面向軍事應用的航空人工智能技術架構研究
2020-02-18 04:46:30雷宏杰姚呈康
導航定位與授時 2020年1期
雷宏杰,姚呈康
(航空工業西安飛行自動控制研究所,西安 710076)
0 引言
當前,隨著云計算、大數據、機器學習、模式識別、人機交互等人工智能技術不斷成熟,機器對于人類智能的模擬程度和決策能力日益提高,在眾多領域和任務場景中呈現出深度學習、跨界融合、人機協同、群智開放、自主操控等新特征[1]。人工智能技術已成為新一輪產業變革的核心驅動力,在互聯網、高端制造業、武器裝備研發等領域發揮作用,衍生出各種新興技術和應用產品,對國家經濟、社會發展、國防安全、國際格局產生重大而深遠的影響[2]。在軍事領域,人工智能技術同樣被認為是贏得全球軍事對抗主動權的重要戰略抓手[3]。世界主要軍事大國近些年相繼出臺國家級人工智能發展規劃,凝聚各領域優勢研發資源,頒布一系列產業促進政策,為技術向產業滲透奠定良好基礎。對軍事裝備而言,由于其任務場景具有環境高復雜、博弈強對抗、響應高實時、信息不完整、邊界不確定的特征,因此無法將民用人工智能技術直接應用到軍事應用中[4]。世界各主要軍事強國都在軍事領域投入大量研發資源,用于提升武器裝備對軍事任務場景的感知、認知、決策和執行能力,并通過對戰場數據的進一步挖掘和處理,形成新技術支撐下的全新對抗戰術和戰法,提升自己在國際安全事務方面的話語權和影響力。目前,基于人工智能的智能雷達、智能電磁頻譜戰設備、智能協同無人機集群,基于類腦技術的信息獲取與處理,基于機器學習和計算機視覺的軍事圖像分析、軍事資源能力知識圖譜,基于AR或VR技術的單兵裝備、空間智能感知、智能空管等新一代人工智能軍工技術和產品已經得到應用[5]。
在航空領域,智能航空武器裝備將成為未來體系化斗爭中的核心樞紐之一。在空中作戰任務場景中,天空背景相對簡單,作戰單元之間的節點信息化基礎較好,因此面向作戰的軍事智能技術將最早在航空裝備上形成作戰能力,人在空中作戰對抗中的角色也將從操作員逐步轉變為指揮員,極大地增強體系戰斗能力,保證對抗優勢。當前,國外對航空裝備智能化研究投入巨大,在機載硬件、算法軟件、飛行驗證等方面取得了突破性的進展[6-7]。因此,在國家軍民融合戰略的大背景下,需要充分吸收和利用民用人工智能技術的優秀成果,系統梳理空中作戰任務場景的技術需求和實現途徑,完善包括航空軍事應用在內的各領域人工智能技術架構,指導未來一段時間內的軍事智能技術規劃與發展,實現裝備研發和制造過程的創新發展,以滿足未來智能化對戰條件下的軍事需求和裝備智能化升級需求[8]。
1 軍用航空智能技術應用現狀
1.1 國外航空裝備智能化現狀
美國的軍事智能技術主要面向各種軍用平臺,通過提升航空武器裝備在作戰體系中的智能化水平和協同能力來指引技術轉化方向[9]。典型成果包括:郊狼無人機蜂群、自主化無人對抗平臺、智能化精確制導殺傷彈藥、智能指揮決策系統、阿爾法(ALPHA)空中作戰模擬系統、智能裝備故障診斷系統等。在航空領域,美國自2014年9月提出抵消戰略以來,已經在自主學習、人機協作、機器輔助人員作戰、有人作戰單元與無人作戰單元混合編隊作戰、網絡化半自主武器五大關鍵技術上取得了一系列的突破和應用[10]。