超空泡射彈小入水角高速斜入水試驗研究
2020-03-05 11:28:16侯宇黃振貴郭則慶陳志華劉如石羅馭川
兵工學報 2020年2期
侯宇, 黃振貴, 郭則慶, 陳志華, 劉如石, 羅馭川
(南京理工大學 瞬態物理國家重點實驗室, 江蘇 南京 210094)
0 引言
入水過程是入射體從空氣中穿過氣體與液體交界面進入水中的過程,高速入水過程會瞬間出現巨大的沖擊載荷,伴有強烈的水下壓力波的產生,同時形成包裹彈體的超空泡,這對空投魚雷、超空泡射彈等水下航行體結構強度、隱身性能和彈道穩定性提出了嚴峻的挑戰。
對于航行體入水問題的研究已有一個世紀,最早始于對剛性球體垂直入水的試驗,研究入水空泡演化過程[1]、球體運動阻力特性[2-3]等,首次提出了噴濺、空泡閉合方式等概念。隨著入水問題研究的進一步深入,國內外學者取得了一定的成果。對于剛性球體,Truscott等[4]采用對稱轉輪的夾持裝置對球體自旋入水進行了試驗,研究自旋速度對球體入水空泡演化和運動特性的影響。對于回轉體射彈模型,研究更多地關注頭型對射彈入水過程的影響,陳先富[5]分別對錐頭圓柱體和圓鋼珠水平高速(720~1 370 m/s)入水進行了試驗研究,研究2種彈丸對入水空穴演化的影響;張偉等[6]進行了3種頭型彈丸水平高速(<160 m/s)入水試驗,研究不同頭型對入水彈道的影響;楊衡等[7]和路麗睿等[8]分別對不同頭型射彈60°和55°傾斜低速(<6 m/s)入水進行了試驗研究,分析了頭型和入水速度對入水空泡和彈道特性的影響;王云等[9]對斜截頭彈體30°傾斜入水(62~140 m/s)進行了試驗,研究頭型引起的彈體跨介質入水彈道彎曲的現象;施紅輝等[10]進行了不同頭型鈍體18°傾斜和垂直入水試驗(<100 m/s),分析了不同工況下空泡形成和彈體運動軌跡變化;蔣運華等[11-12]對圓盤空化器航行體開展了垂直和斜入水試驗研究,分析了弗勞德數、入水角度(45°~90°)和通氣率對空泡尺寸、噴濺閉合時間和位置的影響;周杰等[13]對錐柱彈丸300~400 m/s和1 800 m/s傾斜入水進行了試驗研究,分析了2種速度下氣水界面的沖擊波系和流場結構變化;陳誠等[14-15]利用內置慣性測量單元對超空泡航行器20°角傾斜入水(44~90 m/s)進行了試驗,并結合數值模擬研究空化器直徑對入水過程中沖擊載荷變化特性的影響;Chen[16]分別對3種頭型射彈90°和80°入水(44~150 m/s)進行試驗研究,分析了3種頭型對彈道穩定性和水下壓力波峰值的影響。
綜上所述,目前針對射彈入水的試驗入水角度范圍為15°~90°,關注點著重在入水時物體所受沖擊載荷和入水空泡演化,對于高速下更小入水角的入水試驗研究較少。Truscott等[17]對子彈以5°~15°入水角、380 m/s速度斜入水進行了試驗研究,觀察了在淺水區超空泡的形成和發展,但其未研究入水時彈體姿態對噴濺演變、彈丸結構和入水后物體運動軌跡的影響,此外,入水沖擊所誘導產生的水下壓力波遠距離傳播變化規律也未見報道。
考慮到水下攻防武器多傾斜發射于存在隨機波浪的水面,實際應用中存在更小的射彈入水角度。因此,本文采用高速攝像技術等構建的水靶道試驗技術對超空泡射彈8°入水角高速斜入水過程開展試驗研究,研究其入水瞬間彈體姿態對彈道穩定性和噴濺演化特性的影響。同時在試驗水域均勻布置壓力傳感器,監測流場壓力變化,研究入水過程中水下壓力波的傳播變化規律,為今后入水航行體的彈道控制和入水沖擊壓力波的監測分析提供數據參考和試驗指導。
1 試驗方案和試驗模型
1.1 試驗系統
斜入水試驗系統示意圖如圖1所示,試驗在35 m×2.4 m×2.4 m水靶道中進行,水深約2.2 m,水池兩側和底部均由鋼板焊接制成,彈道終點采用鋼制材料防護。試驗采用12.7 mm口徑滑膛彈道槍為發射裝置,槍口高度H約3.73 m,槍管軸線與水平面夾角α為8°. 彈體出膛后至入水點的飛行距離約為10 m,空中飛行時間約15 ms. 因空中飛行過程中受到的擾動量級遠小于水中,為方便分析,可假設在空中階段彈丸速度方向和大小變化很小,α可看作是彈體入水速度v0與水平面的夾角,即入水角。速度矢量v位于水靶道鉛垂對稱面上,vx為v在x軸方向上的投影。入水點側方和正上方分別布置一臺高速攝影記錄入水瞬間空泡形成過程和彈道特征,其中側方為灰度攝影,上方為彩色攝影,拍攝頻率分別為2 800幀/s和6 000幀/s,相機均套有塑料防水袋,以避免水花濺射損壞相機。池底拍攝視界內布有黑白相間的坐標尺,用于校準高速攝影位移和尺寸測量結果。同時位于水下沿彈體飛行軌跡左側1、2、3、4高度等距分別布置1對壓電式測壓傳感器(A1、A2、A3、A4和B1、B2、B3、B4),用于測量入水沖擊瞬間周圍水域壓力變化,系統實物照片如圖2所示。

