基于交比不變的線結構光標定方法研究
2020-03-16 03:17:39赫連雪艷
電腦知識與技術 2020年2期
赫連雪艷

摘要:線結構光測量技術是攝像機標定的方法之一,其中光平面的提取是此方法的重點和難點,本文在光平面提取的拍攝方法的基礎做了改進,有利于攝像機標定更深入的研究。
關鍵詞:攝像機標定;線結構光;交比不變
中圖分類號:TP311? ? ?文獻標識碼:A
文章編號:1009-3044(2020)02-0234-02
Abstract: Linear structured light measurement technology is one of the methods of camera calibration, and the extraction of light plane is the key and difficult point of this method. This paper improves the photography method Based on the extraction of light plane, which is conducive to the further study of camera calibration.:
Key? words: camera calibration; Linear structured light; Cross ratio unchanged
近年來,借助光學投射器進行三維測量已經成為計算機視覺領域的發展趨勢。在眾多的視覺測量方法中,以結構光視覺測量為代表的主動視覺的三維測量技術在工業環境等領域中得到了廣泛的應用。其中線結構光視覺測量具有大量程、大視場、較高精度、光條信息易于提取、實時性強及主動受控等特點。
1 線結構光測量技術
線結構光三維視覺測量的標定主要是指在標定出攝像機的內外參數后確定視覺系統的結構參數。視覺系統的結構參數主要是指光平面方程的求解。根據數學知識可知,求解光平面方程要至少獲取平面上三個不共線的點,即標定點。線結構光三維測量的標定過程涉及攝像機內外參數、標定點和光平面方程的獲取,其中標定點的獲取是重點,同時也是難點,主要是因為棋盤各靶標平面上已知的三維世界坐標點很難恰好位于線結構光平面上,使得標定點三維世界坐標的獲取變得困難。現有的方法有拉絲法、鋸齒靶標法和微分法等,但是這些方法獲取的標定點往往提取精度不高,對實驗結果造成誤差。
