基于嵌入式技術偵察無人機
2020-02-22 06:52:26彭松付宇航吳澤吳東升
科技創新導報 2020年28期
彭松 付宇航 吳澤 吳東升
摘? 要:如今電子科技飛速發展,相應的軍事也逐步趨向智能化、多樣化,對于瞬息萬變的戰場,利用無人設備減小傷亡率,降低風險將會是一種趨勢,而這種無人機的問題和難點在于體積大會被發現,損失成本增加,對各種因素應對有著不同的缺陷。對于這個問題本文提出一種便利小巧且成本低廉的無人機的方法,自主研究設備,使其大大減小成本且能完成相應功能,并對電源充分利用方面有一些改進,達到能夠應對各種突發因素的目標。
關鍵詞:嵌入式系統? 偵察無人機? 姿態解算? 圖像處理
中圖分類號:TP274? ? ? ? ? ? ? ? ? ? ? ? ? ? ?文獻標識碼:A? ? ? ? ? ? ? ? ? ?文章編號:1674-098X(2020)10(a)-0006-04
Abstract: Now the rapid development of electronic technology, the corresponding military also gradually towards intelligence, diversification, for rapidly changing battlefield, using unmanned equipment to reduce the casualty rate, reduce the risk will be a trend. The problem with using unmanned equipment to reduce the casualty rate is that the size of the drone is large enough to be detected. The cost of loss increases and there are different deficiencies in the response to various factors. For this problem, this paper proposes a method that can facilitate small and low-cost uav, independently research equipment, make it greatly reduce the cost and complete the corresponding functions, and make some improvements in the full use of power supply, so as to achieve the goal of being able to cope with various emergent factors.
