機抖激光陀螺捷聯系統動力學建模及結構動特性設計方法
2020-03-04 07:11:04趙欣,魏偉,張杰
導航與控制 2020年6期
關鍵詞:系統
趙 欣,魏 偉,張 杰
(1.北京航天時代激光導航技術有限責任公司,北京100094;2.空裝駐北京地區第四軍事代表室,北京100041;3.北京控制與電子技術研究所,北京100038)
0 引言
激光捷聯慣性導航系統以其性能穩定、工作壽命長、精度高、環境適應性好等優點被廣泛應用于運載航空、航天、武器、艦船、汽車等領域[1]。目前,激光捷聯慣性導航設備主要采用二頻機抖激光陀螺作為其敏感器件,二頻機抖激光陀螺采用抖頻偏頻技術消除了閉鎖效應的影響,從而提高了陀螺的測量精度[2]。陀螺的抖動效率和本體響應與其結構參數密切相關:一方面,結構參數設計不合理可能影響陀螺的抖動幅度,使得陀螺測量精度下降,甚至失去功能[3];另一方面,陀螺抖動成為激光慣導不可避免的激勵源帶動本體產生偽圓錐運動[4-5],對陀螺的測量造成誤差,結構參數設計不合理可能導致本體響應過大,進而降低陀螺的測量精度。
目前,研究結構參數對慣性單元抖動效率及測量誤差的影響主要有兩種方法:1)直接進行多體動力學仿真或有限元仿真[3-6];2)進行動力學理論建模和分析[7-9]。采用有限元仿真的方法相對直觀,但是難以提取規律性的結論;采用動力學理論建模的方法進行研究,更容易找到轉動慣量、頻率、阻尼等結構參數對抖動效率及測量誤差的影響規律。吳美平等[7]較為完整地建立了激光捷聯慣性導航系統的矢量動力學模型,從理論上分析了部分結構參數對圓錐誤差的影響規律。李志華等[8]建立了激光慣組結構系統二自由度動力學模型,能夠對系統抖動效率進行計算。但是,一方面,二自由度系統忽略了箱體剛度和轉動慣量的影響,無法對其影響進行估計;另一方面,該研究也沒有對各關鍵結構參數的影響規律進行具體討論。
本文建立了激光慣導系統三自由度標量動力學模型,并結合Matlab仿真,從工程實際出發,得到了各結構參數對陀螺抖動效率和本體響應的影響規律曲線,總結了基于慣導動特性設計的激光慣導結構設計原則和方法,有利于實現激光慣導結構設計的定量化和標準化。
1 動力學建模