圖1 試驗系統示意圖Fig.1 Schematic diagram of experimental system

圖2 試驗系統實物圖(視向為彈道終點指向發射點)Fig.2 Photo of experimental system (the visual direction is from the ballistic end to the launch point)
1.2 試驗模型
圖3為超空泡射彈模型俯視圖,由空化器、圓錐段、圓柱段和尾部組成。彈長為l,圓柱段最大直徑為D,空化器直徑為d,重心距前端面距離約0.34l.θ為射彈的偏航角,即彈軸在水平面的投影與慣性坐標系Ox軸的夾角。彈身采用鋁合金材料,彈頭部圓錐段采用鎢合金,整個彈體通過螺紋連接而成,總質量m為0.104 kg,采用火藥發射。

圖3 超空泡射彈試驗模型(俯視圖)Fig.3 Experimental model of supercavitating projectile (top view)

圖4 射彈入水時側滑角示意圖Fig.4 Schematic diagram of sideslip angle of projectile at the water-entry time
為描述入水時彈體姿態的微小偏轉分別建立慣性坐標系Oxyz和彈體坐標系Ox′y′z′,如圖4所示:Ox軸平行于水面指向彈道末端,Oy軸垂直于水平面豎直向下,Oz軸垂直于面Oxy指向射彈飛行左側;入水速度矢量v0處于Oxy平面上,面Ox′y′為過彈軸的彈體縱向對稱面;Q為速度v0終點F向面Ox′y′作垂線形成的垂點,則側滑角β=FOQ,即射彈入水速度矢量與彈體縱向對稱面的夾角。根據入水點上方高速攝像圖片可測量出θ角,如圖3所示,并結合入水角α,即可求出彈體側滑角β,利用向量幾何的知識可求得:
β=90°-arccos(sinθcosα).
(1)
試驗彈丸是回轉體軸對稱模型,且飛行過程中無自旋,故討論時只考慮側滑角大小的影響。試驗中多次進行射彈8°入水角相同發射條件下斜入水試驗,試驗測得入水初速v0范圍640~655 m/s,速度變化較小,可忽略速度變化所導致的影響。因射彈加工誤差裝彈后彈身在膛內存在微小偏斜和火藥氣體對彈身的沖擊作用,彈體入水時側滑角會隨機出現相應的變化,其范圍處于0°~20°,而在2°~7°范圍內變化的重復性較好。選取側滑角近似線性變化的4種典型試驗工況作對比分析,表1為選取的工況參數。

