蛙人探測聲吶系統發展綜述
2020-03-06 09:43:50黃穎淞葛輝良王付印
水下無人系統學報 2020年1期
黃穎淞, 葛輝良, 王付印, 謝 勇
蛙人探測聲吶系統發展綜述
黃穎淞1, 葛輝良1, 王付印2, 謝 勇1
(1. 中國船舶重工集團公司 第715研究所, 浙江 杭州, 310023; 2. 國防科技大學 光電科學與工程學院, 湖南 長沙, 410073)
蛙人由于目標小、破壞性大, 可擔負常規力量無法完成的任務, 已成為港口與近岸水域的嚴重威脅之一。水下蛙人探測是非傳統安全保障領域的一個重要研究方向,對于港口、大型艦船、濱海娛樂場所、海上石油鉆井平臺等重點水域的安保和防御具有重要意義。文中首先論述蛙人的主要特征, 指出了蛙人探測的難點問題, 同時闡述蛙人探測聲吶(DDS)的相關原理。隨后以英國、以色列、加拿大等國和國內具有代表性的產品為例, 詳細介紹當前國內外DDS系統的發展狀況。最后總結我國在DDS方面取得的成果, 指出國內DDS技術與國外的差距, 展望DDS的技術發展趨勢, 為促進我國DDS的發展提供借鑒與參考。
蛙人探測聲吶; 安保; 防御; 發展趨勢
0 引言
冷戰結束后, 各主要西方國家對海上的關注逐步由深海轉向淺海乃至港口附近的水域。而近年來, 以蛙人或小型運載器的形式針對港口、船只、水上設備以及其他設施的襲擊時有發生。由于目標小, 破壞性大, 可擔負水下偵察、爆破、暗殺、救援、破障、目標指引等常規力量無法完成的任務, 蛙人成為港口與近岸水域的嚴重威脅[1]。
當今, 許多國家都非常重視港口及近岸水域防御的相關建設, 西方國家投入了大量的人力和物力對相關核心技術進行研發, 并在重要港口、航道等位置都構建了水域安防系統, 現已初見成效[2-3]。我國海洋面積遼闊, 隨著海上及海岸設施的建設, 港口、船只等水上設施的安全保障也愈加受到重視。
水下小目標探測在一定程度上能夠有效保證港口等水上設施的安全。水下蛙人探測是非傳統安全保障領域中一個新的研究方向, 也是當前國內外小目標探測發展的重點和難點, 對于港口、船只和海上設備等重點保護水域安保和防御有重要意義。
1 蛙人主要特征
1.1 水下聲輻射特征
與其他水下目標不同, 蛙人以生物為載體, 需要在水下呼吸, 除了具有一般小目標的聲散射特性外, 還具有一定的聲輻射特性。
蛙人聲輻射的主要來源是人體的肺部組織。當蛙人呼吸時, 呼吸氣體在呼吸器內的流動會引起一系列振動和波動, 從而發生聲輻射。因此, 可以通過對蛙人的呼吸聲信號和噪聲信號進行特征提取, 以區分不同水下目標的類型[4-5]。
蛙人呼吸具有明顯的周期性特征。在每個呼吸周期中, 蛙人呼吸產生的信號具有3個連續的持續時間: 吸氣、呼吸保持和呼氣。在每個單獨的持續時間, 蛙人的信號由不同的機制產生。在水下吸氣期間, 蛙人攜帶的壓力調節閥會產生信號; 在呼吸保持期間, 將會以背景噪聲為主; 在水下呼氣期間, 則會由呼出的氣泡產生信號。通常情況下, 蛙人呼吸的時間周期大致為5~12 s, 具體取決于蛙人的游泳技能和訓練水平。專業潛水員的標準呼吸技術是: 用3~4 s的時間吸氣、用4~5 s的時間呼氣[6-7]。
1.2 水下目標強度特征
目標強度是指水下目標如潛艇、蛙人、水雷和魚類等反射的回波強度。
蛙人、水雷和魚類等物體由于自身體積較小, 被定義為小目標。對于小目標而言, 目標強度不僅低, 而且能否被發現主要依賴于聲吶系統的波長。但是, 對于大部分主動聲吶而言, 由于其他方面的需求使得其波長在通常情況下會小于目標的最小尺寸, 從而避免了小目標帶來的問題[8]。
