基于三自由度動態內模解耦的PMSM弱磁控制
2020-03-06 09:46:04尤錢亮魏海峰田會峰
水下無人系統學報 2020年1期
關鍵詞:控制策略
尤錢亮, 魏海峰, 常 徐, 田會峰
基于三自由度動態內模解耦的PMSM弱磁控制
尤錢亮1,2, 魏海峰1,2, 常 徐1,2, 田會峰1,2
(1. 江蘇科技大學電子信息學院, 江蘇 鎮江, 212003; 2. 蘇州東大金點物聯科技有限公司, 江蘇 張家港, 215000)
針對水下航行器推進系統中永磁同步電機(PMSM)在弱磁區電動工況下動態性能不理想的問題, 依據PMSM弱磁理論, 研究了交直軸電流調節器對弱磁控制動態性能的影響, 提出基于三自由度動態內模解耦的PMSM弱磁控制策略。考慮到傳統內模解耦無法同時兼顧解耦效果、響應速度及穩態誤差,引入電流調節因子, 對解耦控制器進行改進。在此基礎上,針對輸出轉矩發生階躍時交軸電流調節方向與系統期望方向相反的問題, 在電流調節因子中加入交軸電流信息, 結合模糊控制器, 實時對電流調節因子進行優化。仿真和試驗結果表明, 該策略綜合解決了弱磁區電動工況下交軸電流調節器調節不利和電流耦合嚴重的問題, 改善了PMSM的動態性能, 同時具有抗飽和、電流解耦及弱磁控制的三重功能。
水下航行器推進系統; 永磁同步電機; 弱磁控制; 動態性能; 三自由度動態內模解耦; 抗飽和
0 引言
推進電機是水下航行器的重要組成部分, 然而水下航行器空間有限、運行情況復雜, 選用空間占用小、響應速度快、節能高效的推進電機對水下航行器具有重要意義[1]。永磁同步電機(per- manent magnet synchronous motor, PMSM)具有體積小、效率高、轉矩輸出能力好等優點, 滿足了水下航行器推進電機的要求[2]。由于采用永磁體勵磁, 無法通過勵磁繞組調節勵磁磁場, PMSM必須采用弱磁控制技術以滿足寬轉速范圍的調速需求。在不增加電壓源逆變器(voltage source in- verter, VSI)容量的情況下, 弱磁控制可以幫助實現PMSM在高速情況下的恒功率輸出, 并拓寬其調速范圍。因此, 有必要研究高性能的PMSM弱磁控制策略。
自20世紀80年代中期, 學者們一直致力于弱磁控制策略的研究, 以期在保證電機工作效率的基礎上, 不斷擴大其調速范圍, 提高其調速性能[3-4]。文獻[5]提出一種修正電流設定值的弱磁控制策略, 通過梯度下降法計算出電流調節器輸出電壓的遞減方向信息, 根據電壓設定值與電流調節器輸出電壓的差值和電壓、轉矩變化量的方向信息設定電流修正值, 具有良好的動態性能, 但其計算量大, 參數魯棒性差; 文獻[6]和[7]用前饋磁鏈減去反饋磁鏈對系統進行弱磁控制, 其中前饋磁鏈通過查表獲得, 反饋磁鏈由過調制模塊輸入電壓和輸出電壓的差值計算而得, 一定程度上優化了系統動態性能, 但電壓偏差轉換為反饋磁鏈的增益確定及表格數據均需通過大量試驗獲得; 文獻[8]和[9]利用VSI輸出電壓的極限值和直()軸電壓計算得到最佳交軸電壓指令, 使得電機工作點指令始終位于恒轉矩曲線和當前轉速對應的電壓極限橢圓的交點, 該方法提高了系統電壓利用率, 但穩態性能不佳; 文獻[10]和[11]在單電流弱磁控制的基礎上, 以使電機在輸出轉矩不變的情況下工作電流達到最小值為目的, 利用梯度下降法在線修正交軸電壓給定值, 系統工作效率明顯提升, 但參數魯棒性不強; 文獻[12]在基于電壓反饋的弱磁控制策略基礎上, 將VSI所能輸出的最大電壓和交直()軸電流調節器輸出的電壓指令作差, 利用電壓調節器對其進行調節, 從而獲得直軸電流期望值, 系統穩態性能和魯棒性得到提升, 但瞬態響應性能不理想。
弱磁工況下, PMSM的動態和穩態性能取決于交直軸電流跟隨指令的程度。當VSI和電流調節器的輸出存有裕量時, 系統電流可較好地跟隨指令, 當兩者出現飽和時, 實際電流與指令間會出現較大誤差。因此, 只有抑制VSI和電流調節器的飽和, 提高電流跟隨性能, 才能提高PMSM的弱磁性能。
文中分析了PMSM在弱磁區電動工況下動態性能不佳的原因, 以基于電壓反饋的弱磁控制策略為基礎, 提出基于三自由度動態內模解耦的PMSM弱磁控制策略。針對傳統內模解耦無法兼顧解耦效果和電流調節器性能的問題, 在傳統內模解耦的基礎上引入2個電流調節因子; 考慮到弱磁區電動工況下PMSM輸出轉矩階躍時交()軸電流調節不利的問題, 在電流調節因子中加入交軸電流信息, 從源頭削弱其對系統的影響; 結合模糊控制器, 利用VSI實際輸出電壓和電壓指令的誤差, 實時優化電流調節因子; 最后通過仿真試驗, 對該策略及基于電壓反饋的弱磁控制策略進行對比分析。
1 PMSM弱磁控制理論
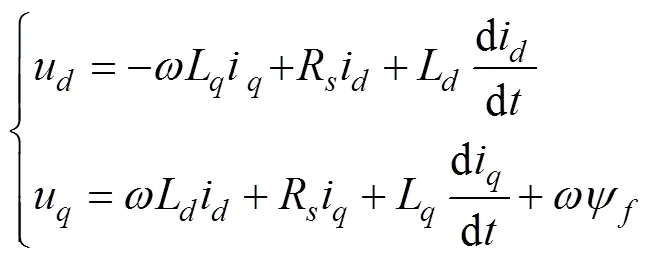
PMSM以VSI供電, 其主電路拓撲如圖1所示。構建PMSM數學模型[13], 其交直軸電壓方程為
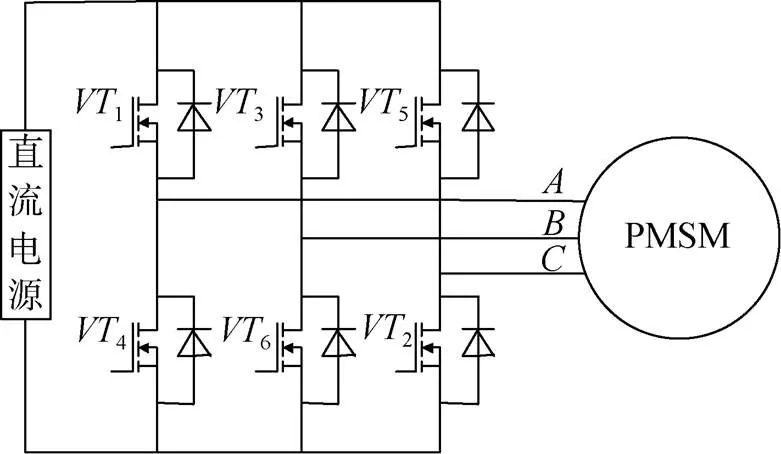
圖1 永磁同步電機分析模型
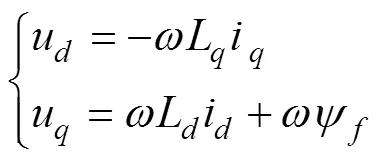
忽略定子電阻, 其穩態電壓方程為
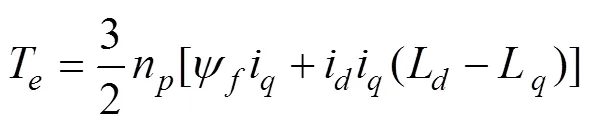
輸出的電磁轉矩為

