基于ANSYS三相異步電機實驗平臺設計
2020-01-20 05:30:30劉杰吳凡夫梅建偉
科技風 2020年22期
關鍵詞:仿真
劉杰 吳凡夫 梅建偉
摘要:課題利用ANSYS軟件建立了三相異步電機仿真模型,對物理環境、定子/轉子等模型建立以及單元屬性類別等涉及到三相異步電機建模的幾個關鍵要素進行了詳細的闡述,利用matlab建立了異步電機轉子磁場定向矢量控制系統模型,分析了ANSYS與matlab的協同仿真技術。實驗結果表明,該實驗平臺使得抽象的概念更加清晰直觀,滿足了電機實驗系統的要求。
關鍵詞:ANSYS;三相異步電機;建模;仿真
傳統電機的設計中開發和實驗周期長成本高,而現代電機由于磁極形狀、齒槽分布等復雜多樣,使得磁路十分復雜,使得經典的電機設計及其實驗方法已經不能滿足需要。針對電機設計和實驗中的核心問題,采用ANSYS軟件建立異步電機定子/轉子等模型,與其他軟件協同仿真,準確地計算出電機的磁場分布、電感、力矩等,分析電機的散熱、機械特性以及電磁性能[1]。
1 ANSYS三相異步電機實驗平臺
ANSYS電機及控制系統集成化設計方案可解決電機本體及控制系統的快速設計、方案優選和電機精確電磁性能分析等問題。用戶還可根據需要,補充結構、噪聲分析等軟件,即可實現單向或雙向的電機多物理域協同設計、高精度電機及控制系統集成化設計等[2]。
三相異步電機實驗系統包括:異步電機本體和控制系統建模、協同仿真技術以及實驗結果分析和處理。基于ANSYS的異步電機建模的實質是在計算機中運行電機,主要分為前處理(建模)、網格劃分、加載設置求解以及后處理。建模可以使用GUI控制流或者命令流,首先建立異步電機的各單元,比如定子鐵心、定子繞組、轉子等,再對每一部分進行劃分網格和單元類型定義,保證電機建模的完整性。
2 異步電機建模步驟
2.1 物理環境的創建
物理環境的創建主要包括定義工作標題、定義文件工作名、定義分析類型、進入前處理、異步電機定子和轉子基本參數設置、參數和單元類型定義以及組件特性定義。
本文主要采用命令行語句對定子、轉子等結構進行定義,主要命令行語句為:定義鐵心外徑outer_stator=1400/1000,定子槽數nslot_stator=72,相數m_phase=3,極數n_pole=4,導線寬度ss_clw=16/1000,并繞導線根數ss_clh=4/1000等。
對單元類型進行定義,主要包括AZ自由度用于空氣和絕緣區域et,1,53,0,AZ自由度用于轉子槽內導條et,3,53,1等。
對材料參數進行定義,主要包括空氣導磁率:mp,murx,1,1,定子導體導磁率:mp,murx,2,1,定子導體電阻率:mp,rsvx,2,0.0434e6。
2.2 定子/轉子幾何模型創建
物理環境、結構參數等設定完成后,再創建72個定子槽,調用csys命令,將坐標變化為極坐標,每個定子槽間隔4.8度。將生成的組件鐵芯和定子槽區域相減,便得到完整的定子鐵芯。以定子鐵芯內徑減去氣隙的半徑,和定子鐵芯的外徑形成一塊同心圓的區域,選定這個區域和定子鐵芯相減,就可以得到氣隙。創建轉子的幾何模型的步驟與建立定子幾何模型的步驟相似,重復上述定子鐵芯建模的步驟,在命令行語句中按照轉子鐵芯以及繞組的尺寸和參數進行重新定義[3]。
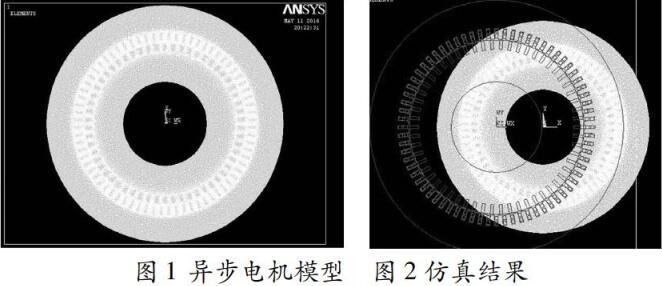
2.3 單元屬性類別
在建立異步電機各個部分組件的基礎上,對各個組件部分的單元屬性類別進行劃分和定義,在執行命令以后,就可以得到異步電機的仿真模型和仿真結果,如圖1、2所示。
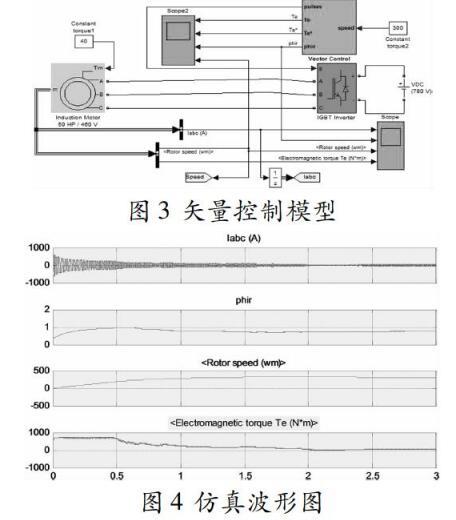
3 協同仿真技術
在Matlab中建立好異步電機矢量控制模型,在進行聯合仿真之前,首先將Simplorer文件中的AnsoftLinkDialog、AnsoftSFunction.dll、AnsoftSFunction.h加載到Matlab的掃描路徑中,完成Matlab的相應設置。設置完成后,在Simplorer創建相應的工程和進行配置后就可以進行聯合仿真[4],仿真模型和波形如圖3、4所示。
4 結語
利用ANSYS軟件建立了三相異步電機的定子、轉子和氣隙模型,并且利用ANSYS軟件工具對其電磁場分布情況進行了仿真,通過與其他電機控制應用軟件相結合,可以對三相異步電機機電控制系統進行協同仿真,該虛擬實驗平臺的建立不僅能夠促進學生對電機及其結構的深入了解,而且還能為電機設計以及性能分析打下堅實的基礎。
參考文獻:
[1]趙魯.基于Simplorer場路耦合多物理域聯合仿真[M]].北京:中國水利水電出版社,2014.3.
[2]胡仁喜.ANSYS13.0電磁學有限元分析從入門到精通[M].北京:機械工業出版社,2012.1.
[3]夏正澤.基于場路耦合法的異步牽引電機電磁場分析[J].微電機,2009.3(24).
[4]]劉雪梅,倪澤浩,李愛平.基于ANSYS的大型異步電機轉子系統動態特性分析[J].中國工程機械學報,2013,06:480484.
猜你喜歡
中國教育技術裝備(2016年20期)2016-12-12 10:09:15
中小企業管理與科技·下旬刊(2016年10期)2016-11-18 20:57:34
科技資訊(2016年18期)2016-11-15 20:09:22
科技資訊(2016年18期)2016-11-15 07:55:28
價值工程(2016年29期)2016-11-14 02:01:16
電子技術與軟件工程(2016年18期)2016-11-14 00:46:54
數字技術與應用(2016年9期)2016-11-09 23:25:33
數字技術與應用(2016年9期)2016-11-09 22:09:07
科技視界(2016年18期)2016-11-03 21:44:44
科技視界(2016年18期)2016-11-03 20:31:49
