讓行行人條件下交叉口機動車運行特性研究
2020-01-16 09:55:50楊曉芳周磊磊上海理工大學管理學院上海200093
物流科技 2019年12期
楊曉芳,周磊磊 (上海理工大學 管理學院,上海 200093)
0 引 言
交叉口是城市道路的重要節點,其運行狀態與運行效率嚴重影響城市道路網的效率。機動車、非機動車與行人間存在的相互干擾和交通沖突嚴重地影響了交叉口的運行效率與交通安全。讓行規則的實施方便了行人通過交叉口。因此,在讓行條件下,交叉口的通行能力怎么改變,現有的控制方法是否適用亟待研究。交叉口人車沖突問題早在20世紀就受到了國內外學者的廣泛關注,目前國內外已有不少學者對交叉口人車沖突問題進行了研究。在對交叉口的沖突分析方面,胡宏宇[1]利用視頻圖像處理技術提取了交叉口人車沖突基本數據,確定了人車沖突安全等級;劉洋[2]通過視頻拍攝獲取數據,并將機非沖突劃分為4種類型;Stipancic[3]統計了7個交叉口的視頻數據并分析了機非沖突的嚴重程度。以上研究在分析交叉口沖突時考慮的因素較為單一,而且針對行人與非機動車運動特征的分析相對較少。在建立人車沖突模型方面,韓印等[4]基于行人過街消散特性建立了人車相互沖突模型;鮑怡婷等[5]人研究了右轉行人與車輛的沖突模型,分析了人車沖突機理;陸斯文等[6]分析了單車道行人激進過街與機動車之間的碰撞過程,建立了沖突和碰撞事故概率模型;劉博通[7]提出過街行人與駕駛員的碰撞風險概率模型。以上模型較少考慮到過街行人受到的外界影響因素,且對過街行人的運動規則研究不足。在交叉口人車沖突讓行機理研究方面,元胞自動機模型因為其演化規則簡單,易于實現且能有效模擬人車微觀運動的狀態得到了廣泛的運用[8-10]。其中,Chai等[11]發現利用元胞自動機建立的該模型能夠更加有效地評價交叉口車輛運行沖突;孫澤等[12]構建出可以刻畫行人和機動車的相互干擾行為的元胞自動機模型。
上述交叉口人車沖突讓行機理方面的研究,從以往單一的行人或機動車的角度向綜合考慮人車交互行為對讓行機理研究的影響角度轉變,但是針對機動車禮讓行人這一行為考慮的較少。然而隨著交通法規的逐步完善、執法力度的逐步加強,禮讓行人的規定逐步得到了落實,讓行條件下的交叉口通行能力及控制方法都亟待研究。因此,本文將在禮讓行人條件的基礎上,建立描述人車交互行為的交通模型,研究交叉口機動車的讓行機理。
1 交叉口人車沖突分析
本文對城市信號交叉口的不同相位、不同車道組內機動車、行人二者間的相互影響進行了調查分析。統計結果顯示,城市信號交叉口普遍存在3種類型的人車沖突。交叉口行人與機動車的沖突如圖1所示。
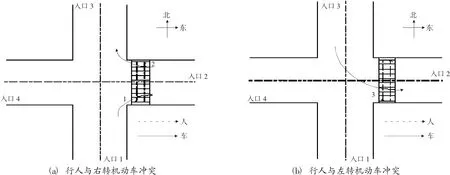
圖1 交叉口行人與機動車的沖突
為了使所調查的數據更加符合讓行行人條件,在實際的調查過程中盡量選取有交警指揮的交叉口。最終選取了上海市長陽路與隆昌路交叉口作為本次的調查地點,并且記錄了該交叉口10天早高峰時段的人車沖突數據,上海市長陽路與隆昌路交叉口早高峰時段人車沖突調查如表1所示。

表1 上海市長陽路與隆昌路交叉口早高峰時段人車沖突調查
由表1,通過分析調查數據發現,沖突區1有31.2%的讓行車輛選擇停車讓行,沖突區2有87.5%的讓行車輛選擇停車讓行,沖突區3有10.7%的讓行車輛選擇停車讓行。綜上所述,交叉口行人與機動車發生沖突時,機動車一般采用減速讓行與停車讓行的混合方式讓行行人。

