低頻寬帶多波束聲吶系統設計及試驗研究
2020-03-06 09:47:30姜春華王心怡納杰斯劉寶軍何其煜丁明惠
水下無人系統學報 2020年1期
岳 雷, 姜春華, 羅 松, 王心怡, 納杰斯, 馬 雪, 劉寶軍, 何其煜, 丁明惠
低頻寬帶多波束聲吶系統設計及試驗研究
岳 雷, 姜春華, 羅 松, 王心怡, 納杰斯, 馬 雪, 劉寶軍, 何其煜, 丁明惠
(昆明船舶設備研究試驗中心, 云南 昆明, 650051)
聲學方法探測沉底及掩埋小目標在沉埋雷探測、海洋油氣田管線定位等軍民技術應用領域有著迫切需求及重要意義。文中概述了淺地層剖面儀、合成孔徑聲吶及海底三維成像系統等幾種主流聲學探測沉底及掩埋目標技術裝備的現狀及特點, 分析了各自優勢及存在的不足。并針對沉底及掩埋有限長管線目標探測需求, 分析了低頻寬帶多波束聲吶探測沉底及掩埋有限長管線目標的混響抑制及空間分辨能力, 設計了系統的技術指標、使用方式、聲探測基陣技術方案、硬件技術方案、信號處理流程、軟件界面及軟件處理流程, 歸納總結了文中設計的低頻寬帶多波束聲吶系統特點, 在湖上完成了沉底有限長管線目標的試驗驗證。結果表明, 低頻寬帶多波束聲吶能可靠并有效地探測沉底管線目標。
聲學探測; 沉底及掩埋小目標; 管線; 低頻寬帶多波束聲吶
0 引言
水下沉底及掩埋小目標的探測在軍事及民用領域有著重要意義, 如海戰中探測到敵方布放的水雷后掃雷以減小我方損失; 定位海洋油氣田沉埋管線的路由, 估計其懸跨或埋設深度, 掌握海底管線情況, 及時發現隱患并予以排除, 保障海底管線的安全運行等[1]。
探測沉底小目標需要有足夠高的空間分辨率, 因此, 探測信號需要有較高的距離分辨率, 檢測波束需要有較高的空間角度分辨率; 探測掩埋目標還需要考慮聲波對海底有一定深度的穿透能力, 探測信號的頻率通常在40 kHz以內[2]。因此, 要同時具備以上探測能力, 宜采用低頻寬帶聲學探測系統。聲學方法探測掩埋小目標面臨的技術難點主要包括目標的有效“照射”和有效接收問題、海底界面的強混響干擾、小目標散射特性的空間不均勻性問題等[3]。
目前, 探測沉底及掩埋小目標采用的聲學探測技術和裝備包括淺地層剖面儀、合成孔徑聲吶及海底三維成像系統[4]。
從20世紀70年代起, 國外學者就開始了淺剖探測技術的研究, 目前其淺地層剖面探測技術比較成熟, 已實現淺地層剖面探測系統的產品化、產業化及系列化。國際從事深海淺地層剖面探測系統的生產廠商主要有: 美國的EdgeTech、Teledyne和SyQwest, 挪威的Kongsberg和德國的Innomar等公司[4]。其中: Innomar公司生產了可以船載的SES-96、SES2000參量陣剖面儀、Chirp III淺地層剖面儀等[5-7]; Kongsberg公司研制的TOPAS PS 180可以在全海深(11 000 m)實現高分辨率的淺地層剖面測量, 差頻發射聲源級達204 dB, 可穿透200 m的黏土底質, 獲得0.15 m的垂直分辨率。圖1為TOPAS PS 180淺地層剖面儀的系統組成圖, 圖2為典型淺地層剖面儀探測到的掩埋管線圖。Deimling等[8]研究了參量陣技術在不同掠射角下探測掩埋電纜的性能, 理論分析及試驗結果表明, 40°掠射角時, 在泥質沉積層中, 掩埋電纜的回波信混比最大, 探測效果最好。Tesei等[9]研究了有限長圓柱體目標的低頻聲散射特性, 并采用參量發射陣發射1~15 kHz的差頻寬帶探測信號, 128陣元的接收陣(孔徑11.41 m)接收回波經多波束信號處理, 完成了掩埋目標的探測。
低頻合成孔徑聲吶技術是一種穿透性好、分辨率高的成像聲吶系統, 可搭載在無人水下航行器(unmanned undersea vehicle, UUV)、水面船等多種平臺上, 用以完成掩埋小目標成像、地貌成像、海底管道探測, 以及海底光纜探測等多種復雜任務[10]。