圖5 側滑角為2.4°時射彈入水過程Fig.5 Water entry of projectile for β=2.4°
表1 試驗工況參數
Tab.1 Parameters for different experimental conditions
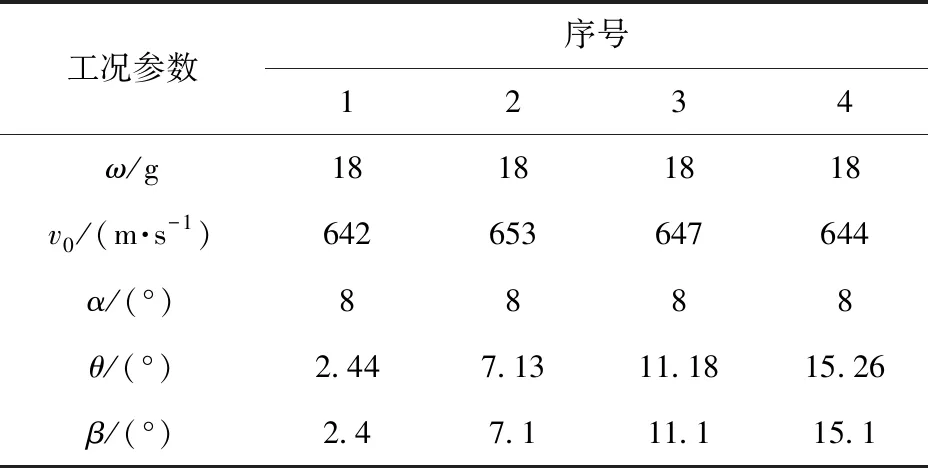
工況參數序號1234ω/g18181818v0/(m·s-1)642653647644α/(°)8888θ/(°)2.447.1311.1815.26β/(°)2.47.111.115.1
注:ω為裝藥量。
2 試驗結果與分析
2.1 不同工況下入水彈道特性
根據試驗中彈體入水時側滑角的不同來對比分析彈道特性。圖5是β為2.4°時上方和側方高速攝像拍攝的射彈入水過程,可見高速射彈在1 ms內即可完成入水過程。彈體自右向左于1.58~1.83 ms間撞擊水面,射彈在跨介質沖擊瞬間(1.83 ms)將部分能量傳遞給彈頭附近水域,水域流體質點獲得遠離沖擊接觸面的動量,使得水面上彈頭前方和彈肩兩側立即出現白色的霧狀噴濺,并逐漸形成左右近似對稱的“蝶”狀水幕(沿射彈飛行方向觀察)。射彈于2.16 ms完全進入水中,自彈頭部向后誘導生成包裹整個彈體的空泡,空泡壁光滑,空泡透明度較高,空泡包裹的彈體與入水前相比姿態沒有明顯變化。
觀察圖5(b)可知,彈體入水瞬間沿著彈體飛行方向水面上出現向前翻卷的“鰭狀”噴濺,彈體在入水空泡內存在尾部向下傾斜的現象。原因是小入水角下,彈頭圓錐段斜面與水面的拍擊為彈體提供一個順時針的力矩,整個彈身出現微小的順時針偏轉。總體來看,該工況下彈體入水過程較為理想,空化效果明顯,入水能形成包裹射彈透明度較高的穩定空泡,沖擊過程中彈體未發生較大偏轉翻滾,彈道軌跡未明顯彎曲。

圖6 不同側滑角下射彈入水過程(俯視圖)Fig.6 Water entry processes of projectile at different sideslip angles (top view)
圖6為彈體側滑角逐漸增加時射彈以8°角入水過程的俯視圖。相比工況1,隨著β的增加,射彈與空泡壁碰撞強度逐漸增加,入水空泡內白色霧滴逐漸增多,透明度逐漸下降,射彈輪廓不清晰,空化效果較差,彈道彎曲程度逐漸增大。β增加至15.1°時,彈體在2.33~2.83 ms間出現了碎裂分解。
分析認為:入水β增加,彈身過度傾斜使單側彈身與空泡壁面持續接觸,彈身左右兩側持續受力不均勻,給彈體提供側向加速度,致使彈體軌跡發生偏轉。傾斜的彈身使彈體與水沖擊接觸面積增大,瞬間沖擊載荷的增加,加上運動過程中彈身持續受力不均勻,彈身產生的彎曲變形進一步超過彈體結構強度,使彈體發生碎裂。彈頭的傾斜和彈身與空泡壁的接觸使得空化器作用被減弱,空化效果變差,空泡內充滿霧化液滴,給彈體運動穩定增添更多干擾因素。
由于空泡包裹下無法準確測得射彈質心位移,故采用彈頭前端在x軸和z軸方向上位移來表征射彈在俯視平面內的縱向和側向運動軌跡,即實際彈道軌跡在水平面(Oxz平面)上的投影,如圖7所示,射彈運動方向為自右到左,星號表示入水點位置。由圖7可以看出4種工況下,4個入水點在z軸方向上距離最大相差0.05 m,占水池寬的2.1%,在x軸方向上距離最大相差0.28 m,占水池長的0.8%,可見發射過程雖受膛口擾動影響,射彈仍能保證較高精度的入水點。通過對比出膛口與入水時的彈道軌跡,可知入水前彈體運動軌跡z軸方向上最大偏轉的工況為β=15.1°,其值為0.02 m,占水池寬的0.8%,在可接受的誤差范圍內,表明在膛內擾動的影響下,雖然射彈飛出槍口出現初始側滑角,但其在空中階段的運動仍較為穩定。

