北斗單點定位的誤差補償方法
2020-03-04 07:11:00張衡衡潘衛軍殷浩然
導航與控制 2020年6期
關鍵詞:模型
張衡衡,潘衛軍,殷浩然,劉 濤,徐 斌
(中國民航飛行學院空中交通管理學院,廣漢618307)
0 引言
北斗衛星導航系統是我國獨立自主研發的全球衛星導航定位系統,北斗導航系統包括空間端、地面端和用戶端,可以在全世界范圍內全天候地為各類用戶提供高精度和高可靠的定位、導航、測量、授時等服務。1984年,我國開始籌劃利用地球靜止軌道衛星進行導航定位的技術方案。2018年12月,北斗衛星導航系統的服務范圍擴展為全球,這標志著北斗衛星導航系統正式進入了全球時代。為了提高北斗衛星導航系統的定位精度,應盡力減小各種誤差源的影響[1]。根據北斗衛星定位的工作機理,本文從影響北斗衛星定位精度的位置誤差、對流層誤差和電離層誤差入手,提出了減少誤差的修正方法。
在國內,對于精密單點定位的研究起步較晚。魏子卿[2]、葛茂榮[3]在相對定位的數學模型中也介紹了相對定位模型中非差模式的處理方法,但是這種方法和非差單點定位模式是不同的。武漢大學的葉世榕[4]對非差相位精密單點定位進行了深入研究,并且改進了模型,同時自行研制定位軟件并進行了試算。目前,國際上對流層延遲現象進行改正的方法主要是模型函數法,包括Hopfield模型、Saastamoinen模型、Black模型、UNB系列模型和EGNOS模型等[5]。但是,由于對流層本身的復雜性,現存模型對于水汽在對流層空間的分布情況及其在時間上的變化規律仍然很難確切地描述。近年來,我國有學者提出組合定位的概念,利用北斗和全球衛星定位系統(Global Positioning System,GPS)共同完成偽距和載波相位組合的高精度動態定位。在對定位方法和定位系統進行研究的同時,針對北斗相關終端產品的研究也在同步進行,積極突破用戶終端的解算算法,研究芯片卡板技術,制造高精度的北斗接收機,為開展北斗精確定位研究準備好前提條件[6]。
本文通過分析北斗導航系統的定位算法,對北斗導航系統的定位誤差進行了研究,介紹了定位誤差產生的原因,并給出了相應的減小誤差的解決方案,以提高定位精度。
1 北斗導航系統的定位算法
北斗導航系統的發展經歷了三代,在定位算法和誤差分析上均實現了很大提升,此處介紹的是第三代北斗導航系統的定位算法。
1.1 觀測方程及線性化
定義tj為衛星Sj發射測距信號的衛星鐘時刻,tj(G)為衛星Sj發射測距信號的標準時刻,ti為觀測站Ti接收到衛星信號的接收機鐘時刻,ti(G)為觀測站Ti接收到衛星信號的標準時刻,為衛星的信號傳輸至觀測站Ti的傳播時間,δti為接收機鐘相對于標準時的鐘差,δtj為衛星鐘相對于標準時的鐘差[7]。

有了線性化的觀測方程,可方便地列出誤差方程,進而求出觀測站Ti的坐標[8]。
1.2 偽距導航原理
設在歷元t時刻觀測站接收機觀測了n顆衛星(n>3), 相應的偽距觀測量分別為, 由上述偽距觀測的線性觀測方程可以列出矢量表達的誤差方程

