離子推力器柵極組件熱態間距測量系統研制*
2020-02-07 12:58:36袁杰紅周仕明肖勢杰李興坤楊俊泰
國防科技大學學報 2020年1期
袁杰紅,梁 棟,周仕明,肖勢杰,李興坤,楊俊泰
(1. 國防科技大學 空天科學學院, 湖南 長沙 410073;2. 蘭州空間物理技術研究所真空低溫技術與物理國家級重點實驗室, 甘肅 蘭州 730030)
LIPS-300是蘭州空間技術物理研究所自主研制的一款直徑為300 mm的高功率、高推力、多模式柵極離子推力器,專為中國新一代大型桁架式衛星平臺設計。柵極組件是柵極離子推力器的關鍵部件,LIPS-300柵極組件為三柵極結構,由三片球面多孔柵極組成,柵極通過安裝環固定在總環上,室溫下柵極安裝間距為1.25 mm。離子推力器電離室工作后,來自電離室的熱輻射和等離子的能量沉積會迅速加熱柵極,并且使柵極中心溫度高、邊緣溫度低,溫度場沿柵極徑向對稱,近似成二次曲線分布[1](屏柵中心溫度可達400~500 ℃,邊緣溫度比中心低100~300 ℃[2])。柵極受熱膨脹,內部產生彎曲應力和拉伸應力導致球面結構產生變形,其一階熱變形固定為沿球半徑向外突出,在柵極中心處產生最大熱變形[3]。工作時,屏柵中心的溫度比加速柵中心溫度高50~100 ℃[2],屏柵熱變形量大于加速柵變形量,導致柵極熱態間距減小。柵極間距減小將影響離子束流的發散角、推力大小,增大電子返流閾值、加重柵極腐蝕[4-6],更嚴重的是會增大柵極打火概率,甚至接觸短路導致推力器關機[7-8]。所以需要對柵極熱態間距的變化量進行測量,掌握其變化規律,在國外,美國國家航空航天局(National Aeronautics and Space Administration, NASA)的MacRae[9]利用帶探頭的高精度步進電機,通過接觸測量了雙柵極的熱變形,測量精度為25 μm。美國噴氣推進實驗室的Trava-Airoldi[10]設計了一種基于氦氖激光的光學系統測量900系列柵極組件熱變形。美國航空航天公司的Pollard[11]在推力器側前方放置鏡子,通過遠距顯微鏡拍攝鏡子的反射成像,測量了T5離子推力器柵極的熱變形量。但是以上方法均存在缺陷,MacRae的接觸測量方法無法在束流狀態下測量,Trava-Airoldi的氦氖激光測量方法對鏡頭的要求十分苛刻,且對環境振動十分敏感,Pollard的方法通過角度變化計算柵極間距精度較低。基于對以上問題的改進,NASA的Soulas[12]使用遠距顯微鏡配合螺栓固定的探針測量了柵極的熱變形,該測量方式可在開啟束流的情況下運行,成功測量了美國宇航局太陽能推進技術應用準備計劃(NASA Solar electric propulsion Technology Applications Readiness program, NSTAR)推力器工作時鈦柵極組件的熱變形及熱態間距。