基于上述方法的局限性,提出了一種在交比不變定理基礎上,更利于結構光條紋準確獲取的方法。由于結構光條紋的提取首先要對結構光條紋邊緣檢測和光條紋直線方程的求解,所以利用該方法可以排除提取棋盤格上結構光條紋的過程中棋盤格角點的影響,從而提高線結構光視覺傳感器的標定精度。
2 線結構光視覺傳感器的測量模型
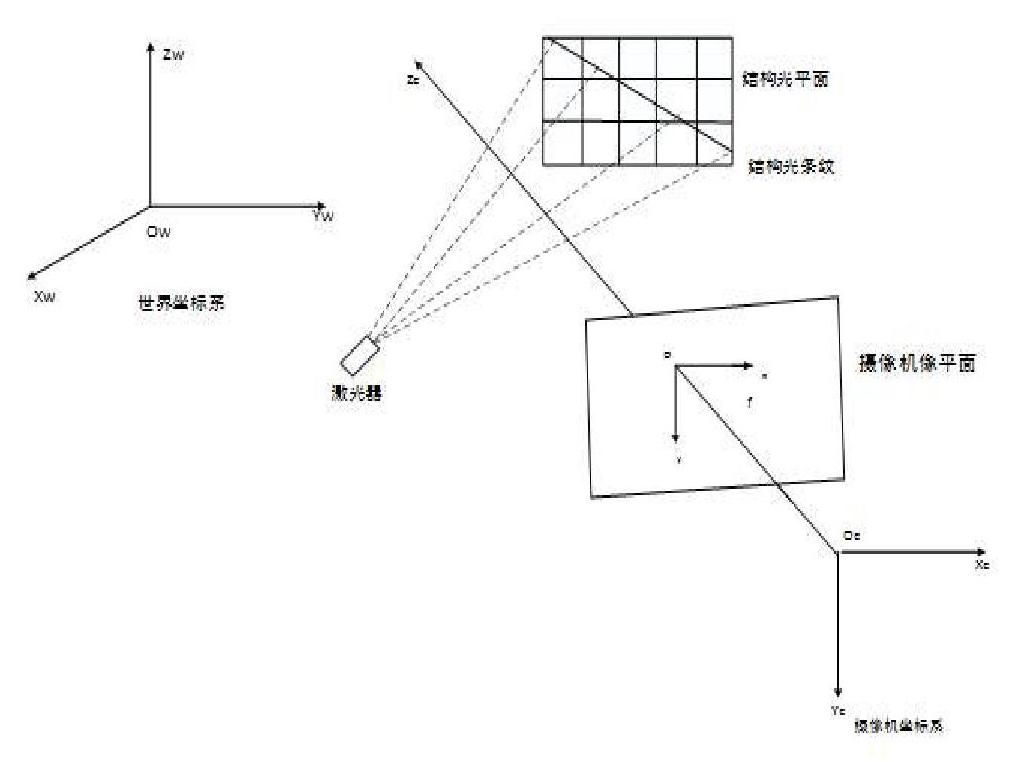
線結構光視覺傳感器的測量是基于光學三角法測量原理。如圖1所示,世界坐標系為[OWXWYWZW],攝像機坐標系為[OCXCYCZC],圖像坐標系為[OXY],像素坐標系為[OUV]。攝像機坐標系的[XC]軸和[YC]軸分別平行于圖像坐標系的X軸和Y軸,Z軸與攝像機坐標系的主光軸([ZC]軸)重合。光學投射器將一定模式的線結構光投射于棋盤格靶標平面上,投射的結構光平面與靶標平面相交的部分形成結構光條紋。
通過以上計算可以求得標定點D的世界坐標,直線F1與靶標平面上平行直線E2,E3等相交,可以獲取多組標定點。由于在同一靶標平面上獲取的多組標定點在同一平面內,且至少三個不共線的標定點才能確定光平面,所以通過沿著光平面的方向(前后)移動靶標的位置,攝像機和激光器的位置不變。如圖4所示,靶標平面從π1移動到π2,可以獲得不共線的特征點。
4 標定實驗結果與分析
如圖3所示,光平面標定的過程中,標定點的獲取是重點和難點,由于結構光條紋F1和棋盤格在一個平面內,徐光佑提出的利用交比不變定理獲取標定點的方法拍攝光平面時,不利于提取棋盤格角點和結構光條紋。為了便于獲取棋盤格角點和結構光條紋,本文提出了一種新的方法:固定棋盤格位置不變,在棋盤格上貼上一張白紙,把結構光條紋投射到白紙上,如圖5所示。分別拍攝棋盤格和結構光,白紙的厚度忽略不計,此時結構光條紋和棋盤格可以看作在同一平面內。
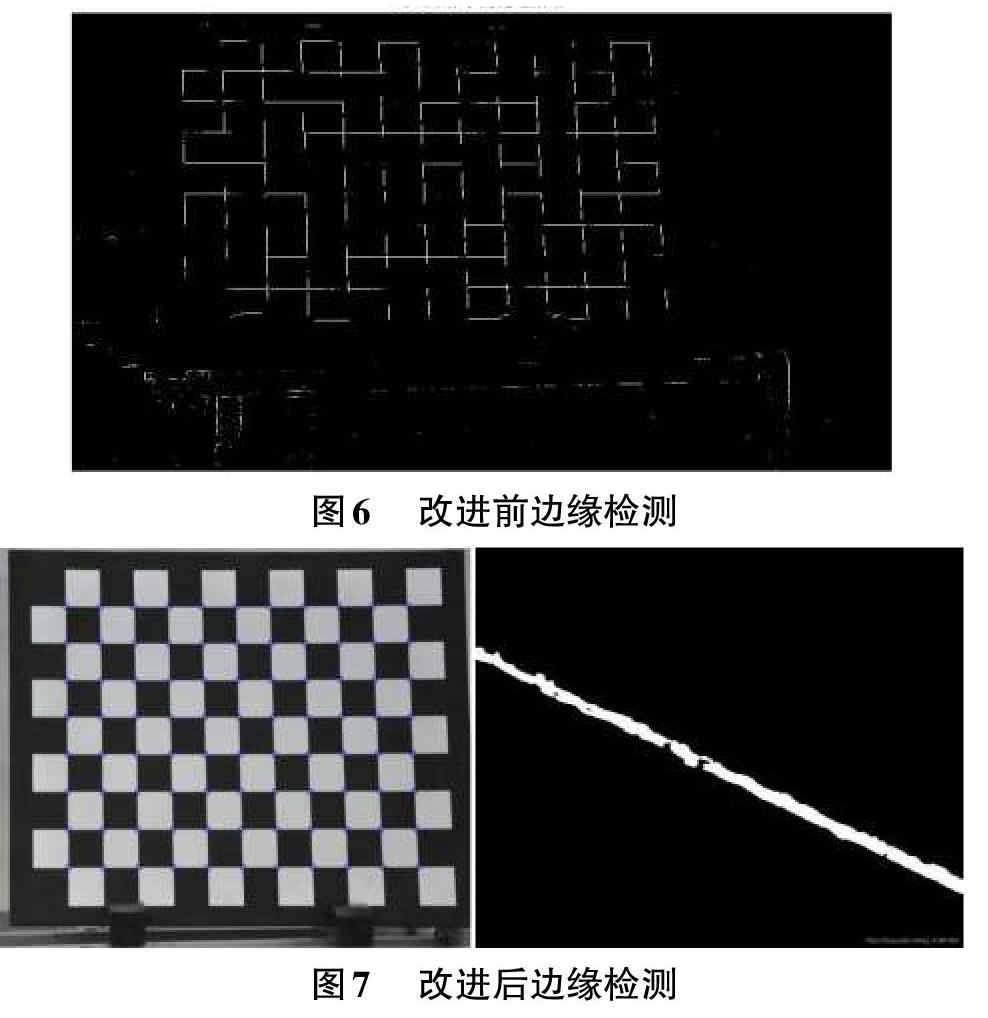
用兩種方法分別獲取結構光條紋,結果如圖6所示。
實驗結果分析:
在棋盤格上貼上一張厚度可以忽略不計的白紙,改進前和改進后,拍攝光平面提取光條紋的性質是一樣的,改進之后的方法更利于獲取棋盤格角點和光條紋。
參考文獻:
[1] 魏振忠,長廣軍,徐園.一種基于先結構光的視覺傳感器標定方法[J].機械工業學報,2015,2(2):210-213.
[2] 鄧文怡,呂乃.三未測量技術中采用反向傳播神經網絡法[J].華中理工大學報,19909,27(1):78-80.
[3] 徐光祐,劉立峰,曾建超,等.一種新的基于機構光三維視覺系統標定方法[J].計算機學報,1995,18(6):73-86.
【通聯編輯:梁書】