當前的一些典型技術突破和重點項目包括:面向導彈和無人機蜂群協同攻擊的自主集群技術;面向無人轟炸機的神經網絡高性能計算技術;空軍實驗室成立ALPHA自主空戰項目,搭建以提升無人機戰術決策能力為目標的仿真實驗環境;成立算法戰跨職能小組,研究面向航空無人裝備目標探測、識別與預警的高性能視覺算法;2017年,美空軍E-3機載預警與控制系統和F-16戰斗機將成為首批接受人工智能和物聯網聯合預測維護服務試驗的武器裝備。美軍在F-35、F-22等先進戰斗機平臺上開展了無人僚機項目研究,以實現人類飛行員可以在座艙內直接控制無人機,執行偵察監視、火力打擊等作戰任務的構想。美軍下一代B-21遠程轟炸機也將探索與無人機的混合編隊。2019年,美國國防高級研究計劃局(Defense Advanced Research Projects Agency, DARPA)啟動空戰進化(Air Combat Evolution, ACE)項目,重點研究人機協同作戰與空中格斗情況下,人類飛行員和人工智能系統混合編隊作戰機制[11]。
1.2 智能空中作戰任務場景分析
未來的智能化空中作戰場景的主要特點是對抗樣本學習量有限、機載能力約束大、計算資源有限、網絡資源不足、電力資源有限、加密機制導致數據結構復雜等挑戰。在典型的空中對抗任務場景中,需要航空裝備在人機協同、集群控制、自主學習、攻防決策4個方面具備一定程度的智能水平。
在人機協同方面,要求無人航空器與有人機形成混合編隊,參與空中對抗,具備輔助人或自主實施攻防戰術行為的能力;集群控制方面,要求作戰單元具備化整為零,隨機分散的集群化作戰和控制能力;自主學習方面,要求作戰單元具備戰場協同與先進飛控策略的解算執行能力;攻防決策方面,要求作戰單元具備針對新型航空器的打擊毀傷型攻擊系統的加載和控制能力,重點研究方向為機載定向能武器。
基于上述分析,未來的智能化空中作戰可按照航空裝備智能化水平高低分為初級與高級2個階段。初級階段以集群化無人作戰單元執行輔助人類作戰任務為目標,面向集群攻擊、集群防御和偵察監視任務,在彈射、空投、集群飛行、集群重構、群體感知、集群通信、任務規劃、任務執行、任務評估及回收等任務場景中,不斷提升無人機群自主搜索、確認、摧毀、反饋評估和補充打擊能力。高級階段以空中無人作戰平臺與人類形成混合編隊共同作戰為目標,面向有人無人協同空中作戰和無人機空中作戰任務,具備戰場大數據分析和戰略意圖自主決策的進化適應能力,不斷豐富無人作戰平臺的戰術庫、機動庫、機器學習算法、態勢理解算法、智能決策算法、機動軌跡生成算法、機動軌跡跟蹤算法以及空中作戰態勢評估算法,實現人與機器共生共存。
1.3 軍用航空人工智能技術發展方向
未來的智能化戰爭將圍繞“人+泛在系統智能+智能航空裝備”的戰斗要素展開,因此需要同時開展泛在系統智能和智能航空裝備的研發[12]。
泛在系統智能通過去中心化網絡技術促進異構系統的信息共享、共洽和融合,基于人工智能、大數據和泛在網絡構建新型跨域融合的柔性體系架構,實現動態重組和自主學習進化,使系統涌現出新的體系特征和能力。泛在系統智能主要包括智能指揮控制、多智能體協同組織、戰場態勢認知與決策等。
智能航空裝備則需要全面提升感知、認知、決策、執行智能化程度。采用人工智能技術,延伸和增強人的能力和效率,提升航空裝備的智能化水平,提升作戰效能,滿足未來航空裝備在單體作戰、群體作戰、聯合作戰以及戰區作戰的要求,實現在未來作戰體系下,作戰人員與武器裝備的高效協同,共生共存。
