基于多體系統(tǒng)傳遞矩陣法的舵系統(tǒng)振動(dòng)特性分析
2020-03-26 03:11:18陳東陽(yáng)肖清謝俊超朱衛(wèi)軍芮筱亭
哈爾濱工程大學(xué)學(xué)報(bào) 2020年2期
陳東陽(yáng), 肖清, 謝俊超, 朱衛(wèi)軍, 芮筱亭
(1.揚(yáng)州大學(xué) 電氣與能源動(dòng)力工程學(xué)院,江蘇 揚(yáng)州 225100; 2.中國(guó)艦船研究設(shè)計(jì)中心,湖北 武漢 430064; 3.南京理工大學(xué) 發(fā)射動(dòng)力學(xué)研究所,江蘇 南京 210094)
大多數(shù)工程機(jī)械系統(tǒng)在一定程度上都存在振動(dòng)問(wèn)題,它們的結(jié)構(gòu)設(shè)計(jì)通常需要考慮其振動(dòng)特性[1]。為了提高水下航行器舵系統(tǒng)的結(jié)構(gòu)性能,更好的計(jì)算出舵系統(tǒng)的水彈性,必須準(zhǔn)確計(jì)算出舵系統(tǒng)的固有頻率和振型。在工程問(wèn)題中,如果不能準(zhǔn)確計(jì)算結(jié)構(gòu)的振型和頻率,很難得到一個(gè)具有良好性能的結(jié)構(gòu)系統(tǒng)并且很難進(jìn)行下一步的振動(dòng)控制分析[2]。
工程實(shí)際中,如水翼艇的水翼,潛艇中的升降舵、艉舵等船舶構(gòu)件作為復(fù)雜的多剛?cè)狍w動(dòng)力學(xué)系統(tǒng),結(jié)構(gòu)參數(shù)設(shè)計(jì)不當(dāng)時(shí),在流場(chǎng)中高速運(yùn)動(dòng)會(huì)產(chǎn)生顫振現(xiàn)象導(dǎo)致結(jié)構(gòu)破壞,或發(fā)生持續(xù)的弱振動(dòng)現(xiàn)象誘發(fā)水噪聲,降低水下航行器的隱蔽性[3-5]。而對(duì)這些結(jié)構(gòu)系統(tǒng)進(jìn)行流固耦合仿真的第一步是高效準(zhǔn)確的獲取結(jié)構(gòu)系統(tǒng)的振動(dòng)特性。通常力學(xué)方法在計(jì)算多剛?cè)狁詈象w系統(tǒng)振動(dòng)特性時(shí),需要建立系統(tǒng)總體動(dòng)力學(xué)方程,不僅需要解決涉及的矩陣階次高計(jì)算工作量大的困難,還可能面臨計(jì)算“病態(tài)”問(wèn)題[6]。尋求水下航行器舵系統(tǒng)等復(fù)雜多剛?cè)狁詈象w系統(tǒng)動(dòng)力學(xué)快速建模和振動(dòng)特性快速計(jì)算方法,是目前工程上解決大系統(tǒng)的流固耦合問(wèn)題的迫切需要。芮筱亭等[7-10]建立了多體系統(tǒng)動(dòng)力學(xué)新方法——多體系統(tǒng)傳遞矩陣法(transfer matrix method for multibody system,MSTMM)。該方法先后實(shí)現(xiàn)了線性多體系統(tǒng)的固有振動(dòng)特性和動(dòng)力響應(yīng)及非線性、時(shí)變、大運(yùn)動(dòng)、受控、一般多體系統(tǒng)動(dòng)力學(xué)研究,無(wú)需系統(tǒng)總體動(dòng)力學(xué)方程,程式化程度高、系統(tǒng)矩陣階次低、可以實(shí)現(xiàn)復(fù)雜系統(tǒng)的快速建模與快速計(jì)算[11-13]。為水下航行器舵系統(tǒng)動(dòng)力學(xué)快速建模和振動(dòng)特性計(jì)算提供了基礎(chǔ)。