表2 行人通過交叉口后的運動方向人數統計
由表2,當行人與右轉車輛沖突,行人在通過人行橫道時,由于受到人行橫道周圍存在的公交站點、商場等交通吸引點的影響,有80個人向北方向運動,94個人向東南方向運動,向南與東北方向運動的行人相對較少,行人在人行橫道上的分布趨勢呈兩條相互平行的反向行人流;當行人與左轉車輛沖突時,行人在通過人行橫道時,有71個人向東南方向運動,向南、北與東北三個方向運動的人數大致相同,且與東南方向的人數差相對較大,向東南方向運動的行人形成一條較為明顯的單向行人流。綜上所述,人行橫道周圍存在交通吸引點時,過街行人的運動方向因受到交通吸引點的影響會具有偏向交通吸引點的趨勢。
2 讓行行人條件下的元胞自動機模型
2.1 建模思路
模擬信號交叉口人車交互運行的仿真平臺很多,如VISSIM,Synchro和元胞自動機等。與VISSIM,Synchro相比,元胞自動機能夠更加精細地模擬人車行為[13]。讓行行人條件下的元胞自動機模型是建立在元胞自動機的理論基礎上,結合行人流模型與機動車流模型,研究交叉口讓行行人條件下車輛讓行機理的一種模型。
2.2 模型建立
2.2.1 行人過街規則
傳統Blue雙向行人流模型下的行人運動規則只包含了換道、向前運動及交換位置,并沒有考慮到行人運動軌跡還會受到交通吸引點的影響。通過上述的調查研究發現,人行橫道周圍存在公交站點、商場等交通吸引點時,行人在人行橫道上的行走方向更加偏向于交通吸引點。據此,本文假定此時行人的位置為(i,j),i表示元胞所在行,j表示元胞所在列,行人的速度(m/s) 記為最大速度 (m/s)記為則從t(s)到t+1(s)時間步,行人的運動規則如下。
(1) 換 道
①存在交通吸引點:行人受到人行橫道周圍交通吸引點的影響后,會產生換道行為。如圖2所示,假設交通吸引點位于人行橫道對面的左側位置。當(i,j)位置的行人前方有行人阻礙且左右兩側臨近的元胞為空時,行人會以較大的概率pl向左換道,換道位置更新為xi=xi-1。反之以較小的概率1-pl向右換道,換道位置更新為xi=xi+1;當(i,j)位置的行人前方與右側臨近的元胞被占據時,行人同樣選擇向左換道,換道位置更新同理;當(i,j)位置的行人前方與左側臨近的元胞被占據時,即使左前方存在交通吸引點,行人仍然選擇向右換道,換道位置更新同理。

圖2 行人換道
②不存在交通吸引點:行人在不受到人行橫道周圍交通吸引點的影響時,當行人臨近的元胞為空,行人考慮換道,計算并選擇條件較好的路徑,此時行人的換道位置更新為:

式中:xi為人行橫道橫坐標元胞數為第(i-1,j)位置前方的空元胞數為第(i,j)位置前方的空元胞數為第(i+1,j)位置前方的空元胞數。如果兩個平行的行人期望占據同一個元胞,那么這兩個人占據的機會相等。
(2) 向前運動
(3) 行人沖突
行人與對向行人發生沖突時,通過與對向行人交換位置完成更新,此時行人的位移減少一個元胞長度,行人的位置更新為
式中:xPn(t+1)為t+1(s)行人的元胞位置,(t)為t(s)行人的元胞位置,(t+1)為t+1(s)行人的速度 (m/s)。
2.2.2 機動車運行規則
(1)無行人干擾下的機動車運行規則
在機動車模型中,以1×n的離散格子表示一條道路,由于是1×n的格子,所以個體元胞只有前后兩側的元胞作為鄰居,作為一輛汽車則不能與前后車發生追尾。此外每個元胞或者是空的,或者被一輛車占據,當元胞被一輛車占據時,車的速度(km/h) 可以取
①右轉機動車運行規則
當車輛n即將到達交叉口,此時車輛的速度(km/h)為(t),由于右轉彎半徑相對較小,車輛必須減小速度以保證行車安全,車輛的剎車燈亮起,bn(t)=1,減速后的車輛速度(km/h) 為(t+1),車輛的位置更新為受到前車n的影響,后車n+1從t(s)到t+1(s)時間步的運行規則如下。
a.確定車輛n+1的隨機慢化概率p,在保證前后車輛的時間車頭距th小于安全時間間距ts的前提下,p=p

