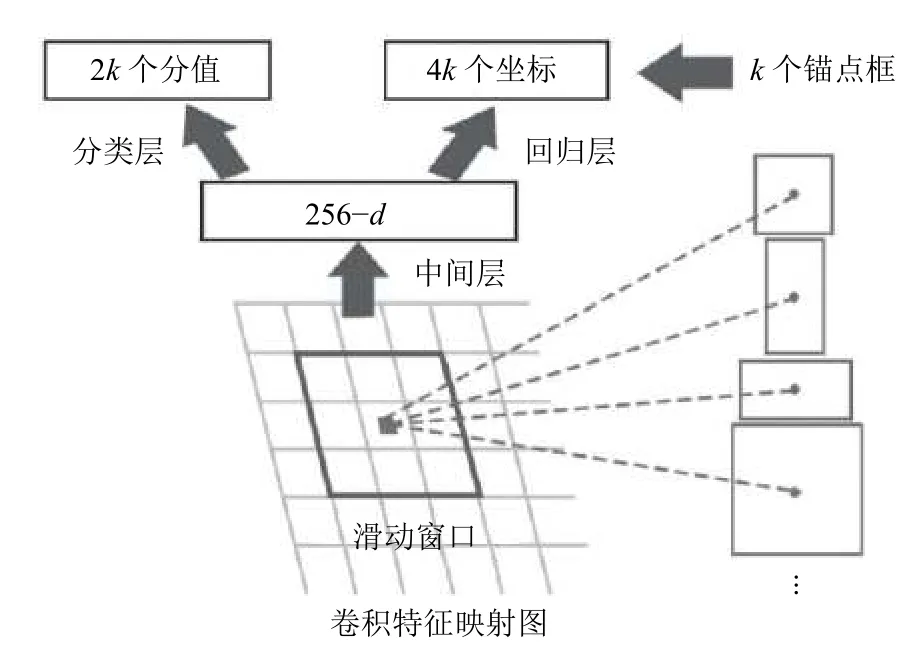
圖5 滑動窗口提取候選區域
通過上述方法可以完成候選區域的提取,然后將每個待分類的候選區域輸入到卷積神經網絡中提取特征,接著將這些特征通過CNN算法中進行分類[17,18].整個過程如圖6所示,通過提取候選區域以及對候選區域進行分類兩步操作,從而實現對圖像中的物體檢測.
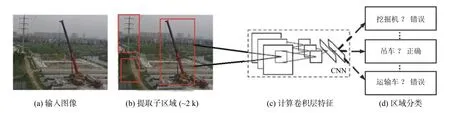
圖6 輸電線路外部隱患物體檢測流程
3 輸電線路智能監控應用實例
基于圖像識別技術的輸電線路智能監控系統是一套可以智能識別輸電線路外部隱患的監控系統,實現對輸電線路周圍環境的實時監控,發現隱患時自動識別上報.該系統的應用可以改變人員前往現場進行巡視的傳統運維模式,用機器代替人,有效提高輸電線路運維效率.下面就佛山地區應用該系統的效果進行說明.
3.1 圖像識別模型的訓練
基于卷積神經網絡的深度學習算法,在系統應用前需要訓練好相應的圖像識別模型.經統計佛山地區近十年的輸電線路外力破壞事件,事故原因基本為吊車、挖掘機、樁機和大型運輸車輛的碰撞引發.故在此次的訓練中,提取了以往監控照片中存在外部隱患的典型照片約3000張,包含桿塔、吊車、挖掘機、樁機和大型運輸車輛五個類別.經過圖像分類、圖像標注,制作出標準格式的數據集,輸入識別模型進行訓練.訓練結束后檢驗結果,測試該模型識別能力mAP是否達標.若不達標,調整數據集再次訓練模型.經過多次迭代,最終生成合格模型.表1是本次實例中進行訓練的圖像識別模型各項指標.其中,精確率為正確預測的物體數與預測物體總數之比,表示模型對圖像中單個物體的判別準確度;召回率為正確預測的物體數與真實物體數之比,表示模型對圖像中物體數量的敏感度.mAP結合準確率和召回率,是表示圖像識別模型的總體指標.