2 軍用航空人工智能的定義和內涵
2.1 軍用航空人工智能的概念與范疇
航空裝備在面對未來的智能化戰爭環境高復雜性、博弈強對抗性、響應高實時性、信息不完整性、邊界不確定性的挑戰方面,由于樣本學習量有限、機載能力約束大、計算資源有限、網絡資源不足、芯片處理能力不足、電力資源有限、加密機制導致數據結構復雜等限制,導致軍用航空人工智能與一般人工智能存在一定區別[13],有待進一步針對性發展和研究。本文對所述的軍用航空人工智能概念描述如下:軍用航空人工智能是針對航空軍事任務場景,面向作戰需求,研究和制造在人類給定的具體目標下,能夠通過感知、認知、決策、執行過程達成給定目標的航空裝備及其相關產品的科學與工程。
在上述定義下,本文所述的航空人工智能技術主要面向作戰,以軍事應用為背景,基于人機混合智能系統的任務執行想定,通過不斷提升機器的智能水平,使航空裝備在強實時、高動態、不確定態勢和不完備信息條件下,能夠逐步實現對人的輔助、協同以及融合,不斷提升人機混合智能系統的任務執行效能。因此,對通用人工智能技術在航空軍事任務中的應用與集成、面向人機混合智能任務的航空武器裝備及其子系統產品開發,上述過程中的基礎使能類技術都屬于軍用航空人工智能技術范疇。
2.2 軍用航空人工智能技術發展路線
人工智能系統可以在給定問題、領域知識和問題求解目標的前提下,通過獲取相關信息、提取解決問題所需的專門知識、在目標引導下把知識轉化為決策和可執行的行動,最終達到目標、解決問題。在這個過程中,問題、領域知識、預期目標都需要由人類設計者預先給定。按照目前腦神經科學和認知科學的研究成果,將人類智能的信息處理過程按照信息科學理論分為感知(Observe)、認知(Orient)、決策(Decide)、執行(Action)4個環節,簡稱為OODA過程。其運行模型如圖1所示。
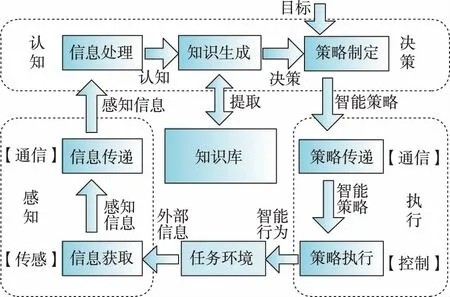
圖1 人工智能系統的信息運行模型Fig.1 Information operation model of artificial intelligence system
對于給定具體目標的人工智能系統而言,技術模擬的途徑集中在感知、認知、決策、執行環節,目的是提高人造系統自身的智能水平,達到與人相似的任務目標求解表現。與此同時,人工智能技術還被廣泛應用在提升人機混合智能系統的應用場景中,圖1中的目標和智能系統的知識庫,在最初只能由人類定義和輸入,因此在目標生成、知識圖譜、規則編碼等研究領域有眾多技術被應用在人機混合系統的交互、協同、控制和維護上,確保人工智能系統可以按照人類期望的方式進行工作。
當前主流的人工智能系統研發途徑按派系分為連接主義、符號主義和行為主義,三者分別在結構、邏輯和行為中對人類智能進行了模擬。上述技術途徑彼此之間的關系如圖2所示。
圖2中將人工智能的技術實現途徑按思考、行動、類人程度、理性這4個維度進行分割,這些途徑的主要成就和缺陷如表1所示。
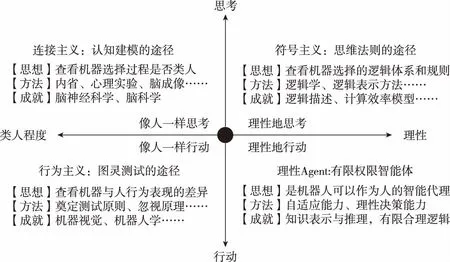
圖2 人工智能系統研發技術途徑分類Fig.2 Research and development technical approaches of AI system

表1 當前人工智能技術途徑的成就和缺陷Tab.1 Achievements and defects of typical AI technical approaches