圖1 TOPAS PS 180淺地層剖面儀系統組成圖

圖2 淺地層剖面儀探測到的沉埋管線圖
近幾年, 國內蘇州桑泰海洋儀器公司成功研制了高低頻組合應用的雙頻合成孔徑聲吶, 其低頻采用8~16 kHz、高頻采用100~120 kHz的寬帶探測信號, 低頻合成孔徑聲吶方位向(航向)的分辨率為0.20 m、距離向(橫向)的分辨率為0.10 m, 最大探測埋深為2 m; 高頻合成孔徑聲吶方位向(航向)的分辨率為0.08 m, 距離向(橫向)的分辨率為0.05 m。圖3所示為雙頻合成孔徑聲吶外形圖, 圖4為雙頻合成孔徑聲吶探測的掩埋線纜。此外, Xiang等[11]研究了淺水低頻合成孔徑聲吶抑制多徑的信號處理方法, 研制了適用于自主式水下航行器(autonomous undersea vehicle, AUV)搭載的合成孔徑聲吶樣機并通過試驗驗證; Williams[12]研究了合成孔徑聲吶的一種快速成像方法, 已完成多次海試, 取得了較好的探測效果。
海底三維成像系統基于高效率的軟硬件數據處理技術, 并采用高低頻聲學探測組合方式, 可對一定范圍和尺度下的海底底質進行三維成像。2016年, 英國南安普頓國家海洋學中心研發了Chirp型海底三維成像系統。該系統重203 kg, 尺寸為4.35 m× 3.10 m×1.95 m, 工作頻率1.5~13 kHz, 接收陣列共有240個水聽器, 水平面的分辨率為0.25 m×0.25 m, 可以對海底掩埋物進行成像, 其外形如圖5所示, 其探測的目標成像如圖6所示。圖中, 縱坐標twt表示雙程傳播時間[13]。

圖3 雙頻合成孔徑聲吶外形圖

圖4 雙頻合成孔徑聲吶探測的掩埋線纜圖

圖5 Chirp型海底三維成像系統外形圖
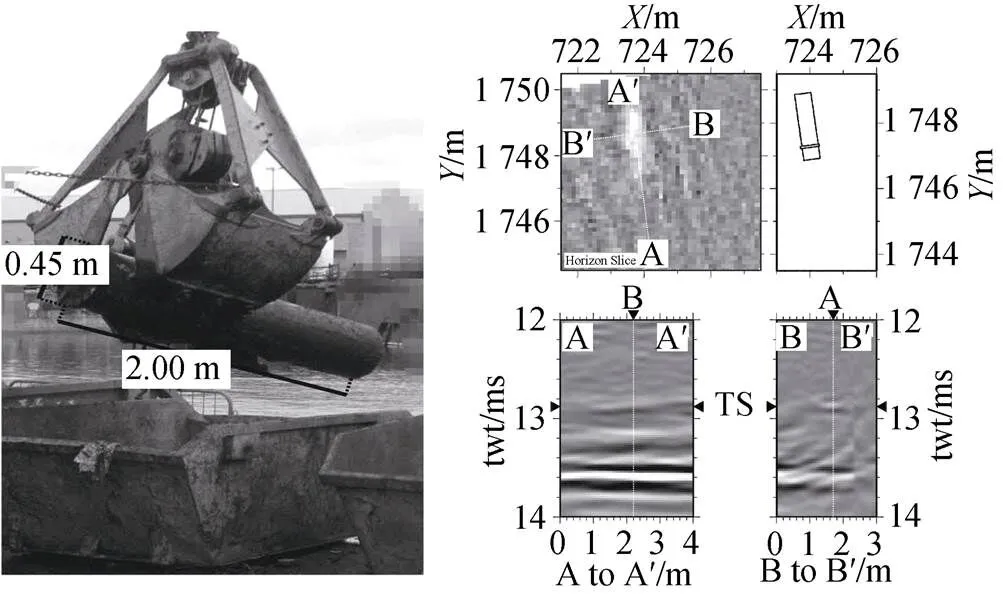
圖6 Chirp型海底三維成像系統探測的掩埋目標成像圖
Hamschin等[14]根據目標的散射函數(或頻率響應)設計了最優聲吶探測波形, 對于沉底目標的探測性能較好, 但對于全掩埋目標來說, 寬帶線性調頻信號比最優聲吶探測波形有著更好的探測性能。
此外, 將時反(time reversal, TR)和多輸入多輸出(multiple input multiple output, MIMO)結合的聲學探測沉底或掩埋目標技術[15-16]以及仿生探測技術方法[17-18]也有相關研究, 但都停留在理論分析和實驗室研究階段。
淺地層剖面技術具有較強的沉積層穿透能力, 但其目前只能采用的單波束工作方式決定了其較低的探測效率; 低頻合成孔徑聲吶技術兼具一定穿透沉積層的能力和較高的航向分辨率(該分辨率和其物理孔徑大小無關), 但也存在只能后處理而不能實時處理的不足; 海底三維成像系統對掩埋物具有較高的成像分辨能力, 但較高的分辨能力也表明其物理孔徑不會太小, 該工作方式限制了其應用環境。
針對當前幾種主流聲學探測沉埋目標技術裝備的不足, 根據沉底及掩埋有限長管線目標探測需求, 文中設計了低頻寬帶多波束聲吶(如非特別說明, 后文簡稱多波束聲吶)系統,并完成了探測沉底管線目標的湖上試驗驗證。
1 低頻寬帶多波束聲吶探測能力分析
探測沉底及掩埋有限長管線目標過程中, 海底混響是多波束聲吶的主要干擾, 通過分析多波束聲吶探測目標回波信混比及探測目標分辨能力, 可為多波束聲吶提供設計依據。
1.1 多波束聲吶探測目標回波信混比分析
沉底及掩埋有限長管線目標回波信混比為[19-21]