NASA的Diaz[13]對NSTAR推力器的鉬柵極組件進行了熱變形測量,使用了Soulas的測量方式,并將兩者結果進行了對比,測量效果良好,但Soulas的方法無法測量三柵極組件的熱態間距,而且固定探針的螺釘頭突出到屏柵和加速柵之間,占用了約0.28 mm的柵極間距,從測量結果分析其精度不超過25 μm。總的來看,離子推力器柵極熱態間距的測量是十分困難的,離子推進器在伴隨有高溫和等離子體的真空環境中工作,在這種復雜的測量環境下,無法使用常見的接觸測量方法,云紋和散斑等方法也無法滿足測量要求。此外,柵極熱態間距和柵極熱變形很小,因此對測量精度要求高(10-6~10-5m)。在國內,針對柵極熱變形,目前僅有學者進行了仿真計算,如孫明明等[14]建立了LIPS-300離子推力器有限元分析熱模型,在后續研究中[15-17],對柵極力學性能參數進行等效,建立了柵極的等效無孔平板模型,仿真了柵極邊緣有約束和無約束兩種情況下的柵極熱變形,并對30 cm離子推力器三柵極組件工作時的熱變形量進行了模擬計算。但尚缺少有效的柵極熱態間距變形測量系統,為此,本文設計了一套柵極組件熱態間距測量系統,改進Soulas的探針法,使用高溫結構膠固定探針避免了使用螺栓固定探針產生的影響,提出可檢測三柵極組件熱態間距的探針安裝方案,利用遠距顯微鏡獲取探針的高分辨率圖像,基于攝像測量原理[18-19]利用亞像素定位方法提高測量精度,結合圖像處理算法完成圖像實時標定和校正,基于MATLAB2017b開發軟件實現了柵極組件中心位置熱態間距的高精度、非接觸在線測量。
1 測量系統
1.1 系統組成
系統由實驗臺、光源、柵極組件、加熱裝置、探針、合作標志、遠距顯微鏡、CCD相機、高精度4軸定位平臺和測量軟件組成,如圖1所示。

圖1 柵極組件熱態間距攝像測量系統示意圖Fig.1 Ion optics hot gap measurement system
柵極組件通過夾具固定在實驗臺上,與地面保持垂直。探針及合作標志固定在柵極中心。LED調焦攝像燈作為光源,其色溫調焦范圍為3200~5600 K,光線角度調節范圍為15°~55°,安裝于柵極組件側方。遠距顯微鏡選用Navitar 12x變焦鏡頭系統。電荷耦合器件(Charge Coupled Device, CCD)相機圖像分辨率為1600 pixel×1200 pixel,感光芯片尺寸為1/2.5″,芯片像元大小為2.8 μm×2.8 μm,每秒可采集12幀圖像。鏡頭和相機安裝在高精度4軸定位平臺上(3個平移自由度x,y,z;1個轉動自由度θZ),調整相機位置和角度使相機光軸和柵極組件的縱軸線垂直(位移臺精度5 μm,旋轉臺精度0.1°)。加熱裝置由一個2.5 kW的環型加熱器和移動裝置構成,預熱之后,移動至屏柵后方1 cm處進行加熱,環形加熱器中心和柵極的中心對齊,環形加熱器的構型可以近似在柵極上施加一個中心溫度高邊緣溫度低的溫度場,模擬推力器點火后產生的徑向溫度場。測量軟件基于MATLAB2017b開發,由標定模塊、在線測量模塊、離線測量模塊及數據顯示保存模塊構成。