PMSM的運行會受到VSI輸出能力的限制, 主要分為以下2個方面。

把式(2)代入式(4), 可將對電壓的限制轉化為對電流的限制, 即

在實際工程中, 常用如圖3所示的基于電壓反饋的弱磁控制策略來實現i的負向增加。其中, 為防止電壓限制橢圓和電流限制圓無交點引起電流失控, 對i進行了限幅[14]。
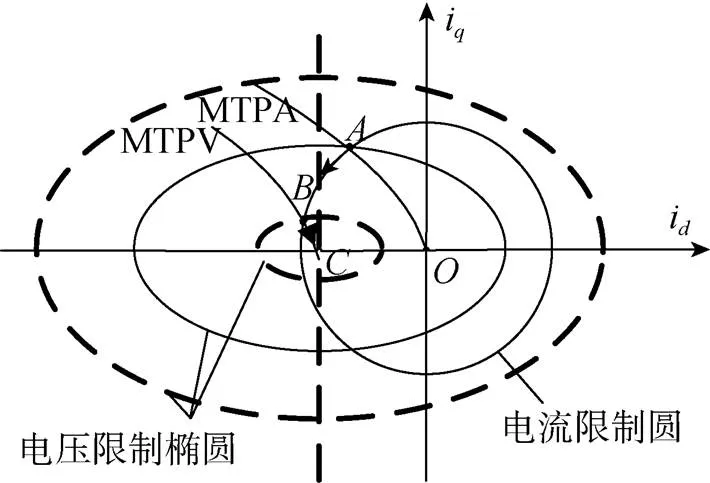
圖2 PMSM電流及電壓約束
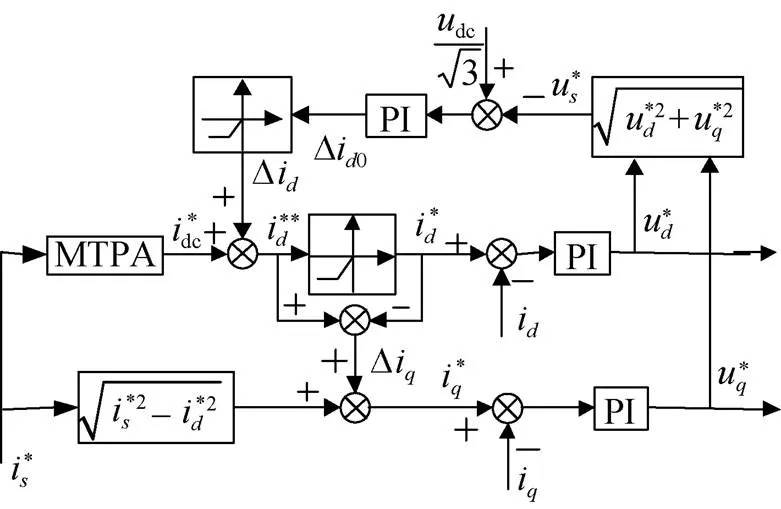
圖3 基于電壓反饋的弱磁控制策略框圖
2 改進PMSM弱磁性能的控制策略
2.1 弱磁工況下動態性能不佳的原因


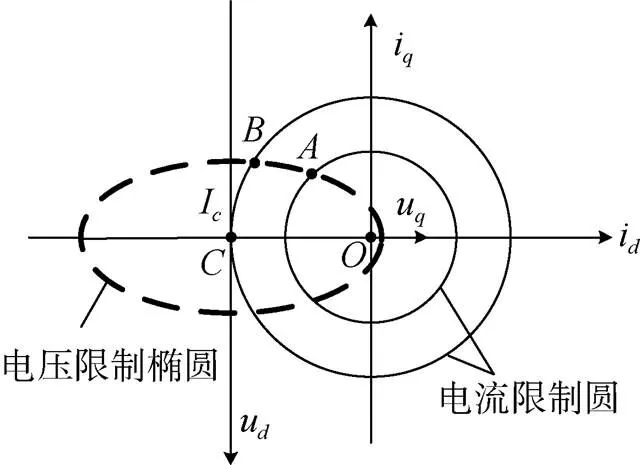
圖4 轉矩發生突變時電流理想軌跡


2.2 弱磁控制策略的提出
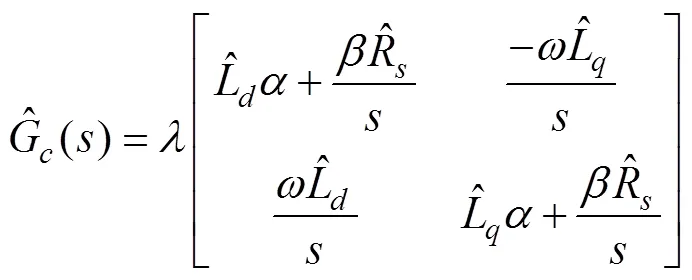
內模控制(internal model control, IMC)是一種對參數變化不敏感的魯棒控制方法, 作為一種先進的控制策略被廣泛應用于PMSM電流解耦, 可以較好地抑制PMSM參數估計誤差。