影響蛙人目標強度的因素主要有呼吸器、潛水服和人體本身, 三者之中影響最大的是呼吸器。呼吸器分為開式呼吸器和閉式呼氣器, 蛙人利用的開式呼吸器會產生氣泡群, 且開式呼吸器的氣瓶比閉式呼氣器的氣瓶大。因此, 采用開式呼吸的蛙人比采用閉式呼吸的蛙人具有更大的目標強度。
蛙人體積較小, 水下等效反射半徑小于0.3 m。同時, 蛙人在水下的行動噪聲也非常小, 目標強度較低。負重9 kg的普通蛙人水下平均行進速度大致為1 kn, 目標強度在–16~–25 dB之間; 裝備助推裝置的蛙人最高可負重90 kg, 水下推進速度為2.5~3 kn, 目標強度在–12 dB左右[9-11]。
蛙人作為一種水聲目標, 可以反射聲波, 也可以產生輻射噪聲信號, 這就為聲吶設備探測提供了基本的條件。
2 蛙人探測聲吶原理
2.1 聲吶頻譜
圖1中列舉了一些常用聲吶的頻率, 跨度為10 Hz~10 MHz。由圖1可看出, 探測目標的體積越大, 聲吶頻率越低, 反之則越高。反潛戰(anti- submarine warfare, ASW)的目標為潛艇, 其長度通常為數十米, 因此, ASW聲吶的頻率在10 kHz以下; 蛙人、水雷和常見魚類由于體積差別不大, 因此, 反水雷(mine-counter measure, MCM)聲吶、蛙人探測聲吶(diver detection sonar, DDS)和魚類聲吶的頻率也較為接近, 通常在100 kHz左右; 而醫療聲吶的頻率最高可達10 MHz以上。
從ASW主被動聲吶和蛙人探測主被動聲吶的頻率來看, 在探測目標相同的前提下, 被動聲吶所用的頻率低于主動聲吶的頻率。
2.2 DDS工作模式
按照工作原理的不同, DDS分為2種類型: 主動聲吶和被動聲吶。由于蛙人體積小、輻射波弱, 因此通常采用高頻主動聲吶探測技術進行探測。
主動式DDS工作頻帶范圍約為50~500 kHz,發射聲強級約為180~210 dB, 對蛙人的探測距離最高可達2 000 m。主要有固定和機動2種安裝方式, 前者通常放置在海底或者碼頭, 后者則以吊放的形式部署。主動換能器持續發射強脈沖信號并在一定的水平范圍內掃描, 探測返回回波, 若在某一方向上出現強回波, 則可根據返回時間和波束掃描角度確認目標的距離和方位。

圖1 聲吶頻譜圖
主動式DDS的優點是探測距離遠, 缺點是需要水下換能器長時間工作, 存在水下噪音污染, 固定安裝時需要定期清洗換能器等。
被動式DDS工作頻帶范圍約為100~300 Hz, 探測距離最大為200 m。被動式DDS雖然具有可長時間工作、維護成本低等優點; 但是, 被動式DDS探測距離近, 且僅能用于噪聲較大的目標, 例如裝有螺旋槳助推器的蛙人, 局限性較大, 因此, 被動聲吶較少用于蛙人探測。
3 國內外DDS系統主要發展概況
近幾年, 國外DDS發展迅速, 我國也已著手研究相關技術。以英國、以色列、加拿大等國和國內具有代表性的產品為例, 介紹當前國內外DDS系統的發展狀況, 以便了解當前國內外DDS的發展水平, 為促進我國的DDS發展提供參考。
3.1 英國DDS系統
3.1.1 冥府守門狗360
“冥府守門狗360”(Cerberus 360)是英國奎奈蒂克(QinetiQ)公司研制的高性能主動式DDS系統, 能自動探測、識別和跟蹤水下威脅, 其水下部分如圖2所示。
Cerberus 360的聲吶單元功能很強, 能夠在800 m范圍內對蛙人進行探測。當蛙人的速度為1~2 kn時, 這個探測距離可以為操作者提供至少25 min的處置時間。系統僅利用一個獨立聲吶單元就實現了360°的全方位覆蓋。這些聲吶單元既可以單獨使用, 懸掛在船舷兩側, 為艦船提供保護; 也可以多個聯合使用, 部署在海床上, 形成一道警戒線, 保護海港和航道的安全。若采用后者的方式進行布放, 該系統的偵察范圍最長可延伸到1 000 m之外[12]。