本系統在真空中運行時,攝像燈以及相機等設備均位于柵極的羽流區外,避免離子束流和柵極表面高溫直接對設備測量造成影響,同時用錫箔紙、石英玻璃片對設備和鏡頭進行保護,防止環境中高速離子的濺射腐蝕,保證了設備在真空、高溫和等離子環境下長時間正常工作。
1.2 測量方法
本文設計了一種在不影響柵極間距的情況下對三柵極組件熱態間距進行測量的方法。如圖2所示,將兩個氧化鋁探針用高溫結構膠和高溫陶瓷膠分別固定到屏柵和加速柵的中心孔中。并在探針和減速柵極上用高溫陶瓷膠固定圓形合作標志,用于亞像素定位提高測量精度。為了便于安裝,探針分為兩段直徑,加速柵探針底部直徑為1.8 mm,可以穿過屏柵孔(1.9 mm)但無法穿過加速柵孔(1.25 mm)。而屏柵探針底部直徑為2.2 mm,無法穿過屏柵。第二段直徑均為 0.8 mm 均可以從減速柵中探出。圓形合作標志為直徑1.5 mm的氧化鋯圓球。
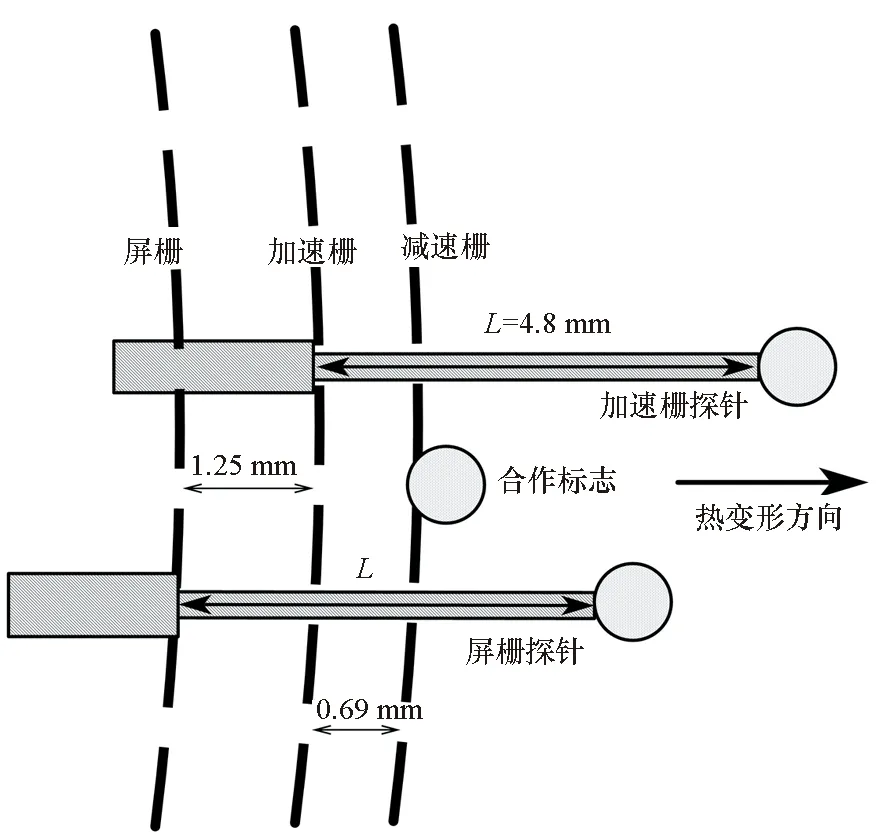
圖2 探針及合作標志安裝示意圖Fig.2 Cooperation logos installation
通過探針和柵極的位移來間接測量柵極熱態間距以及變形量。遠距顯微鏡通過4軸高精度定位平臺安裝在柵極組件的側方,調整定位平臺和顯微鏡,將探針及合作標志成像在視場的中央。圖像中三個圓形合作標志的水平方向位移分別代表屏柵加速柵和減速柵中心的變形量,其差值為柵極間距的變化量。工作時,遠距顯微鏡采集圖像序列實時傳送到計算機,合作標志的邊緣像素由分區Canny邊緣檢測提取。基于合作標志的邊緣像素,利用最小二乘法對圓心的坐標進行擬合,高精度測量合作標志位移,同時對圖像進行校正和放大系數標定。本文開發的數字圖像處理軟件集成了圖像處理和計算功能,可實現柵極熱變形量和熱態間距變化的在線檢測和輸出。
2 關鍵算法
對合作標志的定位及其位移的檢測是本測量方法的核心問題。對圖像的預處理保證了合作標志邊緣檢測的穩定性,利用最小二乘法擬合圓心位置進行亞像素定位,通過圖像畸變校正、圖像放大系數標定保證熱態間距測量的精度。
2.1 合作標志定位