式中, I為2階單位矩陣。

分析PMSM傳遞函數的零極點分布, 可知其右半平面無零點, 且其機電時間常數比電磁時間常數大得多。所以, 在高頻情況下可將電流環近似看作1階系統。為提高性能, 根據IMC原理, 取低通濾波器

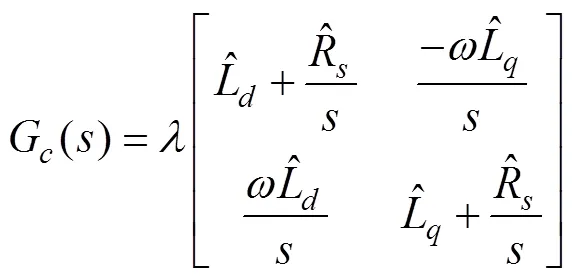
根據式(7)~式(10), 得到
結合上述分析, 得到如圖6所示的PMSM內模解耦控制框圖。

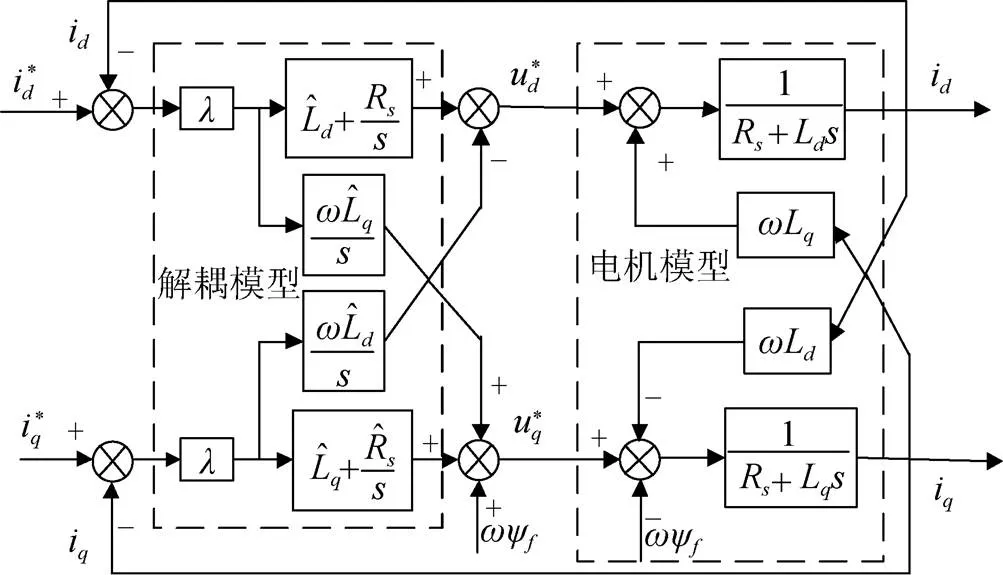
圖6 PMSM內模解耦控制框圖

根據專家經驗及試驗分析將模糊推理系統中輸入和輸出各變量的模糊集、論域及隸屬度函數定義如下:
2) 輸入的論域選取為[–3, 3], 輸出的論域選取為[–3, 3];
3) 輸入的隸屬度函數均為高斯型, 輸出的隸屬度函數為三角型。

表1 積分調節因子修正值的模糊控制規則表

表2 電流調節因子修正值的模糊控制規則表
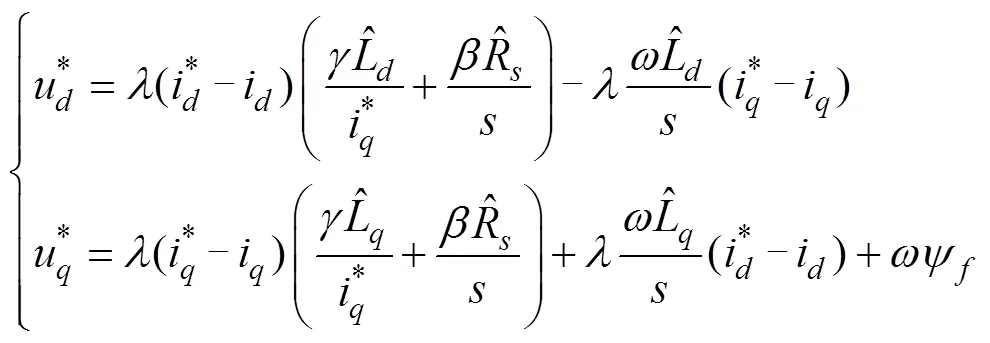
結合圖4, 對式(15)分析可知, 在PMSM弱磁恒速工況下, 轉矩指令發生階躍時, 期望電流和發生突變, 的變化方向仍與系統需求一致, 電流調節因子的分母則直接減緩了的變化率, 從源頭有效抑制調節器飽和, 從而減輕了交軸電流調節器的負擔, 加快了電流動態響應。
3 仿真分析與試驗驗證
在PMSM交流調速平臺上, 對弱磁控制策略在電動工況下的控制性能進行了仿真分析和試驗驗證, PMSM的參數如表3所示。
3.1 仿真分析
圖8是PMSM在6 000 r/min的轉速下, 轉矩在0~58 N·m間階躍時的電流響應波形。