Key Words: Embedded system; Reconnaissance UAV; Attitude solution; Image processing
隨著人們對電子技術的要求不斷的提升,智能控制成為電子發展的一大趨勢。作戰武器的智能化、多樣化將成為一種發展趨勢。其中無人機是電子智能發展的一個重要方向,造價低廉的無人機設備能進行遠距離的高空偵查、具有一定的隱身性將會是戰場上優勢。
基于嵌入式技術的偵查無人機優點是方便攜帶,對于飛控算法無需依賴地球磁場,抗干擾能力強,視覺算法出色,電路設計合理,可在不同環境下,精準識別目標,由數據傳輸模塊,傳回目標信息,能夠根據作戰的目的進入空域完成自主飛行偵察的小型無人機將會成為軍事力量發展的重點之一。
1? 研究內容
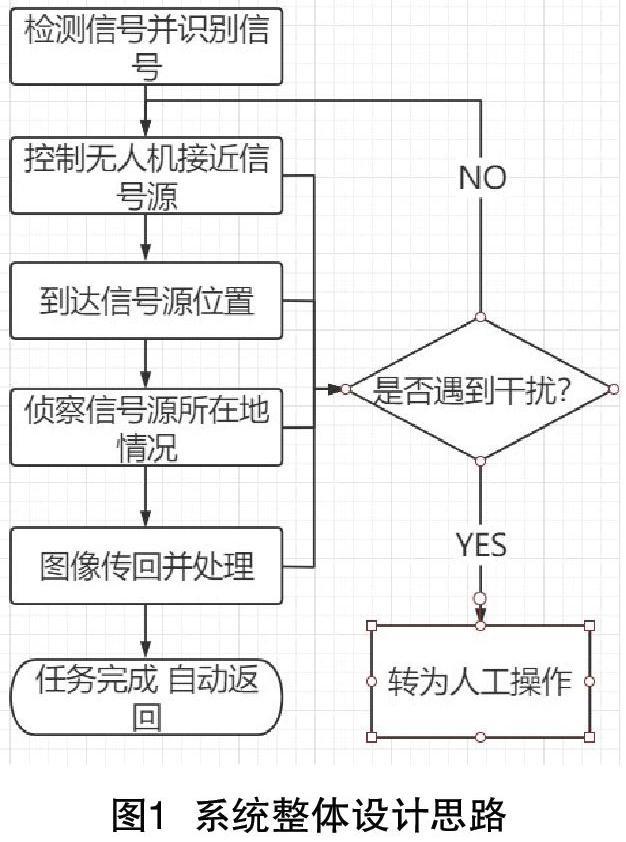
基于嵌入式偵察無人機的開發內容由無人機的制作,信號識別系統的開發,排除其他因素干擾的研究,偵察畫面傳輸和讀取處理系統研發,識別系統研發,自動避障系統以及自動操作返回系統研究組成,信息的傳輸需要對包括傳感器的準確利用,傳感器數據的回傳、匯總、處理以及對識別系統的準確利用,對于復雜地形準確的利用自動避障等內容。系統整體設計思路見圖1。
1.1 嵌入式軟件算法
1.1.1 姿態解算
由于需要降低成本及各方面問題,無法使用高精度的陀螺儀及加速度計,故用廉價的mpu6050模塊。 由于mpu6050的陀螺儀的精度問題,需要校準零飄。將在5s內對誤差進行積分,并乘kp,得出gyro_offest。此為零飄獲取。I2C通信讀取到的值減去gyro_offest便得到了更為接近真實值的角速度。
加速度計過濾處理,由于mpu6050的加速度的精度及設計問題,需要低通濾波處理,加速度計的參數用matlab的信號處理工具箱生成,效果十分良好。加速度計由陀螺儀數據融合,由于加速度的靜態穩定性好,而陀螺儀的動態性能好,靜態性能相對不穩定,所以我們用加速度的值去修正陀螺儀的值。
1.1.2 四元數基礎
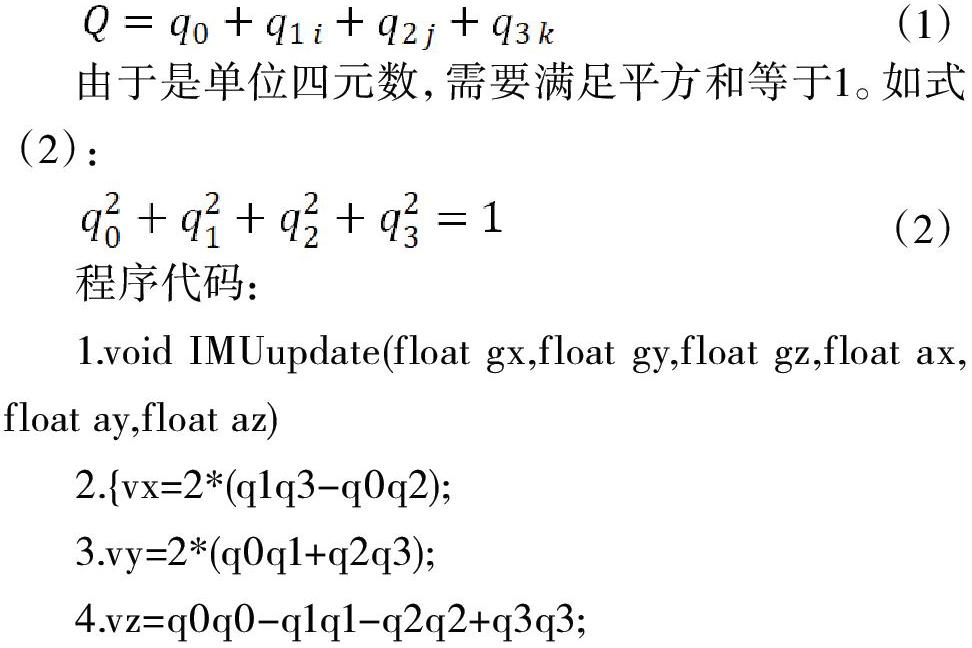
除了用歐拉角代表姿態,還可以用單位四元數代表姿態,四元數使用 4 個參數代表。如式(1):
由于是單位四元數,需要滿足平方和等于1。如式(2):
程序代碼:
1.void IMUupdate(float gx,float gy,float gz,float ax,float ay,float az)
2.{vx=2*(q1q3-q0q2);
3.vy=2*(q0q1+q2q3);
4.vz=q0q0-q1q1-q2q2+q3q3;
5.ex=(ay*vz-az*vy);