對于沉底有限長管線目標來說, 其目標強度為[19-21]

對于沉埋有限長管線目標來說, 還需考慮聲波穿透沉積層2次透射及傳播衰減引起的目標強度變化量, 其目標強度為[21-22]

其中

根據式(1)~式(4)及文獻[12]分析, 沉底及掩埋有限長管線目標的探測宜采用小掠射角方式探測(即側掃聲吶工作方式), 該探測方式可在提高目標回波信混比的同時擴大探測范圍(即提高探測效率)。
根據式(1)~式(4)可知, 掩埋有限長管線目標的探測, 其目標回波信混比受沉積層特性影響大, 而大部分淺海大陸架屬于高聲速海底, 因此取Hamilton對沉積層分類中的泥類分析目標回波信混比; 受遙控水下航行器(remotely operated vehicle, ROV)安裝限制, 多波束聲吶聲探測基陣尺寸不能太大; 為保證聲波對沉積層有一定的穿透能力, 宜采用低頻探測信號。仿真多波束聲吶探測沉底及掩埋有限長管線目標回波信混比如圖7和圖8所示, 相關參數如表1所示。

圖7 探測信號頻率不同時目標回波信混比隨掩埋深度變化曲線

圖8 掠射角不同時目標回波信混比隨掩埋深度變化曲線

表1 掩埋目標及沉積層參數列表
圖7仿真結果表明, 探測信號的頻率越低,可探測管線目標的掩埋深度越大; 圖8仿真結果表明, 掠射角越小, 可探測管線的掩埋深度越大。
1.2 多波束聲吶探測目標分辨能力分析
為提高混響抑制能力及橫向分辨能力, 宜采用寬帶探測信號。寬帶線性調頻信號具有良好的混響抑制能力及脈沖壓縮特性, 采用5~15 kHz的線性調頻信號作為探測信號。


圖9 多波束聲吶探測范圍及分辨率示意圖

2 低頻寬帶多波束聲吶系統設計
2.1 多波束聲吶系統總體設計
根據多波束聲吶探測能力分析, 滿足泥類沉積層下沉底和一定掩埋深度(如1 m)有限長管線目標的探測需求, 并適用于ROV搭載, 設計的多波束聲吶技術指標為:
1) 探測范圍不小于50 m×20 m;
2) 可探測沉底及掩埋深度不大于2 m的海底管線目標;
3) 多波束聲吶的橫向分辨率優于0.10 m, 航向分辨率優于0.30 m。
圖10為海底管線探測及定位原理圖。ROV搭載多波束聲吶在海床上定高航行, 通過多波束聲吶探測海底管線相對于ROV的方位及距離, ROV相對于水面支持船的位置由船上安裝的超短基線聲吶(ultra-short baseline, USBL)測量, 水面支持船的位置由船用全球定位系統(global positioning system, GPS)定位設備測量, 通過數據融合處理估計海底管線路由、沉埋、懸跨參數和大地坐標位置。圖11所示為設計的多波束聲吶及安裝效果圖。