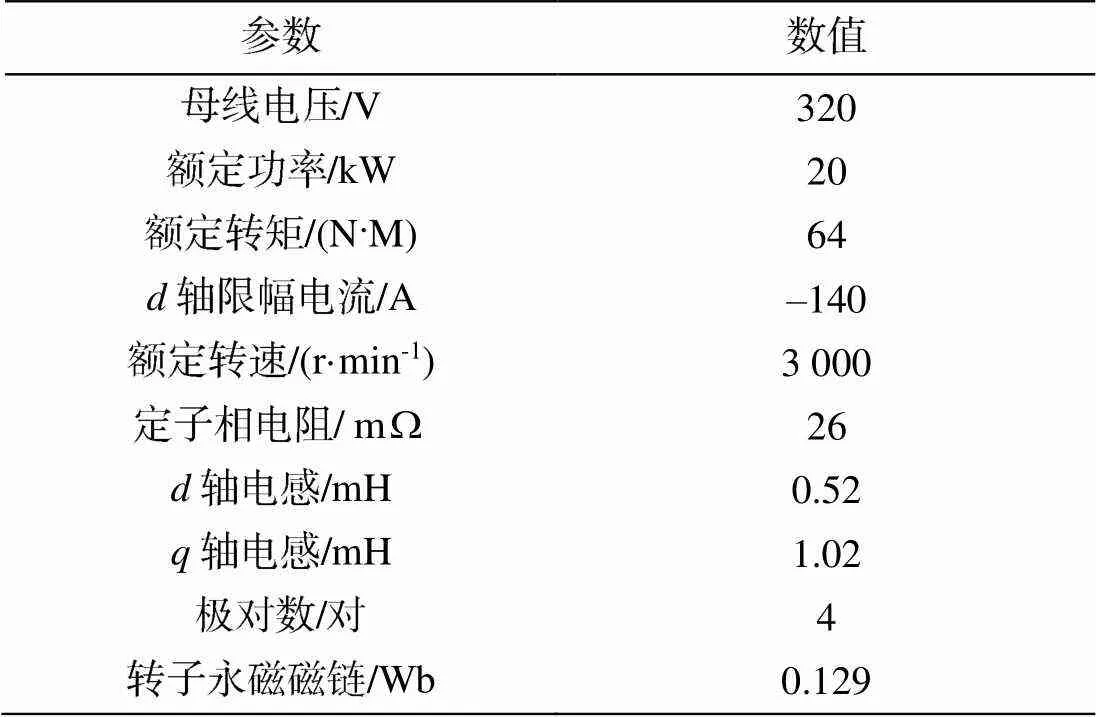
表3 電機參數
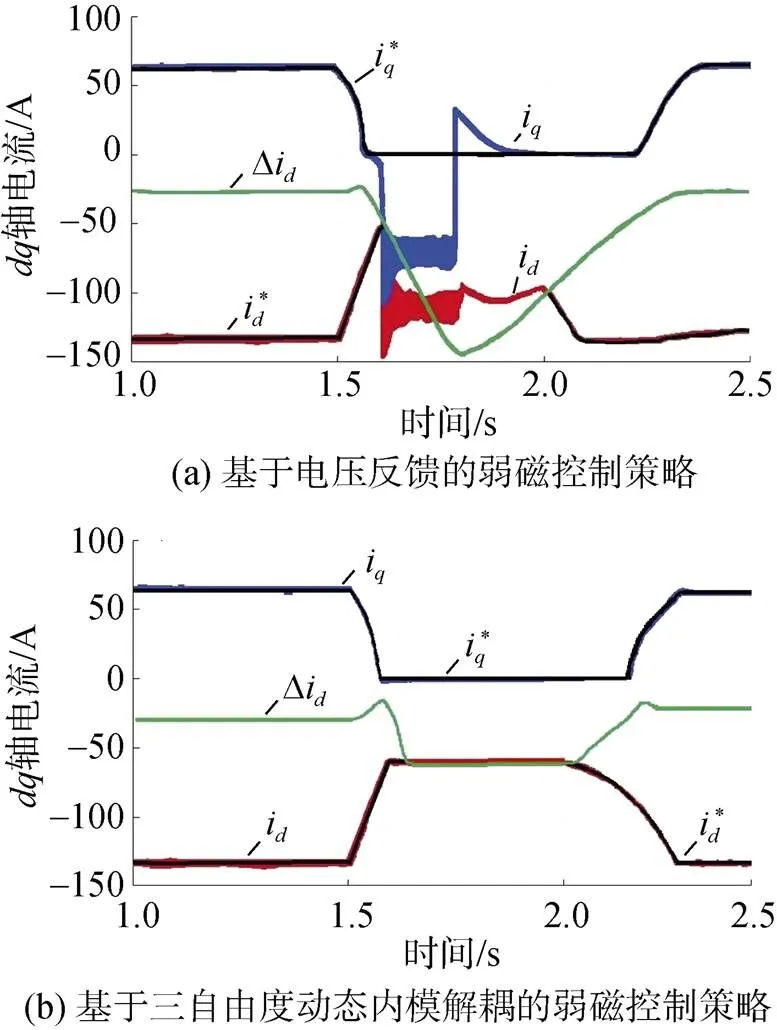
圖8 轉速6 000 r/min轉矩突變時電流響應
3.2 試驗驗證
試驗平臺如圖9所示。

