基于衛星定位技術的智能出行系統研究
2020-03-02 08:45:04謝文娣王海龍黃家寶賀文龍
綿陽師范學院學報 2020年2期
謝文娣,王海龍,黃家寶,賀文龍
(安徽新華學院電子通信工程學院,安徽合肥 230088)
0 引言
隨著云計算、大數據、人工智能、移動互聯、移動物聯等新興技術的發展,智能化理念已逐漸滲透到人們生活的方方面面,智能出行的概念應運而生,可利用衛星定位、移動通訊、高性能計算、地理信息系統等技術實現位置和速度等信息實時顯示,為人們出行提供良好的便利[1,2].人在航海過程中、沙漠里因環境等因素可能迷失方向,出現生命危險,駕駛汽車過程中可能會遇到碰瓷現象或交通事故,此時出行記錄設備將發揮重要作用.因此,本文提出一種基于衛星定位技術的智能出行系統進行精確定位、實時采集數據和圖像并記錄,可實時呼救及時得到救援,以及還原事故現場.
1 設計方案

圖1 系統架構圖Fig.1 Design diagram of the system
該衛星定位智能出行系統是對出行工具行駛速度、時間、里程以及有關出行工具行駛的其他狀態信息進行記錄、存儲并可通過接口實現數據輸出的數字式電子記錄裝置.它主要由定位模塊、藍牙模塊、GPRS通信模塊、太陽能穩壓充電模塊、上位機等部分組成,采用GPS衛星定位模塊采集數據,通過藍牙模塊實時將數據發送到手機APP上顯示,同時利用GPRS移動通信模塊SIM900A將衛星定位的經緯度、速度、加速度、文字等信息上傳至遠程云服務器,人們通過PC端查看云服務器和上傳至服務器中的數據包,最終實現位置信息、日期、時間和速度等數據記錄和采集的功能.系統整體框架圖如圖1所示.