圖2 “冥府守門狗360”蛙人探測聲吶
通過收集足夠的有效目標回波, 該聲吶能夠在水下500 m的距離識別出人類所特有的胸腔, 分辨出水下目標是蛙人還是其他哺乳動物(如海獅和海豚), 進而減少虛警率。
QinetiQ公司還主張對港口和海港實行分層防御, 旨在防御不同種類和不同范圍的威脅。因此, Cerberus 360和該公司相關的一些技術, 例如結合光纖傳感器和高清晰度地面雷達的遠程水下被動監視陣列, 可以集成起來提供超過10 km的系統解決方案。
2004年, 美國國防部與QinetiQ公司簽訂了有關Cerberus 360的合同, 該系統在英國成功試用之后不久即交付美軍使用, 并沿用至今。
3.1.2 蛙人偵察系統
蛙人偵察系統(diver reconnaissance system, DRS)是英國QinetiQ公司研制的一種手持式DDS, 如圖3所示。這種手持式DRS能夠在避碰模式和目標定位模式下工作。系統重10 kg, 水下部分重0.5 kg, 能夠在100 m的深度工作。依靠電池提供能源, 可持續工作6.5 h。

圖3 蛙人偵察系統
DRS的探測主傳感器是一部工作頻率高達500 kHz的前視高頻電子掃描聲吶, 能夠在230 m距離上探測到強度為-25 dB的目標。DRS還具有導航功能, 其導航系統采用長基線主動聲學發射方式, 導航誤差可控制在0.5 m以內, 最大導航距離可達1 200 m。系統的聲吶探測和導航信息可以同時顯示在一個平板顯示器上, 任務完成后還可以進行過程回放, 便于分析。DRS可用于支持瀕海和兩棲作戰、海灘搜索、港口警戒、蛙人探測、內陸水系調查和考古等。
QinetiQ公司于2005年9月向英國國防部交付了首套DRS。
3.1.3 “地獄狗”DDS
“地獄狗”DDS(Cerberus Mod2)是英國Atlas Elektronik公司研制的便攜式DDS, 能夠探測水下1000 m內的目標, 堪稱反蛙人利器。其水下探頭如圖4所示。
“地獄狗”DDS是獨立成套系統, 其布放簡單, 維護便捷, 可以單獨布放, 用于區域防護, 也可以多個協同布放, 形成一個安全區域。當多個“地獄狗”DDS同時布放在一個區域時, 每個聲吶都是一個基站, 每個基站可同時跟蹤50個目標。

圖4 “地獄狗”DDS
“地獄狗”DDS由1個頻率在70~130 kHz之間可選的高分辨率大帶寬主動聲吶作為核心, 由1~3個壓電換能器陣進行360°探測, 覆蓋區域高達4.5 km2, 可探測900 m外的開式呼吸蛙人和700 m外的閉式呼吸蛙人, 且能夠跟蹤850 m外的開式呼吸蛙人和675 m外的閉式呼吸蛙人。該便攜式聲吶對威脅的反應時間是25 min, 方位精度可達到1°以內, 能精確探測到位于水下2~50 m的目標, 虛警率極低。
目前, 德國海軍已采購了數套該型聲吶, 并在護衛艦上進行了安裝。
3.1.4 “哨兵”反蛙人聲吶
“哨兵”反蛙人聲吶(Sentinel intruder detection sonar, Sentinel IDS)由英國Sonardyne公司研制, 是世界上部署最為廣泛的DDS之一, 其水下探頭如圖5所示。

圖5 “哨兵”反蛙人聲吶
自2006年推出以來, “哨兵”IDS將高可靠、遠距離蛙人探測提升到了一個新的水平。該系統體積小、質量輕、虛警率低, 一經配置即可自主運行。
系統由干端處理機和濕端聲吶探頭兩部分組成, 可通過電纜連接, 布放靈活。一個干端工作站可以同時控制、顯示和處理10個聲吶探頭, 并可避免相互干涉。系統完成布放后, 通過較少的人為干預, 就可通過探測、跟蹤和識別軟件對水中目標進行評估。