如圖1所示,軟捷聯激光慣導的慣性測量本體(含陀螺、加速度計等慣性敏感器件)通過減振器與箱體實現連接。在慣性測量本體中,陀螺通過抖輪與本體結構實現連接。如圖2所示,對物理系統進行簡化,考察單陀螺的情況,將結構體的彈性和轉動慣量進行分離,將物理系統簡化為三自由度扭簧-質量-阻尼系統進行研究。由結構動力學基本理論[10]可建立激光慣導箱體—本體—陀螺三自由度動力學方程,如式(1)所示。
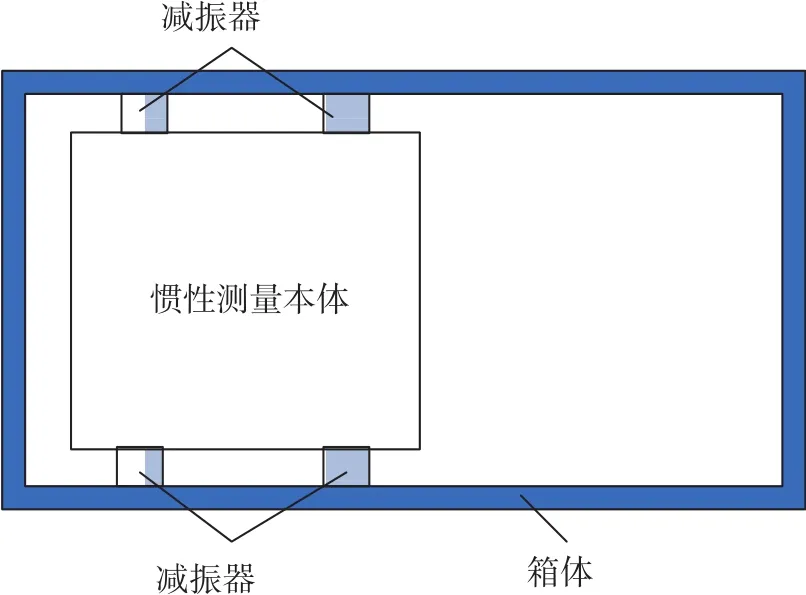
圖1 激光慣導物理模型Fig.1 Physical model of laser inertial navigation system
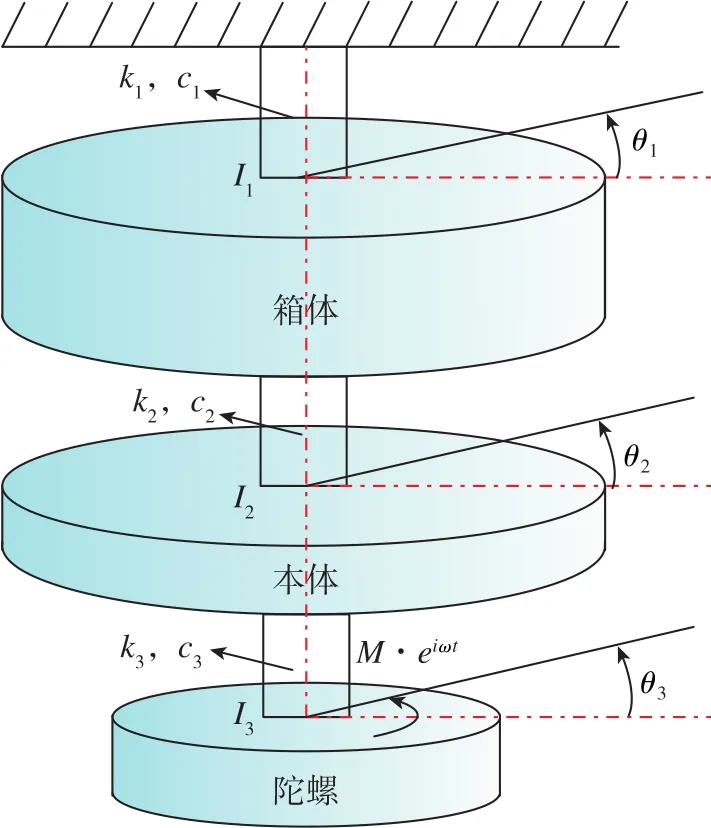
圖2 激光慣導三自由度系統的簡化模型Fig.2 Simplified model of 3-DOF laser inertial navigation system

式(1)中,I1為箱體轉動慣量;I2為本體轉動慣量;I3為陀螺轉動慣量;k1為箱體剛度;k2為減振器剛度;k3為陀螺抖輪剛度;c1為箱體阻尼系數;c2為減振器阻尼系數;c3為陀螺抖輪阻尼系數,包含結構阻尼、安裝阻尼、材料阻尼等;θ1為箱體相對載體系轉角;θ2為本體相對載體系轉角;θ3為陀螺相對載體系轉角;M·eiωt為陀螺抖動驅動力矩,所選取的轉軸方向為陀螺抖動軸方向。
2 方程組求解
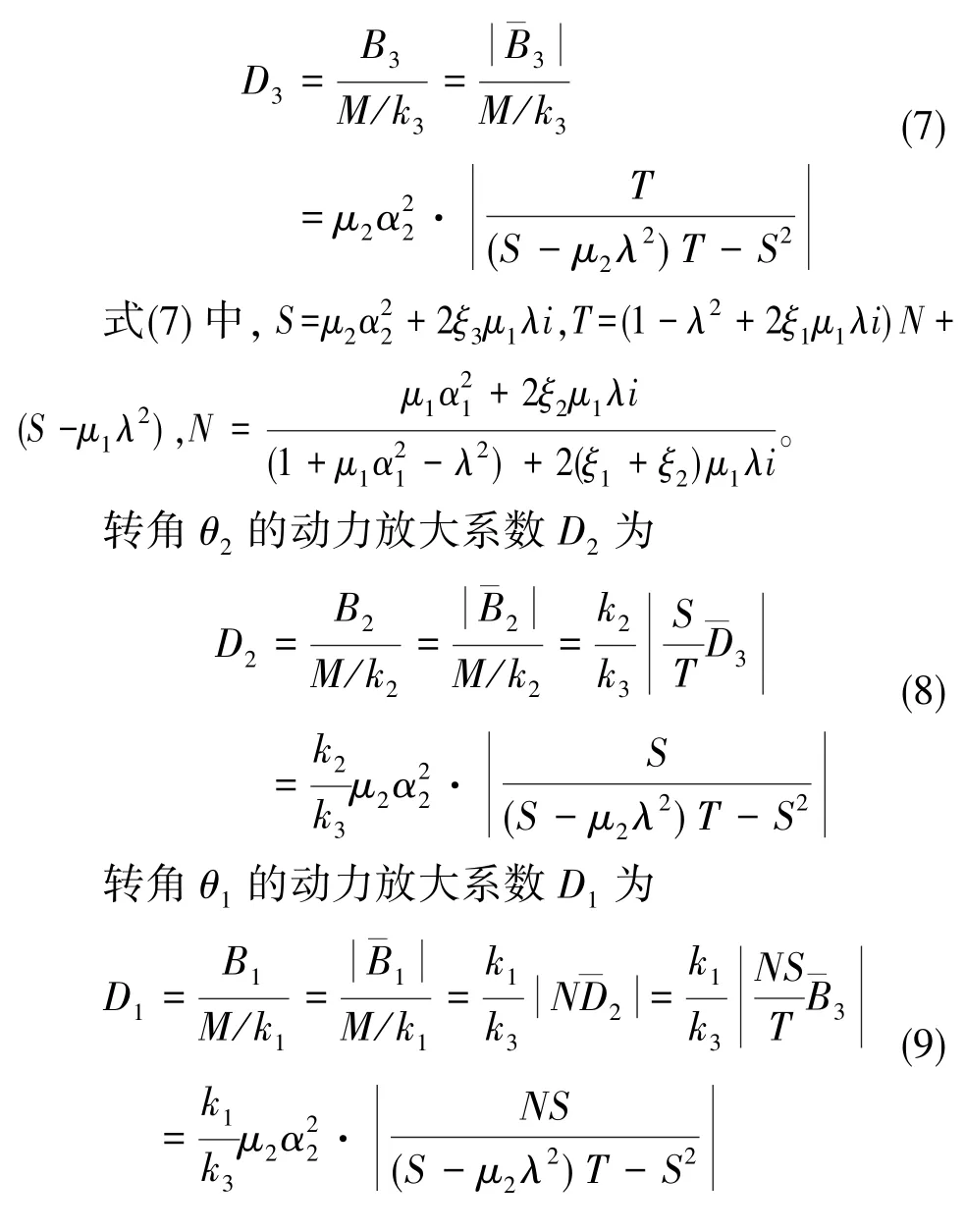
將式(2)~式(6)代入式(1)中, 經推導可得轉角θ3的動力放大系數D3
3 參數獲取與模型仿真驗證
在推導出D1、D2、D3的表達式后,只需要確定系統參數即可精確求解。其中,I1、I2、I3(轉動慣量)可通過CAD模型從工具軟件中直接獲取;p1、p2、p3(頻率)和c1、c2、c3(阻尼)可通過產品試驗獲得;k1、k2、k3(剛度)可通過相應的轉動慣量和頻率求取。得到系統參數后,可通過Matlab求取系統幅頻響應曲線,如圖3~圖5所示。
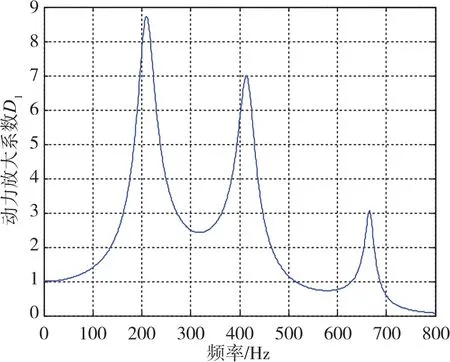