航空人工智能系統研發將綜合上述技術途徑,結合具體航空應用,以通用人工智能技術成果為支撐,理性Agent研發為牽引進行技術研發,構建如圖3所示的軍用航空人工智能技術發展路線。

圖3 航空人工智能技術發展路線Fig.3 Development route of aviation AI technology
理性Agent技術途徑基于智能運行機制,將現有的結構、邏輯、行為模擬方法進行拼接,按照智能體(Agent)能力的不同,結合運行環境,形成具有不同智能程度的、以有限理性為評估的人工智能技術路線。對航空領域而言,其技術研究路線從航空應用的實際結果出發(皮特森象限),既注重基礎科研研究(波爾象限),也注意面向航空裝備和業務需求的工程技術積累(愛迪生象限),最終形成面向航空軍事應用的行業人工智能技術群(巴斯德象限),帶動航空軍事智能技術全面發展。
2.3 航空人工智能運行層級與實現途徑
基于未來體系化戰爭場景,將航空人工智能系統依據其運行環境和層內承擔的主要功能差異,劃分為圖4所示的四層運行層級。
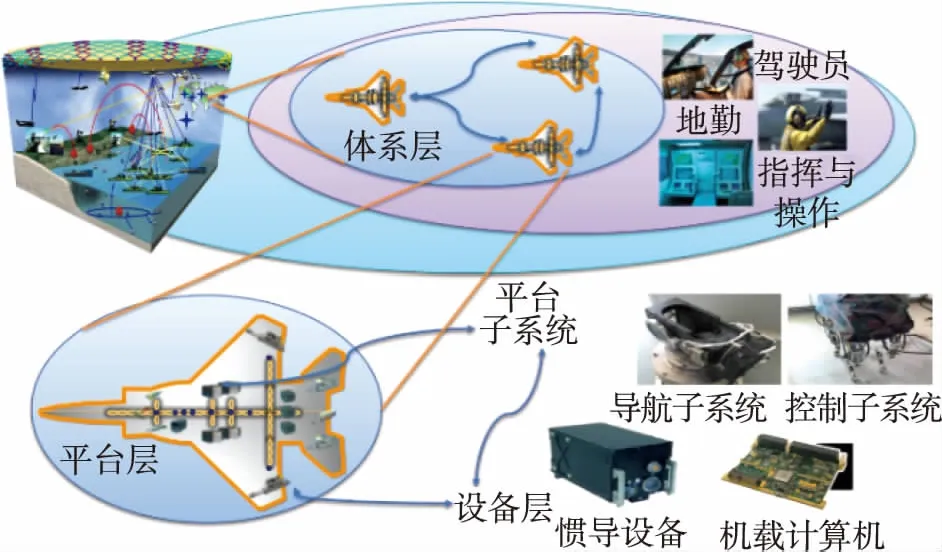
圖4 航空人工智能裝備運行層級Fig.4 Aviation AI equipment operation level
其中,體系層由相同或者不同機種之間協同配合,形成針對給定任務的集群體系;平臺層指能夠執行單獨任務的航空單智能體單元;平臺子系統層指航空平臺產品中與智能功能相關的子系統;設備層指子系統中承擔感知、認知、決策、執行具體功能的設備。體系層之上為航空裝備與其他裝備構成具有跨域協同特征的復雜組織體層,在此不對該層智能特征進行分析。
在應用層面,通過將計算力轉化為戰場上的感知、認知、決策和執行能力,極大地提升作戰單元的OODA循環速率,進而形成強大的戰斗力[14];通過研究交互、協同、控制、維護等應用場景中的技術需求,提升人機混合智能系統在不同任務場景中的智能水平,滿足現代戰爭對響應速度、資源配置、自主決策等方面的需求。
現代空中作戰理論,在飛機能力相同、敵方可見、武器可達的情況下,OODA循環速度決定著空中作戰的成敗,整體循環速度越快取勝幾率越大[15]。當前上下層OODA循環速度的落差是制約空中作戰平臺性能發展的瓶頸,表現為信息過載、人機融合困難。因此,機載設備智能化水平的提高,意味著人類操作者可以將更多的OODA環節任務移交給機器,以獲得更大的空中對抗制勝概率[16-17]。
以軍用單體作戰平臺為例,在認知和決策過程中的任務轉移和與此相關的關鍵技術如表2所示。
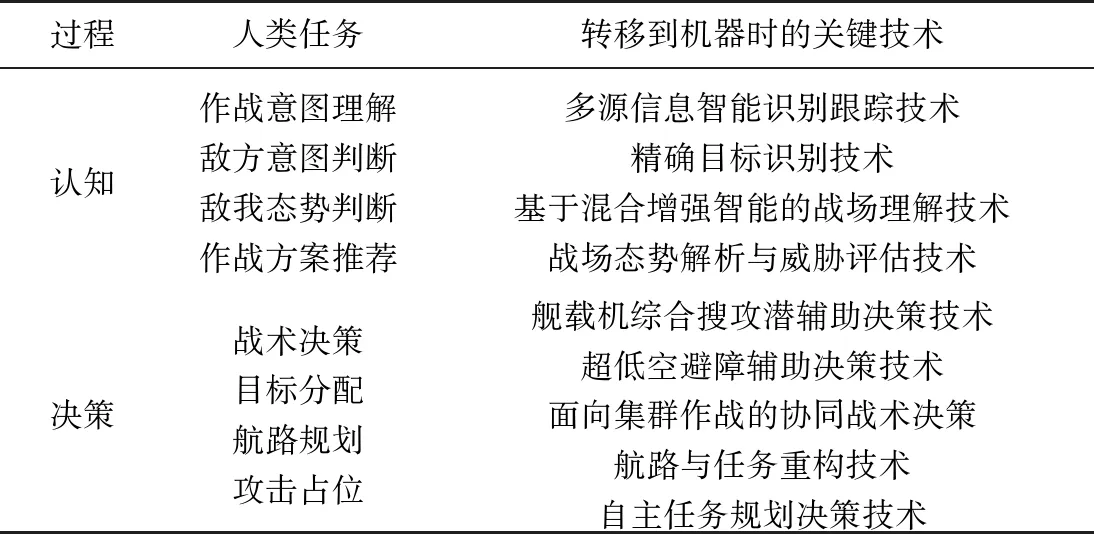
表2 平臺層單體智能系統任務轉移列表Tab.2 Task transfer list for platform operation level
以平臺層航空裝備為基礎,體系層和由海陸空天聯合作戰體系構成的復雜組織體層是對OODA過程的嵌套和層疊,經過對平臺層進行多體綜合和體系綜合,OODA任務復雜度、智能水平、系統可靠性要求逐步提高;平臺子系統層和設備層是對平臺層OODA環節的增強,經過對平臺層進行系統拆解和組件拆解,OODA各環節可以在時間加速和空間加速的技術途徑上實現能力增強,OODA循環速度逐步提高,人類授權的任務量逐步增多。面向各運行層級的智能需求如圖5所示。