“哨兵”IDS的聲吶探頭直徑僅為30 cm, 高40 cm, 質量為35 kg。系統工作頻率為70 kHz, 帶寬為20 kHz, 方位精度為0.1°~0.5°, 最大工作深度為50 m, 對開式蛙人的最大測距為900 m, 具有聯網功能。
美國海軍和斯洛文尼亞海軍先后購置了該型號聲吶系統[13]。
3.2 以色列DDS系統
以色列的DSIT公司主要研發了3種用于水下安全的DDS系統, 包括“水盾”DDS(AquaShield DDS)、“尖盾”便攜式DDS(PointShield portable DDS)和港口監視系統(harbor surveillance system, HSS)。
3.2.1 “水盾”DDS系統
“水盾”DDS系統是一種高性能DDS系統, 其水下單元如圖6所示。其能夠為高價值的設施提供永久性的安全保障, 如海軍基地、港口、石油和天然氣平臺、海上平臺、水下管道和電纜、核電設施和運河等。

圖6 “水盾”DDS
“水盾”DDS支持各種類型水下目標的長距離探測, 包括使用呼吸器、水肺的蛙人和無人水下航行器(unmanned underwater vehicle, UUV)。“水盾”DDS采用模塊化設計架構, 可在部署和安裝方面實現最大的靈活性。該系統提供120°、240°和360°共3種扇區覆蓋配置, 所有配置均涵蓋整個相關柱面。開式呼吸蛙人探測距離為1 000 m; 閉式呼吸蛙人探測距離為700 m。
系統支持從探測、跟蹤到識別和警報的全自動操作, 能夠同時對1 000多個聲吶觸點進行實時和連續跟蹤, 從而降低了對人工輔助的要求。先進的信號處理算法確保了高檢測概率(proba- bility of detection, PD)和低虛警率(false alarm rate, FAR)的理想兼顧[14]。
自2007年面世以來, “水盾”DDS成為DDS系統領域的暢銷者。
在“水盾”DDS的基礎上, 2014年6月, DSIT推出了“水盾”DDS擴展系統(AquaShield extended range, AquaShield ER)。AquaShield ER提供了前所未有的探測距離, 蛙人運載器探測距離達3500 m, 開式蛙人探測距離達1 800 m, 閉式蛙人探測距離達1 200 m。
3.2.2 “尖盾”便攜式DDS系統
“尖盾”便攜式DDS系統主要用于保護停泊在港口的船舶免受水下威脅, 其水下單元如圖7所示。

圖7 “尖盾”便攜式DDS
“尖盾”便攜式DDS系統也適用于覆蓋在有限區域內的固定安裝。“尖盾”便攜式DDS系統具有質量輕、結構緊湊、便于攜帶、可快速部署和探測等優點。該系統堅固耐用, 能夠在惡劣水域進行長期連續的水下作業, 因此也是永久性安裝的理想選擇。
與“水盾”類似, “尖盾”便攜式DDS系統同樣支持全自動操作, 支持探測多種類型的水下威脅, 并且檢測概率非常高、虛警率低。
系統提供360°全方位的覆蓋, 完全環繞被保護物體, 覆蓋整個相關柱面。對開式呼吸蛙人, 探測距離為700 m; 對閉式呼吸蛙人, 探測距離為500 m。
2018年1月8日, 印度海軍訂購了78個“尖盾”便攜式DDS裝置[15]。
3.2.3 HSS
為了防止入侵者破壞、非法闖入或恐怖襲擊, 以及滿足全球對可靠港口保護和水下港口安全的迫切需求, DSIT公司開發了一套全面的港口監控系統(HSS), 能夠可靠探測、跟蹤和警告蛙人、潛水器和小型水面船只等入侵者。
HSS通過集成DDS、監視雷達、電光器件創建統一的指控中心。其由高頻DDS系統、晝夜均可工作的電光觀察系統、高分辨率雷達、指揮與控制系統以及方向單位組成, 可以在淺水或深水、白天或夜晚以及所有天氣條件下運行。