圖3 陀螺抖動激勵下箱體響應動力放大系數隨激勵頻率變化曲線Fig.3 Response curve of the shell dynamic amplification factor with excitation frequency under gyroscope dither excitation

圖4 陀螺抖動激勵下本體響應動力放大系數隨激勵頻率變化曲線Fig.4 Response curve of the IMU dynamic amplification factor with excitation frequency under gyroscope dither excitation
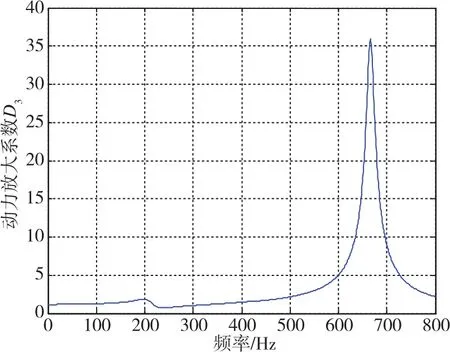
圖5 陀螺抖動激勵下抖輪響應動力放大系數隨激勵頻率變化曲線Fig.5 Response curve of the dither mechanism dynamic amplification factor with excitation frequency under gyroscope dither excitation
經實際測試,安裝于固定支座的單陀螺抖動放大系數一般為20~40,在計算中采用的抖輪安裝阻尼比為0.0125。

當將三自由度系統設置為質量無窮大或剛度無窮大時,都可以將一個三自由度系統等效為二自由度系統。將二自由度系統設置為質量無窮大或剛度無窮大時,都可以將其簡化為一個單自由度系統。在三自由度模型中,將I1設置為一個較大值進行計算,結果如圖6所示,這個結果與二自由度系統的計算結果完全一致。將I1和I2同時設置為一個較大值進行計算,結果如圖7所示,這個結果與單自由度系統的計算結果完全一致。由此,三自由度系統的模型正確性可以得到驗證。
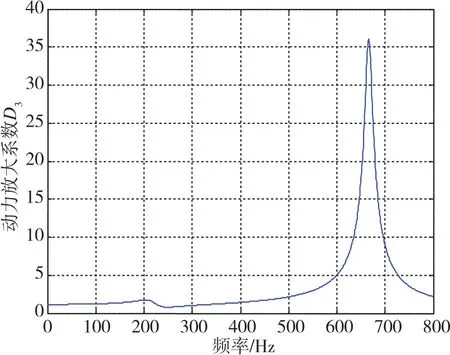
圖6 三自由度系統I1設置為一個較大值時得到的陀螺響應曲線Fig.6 Response curve of gyroscope when I1has a large value
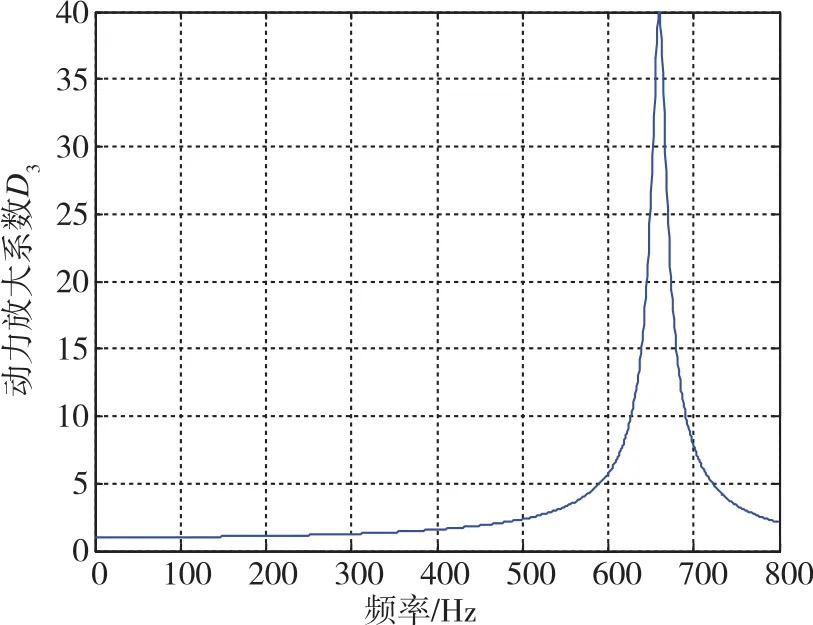
