智能擦拭機器人
2020-03-26 09:34:30楊承坤
科學技術創新 2020年1期
關鍵詞:機械
楊承坤
(西南石油大學,四川 成都610500)
1 系統概述
本設計由機械結構、控制系統兩部分構成。
1.1 機械結構概述
該機器人主要由全向輪底盤、升降機構、機械擦手、機械抓手、水箱清洗機組成。

圖1 整體機構三維圖
1.2 控制系統概述
本系統采用32 位ARM 內核控制器和博通BCM 處理器組成一個雙核的控制系統。采用全向輪底盤作為承重和移動機構;采用激光雷達構建室內地圖;超寬帶定位技術用以確定機器人在室內的位置;采用超聲波收發模塊實現實時避障;采用雙目視覺實現目標物體識別及定位;采用6 自由度機械手作為執行機構,實現物體的抓取和桌面的擦拭。
2 機械結構設計
2.1 底盤
機器人采用帶有全向輪的底盤,底盤上包括MD60 行星減速電機、軸承電機支座、全向輪、鋁型材等。
2.2 升降機構
機器人的升降機構由鋁型材、滑軌、滑塊、同步帶、同步帶輪、步進電機、支撐板等組成。鋁型材作為升降機構的支架,在機器人前方的鋁型材支架兩側安裝滑軌,支撐板左右兩(轉下頁)側與滑塊進行連接,其后側與同步帶進行連接。通過控制步進電機轉動,同步帶帶動支撐板上升或下降。

圖2
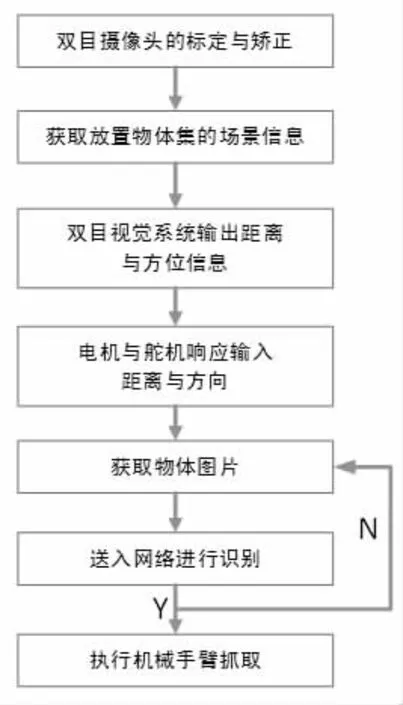
圖3 目標物體的定位及抓取流程圖
2.3 機械擦手與抓手
采用6 自由度的機械擦手和機械抓手,實現不同平面的擦拭與不同物體的抓取。機械擦手由舵機、連接桿、擦拭頭、噴水裝置組成。使用時機械擦手會自動識別擦拭平面,先對待擦拭的平面進行噴水處理,然后進行擦拭,最后再進行清洗擦拭。機械抓手由舵機、連接桿、抓手組成。使用時通過控制機械抓手自動定位待抓物品并移動到其位置處,實現抓取。
3 控制系統設計(圖2)
3.1 底盤控制
底盤內置速度位置PID 控制器、MD60 行星減速電機、500線光電編碼器。控制器輸出PWM脈沖信號對電機進行控制并接收編碼器脈沖以實時改變底盤的運動速度和方向。
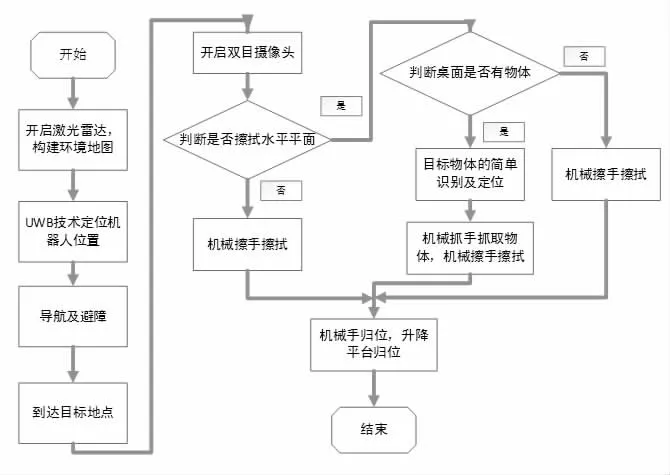
圖4 控制系統軟件實現流程圖
3.2 室內導航與避障
此方法首先使用EAILIDAR 激光雷達掃描室內環境,用采集到的數據擬合出室內環境輪廓圖[1];其次利用DW1000 超寬帶芯片實現超寬帶技術確定機器人的室內位置[2];然后主控處理器結合目的地信息、室內環境信息和機器人位置信息,規劃出機器人的行進路線;最后結合超聲波測距模塊進行防碰撞檢測和路線偏差修正,以實現實時導航和避障的功能。
3.3 目標物體的定位及抓取
使用雙目攝像頭采集信息,實現對目標物體的識別及定位,根據獲得的距離信息和方向信息指引小車移動到特定物體的正前方,并對機械抓手進行控制,實現抓取。
3.4 控制流程圖(圖3、4)
4 結論
本設計實現的智能擦拭機器人可自動擦拭桌面、櫥窗等水平或垂直平面,能自動識別并抓取物品,且整體機構簡明、實現容易、成本造價相對較低,擁有良好的市場前景與改進空間。
猜你喜歡
機械工程材料(2022年10期)2022-11-21 12:08:44
小學科學(學生版)(2021年9期)2021-11-02 05:26:46
電腦報(2020年35期)2020-09-17 13:25:53
當代工人(2020年8期)2020-05-25 09:07:38
電腦報(2019年40期)2019-09-10 07:22:44
建材發展導向(2019年13期)2019-08-24 06:37:40
電子制作(2018年14期)2018-08-21 01:38:14
小溪流(畫刊)(2017年12期)2018-01-10 16:07:29
筑路機械與施工機械化(2017年6期)2017-07-10 11:54:50
科技知識動漫(2016年8期)2016-07-29 20:40:09