新型高效智能便攜式梨果采摘裝置的研制
2020-03-26 11:53:50衢州職業技術學院王勝巫少龍周明安劉文軍
河北農機 2020年2期
衢州職業技術學院 王勝 巫少龍 周明安 劉文軍
引言
目前對于智能控制技術、嵌入式控制技術、計算機虛擬仿真技術等應用于農業生產中的起步還稍晚,但是通過近幾年行內專家學者的研究與創新取得了一定的可借鑒的技術標準及實施方案,部分研究成果已經達到國內較為先進水平,但也存在一些不全面性和創新性不足的問題,這些研究為本項目的開展提供了保證和借鑒。
南京工業大學孫承平等[1]設計了采摘機器人視覺測量與避障控制系統。該系統具有較強的識別功能,但未能在模擬實踐中進行系統的實驗,實用性和推廣性有待考量。華南農業大學熊俊濤等[2]研究了荔枝、柑橘的視覺識別定位方法,以及機械手的行為控制方法,進行了荔枝、柑橘的采摘作業試驗,該款機器人制作成本高、且主要針對的是以串型水果為主的采摘,品種具有局限性。齊齊哈爾大學蔣超等[3]研究了基于傳感器的自動識別水果采摘機。適用于大多數果園采摘,能高效、快速地采摘水果,極大程度上減少了勞動力,提高了采摘效率。東北林業大學孫雪等[4]提出了一種球形水果采摘機器人的總體結構方案,該機器人的主要特點是能夠適應惡劣的地面環境、對果實傷害小、采摘效率高,能夠為進一步研究開發實用型水果采摘機器人提供基礎。南京農業大學董芒等[5]設計了一種輪式智能移動采摘平臺,設計的轉向機構和防撞梁機構,該移動平臺結構合理,強度和剛度較高,運動精度高,符合實際工作要求。廣東海洋大學曾嘉煜等[6]一種實用性高的無線遙控式高果采摘器。通過對已有的水果采摘器結構原理和使用步驟進行分析研究,結合紅外遙控原理,由微型直流電動機驅動,采用可動機械爪結構,同時手柄部分采用可調伸縮桿結構,對高果采摘器結構進行合理設計。南京航空航天大學朱霞等[7]設計了一種用于智能水果采摘機器人的識別系統。該識別系統為后期果實的采摘提供了比較精確的參考。
目前國內的果蔬采摘機器人很大一部分是利用機械線纜機構方式驅動,在抓取果實應用中使用氣動方式,鮮見有利用高低自由伸縮及可分離采摘機械臂的機構,結合影像識別技術定位果實,完成懸掛果的無損采摘。因此,一種便攜式、無線遙感控制的高效梨果采摘裝置的研制和應用,將降低懸掛果采摘作業的難度,促進我國農業采摘自動化水平的發展。
1 裝置研制技術分析
1.1 自由伸縮可分離機械臂的運動學、動力學分析及穩定性控制
設計便攜式智能高效的懸掛果采摘裝置。需要經過試驗仿真和實際調試,最終將實物制作大致分為:機械手裝置、采摘部件、嵌入式控制模塊、多視覺傳感器模塊、位置傳感器模塊等五大核心部分。通過UG 軟件的三維設計分析功能,利用虛擬樣機的仿真設計及動靜力學分析技術,實現穩定的采摘動作路徑規劃及動力平衡,確保采摘過程的穩定性。
1.2 機械手與末端執行機構分析及平穩性存在的關鍵參數
設計出用于采摘智能控制技術的整體裝置結構,研究嵌入式模塊控制的優化構建與采摘穩定性的驗證技術。建立懸掛果采摘裝置的實際制作及優化的實驗方法與驗證手段。從智能制造技術制作完成樣機的運行穩定性、連接桿與連接板的結合點處的速度及位移的變化曲線、從運動的穩定性及高效性角度出發,探索新型懸掛果采摘裝置的切除執行機構及采摘穩定性的因素。
1.3 采摘裝置末端切除執行機構分析及視覺定位方法
對末端的切除采摘機構,采用可分離高低兩用的原則,設計出一種結構更為簡單、通用性更強的末端執行器。通過較少的驅動器驅動,依靠無線控制模塊和機械執行機構實現正常工作。該采摘末端執行器能根據橘樹樹干、枝葉和果實的實際情況進行調整,實現期望的抓取功能,易于控制,并能實現無損采摘。主要包括手持采摘機構的設計、力學分析、控制過程分析、抓取試驗等。
1.4 智能高清影像定位識別技術的無線傳感控制優化理論的實現
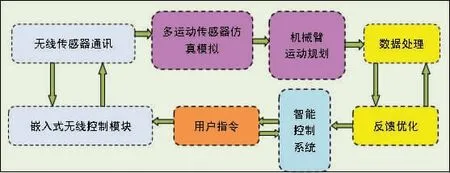
圖1 智能水果采摘裝置原理圖
探索基于高清影像識別定位的嵌入式無線控制模塊感知方法,檢測智能水果采摘裝置實現農業生產過程的動態優化技術等。初步完成相應裝置的多運動傳感器的設置及仿真,進行運動方案的規劃,結合實驗數據采集仿真分析驗證,開展試驗采摘實踐,并實現懸掛果類智能便攜式采摘裝置的高效穩定的農業生產過程。
1.5 建立采摘機械裝置的虛擬樣機初期設計模型

圖2 采摘裝置虛擬樣機初期設計圖
如圖2 所示,多傳感器融合了多品種高果采摘裝置,設計有視覺傳感器、位移傳感器、顏色傳感器等多傳感器控制的機械裝置,實現多品種多形狀水果的定位并采摘。在虛擬仿真設計中,采用機身穩定裝置對整體裝置進行仿真實驗,并根據仿真實驗數據及結果,合理編排傳感器安裝的位置及固定方式,采用移動式機身穩定裝置設計,使得整個裝置更加穩定,充分地融合嵌入式控制模塊,提高高空水果采摘的智能化及精準性。設計便攜式可分離的柔性可調節采摘剪切器,實現懸掛果的全地形高效智能采摘效果。
2 結論
便攜智能高效采摘裝置是對水果智能采摘機研制的技術革新,所研制的裝置可推廣到各個行業,滿足農戶及家庭合作社對采摘機的需求,服務農業具體工作。分析驗證表明,裝置能實現手持電動剪切部件的采摘效果,效率高、靈活、操控性非常強,達到高效率采摘低空的懸掛果。設計的無線遙控裝置控制區的無線傳感按鈕,模擬實現剪切裝置的快速剪切動作,達到遠距離、高空控制的高效率水果的采摘。能夠實現精準采摘規定尺寸范圍內的各類品種球形水果,實現高低空水果的柔性化采摘的效果。
猜你喜歡
民用飛機設計與研究(2020年4期)2021-01-21 09:15:02
文苑(2018年23期)2018-12-14 01:06:06
電子制作(2018年18期)2018-11-14 01:48:24
文苑(2018年19期)2018-11-09 01:30:14
文苑(2018年17期)2018-11-09 01:29:26
文苑(2018年21期)2018-11-09 01:22:32
鐵道通信信號(2018年2期)2018-04-18 12:18:23
電鍍與環保(2016年3期)2017-01-20 08:15:32
山東工業技術(2016年15期)2016-12-01 05:31:22
單片機與嵌入式系統應用(2014年9期)2014-03-11 15:35:13