Canny算子[20]在固定的參數下無法精確檢測出同一圖像中多個與背景對比度不同的物體邊緣。本文將視場劃分為上、中、下三個部分,加速柵的合作標志位于上部區域,減速柵合作標志位于中部區域,屏柵合作標志位于下部區域,每個區域里的只有單一的檢測元素,由此便能針對單一元素用Canny算子進行不同參數的高斯濾波、雙閾值處理的邊緣檢測,根據檢測結果分別調整每個區域的高斯函數標準差σ和高低閾值TL、TH,使三個區域均達到最佳的邊緣檢測效果。基于Canny算子的分區邊緣檢測得到了圓形合作標志清晰的邊緣像素,精度達到了整像素級。為了提高合作標志的定位精度,提取球形合作標志的邊緣像素點,將每一點像素的坐標代入標準圓方程,利用最小二乘法聯立方程組解出圓方程,計算圓心坐標和半徑值,基于圓心坐標定位合作標志,精度達到亞像素級。如圖3所示。
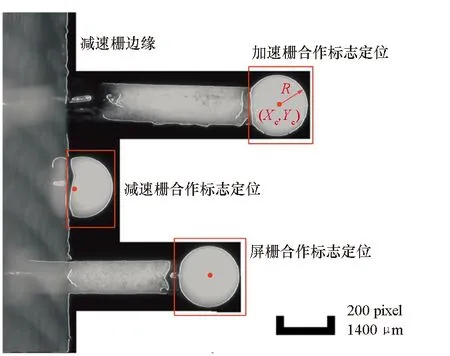
圖3 合作標志亞像素定位Fig.3 Cooperation logos subpixel positioning
2.2 圖像放大系數標定
放大系數是影響攝像測量精度中的關鍵參數,圖像中物體的像素大小乘以放大系數后轉化為世界中物體的實際大小,放大系數標定的誤差在測量結果中將成百上千倍地放大。要達到高精度測量,必須要對攝像系統進行高精度標定。
(1)

在n=100幀圖像上分別擬合合作標志的半徑值并以A類不確定度評定像素半徑測量結果,在P=0.954的置信水平下,由式(2)計算像素半徑rpixel=106.914±0.02 pixel。
(2)

由不確定度傳遞公式(見式(3))計算放大系數為λ=7.019 4±0.001 62 μm/pixel。
(3)
通過比較可知,棋盤格和合作標志標定結果基本一致,誤差最大為0.012 2 μm/pixel,合作標志標定流程簡單,可在測量的同時進行標定,適用性更強,但是存在光源干擾合作標志邊緣檢測值的誤差,故有必要在測量之前用棋盤格標定進行驗證。進一步減小誤差可采用更高精度的標定板,減少自身尺寸的不確定度。此處未對圖像進行切向和徑向畸變校正,由于鏡頭制作工藝提升切向畸變可忽略,徑向畸變主要存在于圖像邊緣區域,圖像中部的徑向畸變很小也可忽略。
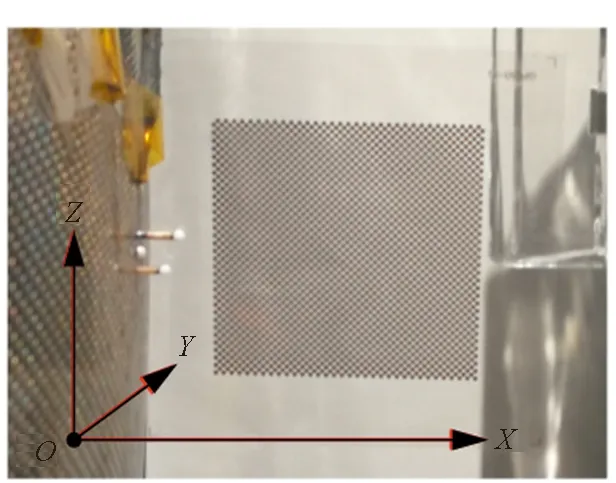
圖4 圖像放大系數標定Fig.4 Calibration board installation
2.3 相機坐標系與探針坐標系的校正
若由于相機或柵極組件安裝時產生角度誤差,使相機坐標系和探針坐標系的X方向坐標軸互相之間不平行,那將導致合作標志的位移方向與攝像機光軸不垂直,對測量結果造成影響。如圖5所示,若位移方向向內偏移角度為α,則圓形合作標志移動前后的半徑r1,r0會出現圖中的誤差Δ=r1-r0,此時合作標志的橫向位移將出現誤差Δd。
(4)
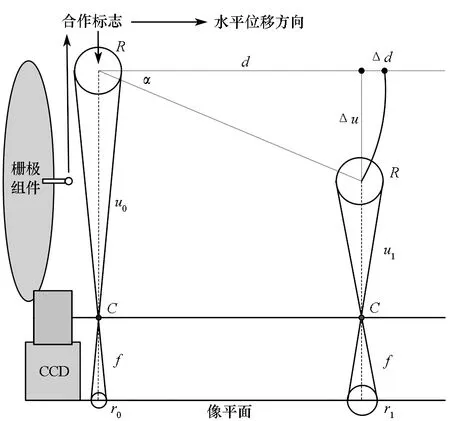
圖5 相機與探針坐標系角度校正Fig.5 Coordinate system angle correction