圖5中的體系層由多個智能體構成,每個智能體有自己的OODA環,同時又與其他的OODA環之間進行信息交互,從而實現態勢共享、協同認知、共同決策、聯合攻防。對體系層而言,其智能增強的方式是通過信息共享和組合行動實現效能倍增,其關鍵問題是個體智能的融合與群體權衡、認知與意圖的傳遞、通信拒止條件下的系統穩定性等[18]。總體來說,隨著智能等級的提高,OODA自主性逐步提高,協同的難度逐步增加。體系層航空裝備的嵌套OODA過程如圖6所示。
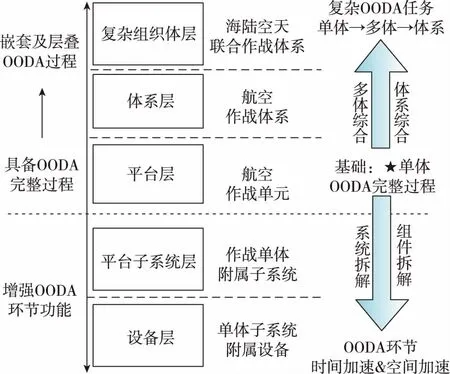
圖5 航空裝備各運行層級對智能的需求Fig.5 Requirement of intelligence for each operation level of aviation equipment
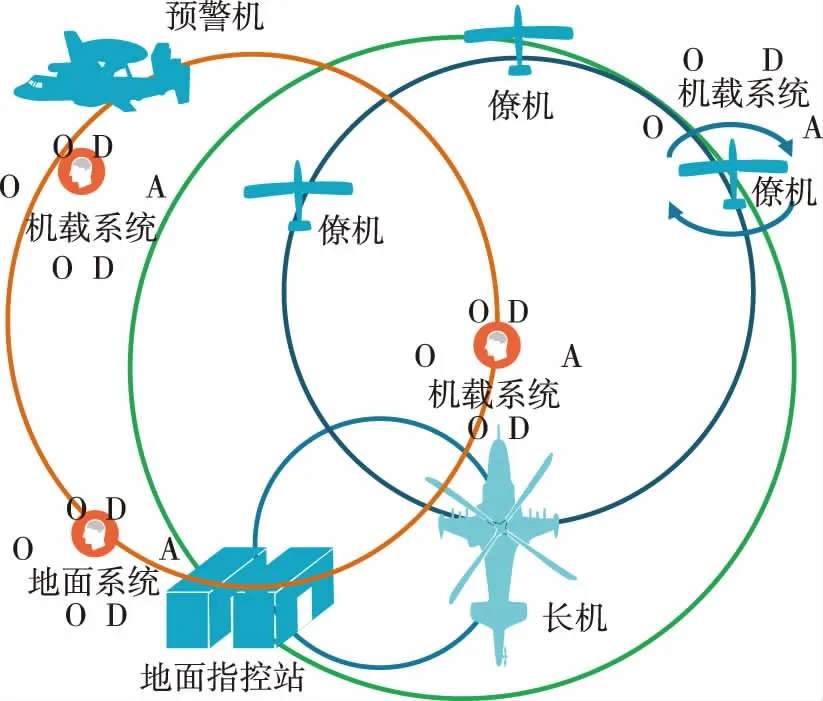
圖6 體系層航空裝備的多層OODA過程Fig.6 Multi OODA processes for SOS aviation equipments
對于平臺子系統層而言,其不具備完整的OODA環節,但具有以優化系統性能為目的的學習過程,其智能增強的方式是通過自學習的手段增強平臺層裝備在OODA各環節的自適應能力。典型的平臺子系統OODL(感知、認知、決策、學習)的智能增強途徑如表3所示。
對于設備層而言,其智能增強的目標為單一的平臺層OODA環節功能。例如傳感器提升觀測效率、執行器提升作動效率。該層能力提升是航空智能化水平提升的基礎。
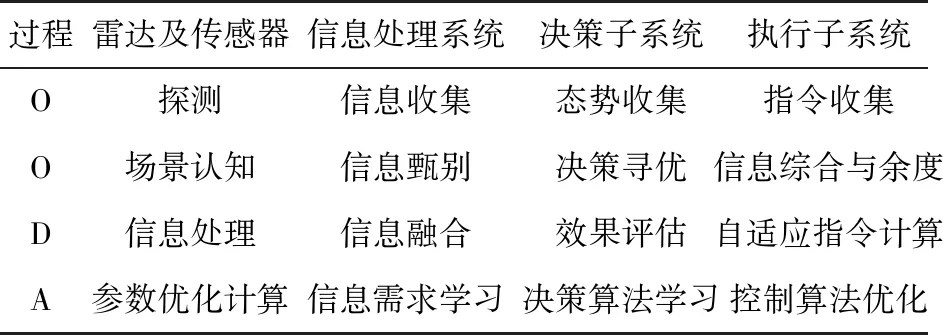
表3 典型平臺子系統層智能增強的途徑示例Tab.3 Examples of approaches to intelligent enhancement for typical platform subsystems level
3 航空人工智能技術架構
3.1 總體架構概述
航空人工智能技術架構基于軍用航空裝備的人工智能關鍵技術需求進行搭建,按照需求分析、系統設計、驗證確認的系統工程分析方法,形成目標明確、路徑明確、條件明確的人工智能架構,如圖7所示。
3.2 航空人工智能技術體系
關鍵技術群可按照運行層級(設備層、平臺子系統層、平臺層、體系層),智能功能(感知、認知、決策、執行、交互、協同、控制、維護),智能等級(效能增強級、運作靈巧級、執行自主級、任務自主級、融合智能級)3個維度構成如圖8所示的關鍵技術功能空間。航空人工智能關鍵技術都可以在此技術空間中找到對應的位置。對于體系層而言,存在跨功能的綜合技術,但總體來說仍處在關鍵技術空間中。
如圖9所示,面向運行層級主要指應用于運行層級的綜合性技術,該類技術包含有多個智能功能;面向智能功能主要指針對感知、認知、決策、執行、交互、協同、控制、維護這8個智能功能的專用技術;面向基礎使能主要指支撐航空裝備智能化提升所需要的基礎技術。需要指出的是,在智能功能類別中,感知、認知、決策、執行是通過將通用人工智能算法、硬件、分析方法等面向航空任務場景進行研究與開發,形成能夠顯著提升相應設備或子系統在OODA環節性能表現的基礎性技術;而交互、協同、控制、維護是面向行業具體應用需要,通過將人工智能系統與特定應用場景深度融合,定制開發而形成的應用性技術。兩類技術共同構成了航空人工智能系統研發的功能技術群。