圖7 三自由度系統I1和I2均設置較大值時得到的陀螺響應曲線Fig.7 Response curve of gyroscope when I1 and I2have large values
4 陀螺抖動激勵下慣導結構參數對抖動效率的影響
抖動效率是指以陀螺抖動固有頻率為載荷頻率對陀螺抖動系統施加交變電壓時的陀螺響應反饋電壓幅與激勵電壓幅之比,即

陀螺抖動動力放大系數是載荷頻率與陀螺抖動系統固有頻率相同或接近時陀螺響應幅值與靜載荷激勵下陀螺響應的比值,即

抖動效率與陀螺抖動動力放大系數都能夠反應抖動系統輸入與輸出的關系,即在陀螺抖動動力系統中,動力放大系數大的系統抖動效率一定高。
圖8~圖15分別以陀螺抖動固有頻率(圖8)、陀螺抖輪安裝阻尼(圖9)、本體轉動慣量(圖10)、減振器剛度(圖11)、減振器阻尼系數(圖12)、箱體轉動慣量(圖13)、箱體剛度(圖14)、箱體阻尼系數(圖15)為變量考察陀螺抖動動力放大系數的變化情況。
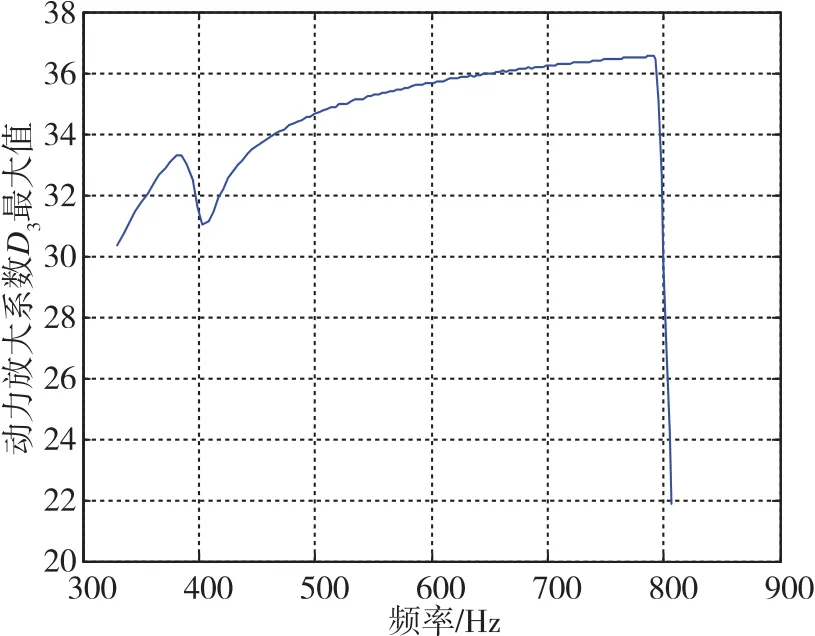
圖8 陀螺響應動力放大系數隨陀螺抖頻變化曲線Fig.8 Response curve of the gyroscope dynamic amplification factor with the dither frequency
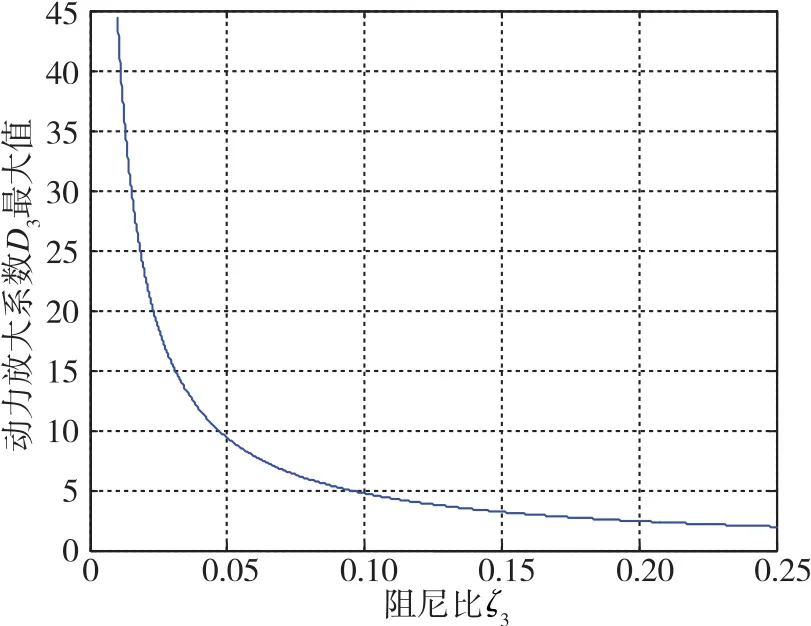
圖9 陀螺響應動力放大系數隨陀螺抖輪阻尼變化曲線Fig.9 Response curve of the gyroscope dynamic amplification factor with the dither mechanism damping

圖10 陀螺響應動力放大系數隨本體轉動慣量變化曲線Fig.10 Response curve of the gyroscope dynamic amplification factor with the IMU rotational inertia
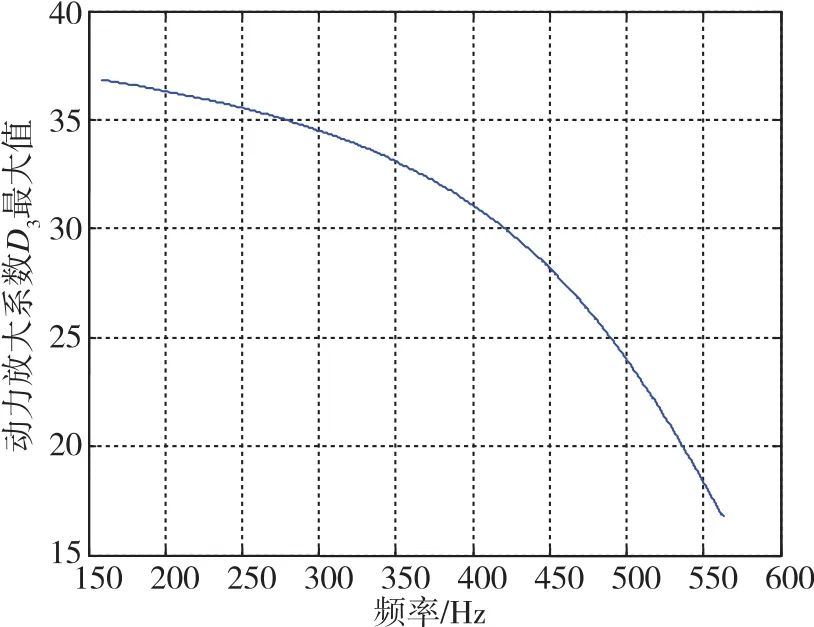