解上述方程,并且由最小二乘法可得

如果給每個觀測值賦予不同的權,即對所有觀測量都有權陣Q-1, 則誤差方程的最小二乘解為

上述解算過程涉及到了觀測站的概略坐標,如果觀測站概略坐標與真實坐標相差較大(如相差數千米),為了獲得較高的定位精度,需要一個迭代過程,直到坐標的改正量足夠小[9]。
2 北斗單點定位系統誤差補償方法
對北斗系統在進行定位解算工作中的誤差進行分析,其誤差來源可以大致分為三個類型:1)由衛星自身相關因素引起的誤差;2)由傳播路徑相關因素引起的誤差;3)由接收機相關因素引起的誤差。下面主要分析星歷誤差、電離層誤差和對流層誤差,并提出修正模型。
2.1 衛星星歷誤差及修正方法
衛星的理論位置和實際位置在實際情況下存在著一定的誤差,即廣播星歷的衛星軌道誤差(又稱衛星軌道偏差)。GEO衛星對地球有相對靜止性,在分析時很難將GEO衛星定軌時鐘的衛星鐘差分離開來。同時,光壓對GEO衛星產生的影響較大,在其他條件相同的情況下,由GEO星歷導致的測距誤差約為MEO衛星的兩倍。
利用改進低次曲面模型修正星歷誤差:利用多個差分站的星歷誤差在一定的服務區域內建立低次曲面模型,并將曲面模型的幾個參數廣播給用戶。用戶根據自己所處的經緯度,利用曲面模型參數計算出所在位置的星歷誤差,并直接改正[10]。
低次曲面模型可表征為