圖7 航空人工智能技術總體架構Fig.7 General architecture of aviation artificial intelligence technology
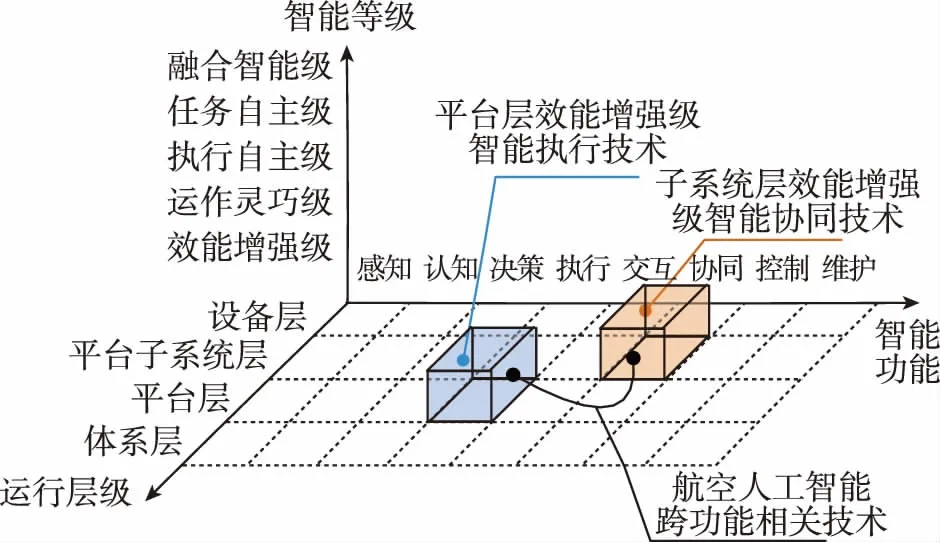
圖8 航空人工智能關鍵技術功能空間Fig.8 Function space of key technology of aviation AI
關鍵技術空間可以將航空人工智能技術分為如圖9所示的三類。
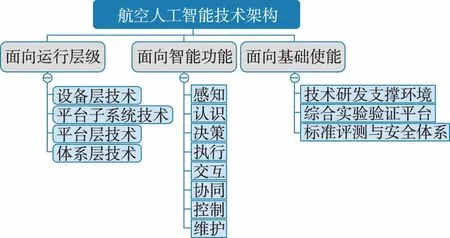
圖9 航空人工智能技術架構類別Fig.9 Category of aviation AI architecture
3.3 航空人工智能重點技術
(1)面向智能功能
智能感知:提升傳感系統對外部環境的感知能力,借助相關人工智能軟硬件技術,使感知系統可以在高動態任務環境下,通過適應環境變化,自主生成最佳傳感策略,實現對不同類型和范圍的感知目標進行特征提取與持續跟蹤[19-20]。
智能認知:提升對感知系統輸出信息的處理能力,實現對任務態勢信息的壓縮、理解、預測,達到與人類相當的認知水平。對感知信息的處理可圍繞任務需要,通過濾波、變換、融合、特征提取、識別等算法,綜合不同數據源信息[21],依據認知系統已形成的知識庫數據,形成可供決策系統處理的信息。
智能決策:提升對認知系統輸出信息的綜合處理能力,實現基于任務目標約束下的快速求解能力。通過運用神經網絡、專家系統、模糊推理、對策論等方法自主或輔助人類對認知數據進行整合、分類、分析、規劃、推演、評估,最終可提供基于規則、認知、類腦運算等模式下的決策推理[22-23],并結合智能體Agent的執行能力,在期望時間內給出決策結果,顯著增強人機混合智能系統決策的全面性和實效性。
智能執行:提升對決策系統輸出指令的執行處理能力,利用推理、規劃等手段將決策意圖分解為智能系統相應設備的可執行指令,并通過機動或運行等方式實現決策意圖。具體來說,從任務需要出發,執行系統可以根據系統內部自帶的分析系統,通過選擇指令高效執行、指令自主執行、任務高效執行、任務自主執行、自主學習與自主執行結合的方式,最優化地完成決策系統的輸出意圖,確保任務能夠低耗、精準、有效、快速執行[24]。
智能交互:面向航空人機混合智能系統,在機載環境的限制約束下,提升人與機器之間信息傳遞的效率和方式[25]。利用多平臺多模式多維交互,實現各種任務環境下的對人類參與者的自然語音、腦控信息、指令意圖識別,可通過虛擬及增強視覺等反饋方式,將智能系統的處理結果以更友好直觀的方式向人類參與者傳輸,達到機器與人的無障礙便捷交互。
智能協同:面向由航空多智能體參與的任務場景,通過對任務態勢進行感知、認知,形成針對多智能體的決策意圖,為多智能體以最優配對要求執行決策意圖提供無縫的、透明的、通暢的協同基礎環境和協同機制,達到不同構型、不同模式平臺之間可以互相理解、通信、交流的目的[26-27]。
智能控制:面向提升航空智能體任務執行的魯棒性要求,確保在任務環境發生變化或智能系統本身出現部件和子系統故障時,可以通過自主學習優化、自主進行大范圍控制參數調整以及執行系統結構調整,達到在各種環境條件下始終維持較大范圍控制包線,實現智能體在執行過程中對任務環境自適應、自優化控制[28]。