3.3 加拿大DDS系統
CSDS-85 型海港安全監測聲吶系統(water- side security sonar, WSS) 是加拿大C-Tech 公司的第5代高性能海港監測聲吶, 其水下部分如圖8所示。其工作頻率為80 kHz, 帶寬為3 kHz, 最大探測距離能達到2 000 m。既能夠360°水域全方位監視, 也能夠選擇扇面監視范圍; 既可以單獨在港口展開監視, 也可以多臺聯網工作, 形成較大的監控區域。CSDS-85主要的功能為: 對蛙人、蛙人輸送艇(swimmer delivery vehicle, SDV)、自主水下航行器(autonomous undersea vehicles, AUV)和部分小型潛艇進行短距離探測。其部署方式有多種選項, 包括底部安裝、船只安裝, 或使用吊車、起重機進行側面部署。
3.4 土耳其DDS系統
2012年, 土耳其研發了一種新型DDS。該聲吶是一種高頻主動聲吶, 能夠探測高達1 200 m范圍的閉式潛水系統。該聲吶主要由水下單元和水上單元2個部分組成, 即濕端和干端。水下單元由擴展模塊和接收模塊組成, 水上單元位于系統控制室內, 由電子柜和操控臺構成。系統主要的構成如圖9所示, 主要參數如表1所示[16]。

圖8 CSDS-85型海港安全監測聲吶系統

圖9 土耳其DDS系統設計

表1 土耳其DDS系統參數
研究人員在不同季節條件下對該聲吶進行了為期1年的現場試驗。在這些試驗中, 通過溫度對聲速曲線的影響, 觀察探測距離的變化。為避免一些與試驗無關的環境噪聲影響測試結果的準確性, 研究人員還開發了一種自適應降低環境噪聲的算法, 并在該系統上成功運行[17]。
該系統在現場試驗中能夠通過聲光報警對水下目標做出識別和警告, 從而探測出水下威脅。
3.5 國內研究發展概況
相比于歐美等發達國家而言, 我國在蛙人探測方面起步較晚, 但是也取得了一定的成果, 并將這些成果投入到了實際的運用中。
3.5.1 中科院聲學所DDS
國內首先自主開展DDS研制的是中國科學院聲學研究所。中科院聲學所突破國外技術封鎖, 基于其成熟的高頻聲吶研制技術, 成功研制了全部自主知識產權的DDS。該DDS系統的中心頻率為100 kHz, 帶寬為10 kHz, 不僅具有連續波(continuous wave, CW)脈沖信號體制, 還具有線性調頻(linear frequency modulation, LFM)、偽隨機編碼以及雙曲調頻等幾種信號體制, 是當時國內唯一的數字多波束DDS。該系統在2008年的北京奧運會青島帆船比賽(青島奧帆賽)和上海世博會等水下安保中得到了成功應用。圖10為上海世博會的水下安防系統組成示意圖[18]。

圖10 上海世博會應用的水下安防系統組成示意圖
同時, 中科院聲學所還結合廈門金磚五國會議、上海世博會、廣州亞運會等大型活動及三峽大壩等重要設施的水下安防需求, 開展了多部DDS的系統集成, 并集成了水下喊話器等處置裝備, 也開始了引接雷達、視頻等水面探測信息降低水下目標探測虛警率的嘗試。
3.5.2 TRONKA聲吶系統
中國和烏克蘭早期共同研制了TRONKA聲吶系統, 但是該系統僅在烏克蘭獲得了專利[19]。
TRONKA聲吶系統主要由傳感器、聲速剖面儀、絞車、電源和顯示器等部分組成, 如圖11所示。傳感器采用的是壓電磁感應器, 聲速剖面儀用于測量系統所在位置的聲速, 并根據聲速值由絞車調節系統位置, 以便得到更好的測量效果。傳感器接收到目標的回波后, 實時顯示聲吶系統捕獲的圖像, 并給出目標的方位、距離、運動速度及系統所在點的聲速和聲線圖等信息, 同時通過信號處理對目標進行判斷, 最終檢測出目標類別。