圖10 海底管線探測及定位原理圖

圖11 多波束聲吶安裝效果圖
圖12為多波束聲吶和各測量設備的供電及數據傳輸協議圖。多波束聲吶獲取的回波數據量大, ROV到水面支持船的臍帶纜長將多波束聲吶獲取的回波在水下轉換成光信號, 并傳輸到水面的計算機進行處理。船用GPS、USBL和高度計獲取的數據量小, 可采用RS485串口傳輸。

圖12 多波束聲吶和各測量設備供電及數據傳輸協議圖
2.2 多波束聲吶聲探測基陣方案設計
目標的有效“照射”是探測沉底及掩埋目標的關鍵技術, 解決這一關鍵技術需同時兼顧探測效率及空間抑制混響能力, 從傳感器角度考慮, 宜采用面尺度發射基陣和檢測基陣。圖13為設計的聲探測基陣及安裝結構, 安裝傾角可調(具有30°、45°、60°共3個角度), 圖14為聲探測基陣陣元尺寸及間距。

圖13 聲探測基陣及安裝結構圖

圖14 聲探測基陣陣元尺寸及間距圖(單位: mm)
發射基陣采取2×2組陣方式, 換能器為喇叭型, 陣元間距0.14 m; 檢測基陣為2個12×4面陣形式, 安裝在發射基陣的兩側, 陣元間距0.05 m。為進一步提高探測目標的空間混響抑制能力, 約束檢測基陣的長度方向每陣元指向性50°~60°、寬度方向每陣元指向性30°~40°; 為避免水面后向反射回波對檢測的影響, 設計檢測基陣后輻射抑制不小于10 dB。


圖15 實測換能器發射響應曲線

圖16 實測換能器檢測靈敏度曲線
2.3 多波束聲吶硬件方案設計
多波束聲吶硬件用于實現聲發射信號的功率放大, 聲檢測信號的采集、傳輸及模擬預處理。多波束聲吶硬件組成見圖17, 包括聲發射功放、電源管理模塊、前置放大電路及信號采集電路。其中, 前置放大電路包括放大電路和濾波電路。為了增加信號動態范圍, 前端加入了程控放大器, 其組成框圖和信號處理流程見圖18。

圖17 多波束聲吶硬件設計組成框圖

圖18 聲信號處理電路組成框圖
帶通濾波器的帶通濾波電路設計為8階Bu- tterworth、濾波頻帶為1~30 kHz。AD采集器基于FPGA設計, 具備同時24通道200 kS/s速率與16 bit精度的信號采集能力, 基于用戶數據報(user datagram protocol,), 采用千兆以太網傳輸采集數據。
2.4 多波束聲吶軟件設計
1) 多波束聲吶信號處理設計
多波束聲吶信號處理流程見圖19, 其步驟如下。

圖19 多波束聲吶信號處理流程圖
a. 數字帶通濾波
采用數字有限沖激響應(finite impulse respo- nse, FIR)帶通濾波器濾除回波信號頻帶外的噪聲, 濾波器階數根據實際情況設定, 文中設計的濾波器階數為64、濾波頻帶為3~20 kHz。
b. 無畸變高分辨多波束形成
沿檢測基陣長度方向形成多個無畸變高分辨空間檢測波束, 將經過數字帶通濾波的信號進行快速傅里葉變換(fast Fourier transform, FFT)處理, 同多個空間檢測波束相乘, 獲取每個波束域的回波信號, 即




其中

式中,表示陣元間距。
c.回波包跡獲取
將獲取的多個高分辨波束域數據同發射信號在頻域進行脈沖壓縮處理, 再進行抗混響濾波, 獲取回波包跡。
d.像素融合
由不同波束域的回波包跡生成像素網格, 并對像素網格進行歸位、校準及融合, 最終實現對沉埋管線的探測。
2) 基于LabVIEW平臺的多波束聲吶軟件設計
根據多波束聲吶使用需求, 設計的多波束聲吶軟件如圖20所示, 軟件界面包括用戶配置區、圖形界面顯示區、數據通信監控區及結果顯示區。其中: 用戶配置區用于發射信號參數設置、接收信號的程控放大倍數設置等功能實現; 圖形界面顯示區用于探測信號及回波的時域顯示、估計的目標角度及距離波形顯示、目標聲圖顯示; 數據通信監控區用于監測網絡數據傳輸狀態; 結果顯示區用于目標角度、距離及回波強度的顯示。
多波束聲吶軟件流程如圖21所示, 軟件具備實時探測和數據回放2種工作方式。