式(17)中,Vi(q11,q22)為星歷誤差,q11和q22分別為用戶所在位置的經度和緯度,Aj(j=0,1,2,3,…,9)為第j個系數矩陣,則經過迭代后為

式(18)中,Δρ為經過修正、消除星鐘差后剩余的星歷誤差,其模型對應的迭代矩陣D有6種形式。 式(19)以模型 2(式(17)中i=2 的情況)為例,可表示為

式(19)中,D的行數等于差分站數量,q1n和q2n分別為差分站n的經度和緯度。根據模型參數計算用戶所在位置的星歷誤差

式(20)中,Du為用戶所在位置對應的迭代矩陣, 其有 6 種形式。 式(21)以模型 2(式(17)中i=2的情況)為例,可表示為

式(21)中,Du的行數等于差分站數量,q1u和q2u分別為用戶所在位置的經度和緯度。
改正后的殘余星歷誤差ε=Δρ-V。
為了驗證上述6種低次曲面模型的改正效果,利用6個均勻分布的差分站(位于西安、長春、上海、烏魯木齊、三亞、拉薩)與5顆由GEO、MEO和IGSO衛星組成的混合星座進行實驗。衛星1、衛星4、衛星5選用GPS中的MEO衛星,衛星2、衛星3分別選用北斗衛星導航系統中的GEO衛星和IGSO衛星,這5顆衛星在北京時間04:00~05:00對這6個差分站都是可視的,其中衛星1作為基準星,不改正[11]。在實驗數據中,衛星1、衛星4、衛星5的真實星歷用國際GNSS服務組織發布的精密星歷代替,衛星2、衛星3的真實星歷用武漢大學GNSS研究中心發布的精密星歷代替,廣播星歷及偽距觀測值來自中國科學院國家授時中心的雙頻接收機,采樣頻率為5min,通過內插讓真實星歷和廣播星歷均為1s/次。