6.ey=(az*vx-ax*vz);
7.ez=(ax*vy-ay*vx);
8.exInt=exInt+ex*Ki;
9.eyInt=eyInt+ey*Ki;
10.ezInt=ezInt+ez*Ki;
11.gx=gx+Kp*ex+exInt;
12.gy=gy+Kp*ey+eyInt;
13.gz=gz+Kp*ez+ezInt;
14.q0=q0+(-q1*gx-q2*gy-q3*gz)*halfT;
15.q1=q1+(q0*gx+q2*gz-q3*gy)*halfT;
16.q2=q2+(q0*gy-q1*gz+q3*gx)*halfT;
17.q3=q3+(q0*gz+q1*gy-q2*gx)*halfT;
18.yaw=atan2(2*q1 *q2+2*q0*q3,2*q2*q2-2*q3*q3+1)*57.3;
19.pitch=asin(-2*q1*q3+2*q0*q2)*57.3;
20.roll=atan2(2*q2*q3+2*q0*q1,2*q1*q1-2*q2*q2+1)*57.3}
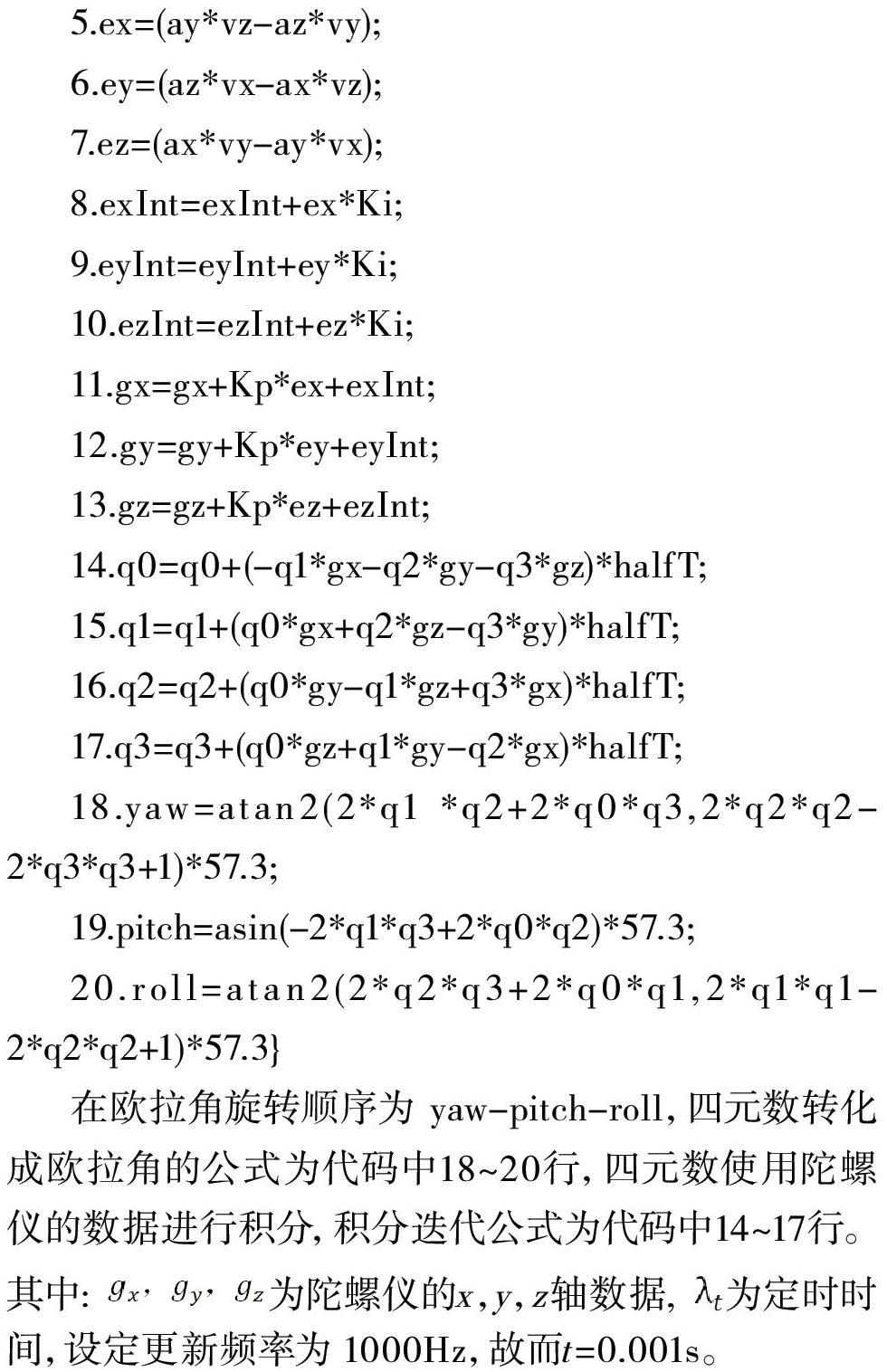
在歐拉角旋轉順序為 yaw-pitch-roll,四元數轉化成歐拉角的公式為代碼中18~20行,四元數使用陀螺儀的數據進行積分,積分迭代公式為代碼中14~17行。其中: 為陀螺儀的x,y,z軸數據, 為定時時間,設定更新頻率為 1000Hz,故而t=0.001s。
1.2 視覺算法
在視覺識別過程中通過人臉檢測提取特征臉的區域,對提取出特征臉區域進行LBP特征點的提取,然后將提取出的特征點進行PCA降維技術,極大的提升人臉匹配的速度,然后通過在實際場景中發現的面部與提取出的特征臉數據進行匹配,通過設定一定的閾值,使得機器可以識別出不同的人臉。
算法概述:我們選取的是經典的Eigenface算法,算法原理是把人臉數據從像素空間轉換到另一個空間,在另一個空間中做相似計算,Eigenface選擇的是PCA技術,兩者巧妙結合實現了將人臉數據圖像的協方差矩陣進行本征值分解,從而得到相應的本征向量,對于每個本征向量相當于描述人臉之間的一種變化。這就表明每個臉可以通過這些本征向量進行線性組合。
PCA算法:設正交基,數據點在該基底上的投影距離為乘所以在該基底上的投影的方差為:
其中:m為樣本數量,在數據運算之前對數據x進行0均值初始化,從而如式(4)
假設,則根據PCA目標,我們需要求解最大時對應的根據拉格朗日算子求解得如式(5),則構造函數:如式(6)
接下來對S進行特征分解,根據特征向量和的關系結論,S的特征向量集合如式(8)
另外,由于中X已0均值處理,根據協方差的定義,可得滿足投影后數據距離最大的新的正交基{u1,u2···uk}因此如式(9):