圖9 試驗平臺
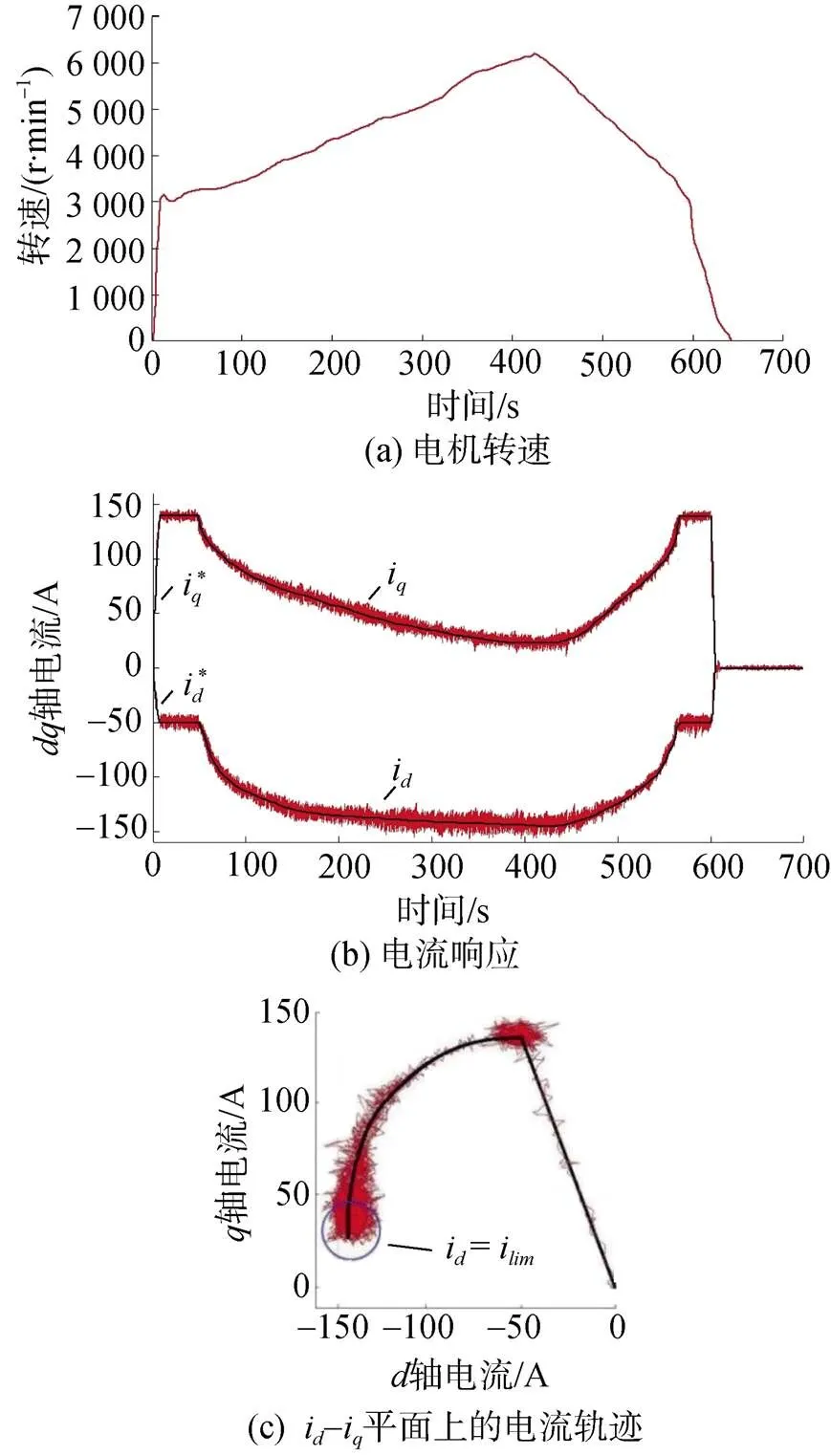
圖10 基于電壓反饋的弱磁控制策略電流響應曲線
整個過程中, 2種弱磁控制策略下的交直軸電流均能跟隨電流指令, 且相同轉速下的交直軸輸出電流相等, 故在弱磁擴速性能及轉矩輸出性能上, 提出的弱磁控制策略與基于電壓反饋的弱磁控制策略相當。對比圖10和圖11的電流波形可以看出, 弱磁控制策略下的電流脈動較小, 電流控制效果明顯提高。故在電流跟隨性能上, 弱磁控制策略優于基于電壓反饋的弱磁控制策略。
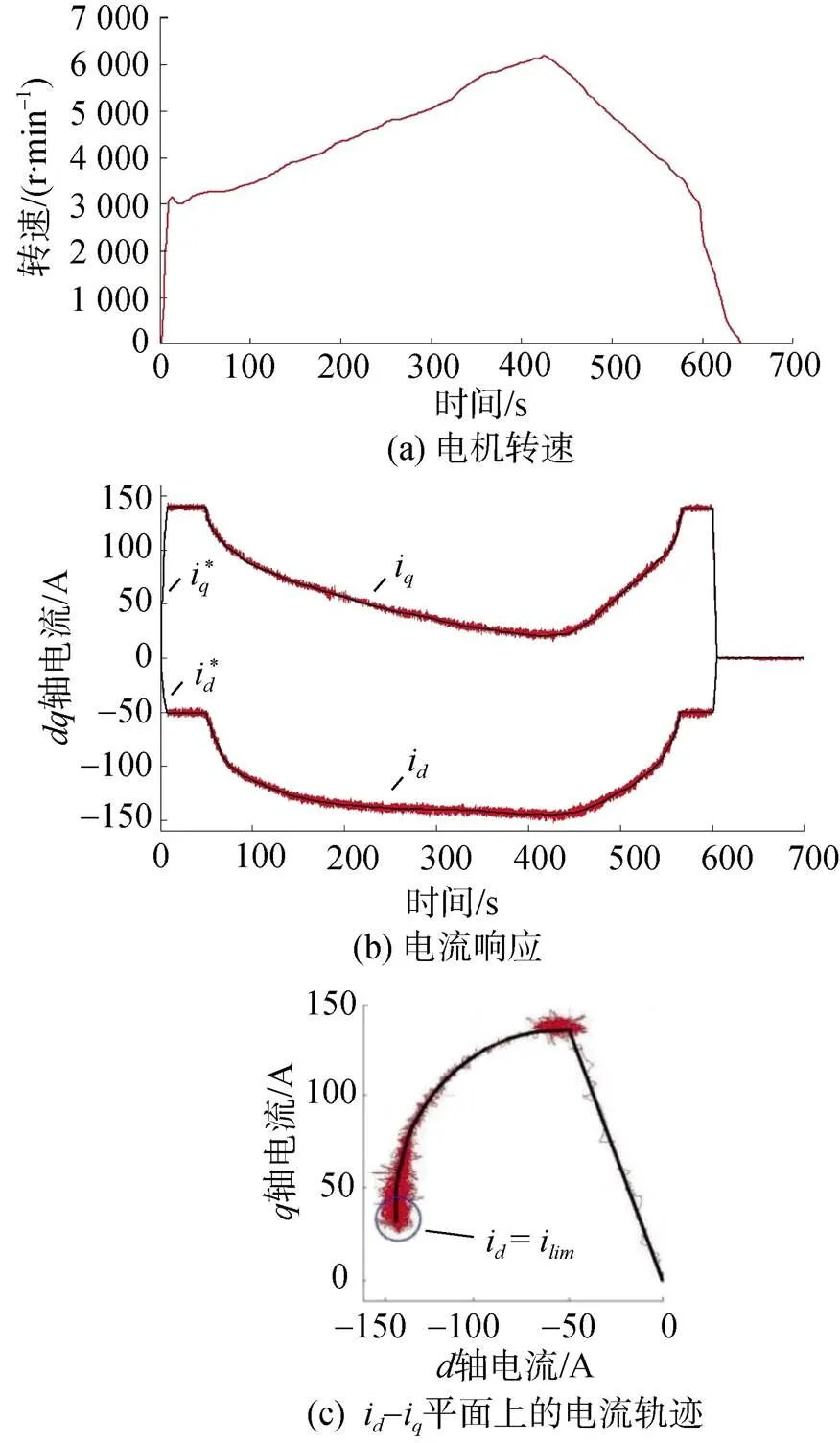
圖11 基于三自由度動態內模解耦的弱磁控制策略電流響應曲線