在74°E~138°E與9°N~49°N 格網范圍內, 偽距誤差在經過電離層誤差改正、對流層誤差改正、偽碼噪聲平滑、星鐘誤差一站式改正、站鐘偏差消除后,剩余量為星歷誤差。通過曲面模型法在經度和緯度方向每隔4°計算一個改正后的殘余星歷誤差ε,用ε的最大值εmax和最小值εmin、標準差σ和平均數εE表征模型的精度,實驗結果如表1所示[12]。
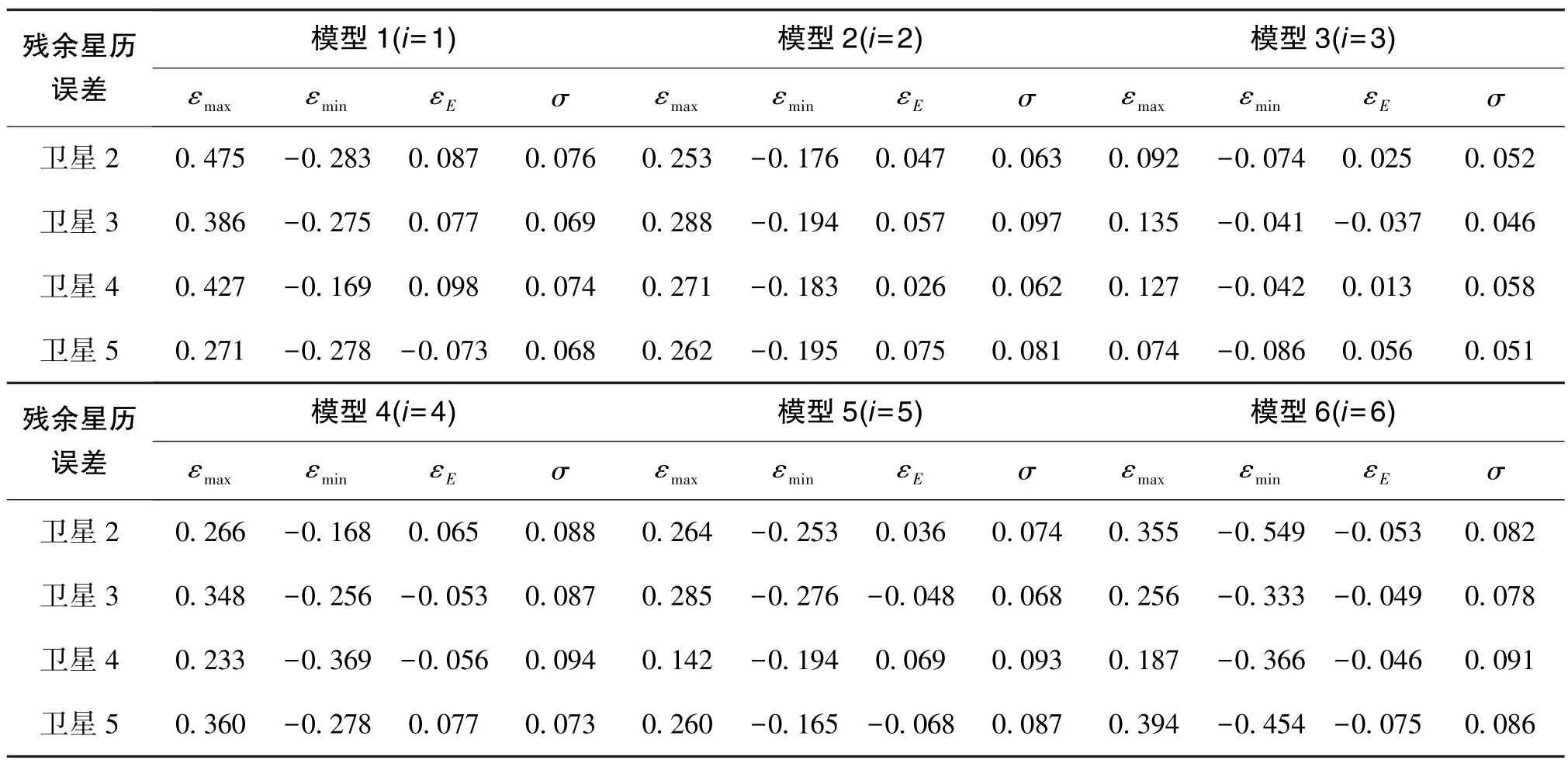
表1 曲面模型改正后的殘余星歷誤差Table 1 Residual ephemeris error after curved surface model correction
從表1可以看出:1)對GEO、MEO和IGSO這3種混合星座,曲面模型改正后的殘余星歷誤差的均值都小于0.1m,誤差的標準差都小于0.1m,這表明低次曲面模型法達到了較高的精度;2)模型3改正后,GEO、MEO和IGSO這3種混合星座衛星的殘余星歷誤差的最大值、最小值、平均數和標準差的絕對值都是最小的,這表明模型3的改正效果最好。其中,殘余星歷誤差小于0.15m,誤差的均值小于0.06m,誤差的標準差小于0.06m。
2.2 電離層延遲誤差及修正方法
大氣中的電離層在X射線和紫外線的強烈作用下,會導致一部分氣體分子產生電離化,生成大量的自由電子。當北斗衛星的信號穿越該部分氣體時,受自由電子的影響,傳播速度發生改變,從而產生誤差。
引用電離層修正模型Klobuchar,晚上時延為λ=5×10-9s,比較穩定;白天的電離層時延則可通過下式求得