圖11 陀螺響應動力放大系數隨減振器剛度變化曲線Fig.11 Response curve of the gyroscope dynamic amplification factor with the absorber stiffness
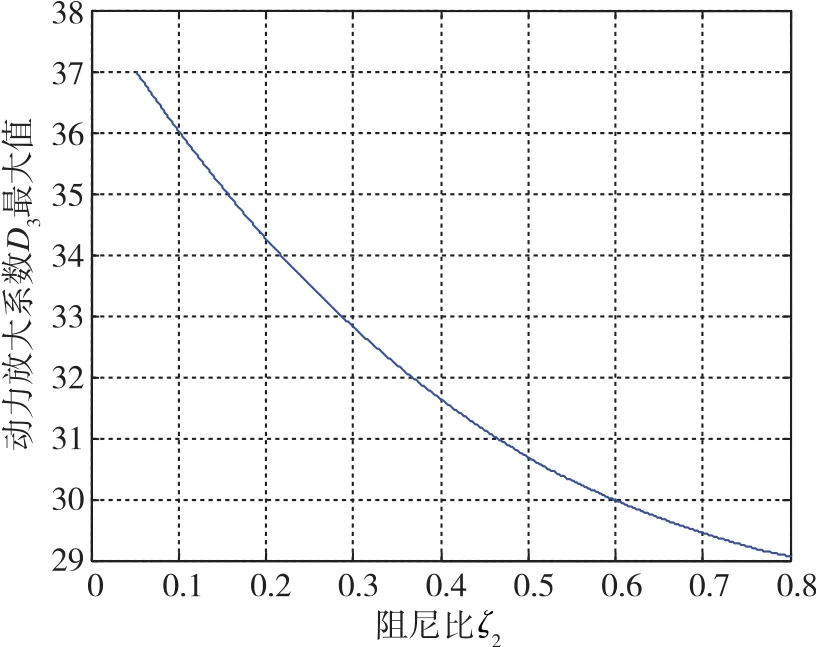
圖12 陀螺響應動力放大系數隨減振器阻尼變化曲線Fig.12 Response curve of the gyroscope dynamic amplification factor with the absorber damping

圖13 陀螺響應動力放大系數隨箱體轉動慣量變化曲線Fig.13 Response curve of the gyroscope dynamic amplification factor with the shell rotational inertia
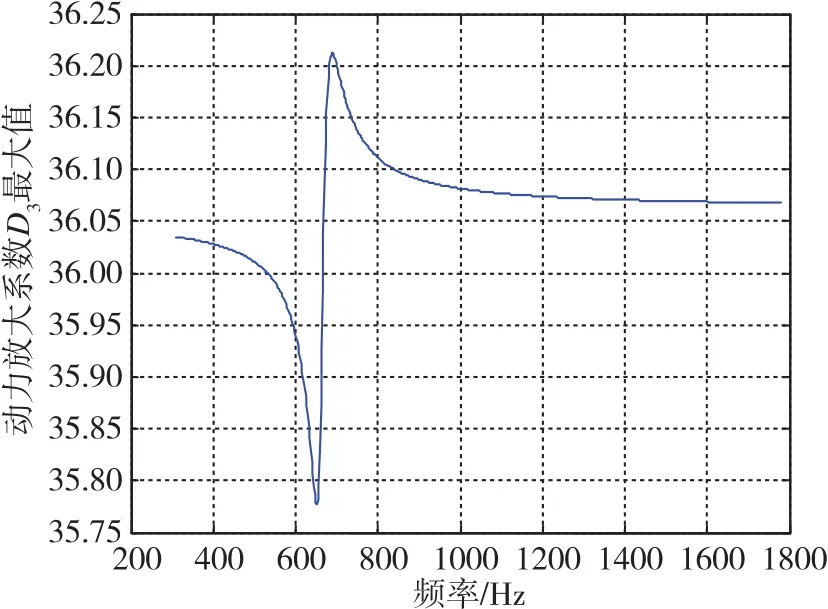
圖14 陀螺響應動力放大系數隨箱體結構剛度變化曲線Fig.14 Response curve of the gyroscope dynamic amplification factor with the shell stiffness
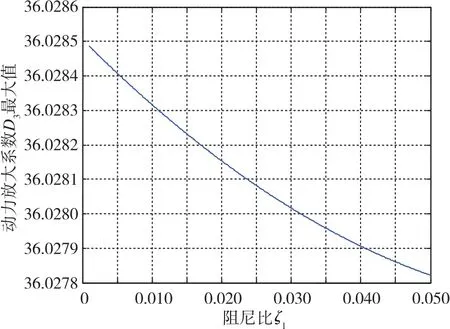
圖15 陀螺響應動力放大系數隨箱體阻尼變化曲線Fig.15 Response curve of the gyroscope dynamic amplification factor with the shell damping
由圖8~圖15可得到如下結論:
1)減振器剛度不變時,陀螺抖動動力放大系數隨本體轉動慣量增加而增大,動力放大系數在轉動慣量量值較小的區間內可能發生急劇變化;
2)減振器固有頻率不變時,陀螺抖動動力放大系數隨本體轉動慣量增加而增大;
3)本體轉動慣量不變時,陀螺抖動動力放大系數隨減振器剛度降低而增大;
4)在陀螺抖頻不超過790Hz時,陀螺抖動動力放大系數隨陀螺抖頻增加而增大;
5)陀螺抖動動力放大系數隨陀螺抖輪安裝阻尼增加而減小,阻尼比在0~0.05的陀螺抖動動力放大系數可能發生急劇變化;