2 系統設計與實現
硬件上,衛星定位模塊采用BN-280芯片,支持GPS和北斗雙模輸出,利用衛星定位當前位置和確定當前時間實現數據采集.數據傳輸則依賴于以CC2541為核心的藍牙模塊CC2541EMV2.6,該模塊穩定性好且傳輸距離遠,它將數據實時傳送到手機APP上顯示.GPRS通信模塊采用SIM900A模塊,可實時上傳經緯度、海拔高、速度、日期、時間信息至云服務器,實現遠程監測.電源模塊采用3.7 v的鋰電池,并輔以太陽能穩壓充電,達到低碳環保的目的.CC2541電路圖如圖2所示.
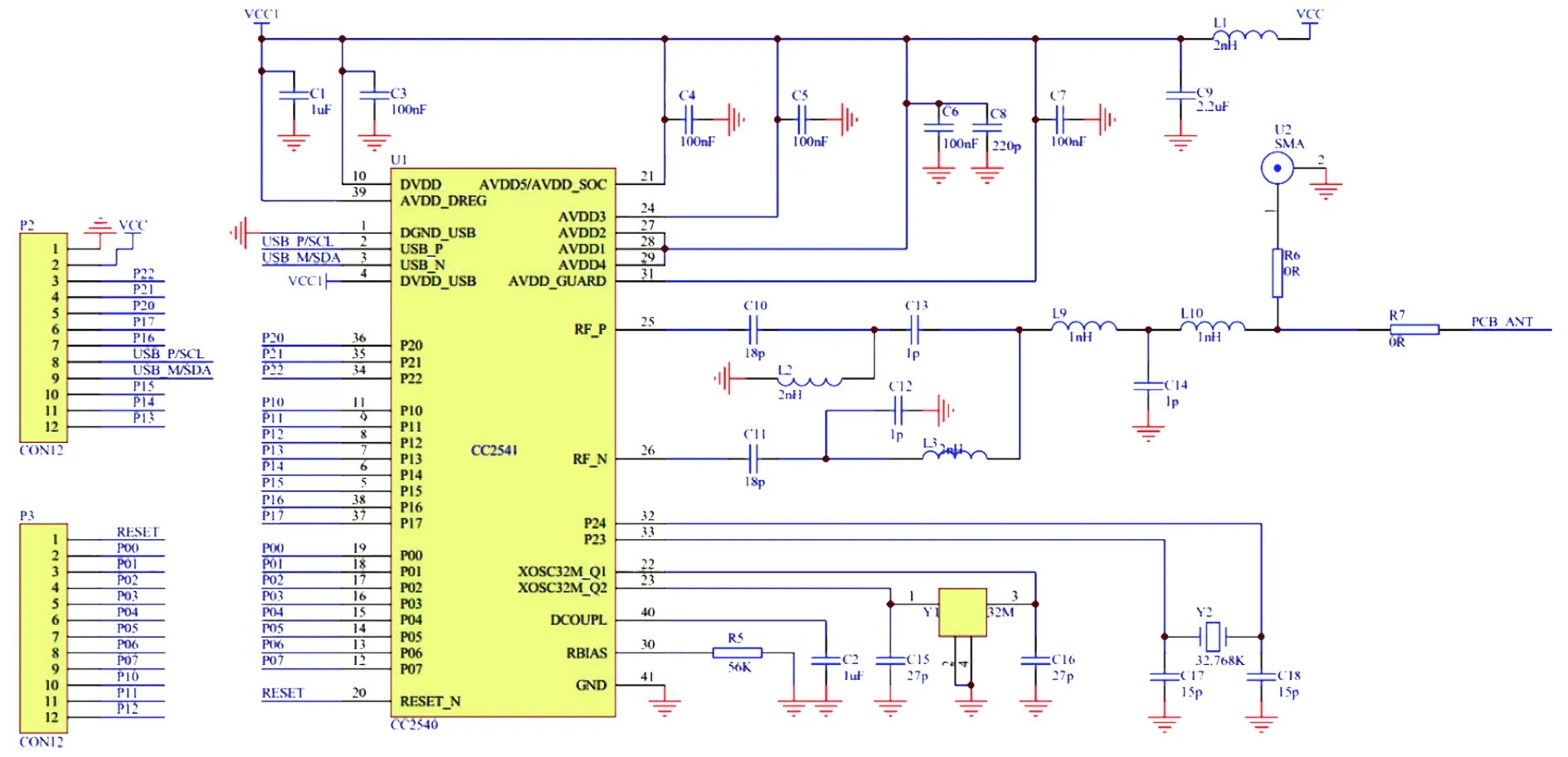
圖2 CC2541電路圖Fig.2 Circuit diagram of CC2541
CC2541模塊設有4個振蕩器,分別為32 MHz外部晶振、16 MHz內部RC振蕩器、32 kHz外部晶振和32 kHz內部RC振蕩器,可以為內部時鐘提供時鐘源,系統上電時,默認使用內部16 MHz時鐘和32 kHz振蕩器.若系統對精度要求高,作為無線RF收發,需接外部32 kHz晶振.
BN-280定位模塊采用UBLOX G7020-KT芯片設計,具有高精度、高靈敏度、低功耗的特點,具備全方位定位功能,常用電壓3.3和5 V,廣泛應用于開發多種GPS終端產品.
SIM900A模塊屬于雙頻GSM/GPRS模塊,具有低功耗,方便靈活,操作簡單成本較低且穩定的特點,掉線之后可以自動連接,工作電壓為3.1~4.6 V,可提供包括語音、短息和GPRS數據傳輸等功能.