圖7 不同側滑角下射彈彈頭在俯視平面內的運動軌跡Fig.7 Experimental motion tracks of projectile nose at different sideslip angles in top view
4種工況對比可知:入水后,β=2.4°的工況下彈道偏轉最小,幾乎為直線,整個過程保持著較好的穩定性;而隨著入水β的增加,另外3種工況下的彈體運動軌跡在z軸方向的偏轉范圍和曲率均隨之增大,表明入水β在一定范圍內(約小于2.4°)對射彈斜入水過程的穩定性影響較小,β超過臨界值時,彈體入水后彈道就會發生偏轉甚至結構損壞,而彈道偏轉的嚴重程度由入水β的大小決定。
綜上所述,射彈以8°入水角高速斜入水時,彈頭圓錐段斜面與水面的沖擊提供了順時針力矩誘使空泡內彈尾的向下傾斜。β主要影響彈體入水瞬間和入水后的運動,對空中運動的影響不大。射彈在小側滑角入水時仍能出現透明和對稱性較好的空泡并在水下運動時保持彈道穩定。β超過臨界值時,則易造成空化效果減弱,空泡內出現大量霧滴,入水后彈道軌跡發生偏轉彎曲。β進一步增大甚至會威脅彈體結構的完整性,入水過程的不穩定性也越嚴重。
2.2 不同工況下入水噴濺變化特性
根據試驗中彈體入水時β的不同來對比分析入水沖擊引起的噴濺變化過程。圖8(a)~圖8(d)分別為4種不同工況入水噴濺在俯視平面(Oxz平面)演化過程,為便于比較分析,噴濺輪廓坐標均以各工況下的入水點為參考原點。圖8中定義L和W分別為同一時間點噴濺在Oxz平面內輪廓的最大長度和最大寬度。
分析4種工況下噴濺演化過程可知,射彈以8°角高速入水沖擊引起的噴濺可分為前后兩部分,如圖8所示。前部分噴濺由彈頭空化器面沖擊水面形成,有向彈道前方和左右側方運動的趨勢;后部分噴濺則是因入水角較小,由彈頭圓錐段斜面與水面拍擊形成,有向彈道后方和左右側方運動的趨勢。將各時間點前后兩部分噴濺分界點的坐標連線(圖8中黑色粗虛線),發現分界點運動軌跡在β=2.4°時近似為2條共端點的射線,錐角指向彈道后方。隨著β增加,分界點連線扭曲度增加,但整體彎曲方向仍指向彈道后方。