6)陀螺抖動動力放大系數隨箱體剛度、阻尼、轉動慣量的變化都不明顯。
可見,在陀螺為選定型號的情況下,為了得到較大的陀螺抖動效率,應使得安裝阻尼盡可能小,本體轉動慣量盡可能大,減振器剛度盡可能小,同時應盡可能挑選抖頻較大的陀螺。
5 陀螺抖動激勵下慣導結構參數對測量精度的影響
軟捷聯激光慣導系統在線振動環境下可能引發慣性測量本體(IMU)發生偽圓錐運動,給測量帶來誤差[3,9];在靜載荷環境下,內部陀螺抖動激勵同樣可以引發慣性測量本體(IMU)發生偽圓錐運動[4],給測量帶來誤差。可見,圓錐誤差的大小與IMU的運動密切相關,盡量減小IMU的運動量級可以有效減小圓錐誤差。
在前文所述三自由度模型中,考察本體的運動,可以揭示慣導結構參數對慣導測量精度的影響規律,有效指導設計。因此,仍對該模型進行仿真計算,得到了各結構參數對慣導測量精度的影響規律。
圖16~圖23分別以陀螺抖動固有頻率(圖16)、陀螺抖輪安裝阻尼(圖17)、本體轉動慣量(圖18)、減振器剛度(圖19)、減振器阻尼系數(圖20)、箱體轉動慣量(圖21)、箱體剛度(圖22)、箱體阻尼系數(圖23)為變量考察本體響應動力放大系數的變化情況。
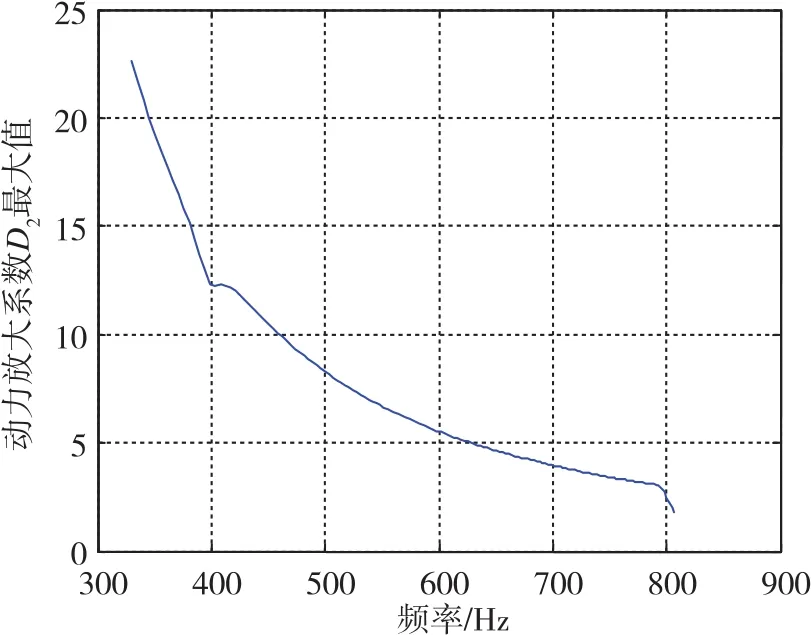
圖16 本體響應動力放大系數隨陀螺抖頻變化曲線Fig.16 Response curve of the IMU dynamic amplification factor with the dither frequency
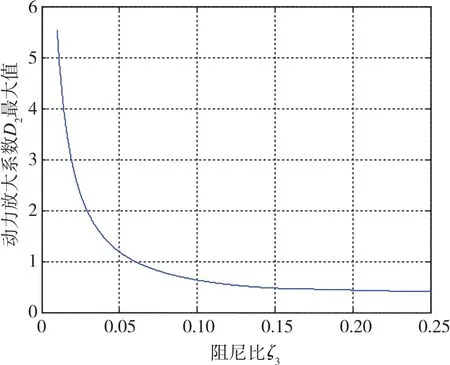
圖17 本體響應動力放大系數隨陀螺抖輪阻尼變化曲線Fig.17 Response curve of the IMU dynamic amplification factor with the dither mechanism damping
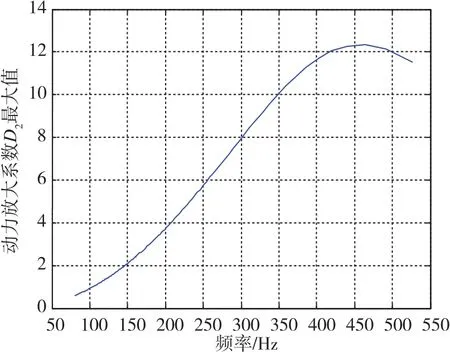
圖18 本體響應動力放大系數隨本體轉動慣量變化曲線Fig.18 Response curve of the IMU dynamic amplification factor with the IMU rotational inertia