可求解偏移角度α,通過角度投影變換,將合作標志位移方向校正成與攝像機光軸垂直的情況,消除坐標系角度帶來的誤差。
(5)
坐標系角度的偏差對測量精度的影響較小。根據式(4)可知,偏角α造成的誤差為:α=1°時,誤差約為d×0.015%。在實際測量中偏角α一般可以控制在1°以內,故坐標系角度對測量精度的影響不大。
3 實驗
3.1測量精度驗證


圖6 移動100 μm的像素位移量測量結果Fig.6 Pixel displacement measurement results after 100 μm movement
影響系統測量精度的因素主要有放大系數的標定、坐標系角度的校正、探針及合作標志的熱穩定性,前兩者已在第2節進行了分析。探針與合作標志是本方法測量變形的參考物,要保證其在高溫環境下穩定,自身不發生變形和位移,牢固黏接在柵極上,如果其自身發生變形將直接影響測量精度。所以在材料的選擇上,應與柵極具有近似熱膨脹系數,減少熱變形不一致的影響(見表1)。
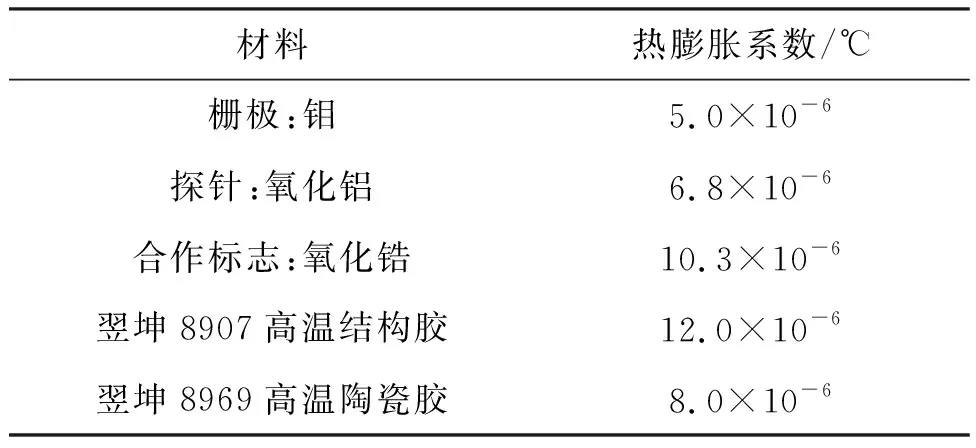
表1 探針及高溫膠的熱膨脹系數
利用線膨脹公式計算高溫下探針的最大軸向伸長量用于估計探針自身變形帶來的影響。
δ=α·L·ΔT
(6)
由圖2所示,探針的計算長度為4.8 mm,由于柵極間溫度差異較大,需要分段計算探針在不同區域間的熱膨脹量。實驗中室溫30 ℃,屏柵最高356 ℃、加速柵最高238 ℃、減速柵下游估計最高為138 ℃,計算結果為加速柵探針最大伸長3.9 μm,屏柵探針最大伸長5.8 μm。
同時在450 ℃高溫下進行耐熱實驗,加熱-冷卻循環沖擊5次,在實驗過程中沒有發現探針、合作標志變形、脫落的現象,探針在冷卻后可恢復到原位。綜合考慮,影響系統測量精度最主要的因素是圖像放大系數的標定誤差以及探針自身的熱變形。對比美國NASA的MacRae變形測量精度(25 μm),本文測量系統在非加熱狀態下測量精度優于6 μm,需要指出位移臺的調整精度和測量誤差處于同一級別對精度驗證造成影響,系統實際測量精度應優于6 μm。考慮到探針的最大熱膨脹為5.8 μm,故在加熱狀態下測量精度優于12 μm,比NASA測量精度高52%。
3.2 大氣環境下加熱實驗
實驗LIPS-300柵極組件具有三層球面柵極,由內至外分別是屏柵、加速柵及減速柵,加速柵和屏柵的間距為0.9 mm,本實驗件未加裝減速柵。實驗在大氣環境中進行,加熱熱源為2.5 kW的徑向加熱器,沿徑向在加速柵和屏柵分別黏接5個K型熱電偶測量溫度,如圖7所示。遠距顯微鏡通過4軸精密定位平臺安裝在柵極側方。為了檢測實驗臺在加熱過程中是否出現熱變形,在柵極邊緣與型材架的固定位置處使用千分表進行位移檢測。整個測量系統如圖8所示。