圖8 不同側滑角俯視平面下入水噴濺變化過程Fig.8 Development of splash at different sideslip angles in top view
前半部分噴濺在演化過程中,β=2.4°時對稱面近似為過入水點的Oyz平面。隨著β增加,噴濺對稱面會出現偏轉,偏轉方向與β方向一致,噴濺左右形狀也會有所偏差,但總體來看左右對稱性較好。后半部分噴濺隨射彈浸水深度增加出現明顯左右不對稱的現象,主要是彈體側滑角的存在使入水沖擊時左右水面與彈身面接觸面積不一致,靠彈身傾斜的一方(圖5中為彈肩左側)流體質點獲得更多的動能,故后半部分彈尾傾斜方向的噴濺運動速度較高,范圍較大,且后半部分噴濺的不對稱性隨β增加愈加明顯。這也表明了入水側滑角對彈肩兩側撞擊水面引起的后半部分噴濺的左右對稱性影響較大,對彈頭空化器沖擊水面形成的前半部分噴濺的左右對稱性影響較小。可以推論當彈體以0°側滑角斜入水時,水面上會形成左右對稱性更好的噴濺。
圖9為不同β下噴濺輪廓在Oxz平面內最大長度和寬度隨時間變化圖。對比可知:噴濺最大長度和寬度在4種工況下隨時間變化趨勢基本一致,長度在入水前期增長較快,后期趨于平緩;寬度變化則無明顯前后的區別,整體緩慢增長,增速逐漸減小。β=2.4°時噴濺長度在后期最大,寬度最小。結合2.1節試驗圖5和圖6可知,β增大致使射彈入水噴濺由較理想的對稱發展過程轉為非對稱發展過程,噴濺最大長度急劇變小后在非對稱發展過程中隨著β繼續增大又逐步升高,而最大寬度急劇增大后在非對稱發展過程中受β變化的影響較小。

圖9 不同側滑角下入水噴濺輪廓俯視平面內尺寸變化Fig.9 Overall dimension of splash at different sideslip angles in top view
2.3 不同工況下水下壓力波變化特性
彈體高速入水過程中,彈身與自由液面的拍擊、超空泡的形成和潰滅等均會引起周圍水域的激烈波動,并誘導產生水下壓力波。此類壓力波強度比普通水下聲波高,瞬時沖量大,但其傳播形式與普通水下聲波相同。與水下爆炸產生的沖擊波相比,該壓力波波強和沖量均有所減弱,可以認為是介于二者之間的一種高強度水下聲波,研究其變化規律對提高水下航行器穩定性和隱身性能均有重要意義。試驗中采用沿彈道軌跡左側等距成對布置測壓點的方法,測量射彈斜入水沖擊瞬間水下壓力波動,由于B組傳感器靠近墻壁,壓力信號存在較多干擾,本文僅就A組壓力信號來分析彈體不同β下入水沖擊引起的水下壓力變化規律。
圖10為4種工況下A1傳感器測得的壓力波信號,壓力幅值p自射彈入水后均出現明顯陡增后緩慢下降的過程,后期信號波動劇烈。整個過程壓力信號變化特征一致且信號峰值均出現在2.5 ms附近,可以判斷該峰值表現的是入水沖擊產生的初始水下壓力波強度。壓力峰值隨β增大而顯著增加,試驗中隨著β增大,入水沖擊時射彈與液面接觸面積增大,瞬時傳遞的能量增多,故沖擊形成的壓力波強度也顯著增強。

圖10 不同入水側滑角入水沖擊瞬間A1測壓點水下壓力波動信號Fig.10 Underwater pressure signals monitored by the transducer A1 after the water-entry impact at different sideslip angles
圖11為彈體不同入水β入水沖擊引起的水下A1、A2、A3、A4測壓點壓力波動信號。沿著彈道方向水下壓力總體變化趨勢是:在射彈入水瞬間壓力先陡增后幅值緩慢下降,后期處于高頻脈動過程,壓力幅值變化范圍較大。根據壓力信號變化特征可將整個變化過程分成2個階段:一是入水初期初始壓力波動階段Ⅰ,發生在入水瞬間(0~10 ms),波形較為規則,有明顯的壓力先陡增后緩慢下降的過程,正壓幅值較高,負壓幅值較小;二是后期(t>10 ms)壓力高頻脈動階段Ⅱ,各種壓力信號會從各個方向經過不同路徑抵達測壓點,如空泡潰滅引起的壓力波、水面和池壁反射波等,致使測量幅值隨機起伏較大,存在信號時延擴散[18]現象,后期因能量逐漸消耗而消失。對比不同β壓力信號發現:隨著β的增大,壓力高頻脈動階段Ⅱ的整體幅值和脈動強度會逐漸減小,β=2.4°時,壓力脈動整體幅值最大,脈動明顯;β=15.1°時壓力脈動整體幅值最小,波動趨于平緩。