TRONKA聲吶系統采用高頻探測技術, 工作頻率為60 kHz, 監測水域縱深7~100 m, 可探測以聲吶系統為中心半徑500 m區域內的目標。
該系統探測的方位精度為2°, 距離精度為1.5%, 傳感器可在水下20 m深的位置工作, 測量聲速的深度可達100 m, 但探測的目標要求半徑大于0.3 m, 運動速度為1.5~6 kn。
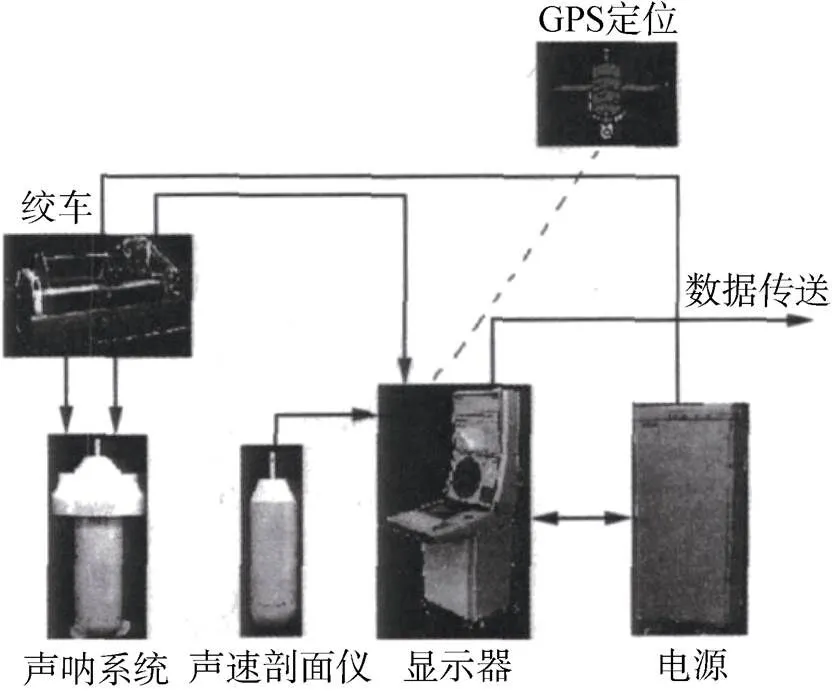
圖11 TRONKA聲吶系統組成
TRONKA聲吶系統能夠探測潛艇、UUV和蛙人等水下活動目標和潛伏的非活動目標, 以及海底爆炸物等固定目標, 并實時將監測結果送入數據處理裝置, 經數據處理、目標識別和判斷, 把信息傳送給岸站, 即安全控制中心, 從而形成水下安全防護監測系統, 以防御蛙人襲擊, 保護港口、潛艇和艦船等的安全。2008年, 該系統在青島奧帆賽的浮山灣賽場水下安保中得到成功應用[20-21]。
3.5.3 國內其他DDS系統
2012年, 上海船舶運輸科學研究所與中科院聲學所2家單位聯合研發生產了當時國內最新型的2010型DDS。該聲吶系統覆蓋范圍為180°, 工作頻率為70 kHz, 采用CW和LFM 2種信號機制。帶寬為4~20 kHz不等, 能很好地調節分辨率與作用距離的關系。為了更好地匹配水下復雜地形, 系統還能調節垂直相控發射, 最大調節為±15°。在復雜多變混濁水域中的探測距離大于200 m, 在清澈水域中的探測距離達到500 m以上[22]。此外, 中船集團726所和715所也先后成功研制了DDS產品。
4 結束語
文中綜述了DDS系統的國內外發展現狀。目前, 國外在DDS系統方面已經取得了較大的成果。近年來, 我國也越來越重視水下安防技術的研究, 并在相關產品方面取得了一些成果, 有些成果已經應用。例如, 國內自主研制的多型蛙人聲吶系統, 在探測距離上已接近國際先進水平; 高頻高分辨率成像聲吶也已有多型樣機; 水下運動小目標的被動探測技術也已研究, 并開展了海上試驗驗證。
在DDS技術方面, 雖然我國在硬件層面上已經基本攻克, 但在其他方面還有一些難點問題需要解決, 主要體現在:
1) 在后端系統集成方面, 存在虛警率高, 無法有效區別蛙人和大型海洋生物等問題;
2) 在工程實踐方面, 面對近岸港口附近生物附著嚴重, 如何突破是一個需要解決的問題;
3) 大多數港口水質較為混濁, 加之船只駛過產生的大量氣泡會導致聲吶系統對目標進行誤判, 因此需要減小水文條件等其他因素的干擾;
4) 如何進一步提高探測距離, 通過系統優化布局實現最佳探測效率仍有待進一步研究。
上述問題的攻克, 將不斷提高港口、航道等水上設施的安全, 有效降低恐怖襲擊等的威脅。
我國有漫長的海岸線、眾多的港口和遼闊的海疆, 沿海經濟帶是我國經濟發展最為活躍的區域, 是國家高價值戰略資產的重要集聚場所, 同時也是敵對勢力重點針對的場所。因此, 如何保衛港口、領海和重點水域的安全, 防止水下蛙人的襲擾破壞, 是我國水聲技術領域面臨的一項重要課題, 也將是未來技術發展的重要方向。
[1] 李漢清, 戴修亮. 美國海軍正在發展的水下探測系統[J].情報指揮控制系統與仿真技術, 2004, 26(4): 37-38.Li Han-qing, Dai Xiu-liang. Underwater Detecting System of US Navy[J]. Information Command Control System & Simulation Technology, 2004, 26(4): 37-38.