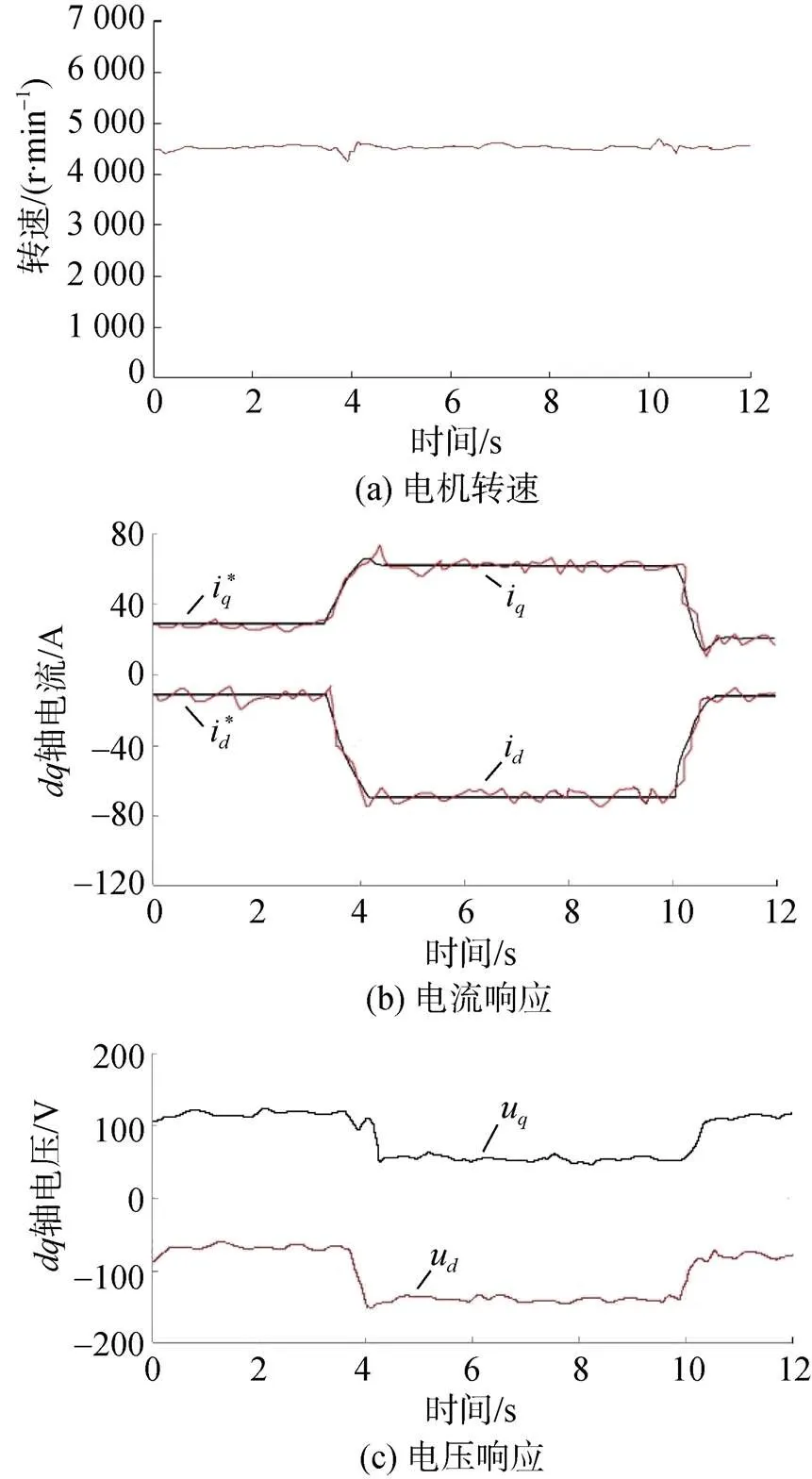
圖12 轉速4 500 r/min轉矩突變時的轉速、電流和電壓響應曲線
4 結束語
文中研究了PMSM在電動弱磁工況下動態性能不佳的根本原因: 負載轉矩突變時, 交軸電流調節器控制作用與系統需求相反, 電流耦合進一步惡化電流跟隨性能。同時提出了一種基于三自由度動態內模解耦的弱磁控制策略, 綜合解決了交軸電流調節器調節不利和交直軸電流耦合嚴重的問題, 加強電流跟隨, 消除了PMSM在電動工況下弱磁區動態過程中的電流振蕩, 提高了PMSM動態性能。該策略能有效抑制電流調節器和VSI的飽和問題, 穩態性能良好, 具有基于電壓反饋弱磁控制策略的弱磁擴速性能和轉矩輸出能力。
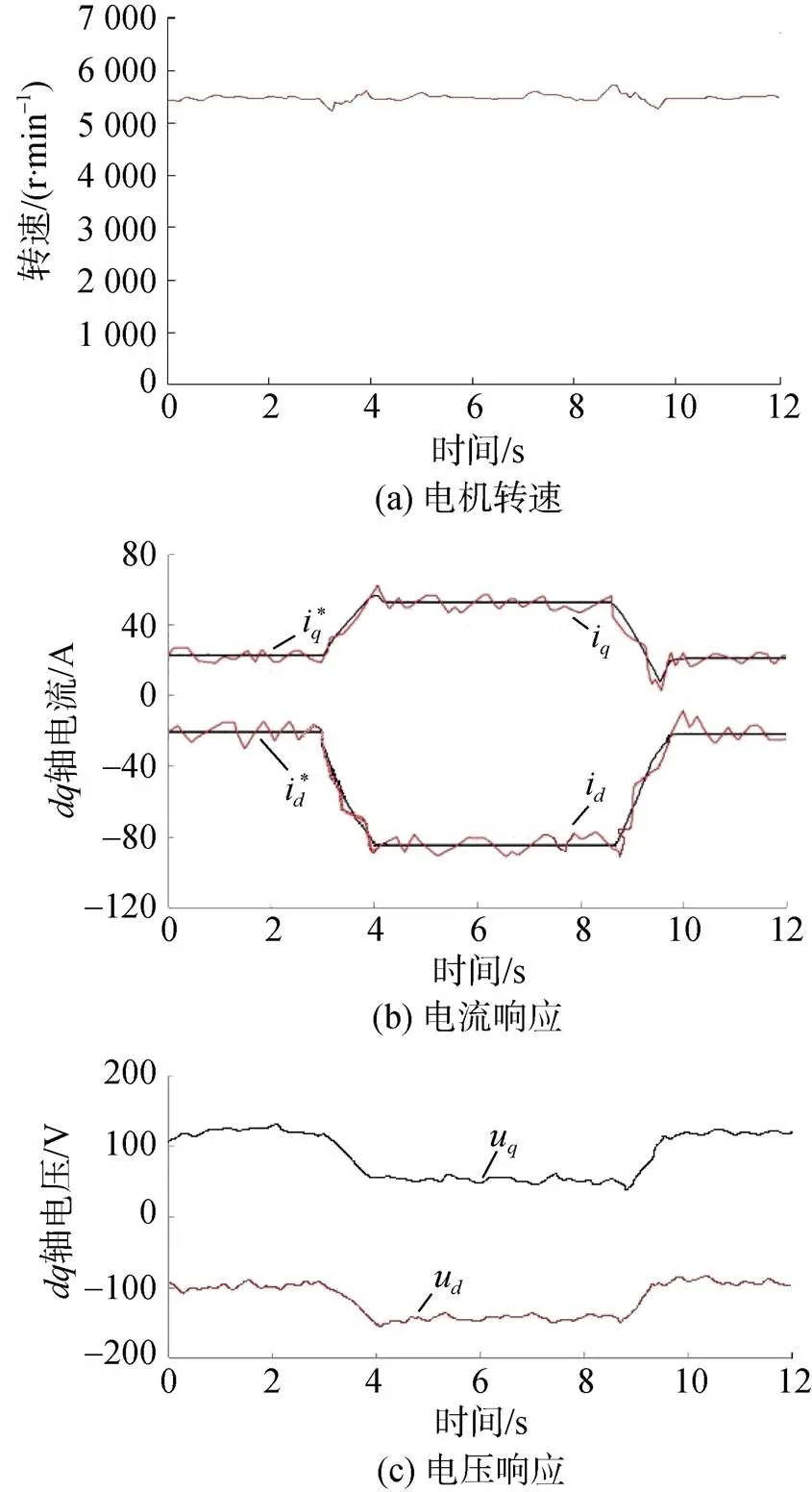
圖13 轉速5 500 r/min轉矩突變時的轉速、電流和電壓響應曲線
[1] 徐海珠, 謝順依, 崔維開. 基于脈震高頻電壓注入的對轉永磁同步電機無位置傳感器控制[J]. 魚雷技術, 2012, 20(4): 290-294. Xu Hai-zhu, Xie Shun-yi, Cui Wei-kai. Position-senseless Control of a Rotating Permanent Magnet Synchronous Motor Based on Pulsating High-frequency Voltage Injection[J]. Torpedo Technology, 2012, 20(4): 290-294.
[2] 陳坤華, 孫玉坤, 吉敬華, 等. 內嵌式永磁同步電動機弱磁控制分段線性化研究[J]. 電工技術學報, 2015, 30 (24): 17-22. Chen Kun-hua, Sun Yu-kun, Ji Jing-hua, et al. The Piece-Wise Linearization Research of Interior Permanent Magnet Synchronous Motors Field-Weakening Control[J]. Transactions of China Electrotechnical Society, 2015, 30(24): 17-22.
[3] Sneyers B, Novotny D W, Lipo T A. Field Weakening in Buried Permanent Magnet ac Motor Drives[J]. IEEE Transactions on Industry Applications, 1985, 21(2): 398-407.
[4] Jahns T M, Kliman G B, Neumann T W. Interior Permanent-magnet Synchronous Motors for Adjustable-speed Drives[J]. IEEE Transactions on Industry Applications, 1986, 22(4): 738-747.
[5] 唐朝暉, 丁強, 喻壽益, 等. 內埋式永磁同步電機的弱磁控制策略[J]. 電機與控制學報, 2010, 14(5): 68-72. Tang Zhao-hui, Ding Qiang, Yu Shou-yi, et al. Research of Flux Weakening Strategy of Interior Permanent Magnet Synchronous Motor[J]. Electric Machines and Control, 2010, 14(5): 68-72.
[6] Kwon T S, Choi G Y, Kwak M S, et al. Novel Flux-wea- kening Control of an IPMSM for Quasi-six-operation[J]. IEEE Transactions on Industry Applications, 2008, 44(6): 1722-1731.
[7] Yoo A, Sul S K, Kim H, et al. Flux-weakening Strategy of an Induction Machine Driven by an Induction Machine Driven by an Electrolytic Capacitor-less Inverter[J]. IEEE Transactions on Industry Applications, 2011, 47(3): 1328- 1336.
[8] 方曉春, 胡太元, 林飛, 等. 基于交直軸電流耦合的單電流調節器永磁同步電機弱磁控制[J]. 電工技術學報, 2015, 30(2): 140-147. Fang Xiao-chun, Hu Tai-yuan, Lin Fei, et al. Single Current Regulator Flux-Weakening Control of PMSM Based on Current Cross-Coupling Effect[J]. Transactions of China Electrotechnical Society, 2015, 30(2): 140-147.
[9] 李華, 方曉春, 林飛, 等. 異步牽引電機方波單電流閉環控制策略及其參數魯棒性分析[J]. 電工技術學報, 2018, 33(9): 2034-2043. Li Hua, Fang Xiao-chun, Lin Fei, et al. Singles Current Loop Control Strategy of Induction Traction Motor in Square Wave Mode and Its Parameter Robustness Analysis[J]. Transactions of China Electrotechnical Society, 2018, 33(9): 2034-2043.