式(22)中,I為電離層時延函數振幅,單位為s;P為電離層時延函數周期,單位為s;t′為測量時刻為t時電離層穿刺點的時刻,單位為h。
對于雙頻接收機,由觀測量組合原理可知,構造特定的雙頻觀測量組合可以將電離層一階誤差項完全消除。偽距觀測量的雙頻消電離層組合公式可表示為

式(23)中,P1和P2分別為頻點L1和L2的偽距觀測量,f1和f2分別為頻點L1和L2的頻率。
載波相位觀測量的雙頻消電離層組合公式可表示為
式(24)中,φ1和φ2分別為頻點L1和L2的載波相位觀測量。采用上述兩種電離層改正方案分別對兩個觀測站的北斗衛星觀測數據以精密單點定位模式進行解算,通過實際解算結果評估兩種電離層改正方案在不同定位模式下的改正效果[13]。
通過Klobuchar模型和雙頻組合消電離層模型兩種電離層延遲改正方法,對位于我國境內的北京和香港觀測站在2019年9月9日的GPS測量數據進行分析,從而比較兩種方法的修正精度[14]。表2為這兩個觀測站在不同電離層改正方案下不同時間的北斗衛星單點定位結果的匯總。
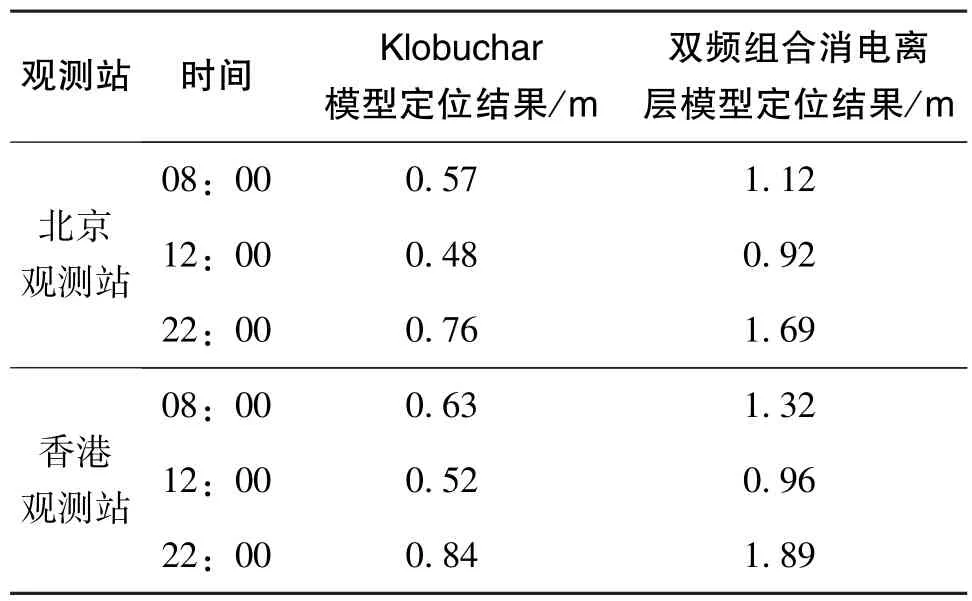
表2 兩種電離層改正方案下的單點定位結果Table 2 Single point positioning results under twoionospheric correction schemes
利用實測GPS數據分別對Klobuchar模型和雙頻消電離層組合模型兩種GPS電離層改正方法在定位解算時的改正效果進行評估[15],依據實驗數據得到結論:在GPS精密單點定位解算時,采用雙頻消電離層組合模型能獲得精度更高的定位結果。
2.3 對流層延遲誤差修正方法
對于導航信號而言,對流層是非彌散介質,不能運用雙頻或三頻觀測來進行延遲對流層的運算工作。雖然應用差分運算可以有效減小由延遲誤差造成的影響,但是差分計算只能應用于與基準站距離較近、高差較小的流動站,其在其他情況下較難獲得應用[16]。
由于對流層的影響因素多,許多因素又帶有較大的隨機性,導致對流層延遲具有很多不規則的變化。BP神經網絡通過其學習、記憶和計算等功能,可從環境信息復雜、推理規則不明確的非線性空間系統中挖掘出隱含的規律。利用BP神經網絡技術可以對現有對流層延遲改正模型進行修正,進而實現對流層延遲變化的擬合。遺傳算法是一種概率搜索算法,它的基本思想是通過全面模擬自然選擇和遺傳機制,通過對種群個體的選擇、雜交和變異形成一種具有 “生成+檢驗”特征的搜索算法。針對BP神經網絡在學習過程中容易陷入局部最小值或過度擬合的情況,可利用遺傳算法的 “自適應”和 “自進化”原理,優化神經網絡的初始權值和閾值,改善神經網絡學習能力的可靠性和穩定性[17]。
針對目前對流層研究領域沒有把遺傳算法和BP神經網絡技術結合應用于建立預測模型這一現象,本文在EGNOS模型基礎上利用遺傳算法和BP神經網絡技術,消除EGNOS模型在北美洲區域的誤差,建立了一種無需大量初始數據的高精度區域融合模型(GA-BPEGNOS)。
EGNOS模型是根據全球平均氣象資料建立的改正模型,其緯度格網劃分比較稀疏,無法準確描述小區域范圍內的對流層延遲的變化規律。針對上述特點,本文通過遺傳算法和BP神經網絡技術,在基于EGNOS模型的基礎上建立了一種高精度區域融合模型,構建融合模型的網絡結構如圖1所示。