對(duì)于復(fù)雜多剛?cè)狍w的水下航行器舵系統(tǒng),部分學(xué)者采用有限元法將舵系統(tǒng)的舵葉處理成柔性系統(tǒng),將舵系統(tǒng)處理為單個(gè)柔性舵葉加一根扭簧的簡(jiǎn)化模型,計(jì)算出系統(tǒng)的振動(dòng)模態(tài),再結(jié)合勢(shì)流理論或CFD理論,計(jì)算水翼系統(tǒng)的水彈性問(wèn)題[14-15]。但很少有人從整個(gè)舵系統(tǒng)的角度出發(fā),建立整個(gè)舵系統(tǒng)的動(dòng)力學(xué)模型,考慮各部件的結(jié)構(gòu)參數(shù)以及連接剛度對(duì)系統(tǒng)振動(dòng)特性的影響。且采用有限元法對(duì)簡(jiǎn)化系統(tǒng)進(jìn)行建模,依然單元數(shù)過(guò)多、矩陣階次高、計(jì)算效率低且理論背景復(fù)雜、推導(dǎo)過(guò)程繁瑣。本文基于MSTMM對(duì)整個(gè)舵系統(tǒng)動(dòng)力學(xué)進(jìn)行快速建模和仿真并與基于有限元法(finite element method, FEM)的ANSYS仿真軟件計(jì)算結(jié)果進(jìn)行對(duì)比分析。
1 水下航行器舵系統(tǒng)動(dòng)力學(xué)建模
1.1 動(dòng)力學(xué)模型
水下航行器的舵系統(tǒng)是一個(gè)復(fù)雜的多剛?cè)狍w系統(tǒng),如圖1所示。舵系統(tǒng)主要由舵葉、舵軸、舵柄、傳動(dòng)桿、拉桿、球鉸、柱鉸、液壓系統(tǒng)組成。該舵系統(tǒng)稱為圍殼舵,其軸承外表面、導(dǎo)向裝置、密封裝置、液壓缸與該航行器的圍殼直接相連,固定在水下航行器上。導(dǎo)向拉桿上下運(yùn)動(dòng)帶動(dòng)舵柄轉(zhuǎn)動(dòng),舵柄與舵軸固結(jié)在一起,因此也帶動(dòng)舵軸轉(zhuǎn)動(dòng)。傳動(dòng)桿穿過(guò)密封裝置,只能上下運(yùn)動(dòng)。在軸承的兩端以及舵葉之間有定位環(huán)裝置,以確保舵軸沒(méi)有左右串動(dòng)。

圖1 水下航行器舵系統(tǒng)Fig.1 The hydroplanes system of an underwater vehicle
由于水下航行器舵系統(tǒng)的舵葉是位于水下,舵葉表面有細(xì)孔,水流可以通過(guò)細(xì)孔流進(jìn)流出,假設(shè)舵葉內(nèi)部的水為附加質(zhì)量,舵葉應(yīng)變很小,應(yīng)力應(yīng)變?yōu)榫€性關(guān)系;舵系統(tǒng)的軸承座、導(dǎo)向裝置、密封裝置、液壓缸都是用螺栓連接在水下航行器上。水下航行器質(zhì)量遠(yuǎn)遠(yuǎn)大于舵系統(tǒng),因此假設(shè)水下航行器為固定邊界。螺栓連接剛度用彈簧表示,舵系統(tǒng)的結(jié)構(gòu)示意圖如圖2(a)所示。考慮舵系統(tǒng)每個(gè)部件之間的相互作用,基于MSTMM對(duì)整個(gè)舵系統(tǒng)進(jìn)行建模,動(dòng)力學(xué)模型如圖2(b)所示。
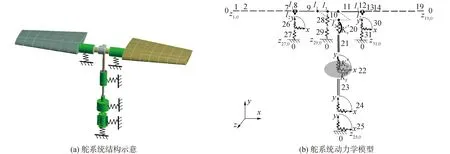
圖2 舵系統(tǒng)結(jié)構(gòu)示意及動(dòng)力學(xué)模型Fig.2 The hydroplanes system and its dynamic model