圖7 熱電偶安裝位置Fig.7 Thermocouples installation
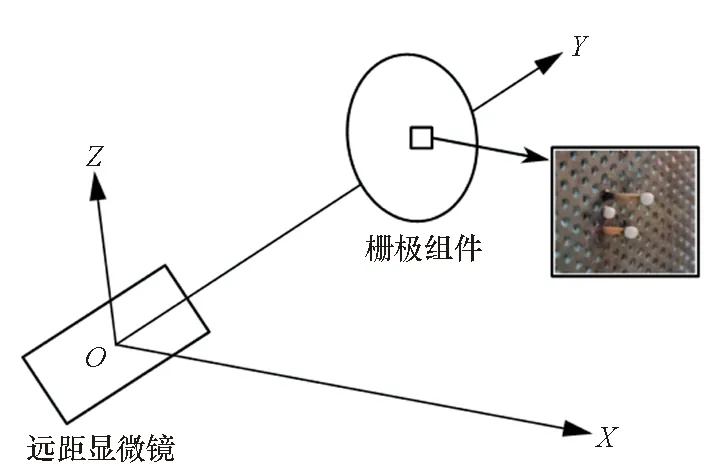
圖8 大氣環境下LIPS-300熱態間距測量實驗Fig.8 Hot gap measurement experiment
室溫30 ℃開啟檢測系統后,第30 s開始加熱,第573 s停止加熱開始冷卻,第2050 s結束測量。整個實驗過程中屏柵和加速柵的溫度如圖9所示,加熱初期1 min內溫度變化率最大,加熱4 min 后溫度基本穩定,加熱器模擬了沿徑向分布的溫度場。實驗整個過程中屏柵和加速柵的熱變形數據以及熱態間距變化量如圖10所示,開始加熱后的1 min內隨著溫度快速升高,屏柵和加速柵迅速產生變形,其中屏柵變形明顯大于加速柵,在屏柵和加速柵溫差最大150 ℃時,柵極間距最大減小413 μm(約定為屏柵變形量減去加速柵變形量)。加熱1~4 min期間,溫度仍在上升但速率明顯下降,屏柵和加速柵分別達到各自最大變形量為859 μm和548 μm。加熱4 min后隨著柵極溫度趨于穩定,屏柵和加速柵的變形量逐步回落至690 μm和331 μm,屏柵中心溫度穩定為356 ℃,加速柵中心溫度穩定為238 ℃。第573 s移開加熱器開始冷卻,溫度快速下降,屏柵和加速柵變形迅速減小并產生負值,最大達-260 μm。隨著冷卻過程柵極變形和間距緩慢回復,在第2050 s實驗結束時,熱變形和間距變化量基本回復到零,溫度回到室溫30 ℃。實驗中圓形合作標志半徑無明顯變化,故α修正角取零。圖像放大系數標定為7.00 μm/pixel。千分表示數值無明顯變化。
從實驗結果可知柵極熱變形具有以下特點:
1)柵極間距的變化量取決于兩柵極的溫度差。柵極間的溫度差越大,柵極熱態間距的減小量越大。柵極間距的最小值出現在加熱初期,此時屏柵和加速柵的溫度差最大,隨后溫度差減小時,間距量也隨之回升。
2)在加熱初期柵極溫度迅速變化時,柵極產生劇烈變形,當溫度趨于穩定時,變形量將緩慢減小到穩定值。停止加熱開始冷卻時,溫度迅速減小,柵極變形也會迅速下降并產生負位移現象,等待柵極完全冷卻后,柵極變形量緩慢回到零位。其他真空環境實驗[9, 12-13]也具有上述變形特點。Rawlins等[22]指出柵極組件中的球面柵極和柵極安裝環都會產生變形,球面柵極受熱膨脹使柵極中心的拱高增大,柵極固定環受熱膨脹使柵極中心拱高減小。所以柵極達到最大熱變形后,在溫度維持不變的情況下,熱變形量逐漸減少的原因是柵極安裝環及其周圍區域的溫度上升慢,熱容量大導致其熱變形滯后于柵極。當柵極球面產生變形后,安裝環溫度才慢慢升上來,并產生一個徑向變形,徑向熱應力將柵極球面向四周拉扯,導致球面拱頂高度減少,由此產生熱變形曲線逐漸下降的現象。對于在冷卻時出現柵極負位移的現象,實驗中測量試驗臺位移的千分表無明顯變化,說明柵極負位移現象不是試驗臺變形引起,而是柵極組件冷卻時產生了負向位移。所以同理柵極組件在空氣中冷卻時,帶孔柵極比柵極固定環溫度下降快,首先回復變形,而柵極固定環的變形回復慢,所以出現柵極負向變形現象。