圖20 多波束聲吶圖形用戶界面

圖21 多波束聲吶軟件流程圖
2.5 多波束聲吶系統特點
1) 多波束聲吶分別有30°、45°和60°共3個可調的安裝傾角, 適應ROV搭載, 使用方式靈活便捷;
2) 多波束聲吶采用低頻寬帶探測信號, 可同時兼顧沉底及掩埋有限長管線目標的探測需求, 探測效率高;
3) 多波束聲吶聲探測基陣及硬件平臺具有良好的信號發射、采集、傳輸及預處理性能;
4) 多波束聲吶信號處理方法基于FFT算法, 采用Labview軟件實現, 具有實時性好、開發效率高的特點;
5) 多波束聲吶系統采用TCP/IP數據傳輸協議, 方便后續目標融合定位及顯控處理。
3 多波束聲吶探測沉底管線試驗
在湖試水域完成多波束聲吶探測沉底管線試驗, 該水域水深大于25 m, 試驗方案見圖22。

圖22 多波束聲吶探測沉底管線試驗方案圖
試驗船停靠在碼頭外側, 將管線布放在距離試驗船30 m處并沉底, ROV入水定高航行, 航行高度約20 m, 勻速近似平行管線(不大于±10°, 距管線水平距離在10~30 m之間)航行, 多波束聲吶實時探測并返回探測結果。圖23為管線布放及ROV入水航行現場照片。

圖23 管線布放及遙控水下航行器入水航行試驗
圖24為低頻寬帶多波束聲吶軟件界面及沉底管線探測結果圖。試驗探測到的目標回波顯著, 背景均勻。圖25為海底管線探測信息綜合處理軟件界面及沉底管線定位結果圖, 圖中坐標(0, 0)為試驗船上USBL位置, 黃色區域為ROV航跡, 紅色區域為定位的管線位置。