式中:bn是車輛n的剎車燈狀態,bn=1(0)表示剎車燈的亮(滅);th=dn/vn(t)是車輛的時間車頭距(s/veh);ts=min表示安全時間間距(s);h表示剎車燈的影響范圍(m)表示前車n的期望速度表示前車n在t+1(s)的速度 (km/h);vCn+1(t+1 )表示后車n+1在t+1(s)的速度 (km/h)(t)表示后車n+1在t(s)的位置(t+1)表示后車n+1在t+1(s)的位置。
當車輛n和n+1進入交叉口后,車輛的速度都得到了一定程度的降低,如果沒有特殊情況發生,車輛均保持著相對較低的速度勻速行駛。
當車輛n即將通過交叉口時,剎車燈關閉,車輛處于加速狀態,加速后的車輛n速度為位置更新為受到前車n的影響,后車n+1從t(s)到t+1(s)時間步的運行規則如下。

②左轉機動車運行規則
當左轉相位的綠燈亮起時,左轉車輛n啟動并進入交叉口,此時車輛處于加速狀態。實際調查表明,右轉車輛的加速較為平緩,加速后的車輛速度相對較低。車輛n加速后的速度為受到前車n的影響,后車n+1從t(s)到t+1(s)時間步的運行規則如下。

當左轉車輛通過交叉口后會再次加速,此時車輛的速度與位置更新規則和上述情況的更新原理相同,這里不再贅述。
(2)有行人干擾下的機動車運行規則
有行人干擾下的機動車運行規則總體上可以劃分為減速讓行和停車讓行。
①減速讓行
當車輛n選擇以減速讓行的方式讓行行人,行人供車輛穿插的間隙gap(m)大于臨界值gap1(m)時便進入沖突區。從t(s)到t+1(s)時間步,車輛n的運行狀態更新如下:

車輛通過沖突區后,開始緩慢加速。從t(s)到t+1(s)時間步,車輛n的運行狀態更新如下:

②停車讓行
當車輛n選擇以停車讓行的方式讓行行人,駕駛人在發現人行橫道上的行人時距離沖突區為d1個元胞。如果沖突區內有行人或下一刻行人會進入沖突區,車輛減速停靠在接近人行橫道的位置。t(s)到t+1(s)時間步,車輛n的運行狀態更新如下:

如果車輛n在減速后依舊找不到存在大于臨界值gap1(m)的穿插間隙,此時車輛距離行人為d2個元胞,車輛進行二次減速并停車。從t(s)到t+1(s)時間步,車輛n的運行狀態更新如下:

在某一時刻,行人供車輛穿插的間隙gap(m)大于臨界值gap1(m)時,車輛啟動。從t(s)到t+1(s)時間步,車輛n的運行狀態更新同公式(3)。
3 仿真結果分析
按照上文建立的人車讓行元胞自動機規則,編譯元胞自動機源代碼并仿真分析人車讓行條件下的仿真結果。如圖3所示。
由圖3,在不受行人與非機動車干擾的情況下,右轉車輛速度變化較左轉車輛速度變化更加明顯。這是由于右轉彎半徑相對較小,車輛必須減小速度以保證行車安全,而左轉彎半徑一般較大,車輛不需要減速以適應轉彎運動的需要,所以左轉車輛運行速度比較穩定,沒有出現較大的波動。轉向車輛在通過沖突區的過程中,其平均速度呈先減小后增大的趨勢。在其他影響變量不變的情況下,隨著受交通吸引點影響的過街行人比例增加,轉向車輛在通過沖突區的過程中,速度逐漸降低。對比圖3(b)、(c)、(d),在受交通吸引點影響的行人增加相同比例的情況下,沖突區2的車輛速度變化較大,沖突區1的車輛速度變化次之,沖突區3的車輛速度變化較小。
綜合分析所有仿真結果,并結合沖突區車輛停車讓行比例與減速讓行比例可知,在受交通吸引點影響的過街行人比例相同情況下,停車讓行較減速讓行對沖突區車輛速度變化趨勢的影響更大。
4 結束語
(1)通過對城市交叉口的實際調查,總結了交叉口主要存在的人車沖突方式。在對行人過街的路徑分析基礎上,提出了過街行人會受到人行橫道周圍存在的交通吸引點的影響這一觀點。
(2)通過對讓行行人條件下的元胞自動機模型的仿真結果分析發現,受到交通吸引點影響的過街行人比例相同的情況下,停車讓行較減速讓行對沖突區車輛速度變化趨勢的影響更大。
(3)本文主要研究了十字交叉口的人車讓行機理,針對其它類型交叉口的人車讓行研究還比較欠缺,在以后的研究中需要加以考慮。

圖3 受影響行人比例與車輛速度關系