[2] 許鋼燦, 倪東波, 郭建.反蛙人聲吶系統發展綜述[J].中國安全防范技術與應用, 2018(5): 13-18.
[3] 徐瑜, 倪小清, 夏紅梅, 等.蛙人探測聲吶發展現狀及關鍵技術[J].艦船電子工程, 2017, 37(3): 1-3, 126.Xu Yu, Ni Xiao-qing, Xia Hong-mei, et al. Current Status of Diver Detection Sonar and Key Technologies[J]. Ship Electronic Engineering, 2017, 37(3): 1-3, 126.
[4] 朱知萌.水下蛙人呼吸聲信號特征提取研究[D].哈爾濱: 哈爾濱工程大學, 2016.
[5] 姜衛, 范軍, 胡碰.聲吶頻段內動物體肺部組織目標強度的水下測量[J].聲學技術, 2007, 26(5): 45-47.Jiang Wei, Fan Jun, Hu Peng. The Underwater Measurements of the Targets Strengths of Animal Lung Tissue at the Sonar Frequency[J]. Technical Acoustics, 2007, 26(5): 45-47.
[6] Sharma N S, Yakubovskiy A M, Zimmerman M J. SCUBA Diver Detection and Classification in Active and Passive Sonars-A Unified Approach[C]//IEEE International Conference on Technologies for Homeland Security. Waltham: IEEE, 2014: 189-194.
[7] Chen X, Wang R, Tureli U. Passive Acoustic Detection of Divers under Strong Interference[C]//Oceans 2006. Boston, United States: IEEE CS, 2006, 1-6.
[8] Waite A D. Sonar for Practising Engineers[M]. 3rdEdition. English: John Wiley & Sons, Inc, 2002.
[9] 張波, 劉文章.蛙人回波建模與實驗研究[J].應用聲學, 2010, 29(4): 313-320.Zhang Bo, Liu Wen-Zhang. Modeling and Experimental Study of Echo from a Diver[J]. Applied Acoustics, 2010, 29(4): 313-320.
[10] 邢更力, 徐常星, 范殿梁, 等.近岸水域反恐防范技術發展現狀及關鍵技術[J].中國安全防范技術與應用, 2018(5): 8-12.
[11] 張彥敏, 佟盛.反蛙人技術在港口監控中的戰術應用[J].艦船科學技術, 2008, 30(6): 168-171.Zhang Yan-min, Tong Sheng. Tactics Appliance of Anti-diver Technique in Harbour Defense[J]. Ship Science and Technology, 2008, 30(6): 168-171.
[12] Crawford A M, Vance C D. Observations from Demonstrations of Several Commercial Diver Detection Sonar Systems[C]//Oceans 2007, Vancouver, BC: IEEE, 2007: 1-3.
[13] The Hydrographic Society UK. Slovenian Navy Chooses Sonardyne Sentinel Diver Detection Sonar[EB/OL]. (2019-03-26)[2019-09-27].https://www.ths.org.uk/news_details.asp?v0=208.
[14] Felber F. Extended Intruder Detection to Counter Advanced Underwater Threats in Ports and Harbors[C]// 2018 IEEE International Symposium on Technologies for Homeland Security(HST). Woburn, MA, USA: IEEE, 2018.
[15] DSIT Solutions Ltd. DSIT Receives an Order for 78 PointShield? Portable Diver Detection Sonars[EB/OL]. (2018-05-30)[2019-08-21]. https://dsit.co.il/dsit-receives- order-78-pointshield-portable-diver-detection-sonars/.