圖24 多波束聲吶軟件界面及沉底管線探測結果圖

圖25 海底管線探測信息綜合處理軟件界面及沉底管線定位結果圖
圖24和圖25表明設計的多波束聲吶能夠可靠并穩定地探測到有限長沉底管線, 結合船用GPS、USBL、高度計結果數據, 能可靠并穩定計算出管線路由。
4 結束語
文中基于聲吶方程、海底沉積層聲傳播特性及待探測管線目標聲反射特性, 設計并研制了適用于淺水環境下的低頻寬帶多波束聲吶, 該聲吶具有使用方式靈活、探測效率高、實時性好等特點;在湖上完成了沉底管線的探測試驗。
試驗結果表明, 低頻寬帶多波束聲吶能可靠并有效地探測沉底管線目標。文中設計的低頻寬帶多波束聲吶系統具有良好的工程應用前景。下一步將繼續開展低頻寬帶多波束聲吶探測掩埋管線目標的試驗研究及其在深水區域探測沉底及掩埋目標的適應性研究。
[1] 韓孝輝, 李亮, 茍鵬飛. 探測海底輸油氣管線狀態的方法[J]. 工程地球物理學報, 2017, 14(6): 11-17.Han Xiao-hui, Li Liang, Gou Peng-fei. Methods for Detecting the State of Submarine Oil and Gas Pipeline[J]. Chinese Journal of Engineering Geophysics, 2017,14(6): 11-17.
[2] 陳思行, 劉亮. 一種海底小目標近距離探測系統及試驗研究[J]. 艦船科學技術, 2017, 39(4): 135-139. Chen Si-xing, Liu Liang. A Kind of Seafloor Small Target Close Detection System and Its Experimental Research[J]. Ship Science and Technology, 2017, 39(4): 135-139.
[3] 陳曉鵬, 周利生. 掩埋小目標聲探測技術研究[J]. 聲學技術, 2012, 31(1): 30-35.Chen Xiao-peng, Zhou Li-sheng. Review of Current Status of Buried-object Detection Techniques[J]. Technical Acoustics, 2012, 31(1): 30-35.
[4] 楊敏, 宋湦, 王芳, 等. 掩埋海底管道探測方法及新技術應用研究[J]. 海洋科學, 2015, 39(6): 129-132.Yang Min, Song Sheng, Wang Fang, et al. Discussion Methods of Buried Submarine Pipeline Detection and Application of New Technology[J]. Marine Sciences, 2015, 39(6): 129-132.
[5] 張同偉, 秦升杰, 王向鑫, 等.深海淺地層剖面探測系統現狀及展望[J].工程地球物理學報, 2018, 15(5): 547- 554. Zhang Tong-wei, Qin Sheng-jie, Wang Xiang-xin, et al. Technical Status and Development Trend of Deep Sea Sub-bottom Profiler[J]. Chinese Journal of Engineering Geophysics, 2018, 15(5): 547-554.
[6] 王圣豹. 多波束參量陣淺地層剖面儀測深分機接收與采集電路設計[D]. 哈爾濱: 哈爾濱工程大學, 2012.
[7] 魏志強, 張志強, 蔣俊杰. 淺地層剖面儀在大亞灣海底管道檢測中的應用[J]. 海洋測繪, 2009, 29(6): 71-73.Wei Zhi-qiang, Zhang Zhi-qiang, Jiang Jun-jie. Application of Subbottom Profiler in Inspecting Investigation of Daya Bay Seabed Pipeline[J]. Hydrogaphic surveying and charting, 2009, 29(6): 71-73.
[8] Deimling J S V, Held P, Feldens P, et al. Effects of Using Inclined Parametric Echosounding on Sub-bottom Acoustic Imaging and Advances in Buried Object Detection[J]. Geo-Marine Letters, 2016, 36(2): 113-119.
[9] Tesei A, Fawcett J A, Lim R. Physics-based Detection of Man-made Elastic Objects Buried in High-density-clutter Areas of Saturated Sediments[J]. Applied Acoustics, 2008, 69(5): 422-437.
[10] 謝思捷. 灘涂掩埋管道探測與定位關鍵技術研究[D]. 天津: 天津大學, 2017.
[11] Xiang P, Chen Q, Wen X, et al. Shallow-water Wideband Low-frequency Synthetic Aperture Sonar for an Autonomous Underwater Vehicle[J]. Ocean Engineering, 2016, 118: 117-129.
[12] Williams D P. Fast Target Detection in Synthetic Aperture Sonar Imagery: A New Algorithm and Large-Scale Perfor- mance Analysis[J]. IEEE Journal of Oceanic Engineering, 2015, 40(1): 71-92.
[13] Gutowski M, Malgorn J, Vardy M. 3D Sub-bottom Profiling—High Resolution 3D Imaging of Shallow Subsurface Structures and Buried Objects[C]//Oceans 2015, Genova: IEEE, 2015.
[14] Hamschin B, Loughlin P. Sonar Waveform Design for Optimum Target Detection: The Impact of Object Burial State[C]//Oceans 2010.Sydney: IEEE, 2010.
[15] 丁振平. TR-MIMO聲納探測方法與實驗研究[D]. 杭州: 浙江大學, 2014.
[16] 李斯. 分布式相控MIMO聲納探測及實驗研究[D]. 杭州: 浙江大學, 2014.
[17] 岳雷. 一種基于雙極性脈沖信號的沉底及掩埋小目標探測方法[J]. 兵工學報, 2019, 40(1): 146-155.Yue Lei. A Detection Method Based on Bipolar Pulse for Undersea and Buried Small Targets[J]. Acta Armamentarii, 2019, 40(1): 146-155.