2? 硬件設計
由于飛控板、電源板在成品中并不能提供多余的引腳,并且價格昂貴,對此我們設計符合需求的兩層飛控板,保證系統的模塊化,對外設進行直接連接的方式設計PCB板。
整體電路設計部分如圖2。
常規的供電是由電池作為動力供電分別向主控和電機電調供電,這種情況需要增設降壓模塊,會增大元件放置空間,而我們的供電是利用電調中BEC供電,減少設計的浪費,去除降壓模塊,使各部分的功能得到充分利用。
對于一般的圖像處理、圖傳需要經過miniPC處理,使成本需求高,占用空間大,對此我們采用OpenMV和配套圖傳,進行圖像處理并傳送,利用的空間減小且成本降低。
3? 創新點
可視化、易于操控的無人機系統,打破了以往復雜的操控平臺,為人們能夠靈活的操縱以及大眾化發展提供了基礎保證。
通過OpenMV處理圖像可以比較準確的發現可疑人員,為一般情況搜索可疑人員提供便利,減少了搜索人員負擔。
硬件上對供電系統進行了改進,并在PCB設計中留有外設接口,能夠根據實際情況對所需外設進行接插,方便使用。
4? 結語
基于嵌入式偵察無人機在閾值魯棒性方面使用負反饋調節,PID調參,多次進行實地測試,得到最佳參數,對無線模塊選型、硬件設計方面考慮環境、工作頻率、功率、接口、項目需求、傳輸距離等方面問題。在設計上也存在一些問題,閾值調整方面,由于環境、機械結構、傳感器精度等方面的因素影響,對于程序中的閾值選擇要求魯棒性更高;當前無人機不足以支持遠距離的飛行及速度高的飛行。此后我們將會對這些方面的設計進行改進,使此設備能夠有更好的用途。
參考文獻
[1] 李增彥,李小民.單兵無人機發展現狀及關鍵技術分析[J].飛航導彈,2017(6):23-29.
[2] 袁藝,李志飛,朱豐.無人機與未來作戰芻議[J].國防,2019(5):36-39,50.
[3] 權家樂,錢杭.基于指數模型的無人機偵察能力評估[J].科技創新與應用,2020(9):65-66.
[4] 程方曉,王海彪,劉璐.小型無人機飛行姿態串級控制系統[J].長春工業大學學報,2017,38(5):453-458.
[5] 童江.基于雙STM32多旋翼無人機控制系統設計[J].科學技術創新,2019(22):39-40.
[6] 崔暢.軍用偵察無人機自救裝置外觀造型設計研究[D].西安:西安工業大學,2019.
[7] 烏仁別麗克.基于串級PID控制算法的四旋翼無人機控制系統設計與實現[D].上海:東華大學,2016.
[8] 許慕鴻.安防人臉識別技術及測試方法研究[J].信息通信技術與政策,2019, 299(5):82-89.
[9] 王聰.基于深度學習的無人機單目標識別與跟蹤算法研究[D].廈門:華僑大學,2019.
[10] 王永振.小型無人機飛控系統硬件設計與實現[D].洛陽:河南科技大學,2019.