圖11 不同入水側滑角入水沖擊瞬間水下壓力波動信號Fig.11 Underwater pressure signals induced by the water-entry impact at different sideslip angles
試驗中觀測到4種工況下入水空泡尾部均在15 ms以后開始收縮潰滅,故初始壓力波動階段Ⅰ不存在空泡潰滅的干擾。觀察0~10 ms數據可知,β為2.4°和15.1°的工況下,壓力峰值的衰減過程較為一致,沿著彈道軌跡方向,4個測壓點壓力峰值逐一衰減,最靠近入水點的A1傳感器最先感受到第一個壓力波峰,隨后A2、A3、A4傳感器接收到壓力波峰,且隨著時間壓力峰值逐漸衰減,沒有出現峰值再次增大的情況,表明在初始壓力波動階段Ⅰ,壓力波在沿彈道方向傳播時反射疊加的影響較小。但相較而言,β=15.1°的工況壓力峰值較高,壓力波強度較大,衰減速度較快。對比分析2.1節中4種工況下入水試驗現象可知:β=2.4°時,入水超空泡形成較好,彈體被完整地包裹在空泡內,0~10 ms的壓力波主要由彈頭空化器與前方水域沖擊產生,二者接觸面積較小,擾動形成的壓力波也較小,且過程中彈道較穩定未出現無其他強烈的擾動源,故壓力波峰值會逐漸衰減;而β=15.1°的工況基本未形成入水超空泡,彈體出現嚴重的傾斜,沖擊時彈體速度最高且與水域接觸面積最大,整個過程可看作是彈體在水中阻力作用下速度迅速衰減的過程,故壓力波初始峰值最高,沿著彈道方向傳播逐漸衰減。
而β=7.1°和11.1°的2種工況下,初始壓力波動階段Ⅰ均出現測壓點峰值先升高后逐漸降低的過程,根據工況1和工況4該階段壓力波反射疊加的影響較小,且4種工況測壓點接收到壓力信號時間基本一致,可以認為β為7.1°和11.1°的2種工況下該階段壓力波反射疊加的影響亦較小,測壓點峰值先升高后降低表明該時間段出現強烈擾動源。如圖6(a)、圖6(b)所示,試驗中β為7.1°和11.1°的工況入水空泡形成初期,入水沖擊時彈身與水面接觸較少,擾動較小,故A1點測得初始壓力波峰值較小,與工況1測得的壓力幅值和信號接收時間基本一致。但隨著彈道的逐漸彎曲,彈體逐漸傾斜致使彈身與水域接觸面積增大,超空泡內出現大量白色霧滴致使擾動增多,試驗中2種工況的射彈均掉落在靶前池底并未上靶,可以推測隨著彈道穩定性繼續降低,彈體中途失穩滑行掉落在池底,失穩時射彈受水阻力作用速度迅速衰減,同時形成強烈的擾動源,產生新的強壓力波信號,這與工況4的壓力波形成過程較為相似。由于整個過程時間較短,新壓力波信號會覆蓋初始入水沖擊產生的逐漸衰減的壓力波信號,故測壓點A2、A3、A4會測得新一輪壓力峰值衰減過程。
3 結論
本文通過開展超空泡射彈小入水角高速斜入水試驗,研究了入水沖擊瞬間彈體姿態對噴濺形成、彈道軌跡變化和水下壓力波傳播的影響。得出以下結論:
1)射彈以8°角高速斜入水時,β對入水空泡空化效果、彈道穩定性和結構完整性有重要影響。小β下,射彈高速入水能形成較光滑透明的入水空泡和穩定的入水彈道,較大的β易造成空泡內嚴重霧化、彈道軌跡偏轉和彈體損壞等現象,嚴重程度隨β增大而增大。
2)射彈以8°角高速斜入水時,小β下彈頭空化器及圓錐段斜面與水面的沖擊使得入水噴濺在俯視下呈左右近似對稱的“蝶”狀,β對前半部分噴濺的左右對稱性影響較小,對后半部分的噴濺對稱性和范圍影響較大。前半部分噴濺的對稱軸隨著β增大會出現相應偏轉。
3)射彈入水過程中水下壓力波變化過程可分成初始壓力波動階段和各壓力波疊加的壓力高頻脈動階段。初始壓力波動階段因β增加后入水狀態的不同呈現不同的變化特征,高頻脈動階段壓力的整體幅值和脈動強度隨β增大會逐漸減小。