[10] 李珂, 顧欣, 劉旭東, 等. 基于梯度下降法的永磁同步電機單電流弱磁優化控制[J]. 電工技術學報, 2016, 31(15): 8-15. Li Ke, Gu Xin, Liu Xu-dong, et al. Optimized Flux Weakening Control of IPMSM Based on Gradient Descent Method with Single Current Regulator[J]. Transactions of China Electrotechnical Society, 2016, 31(15): 8-15.
[11] 盛義發, 喻壽益, 桂衛華, 等. 軌道車輛用永磁同步電機系統弱磁控制策略[J]. 中國電機工程學報, 2010, 30 (9): 74-79. Sheng Yi-fa, Yu Shou-yi, Gui Wei-hua, et al. Field Weakening Operation Control Strategies of Permanent Magnet Synchronous Motor for Railway Vehicles[J]. Proceedings of CSEE, 2010, 30(9): 74-79.
[12] Tursini M, Chiricozzi E, Petrella R. Feedforward Flux-weakening Control of Surface-mounted Permanent- magnet Synchronous Motors Accounting for Resistive Voltage Drop[J]. IEEE Transactions on Industrial Electronics, 2010, 57(1): 440-448.
[13] 何亞屏, 文宇良, 許峻峰, 等. 基于多模式SVPWM算法的永磁同步牽引電機弱磁控制策略[J]. 電工技術學報, 2012, 27(3): 92-99. He Ya-ping, Wen Yu-liang, Xu Jun-feng, et al. High- Power Permanent Magnet Fiux-Weakening Strategy Based on Multi-Mode SVPWM[J]. Transactions of China Electrotechnical Society, 2012, 27(3): 92-99.
[14] 朱磊, 溫旭輝, 趙峰. 永磁同步電機弱磁失控機制及其應對策略研究[J]. 中國電機工程學報, 2011, 31(18): 67-72. Zhu Lei, Wen Xu-hui, Zhao Feng. Control Policies to Prevent PMSMs from Losing Control under Field-weakening[J]. Proceedings of the Chinese Society for Electrical Engineering, 2011, 31(18): 67-72.
[15] 朱希榮, 伍小杰, 周淵深. 基于內模控制的永磁同步電機變頻調速系統的研究[J]. 電氣傳動, 2007, 37(12): 46-48.Zhu Xi-rong, Wu Xiao-jie, Zhou Yuan-shen. Research on IMC-based Variable Frequency Drive System of Synchronous Motor[J]. Electric Transmission, 2007, 37(12): 46-48.
[16] 孟釗, 李好文, 孫朋朋. 永磁同步電機電流環改進內模解耦控制的研究[J]. 電氣傳動, 2016, 46(2): 11-15, 30. Meng Zhao, Li Hao-wen, Sun Peng-peng. Research on the Improved Internal Model Decoupling Control of Current Loop for Permanent Magnet Synchronous Motor[J]. Electric Drive, 2016, 46(2): 11-15, 30.
[17] 劉慧博, 王靜, 吳彥合. 無刷直流電機模糊自適應PID控制研究與仿真[J]. 控制工程, 2014, 21(4): 583-587. Liu Hui-bo, Wang Jing, Wu Yan-he. Study and Simulation of Fuzzy Adaptive PID Control of Brushless DC Motor[J]. Control Engineering of China, 2014, 21(4): 583-587.
Flux-Weakening Control of PMSM Based on Three-Degree-of-Freedom Dynamic Internal Model Decoupling
YOU Qian-liang1,2, WEI Hai-feng1,2, CHANG Xu1,2, TIAN Hui-feng1,2
(1. Jiangsu University of Science and Technology Zhenjiang 212003 China; 2. SuZhou Dongda Goldenpoint Technology Co., Ltd, Zhangjiagang 215000, China)