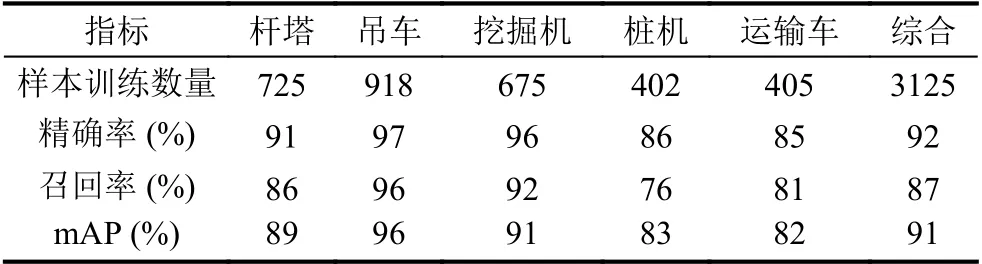
表1 圖像識別模型的各項指標
3.2 塔上設備的布點安裝方式
該智能監控系統主要針對大型機械入侵預警,因此布點主要是選擇有外力破壞隱患、重要交叉跨越、保供電的重要線路區段的桿塔上[19,20].針對不同的桿塔類型(角鋼塔、鋼管塔、鋼管角鋼組合塔)設計配套支架和夾具.安裝工作3人一組,地面1人,塔上2人即可完成全部設備安裝.塔下組裝設備,塔上微調固定,地面調通測試,接入后臺智能監控系統.整個設備安全接入可在1 h內完成.
3.3 應用效果
以佛山電網為例,已安裝部署塔上監控設備300余套,對存在較大外力破壞隱患的區域進行監控.這些設備會對現場環境進行實時監控,通過通信鏈路將采集的視頻及圖像信息上傳至系統服務器.系統服務器通過調用圖像識別程序,對回傳的數據進行實時判定分析,識別準確度達到90%以上.當識別發現輸電線路走廊內存在會對輸電線路產生危害的大型施工機械時,就會觸發報警程序,系統將會對該隱患進行標注,并將相關信息自動報送給相應的運維工作人員.通過安裝攝像頭遮雨板和使用專用夾具固定等措施,該智能監控系統持續穩定運行,經受住了暴雨、臺風等惡劣天氣的考驗.識別效果如圖7.

圖7 識別效果圖
相較于傳統的人員前往現場進行巡視的方式,輸電線路智能監控系統實現了智能巡檢的目標,在不借助人員的情況下,自動監控現場,自主推送隱患,解放了大量人力.由于系統可對現場持續監控,后臺通過調用圖像識別程序對現場狀態進行實時分析,將傳統的一日一巡或三日一巡的人工方式提升至實時監控,在減少人員工作量的同時,顯著提高了對現場的監管水平.
4 結語
物體檢測是輸電線路智能監控系統的關鍵技術.首先對輸入圖像進行分割,完成候選區域的提取,然后將每個待分類的候選區域輸入到卷積神經網絡中提取特征,接著依據特征進行分類,最終得到物體種類以及具體的坐標位置.應用該技術的圖像識別模型可以智能識別出輸電線路現場環境中的安全隱患.
輸電線路智能監控系統建立起前端采集圖像,數據無線傳輸,后臺識別分析,隱患定向推送的智能監控新模式.可以對輸電線路現場進行24小時持續監控,通過后臺調用圖像識別程序對現場情況進行實時分析,自動推送隱患預警.大幅度提高了監管預防大型機械外力破壞的效率和質量,提高了輸電線路運行安全.
猜你喜歡
童話王國·奇妙邏輯推理(2024年5期)2024-06-19 16:03:38
工業設計(2022年8期)2022-09-09 07:43:20
軍民兩用技術與產品(2021年10期)2021-03-16 06:05:30
北京測繪(2020年12期)2020-12-29 01:33:58
中學生數理化·七年級數學人教版(2020年10期)2020-11-26 08:24:50
數學物理學報(2020年2期)2020-06-02 11:29:24
文苑(2018年23期)2018-12-14 01:06:06
文苑(2018年19期)2018-11-09 01:30:14
文苑(2018年17期)2018-11-09 01:29:26
文苑(2018年21期)2018-11-09 01:22:32