智能維護:面向航空裝備,可依據在任務環境中以及特定的測試中獲取的信息,提供一種預知型、主動式的維修保障模式,實現從傳統的事后維修、定期檢修向主動維修、基于剩余壽命的預測性維修轉變,全面提升航空裝備健康管理和面向任務的權衡保障能力,突破認知性保障技術和余度管理技術,達到從粗放、規模型維修保障到集約、精確、敏捷、經濟的維護型保障轉型[29]。
(2)面向運行層級
設備層智能技術:針對航空機載設備,通過將當前通用的先進感知技術、認知算法、決策模型、執行算法等與相關機載設備研制相融合,在航空裝備平臺子系統智能提升需求牽引下,研發符合機載應用環境限制的軟硬件技術。
平臺子系統層智能技術:針對航空裝備平臺的子系統,通過提升感知自適應能力、認知強推理能力、決策類人推理能力、執行自進化能力,進一步將通用技術與各種子系統研制相融合,研發一系列面向OODA能力提升的專用技術。在此基礎上,綜合與集成面向航空裝備單體能力提升的OODA技術,為研制機載環境約束下的交互子系統、協同子系統、控制子系統、維護子系統提供相應的技術支持。
平臺層智能技術:針對航空裝備平臺,面向其承擔的具體獨立任務,通過研究其任務實現過程中對于感知、認知、決策、執行各環節的能力需求,研發一系列面向不同任務的專用技術。在此基礎上,綜合與集成面向不同復雜程度航空任務的OODA技術,為人機混合系統在任務執行過程中的交互、協同、控制、維護提供相應的技術支持。
體系層智能技術:針對多個航空智能體構成的智能體系,研發一系列信息共享與協同機制技術,實現多智能體面向復雜任務的效能倍增和協同配合,實現群體智能增強,解決單智能體向群體融合過程中的行動權衡、認知與意圖傳遞、通信拒止條件下的體系穩定性等問題,為多智能體之間共享態勢、協同認知、共同決策、聯合攻防提供技術支持[30]。
(3)面向基礎使能
基礎使能為關鍵技術提供支撐技術,是針對航空人工智能應用的特殊性,為航空裝備在強實時、高動態、不確定態勢和不完備信息等不利條件下的多樣化智能應用提供通用性的技術支撐,實現對智能感知、智能認知、智能決策、智能執行、智能交互、智能協同、智能控制、智能維護技術和產品的通用化支持。支撐技術主要包括技術研發支撐環境、綜合試驗驗證平臺、標準評測與安全體系。
技術研發支撐環境:利用經過適用性改造的算法、芯片、運行支撐環境,構建高效能的智能計算平臺,通過與其配套的系統設計與驗證手段,為關鍵技術群提供基礎支撐。該類技術之間的支撐關系如圖10所示。
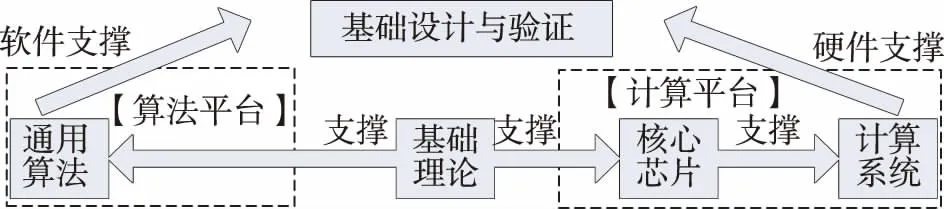
圖10 航空人工智能技術研發支撐架構Fig.10 R&D support architecture of aviation AI technology
圖10中的基礎理論是發展航空人工智能算法和核心芯片的前提,研究院所可采取跟進、學習手段,以國內外高校聯合論證或咨詢等方式實現對基礎理論研究的了解與利用。技術研發支撐環境的關鍵技術集中在算法平臺、計算平臺、基礎設計與驗證中。