圖9 柵極溫度測量結果Fig.9 Grids temperature during the test

圖10 LIPS-300柵極組件熱態間距及熱變形量測量結果Fig.10 LIPS-300 ion optics hot gap and thermal deformation measurements
4 結論
本文基于國內柵極熱態間距測量需求開發了一種柵極組件熱態間距攝像測量系統。結論如下:
1)測量系統滿足在真空、高溫、等離子環境下對柵極變形進行實時檢測的要求,也可基于拍攝的視頻調整參數進行離線檢測,同時適用于雙柵及三柵結構的柵極組件熱態間距的測量。
2)系統采用可靈活修改參數的人機界面檢測多目標的邊緣并采用最小二乘法對合作標志進行亞像素定位,提高測量精度。精度驗證實驗結果表明,在非加熱狀態下系統測量誤差優于6 μm,在加熱狀態下考慮探針熱膨脹,系統測量誤差優于12 μm,比美國NASA的MacRae接觸式變形測量方法精度高52%。
3)分析了影響系統測量精度的影響因素。用兩種方法對比驗證圖像放大系數的標定、對相機和探針的坐標系角度校正、對探針及合作標志的耐熱性和熱膨脹量進行測試計算,分析得影響系統測量精度的主要因素為圖像放大系數的標定誤差以及探針自身的熱膨脹。
下一步將對離子推力器柵極組件在真空中運行時進行熱態間距實測。同時研究等離子體束流光強對攝像測量的影響,以及離子濺射腐蝕對探針的影響。并計劃采用石英材料的螺紋或楔形卡口探針安裝固定,以及采用更高精度的平移臺和標定片來提高測量精度。
猜你喜歡
中華詩詞(2020年1期)2020-09-21 09:24:52
中學生數理化·八年級物理人教版(2019年9期)2019-11-25 07:33:02
中學生數理化·八年級物理人教版(2019年3期)2019-04-25 06:20:54
小學生作文(中高年級適用)(2018年5期)2018-06-11 01:22:56
中學生數理化·八年級物理人教版(2018年3期)2018-05-31 08:52:45
數學小靈通·3-4年級(2017年10期)2017-11-08 08:42:59
數學小靈通(1-2年級)(2017年10期)2017-11-08 08:39:45
中學生數理化·七年級數學人教版(2017年11期)2017-04-23 07:18:00
數學大王·中高年級(2016年12期)2016-12-26 21:37:36
少兒科學周刊·兒童版(2016年1期)2016-03-14 03:52:21