[16] Ba?aran Y H, ?ktem M H, Atabek Y, et al. Diver Detection Sonar[C]//2012 20th Signal Processing and Ications Applications Conference(S2165-0608). Mugla: IEEE, 2012.
[17] Ba?aran Y H. Eastern Mediterranean (Levantine Sea) Acoustic Properties[D]. Istanbul: Istanbul University, 1993.
[18] 蔣立軍, 楊娟, 許楓.蛙人探測聲納技術研究進展[J].科學通報, 2009, 54(3): 269-272.Jiang Li-jun, Yang Juan, Xu Feng. Technological Progress of Diver Detection Sonar[J]. Chinese Science Bulletin, 2009, 54(3): 269-272.
[19] 王萍.水下小目標主被動聲學特性及探測方法研究[D].哈爾濱: 哈爾濱工程大學, 2009.
[20] 張穎, 孫繼昌, 張穎穎, 等.TRONKA聲納系統在蛙人探測中的應用研究[J].海洋技術, 2008, 27(2): 92-95.Zhang Ying, Sun Ji-chang, Zhang Ying-ying, et al. Application of TRONKA Sonar System in Diver Detection[J]. Ocean Technology, 2008, 27(2): 92-95.
[21] 張穎, 孫繼昌, 郭威.蛙人探測聲納系統在奧帆賽中的應用[J].氣象水文海洋儀器, 2008(3): 47-50.Zhang Ying, Sun Ji-chang, Guo Wei. Application of Research of TRONKA Sonar System in Frogmen Detection[J]. Meteorological, Hydrological and Marine Instruments, 2008(3): 47-50.
[22] 尹凱華.水下衛士——蛙人探測聲納[J].上海船舶運輸科學研究所學報, 2012, 35(z1): 31-35.Yin Kai-hua. The Guard under Water——Diver Detecting Sonar[J]. Journal of Shanghai Ship and Shipping Research Institute, 2012, 35(z1): 31-35.
Review on the Development of Diver Detection Sonar System
HUANG Ying-song1, GE Hui-liang1, WANG Fu-yin2, XIE Yong1
(1. The 715 Research Institute, China Shipbuilding Industry Corporation, Hangzhou 310023, China; 2. College of Optoelectronic Science and Engineering, National University of Defense Technology, Changsha 410073, China)
Diver attack has become one of the serious threats against harbors and near-shore waters. Underwater diver detection is an important new research direction in the field of non-traditional security. Corresponding research is of great significance for the security and defense of key waters such as harbors, large vessels, coastal entertainment sites and offshore oil rigs. This paper first discusses the main characteristics of the diver, points out the difficult problems in diver detection, and elaborates the relevant principles of the diver detection sonar(DDS). Then, it takes the representative products made in Britain, Israel, Canada, China and other countries as examples to introduce the current development status of DDS systems in detail. Finally, it summarizes the research results of the DDS in China, points out the gap of DDS technology between China and foreign countries, and forecasts the development trend of the DDS technology.
diver detection sonar(DDS); security; defense; development trend
TJ67; TB566
R
2096-3920(2020)01-0001-09
10.11993/j.issn.2096-3920.2020.01.001
黃穎淞, 葛輝良, 王付印, 等. 蛙人探測聲吶系統發展綜述[J]. 水下無人系統學報, 2020, 28(1): 1-9.
2019-09-27;
2019-12-18.
黃穎淞(1994-), 男, 在讀碩士, 研究方向為水聲信號處理與硬件技術.
(責任編輯: 許 妍)
猜你喜歡
金橋(2022年10期)2022-10-11 03:29:46
金橋(2022年10期)2022-10-11 03:29:22
工業設計(2022年8期)2022-09-09 07:43:20
機電設備(2022年2期)2022-06-15 03:20:38
軍民兩用技術與產品(2021年10期)2021-03-16 06:05:30
北京測繪(2020年12期)2020-12-29 01:33:58
裝備制造技術(2019年12期)2019-12-25 03:06:46
當代工人(2019年20期)2019-12-13 08:26:11
中國洗滌用品工業(2019年4期)2019-05-11 09:27:34
水上消防(2018年4期)2018-09-18 01:49:38