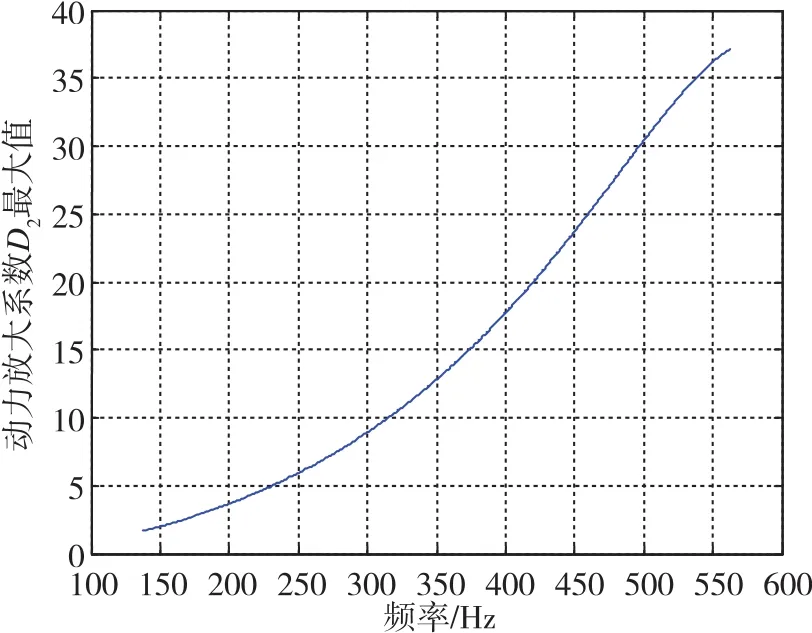
圖19 本體響應動力放大系數隨減振器剛度變化曲線Fig.19 Response curve of the IMU dynamic amplification factor with the absorber stiffness

圖20 本體響應動力放大系數隨減振器阻尼變化曲線Fig.20 Response curve of the IMU dynamic amplification factor with the absorber damping
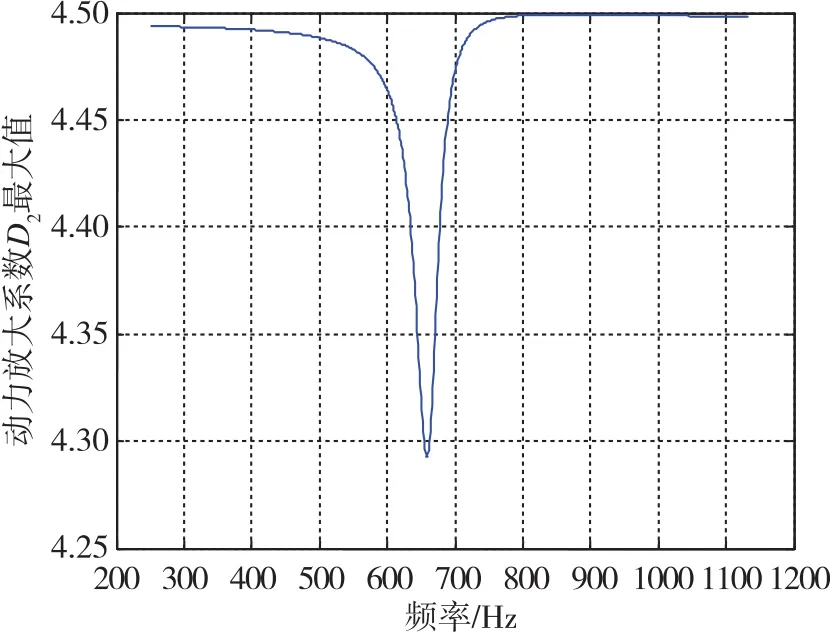
圖21 本體響應動力放大系數隨箱體轉動慣量變化曲線Fig.21 Response curve of the IMU dynamic amplification factor with the shell rotational inertia

圖22 本體響應動力放大系數隨箱體結構剛度變化曲線Fig.22 Response curve of the IMU dynamic amplification factor with the shell stiffness

圖23 本體響應動力放大系數隨箱體阻尼變化曲線Fig.23 Response curve of the IMU dynamic amplification factor with the shell damping
由圖16~圖23可得到如下結論:
1)減振器剛度不變時,本體響應動力放大系數隨本體轉動慣量增加而減小;
2)減振器固有頻率不變時,本體響應動力放大系數隨本體轉動慣量增加而增大;
3)本體轉動慣量不變時,本體響應動力放大系數隨減振器剛度降低而減小;
4)本體響應動力放大系數隨陀螺抖頻增加而減小;
5)本體響應動力放大系數隨減振器阻尼增加而減小;
6)本體響應動力放大系數隨箱體剛度、阻尼、轉動慣量的變化都不明顯。