Aiming at the problem that the dynamic performance of permanent magnet synchronous motor(PMSM) of undersea vehicle propulsion system in flux-weakening operation is unsatisfactory, the influence of direct-quadrature axis current regulator on the dynamic performance of PMSM is studied based on the PMSM flux-weakening theory, and a flux-weakening control strategy of PMSM based on three-degree-of-freedom dynamic internal model decoupling is proposed. Considering the fact that traditional internal model decoupling cannot take the decoupling effect, response speed and steady-state error into account at the same time, current regulation factors are introduced to modify the decoupling controller. On this basis, to the problem that the direction of quadrature axis current regulation is opposite to the expected direction of the system when the output torque leaps, the information of quadrature axis current is added into the current regulation factors and the fuzzy controller is used to optimize the current regulation factors in real time. Simulation and experimental results show that the proposed strategy can synthetically solve the problems of unsatisfactory performance of quadrature axis current regulator and serious current coupling in flux-weakening operation, improve the dynamic performance of PMSM, and has the triple functions of anti-saturation, current decoupling and flux-weakening control.
undersea vehicle propulsion system; permanent magnet synchronous motor(PMSM); flux-weakening control; dynamic performance; three-degree-of-freedom dynamic internal model decoupling; anti-saturation
相關文章導航
1. 張明明, 劉維亭, 魏海峰, 等. 基于滑模觀測器的PMSM單相霍爾位置傳感器故障容錯控制算法[J]. 水下無人系統學報, 2019, 27(6).
2. 張珂, 李鵬, 顏開, 等. 空化器操縱過程水動力試驗方法[J]. 水下無人系統學報, 2019, 27(4).
3. 符盼; 王建平. 浸水式無刷直流電機瞬態溫度場分析[J]. 水下無人系統學報, 2018, 26(1).
4. 郭志榮, 高峰, 王其林. 基于RBF網絡和MRAS的魚雷永磁同步電機無速度傳感器控制方法[J]. 水下無人系統學報, 2017, 25(6).
5. 樊曉波, 胡利民. 充磁方式對永磁無刷直流電機激振力波的影響[J]. 魚雷技術, 2016, 24(6).
6. 李宏, 張鵬舉. 雙三相電機感應電機矢量控制研究[J]. 魚雷技術, 2016, 24(5).
7. 王俊杰, 馬恩林. 無鐵心盤式PMSM損耗和溫度研究[J]. 魚雷技術, 2015, 23(5).
8. 吳凇, 陳鋼. 基于量子遺傳算法的電機優化相關策略及參數選擇[J]. 魚雷技術, 2015, 23(2).
9. 吳凇, 陳鋼. 改進量子遺傳算法在電機結構優化中的應用[J]. 魚雷技術, 2015, 23(1).
10. 錢鑫, 王崇武, 于琨琨, 等. 基于遞推最小二乘法的永磁同步電機參數辨識[J]. 魚雷技術, 2014, 22(6).
11. 王松林, 謝順依, 張林森. 無刷直流電機直接轉矩控制下的轉矩脈動抑制[J]. 魚雷技術, 2014, 22(3).
TJ630.2; TM351
A
2096-3920(2020)01-0057-10
10.11993/j.issn.2096-3920.2020.01.009
尤錢亮, 魏海峰, 常徐, 等. 基于三自由度動態內模解耦的PMSM弱磁控制[J]. 水下無人系統學報, 2020, 28(1): 57-66.
2019-07-10;
2019-08-14.
國家自然科學基金項目(51977101); 江蘇省省重點研發計劃產業前瞻與共性關鍵技術重點項目(BE2018007); 江蘇省研究生科研與實踐創新計劃項目資助.
尤錢亮(1995-), 男, 在讀碩士, 主要從事電機驅動控制研究.
(責任編輯: 許 妍)
猜你喜歡
艦船科學技術(2022年8期)2022-06-05 07:37:02
能源工程(2020年6期)2021-01-26 00:55:22
山東冶金(2019年3期)2019-07-10 00:54:04
消費導刊(2018年10期)2018-08-20 02:57:02
山東工業技術(2016年15期)2016-12-01 05:31:37
通信電源技術(2016年1期)2016-04-16 04:57:26
電測與儀表(2016年20期)2016-04-11 11:38:24
通信電源技術(2016年5期)2016-03-22 01:09:38
電機與控制應用(2015年2期)2015-03-01 03:49:24
電測與儀表(2014年24期)2014-04-09 11:35:36