圖1 融合模型的網絡結構Fig.1 Network structure of fusion model
融合模型(GA-BPEGNOS)構建的具體過程如下:
1)融合模型網絡的拓撲結構:構建一個5×N×1的BP神經網絡模型(N為隱含層節點個數),將地面觀測站的經度、緯度、高度、時間及觀測站處利用EGNOS模型計算的ZTD數據EGNOS-ZTD作為輸入層,輸入層節點數為5;將利用遺傳算法和BP神經網絡技術結合模型計算出的多元線性回歸延遲誤差GA-BPEGNOS-ZTD作為輸出層,輸出層節點數為1;本文采取遺傳算法和神經網絡相結合的方法,將隱含層節點個數N設置為10~30,并根據每次計算輸出的結果確定最佳隱含層節點個數N。
2)遺傳算法:首先進行數據輸入和數據預處理,然后對初始值進行編碼,根據BP神經網絡的適應度值。通過遺傳算法中的選擇操作、交叉操作和變異操作,不斷優化神經網絡的權值和閾值,直至滿足條件。
3)BP神經網絡算法:BP神經網絡模型的網絡參數包含學習速率η、平滑因子α、學習誤差E。通過多次嘗試計算,學習速率η的取值范圍為[0.5,2.0],平滑因子α的取值范圍為[0.4,0.9],學習誤差控制E的取值范圍為[0.005,0.015]。利用IGS中心提供的高精度對流層延遲產品和遺傳算法得到的優化權值和閾值,對建立的BP神經網絡結構進行測試。
4)融合模型對流層延遲:根據BP神經網絡預測的對流層延遲殘差BP-RES和EGNOS模型計算的觀測站對流層延遲EGNOS-ZTD,得到融合模型的對流層延遲 GA-BPEGNOS-ZTD(GA-BPEGNOSZTD為 BP-RES和 EGNOS-ZTD之和),GA-BPEGNOS-ZTD為融合模型的ZTD,BP-RES為BP神經網絡預測的對流層延遲殘差[18]。
為了驗證融合模型的精度,選取北美洲(10°W~160°W, 10°N~80°N)的41個觀測站點, 以 IGS中心提供的2010年~2014年ZTD產品作為真值進行驗證,其中包含北斗衛星定位數據。以平均偏差(BIAS)和均方根誤差(RMSE)作為評價模型精度的標準,具體算式為
式(25)、 式(26)中,N為檢驗樣本數量,為模型計算的對流層延遲值,IGS_ZTD為對流層延遲真值。EGNOS模型和融合模型計算的平均偏差(BIAS)和均方根誤差(RMSE)如表 3 所示。
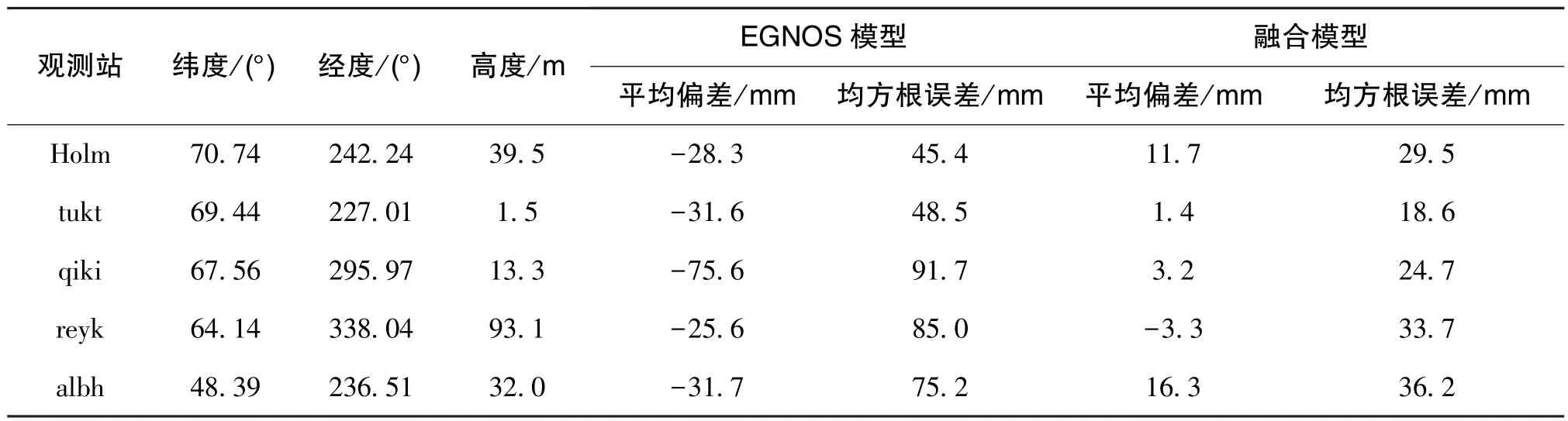
表3 部分檢驗觀測站的平均偏差和均方根誤差Table 3 BIAS and RMSE of some inspection stations
經上述研究,本文得出如下結論:與EGNOS模型相比,基于遺傳算法和BP神經網絡技術的融合模型的精度有顯著提高,據所用觀測站平均偏差(BIAS)和均方根誤差(RMSE)的平均值計算得出的精度提高比例約為52%。
3 結論
北斗導航系統是國之重器,隨著導航系統在軍事領域和民用領域的廣泛應用和普及,導航系統對誤差精度的要求越來越高。本文首先推導了北斗衛星導航系統的定位算法,隨后提出了修正星歷誤差的改進低次曲面模型、對比修正電離層延遲誤差的Klobuchar模型和雙頻組合消電離層模型,以及對流層延遲誤差的高精度區域融合模型,最后對北斗導航系統的定位誤差進行了研究,并給出了相應的減小誤差的解決方案。仿真計算的結果表明,經過修正方法修正后的定位誤差明顯減小,定位精度明顯提高。
猜你喜歡
童話王國·奇妙邏輯推理(2024年5期)2024-06-19 16:03:38
網絡安全與數據管理(2022年1期)2022-08-29 03:15:20
導航定位學報(2022年4期)2022-08-15 08:27:00
中學生數理化·中考版(2022年8期)2022-06-14 06:55:24
新世紀智能(數學備考)(2021年9期)2021-11-24 01:14:36
成都醫學院學報(2021年2期)2021-07-19 08:35:14
新世紀智能(數學備考)(2020年9期)2021-01-04 00:25:14
中學生數理化·七年級數學人教版(2020年10期)2020-11-26 08:24:50
數學物理學報(2020年2期)2020-06-02 11:29:24
光學精密工程(2016年6期)2016-11-07 09:07:19