綜合試驗驗證平臺:航空人工智能技術需要經過嚴格的試驗并在驗證后投入批量生產和實際應用,包括模擬驗證、試飛驗證、適航驗證。對于模擬驗證,須包括一定復雜度與逼真度的機載系統仿真、環境仿真和戰斗單位仿真,并建立仿真評價體系,對人工智能應用的效能、成本、缺陷等進行定性或定量的測算。對于試飛驗證,需對模擬驗證項目進行進一步驗證,與模擬驗證進行迭代,提升技術成熟度。適航驗證則需驗證人工智能應用與目前航空工業對于機載技術的適航要求是否符合,并論證新適航規章制定的必要性和修訂方案。
標準評測與安全體系:航空人工智能標準是在基礎理論與應用取得進展的前提下,對人工智能應用方向的標準化工作,包括軟件工程、互操作性、性能驗證、涉密信息處理、信息安全與防崩潰機制、可追溯性等進行約定和規范[31]。航空人工智能安全是對智能系統倫理、法律與社會影響,以及智能系統面對惡意攻擊的反應進行研究,主要內容包括符合社會倫理道德與法律的功能定義與使用限制、考慮社會影響的系統使用方案[32]、功能監控與安全終止機制、系統安全漏洞的檢測與修補、面臨惡意攻擊的防御能力、自我診斷和修復能力、自我改進的確認與倒回機制、錯誤指令的保護機制、涉密信息的保護與銷毀機制。
4 結論
本文通過梳理面向軍事應用的航空人工智能進展現狀和面向未來空中作戰任務場景需求,歸納出航空人工智能技術的概念和內涵,并從人工智能技術發展路線出發,對運行層級、功能需求、基礎使能3個層面所需要的智能技術發展重點進行論述,最終歸納得到航空領域的人工智能技術架構。本架構對制定航空領域相關技術規劃的指導意義如下:
1)本文所述的技術架構可作為航空工業單位進行人工智能技術研發的參考,促進各技術按照層級分類聯合研發,逐步形成完備有序的技術儲備。工業部門可依據技術架構中關鍵技術層的實際需求,加強對應用層的支撐和對基礎層的牽引,協助形成行業合力,帶動上下游相關產品研發進展,為聯合其他工業部門形成裝備的體系化智能提升奠定良好基礎。
2)航空人工智能具有高動態、強對抗、高安全、高可靠等特殊需求,建議以支撐航空智能系統功能需求為牽引,優先發展面向系統功能和應用場景的航空人工智能技術。同時梳理提煉技術突破中遇到的基礎理論問題,據此面向全社會研究機構發布航空領域智能技術基礎理論研究課題,并緊跟工業化需求開展相關的標準制定工作,構建航空軍用智能技術研發環境。
3)由于軍事裝備的特殊性,現有面向民用領域的人工智能技術不能夠直接應用于軍事裝備,需要由工業部門牽頭,面向未來體系化作戰需求,提升海陸空天各作戰單元之間的協同作戰能力。航空人工智能技術架構可作為民用人工智能技術向軍事應用融合轉移的指導性參考,制定具有較強針對性的軍民融合戰略,促進軍民產業之間交流合作,明確技術方向,提升成果轉化效率。
猜你喜歡
工業設計(2022年8期)2022-09-09 07:43:20
軍民兩用技術與產品(2021年10期)2021-03-16 06:05:30
北京測繪(2020年12期)2020-12-29 01:33:58
商界(2019年12期)2019-01-03 06:59:05
文苑(2018年23期)2018-12-14 01:06:06
文苑(2018年19期)2018-11-09 01:30:14
文苑(2018年17期)2018-11-09 01:29:26
文苑(2018年21期)2018-11-09 01:22:32
IT經理世界(2018年20期)2018-10-24 02:38:24
家庭影院技術(2017年9期)2017-09-26 03:41:45