可見,在陀螺為選定型號的情況下,為了得到較小的本體響應,應使得本體轉動慣量盡可能大,減振器剛度盡可能小,同時應盡可能挑選抖頻較大的陀螺。獲得較小的本體響應與得到較大的抖動效率的結論基本是一致的,但是需要注意陀螺安裝阻尼的減小會同時增大本體的響應,在設計時需要綜合考慮。如果陀螺抖動效率嚴重不足而本體響應較小,應考慮適當減小陀螺的安裝阻尼。
6 結論
本文基于結構動力學理論對機抖激光捷聯系統進行了三自由度動力學建模、解答和分析,分別得到了箱體轉動慣量、箱體剛度、箱體阻尼、減振器剛度、減振器阻尼、本體轉動慣量、陀螺抖頻、陀螺安裝阻尼對陀螺響應和本體響應的影響規律。其中,陀螺響應的大小反應了陀螺抖動效率的高低,本體響應的大小反應了圓錐誤差的大小,與陀螺測量精度相關。基于上述規律,可以得到在陀螺為選定型號情況下激光慣導結構的動特性設計方法。
慣導結構參數設計應以以下原則為指導:
1)在滿足質量要求的前提下,本體轉動慣量應盡可能大;
2)在滿足載體系統頻率要求的情況下,減振器剛度應盡可能小;
3)在選定型號的陀螺中,應盡可能挑選抖頻較大的陀螺;
4)陀螺安裝阻尼的大小需結合實際情況設計,當陀螺抖動效率嚴重不足而本體響應較小時,應考慮適當減小陀螺的安裝阻尼;
5)箱體的結構質量、剛度和阻尼在無外載荷激勵條件下對陀螺抖動效率和本體響應的影響均較小,可據此適當進行減重設計。
猜你喜歡
工業設計(2022年8期)2022-09-09 07:43:20
軍民兩用技術與產品(2021年10期)2021-03-16 06:05:30
北京測繪(2020年12期)2020-12-29 01:33:58
裝備制造技術(2019年12期)2019-12-25 03:06:46
制造技術與機床(2019年10期)2019-10-26 02:47:06
中國洗滌用品工業(2019年4期)2019-05-11 09:27:34
鐵道通信信號(2018年5期)2018-06-28 03:06:24
家庭影院技術(2017年9期)2017-09-26 03:41:45
知識經濟·中國直銷(2017年5期)2017-06-15 20:28:19
通信電源技術(2016年6期)2016-04-20 06:21:32