[18] 岳雷, 姜春華. 一種沉底小目標的主動高頻仿生波形分析及探測方法[J]. 聲學技術, 2016, 35(4): 325-330.Yue Lei, Jiang Chun-hua.The Active High Frequency Bionic Waveform Analysis and Bionic Detection Method for Small Target at Sea Bottom[J]. Technical Acoustics, 2016, 35(4): 325-330.
[19] Dix J K. 3D High-resolution Acoustic Imaging of the Sub- seabed[J]. Applied Acoustics, 2008, 69(5): 412-421.
[20] 劉伯勝, 雷家煜. 水聲學原理[M]. 2版. 哈爾濱: 哈爾濱工程大學出版社, 2010:232-233.
[21] 汪德昭, 尚爾昌. 水聲學[M]. 北京: 科學出版社, 2013: 28-32,267-279.
[22] 萬琳, 范軍, 湯渭霖. 海底掩埋物的目標強度和回聲信混比[J]. 聲學學報, 2006, 31(2): 151-157.Wan Lin, Fan Jun, Tang Wei-lin. The Target Strength and Echo-to-reverberation Ratio of a Buried Target in Sediment[J]. Acta Acustca, 2006, 31(2): 151-157.
[23] 潘云龍, 廖小滿. 基于 LabVIEW系統的水聲測向方法設計[J]. 艦船科學技術, 2016, 38(7): 91-94.Pan Yun-long, Liao Xiao-man. Direction Detecting of Underwater Acoustic Based on Labview System[J]. Ship Science and Technology, 2016, 38(7): 91-94.
[24] 王偉印, 陳毅, 王世全, 等. 基于LabVIEW的換能器輻射聲場自動測量系統[J]. 聲學與電子工程, 2019(1): 24-28.
Design and Experimental Research of Low-Frequency Broadband Multi-Beam Sonar System
YUE Lei, JIANG Chun-hua, LUO Song, WANG Xin-yi, NA Jie-si, MA Xue, LIU Bao-jun, HE Qi-yu, DING Ming-hui
(Kunming Shipbuilding Equipment Research and Test Center, Kunming 650051, China)
The present situation and characteristics of the acoustic detection technology and equipment for submerged and buried targets, including sub-bottom profiler, synthetic aperture sonar, and three-dimensional imaging systems, are summarized, and their problems and shortcomings are analyzed. In view of the detection requirements for length-finite submerged and buried pipeline targets, the reverberation suppression and spatial discrimination ability of the low-frequency broadband multi-beam sonar for detecting submerged and buried pipeline targets are analyzed. The technical specification, usage mode, technical scheme of acoustic detection array, signal processing flow, software interface and software processing flow are designed. The characteristics of the designed low-frequency broadband multi-beam sonar are summarized. The lake trial of submerged and length-finite pipeline targets detection verifies that the low-frequency broadband multi-beam sonar can detect the submerged pipeline targets reliably and effectively.
acoustic detection; submerged and buried small target; pipeline; low-frequency broadband multi-beam sonar
相關文章導航
1.尹云龍, 楊明, 楊紹瓊, 等. 基于水下滑翔機的海洋聲學背景場觀測技術[J]. 水下無人系統學報, 2019, 27(5).
2. 周彬, 王慶, 權恒恒. 基于多源信息融合的聲吶目標非威脅度評估方法[J]. 水下無人系統學報, 2018, 26(5).
3. 劉雄厚, 汪勇. 海洋聲學目標探測技術研究現狀和發展趨勢[J]. 水下無人系統學報, 2018, 26(5).
4. 王魯軍. 國外低頻主動拖曳聲吶發展現狀和趨勢[J]. 水下無人系統學報, 2018, 26(3).
5. 朱少豪, 楊益新, 汪勇. 圓柱陣特征波束分解與綜合超指向性波束形成方法[J]. 水下無人系統學報, 2018, 27(5).
6. 何心怡, 高賀, 盧軍. 逆合成孔徑成像在魚雷真假目標識別中的應用及展望[J]. 水下無人系統學報, 2017, 25(4).
TJ630; TB566
A
2096-3920(2020)01-0097-10
10.11993/j.issn.2096-3920.2020.01.014
岳雷, 姜春華, 羅松, 等. 低頻寬帶多波束聲吶系統設計及試驗研究[J]. 水下無人系統學報, 2020, 28(1): 97-106.
2019-05-06;
2019-07-08.
岳 雷(1988-), 男, 碩士, 工程師, 主要研究方向為水下信號與信息處理.
(責任編輯: 楊力軍)
猜你喜歡
工業設計(2022年8期)2022-09-09 07:43:20
鴨綠江(2021年35期)2021-04-19 12:24:18
軍民兩用技術與產品(2021年10期)2021-03-16 06:05:30
北京測繪(2020年12期)2020-12-29 01:33:58
考試與評價·高一版(2020年6期)2020-11-02 02:45:24
裝備制造技術(2019年12期)2019-12-25 03:06:46
中國洗滌用品工業(2019年4期)2019-05-11 09:27:34
中國生殖健康(2019年3期)2019-02-01 06:12:26
家庭影院技術(2017年9期)2017-09-26 03:41:45
鑿巖機械氣動工具(2016年3期)2016-03-01 04:00:25