軟件上,該系統采用半開源手機APP Laptimer,利用Lua語言自主編寫App腳本,支持Android和IOS系統.定位模塊通過連接衛星獲得實時數據,包括經緯度、海拔高、時間、速度等,將數據通過串口發送到CC2541芯片,它將接收到的數據進行解析壓縮,通過天線轉發給手機并在APP上實時顯示[3,4].同時可通過串口將數據發送給GPRS通信模塊SIM900A,再通過連接附近的基站,最終將數據上傳至云服務器,實現遠端監測.其設計流程分別如圖3、4、5所示.服務器大致流程為首先打開手機藍牙開關,運行WHLSCRL腳本,搜索到藍牙設備名稱為WHL、服務UUID為FFF9、特征UUID為FFF6并建立連接;然后獲取壓縮包數據,得到GPRS實時數據如經緯度、方向角海拔高度、定位衛星數量等,最后計時器數據通過調節攝像頭定時監控錄像顯示日期、時間和速度等信息,并存儲于內存中,時速表以表盤的形式顯示當前時速,通過設置起始速度和終止速度測量始末時間差完成加速測試[5,6].上位機基本流程是首先運行Windows系統,固定好公網IP地址,然后設置好出入站規則,如選擇端口號3 388做開放測試,設置網絡協議類型為TCP server,本地主機端口為3388,最后,詢問是否有客戶端連接,若有連接則顯示客戶端IP地址及端口號,繼續詢問客戶端是否有數據進來,如果有則顯示客戶端數據、日期、時間等信息.下位機基本流程為先進行各個模塊的初始化,設置藍牙名為WHL,服務UUID為FFF9,特征UUID為FFF6,然后開始詢問GPS、藍牙以及GPRS是否連接成功,根據指示燈閃爍進行判斷,最后GPS模塊下發GPS定位信息,通過藍牙串口發送數據包,GPRS模塊通過TCP/IP協議將數據上傳存儲到云服務器.

圖3 服務器程序流程圖 Fig.3 Program flow chart of the server圖4 上位機程序流程圖Fig.4 Program flow chart of Upper machine圖5 下位機程序流程圖Fig.5 Program flow chart of the lower computer

圖6 智能出行記錄系統實物圖Fig.6 Physical picture of intelligent travel record system
該系統結合軟硬件設計最終可實現用戶對運動載體的信息管理功能,例如它能統計出每一天的移動里程、移動時間及累計移動里程;同時能記錄運動載體近期的移動狀態信息,即在移動過程中與實時時間相應的每分鐘間隔內的平均移動速度.通過藍牙模塊可與移動端手機APP連接,實現信息可視化.通過GPS定位模塊,可實時顯示當前位置信息和采樣時間,經緯度、海拔高其精度控制在3米以內,可做到實時定位,永不迷失.通過APP調用手機攝像頭可實現視頻攝錄功能,將時間、位置、速度等重要信息通過水印形式在視頻下方顯示,做到真實記錄.實物圖如圖6所示.
本系統創新之處在于它采用太陽能穩壓清潔能源供電,響應國家綠色能源號召;與傳統的手機通過蜂窩移動通信網絡接收GPS數據不同,該系統采用衛星定位,最多可支持12顆,其定位方式更精確;同時兼容Android和IOS操作系統雙平臺,支持安卓和蘋果手機使用;衛星定位信息可上傳至遠程云服務器進行存儲,可通過PC端查看我們位于深圳的云服務器和上傳至服務器的數據包,便于大數據分析處理.
3 總結
該系統主要利用衛星定位,通過藍牙傳送數據到手機APP,GPRS模塊與云服務器通信,實現經緯度、速度、日期、時間等信息的實時顯示和存儲.此系統體積小、性價比高、實時監測,可用于汽車定位、無人機測速、輪船定航向等,實現對運動載體運動信息的全方位監測,適合個人及單位使用.
猜你喜歡
工業設計(2022年8期)2022-09-09 07:43:20
軍民兩用技術與產品(2021年10期)2021-03-16 06:05:30
北京測繪(2020年12期)2020-12-29 01:33:58
裝備制造技術(2019年12期)2019-12-25 03:06:46
中國洗滌用品工業(2019年4期)2019-05-11 09:27:34
家庭影院技術(2017年9期)2017-09-26 03:41:45
中華手工(2017年2期)2017-06-06 23:00:31
中外會展(2014年4期)2014-11-27 07:46:46
建筑創作(2001年3期)2001-08-22 18:48:14
祝您健康(1987年3期)1987-12-30 09:52:32