在圖2(b)中,舵葉處理為7段考慮軸向振動(dòng)的、不同結(jié)構(gòu)參數(shù)的彎扭耦合梁(元件1~7,13~19);柱鉸(元件20)處理為鉸元件;球鉸以及考慮導(dǎo)向裝置與水下航行器的連接剛度,因此在球鉸元件(元件22)中添加了x方向的彈簧剛度;舵軸(元件9、11)處理為可以考慮橫向、軸向振動(dòng)以及扭轉(zhuǎn)振動(dòng)的非耦合梁;軸承與軸承套之間的接觸剛度以及定位環(huán)與舵葉之間的接觸剛度用彈簧鉸表示(元件26、28、30);軸承座與水下航行器的連接剛度用彈簧表示(元件27、29、31);拉桿處理為可以考慮x軸方向、軸向振動(dòng)的非耦合梁(元件21);傳動(dòng)桿在密封裝置中只能上下運(yùn)動(dòng),因此處理為桿元件(元件23);舵柄處理為剛體(元件10);液壓缸提供的是液壓彈簧剛度,同時(shí)考慮到密封裝置與水下航行器之間的連接剛度,液壓缸處理為一個(gè)彈簧鉸(元件24);液壓缸與水下航行器之間的連接剛度處理為一個(gè)彈簧鉸(元件25);傳遞方向是從左端點(diǎn)和下端點(diǎn)到右端點(diǎn),所有元件的狀態(tài)矢量統(tǒng)一為[X,Y,Θz,Mz,Qx,Qy,Θx,Mx]T。
基于多體系統(tǒng)傳遞矩陣法[7-8,16],建立水下航行器舵系統(tǒng)振動(dòng)特性快速計(jì)算方法,以實(shí)現(xiàn)對(duì)水下航行器舵系統(tǒng)的固有振動(dòng)特性的準(zhǔn)確分析。
1.2 傳遞方程推導(dǎo)
根據(jù)多體系統(tǒng)傳遞矩陣法對(duì)系統(tǒng)拓?fù)浣Y(jié)構(gòu)的定義[7,16],推導(dǎo)舵系統(tǒng)的傳遞方程:
(1)
式中:
(2)
令:
(3)
因此,式(1)可以寫為:
-Z19,0+T1-19Z1,0+T27-19Z27,0+
T29-19Z29,0+T25-19Z25,0+T31-19Z31,0=0
(4)
式中Tj-19的下標(biāo)j-19表示傳遞方向中從該j稍元件到根元件的傳遞分支。
根據(jù)文獻(xiàn)[7,16],舵系統(tǒng)的幾何方程為:
(5)
(6)
(7)
(8)
式中:Gk-l的下標(biāo)k-l表示幾何方程從該元件k到元件l的傳遞分支。
1.3 舵系統(tǒng)各部件的傳遞矩陣
常用的梁、桿、剛體、彈簧鉸等的傳遞矩陣可以查閱文獻(xiàn)[7]得到。
根據(jù)舵葉的變形特性,舵葉一般可以簡(jiǎn)化為一根彎扭耦合梁。圖2(a)中的舵葉為非等截面水翼,可以將舵葉分成多段等截面不同結(jié)構(gòu)參數(shù)分布的彎扭耦合梁。文獻(xiàn)[17]已經(jīng)推導(dǎo)了彎扭耦合梁的傳遞矩陣,并給出了獲取舵葉結(jié)構(gòu)參數(shù)的方法及動(dòng)力學(xué)模型中所用的主要參數(shù)。從圖1可以看到,由于舵葉是固定在舵軸上,導(dǎo)向拉桿連接的球鉸,因此實(shí)際模型中,加入了定位環(huán)來(lái)限制舵軸的左右竄動(dòng)。在圖2(b)的動(dòng)力學(xué)模型中,將定位環(huán)處理為彈簧剛度,因此模型中的舵軸、舵葉、導(dǎo)向拉桿存在x方向的自由度。令文獻(xiàn)[17]中的彎扭耦合梁的傳遞矩陣為DCB=B(1)·B-1(0),那么考慮彎扭耦合梁的軸向振動(dòng),得到可以考慮彎曲扭轉(zhuǎn)耦合振動(dòng)、軸向振動(dòng)的耦合梁傳遞矩陣:
(9)

剛體的傳遞矩陣為:

(10)
(11)
(12)
式中:Jxz、Jxx、Jzz為剛體的質(zhì)量慣性矩;(c1,c2,c3)為質(zhì)心位置;(a1,a2,a3)為對(duì)應(yīng)U10,I2的輸入點(diǎn)坐標(biāo);(d1,d2,d3)為對(duì)應(yīng)U10,I3的輸入點(diǎn)坐標(biāo);(b1,b2,b3)為輸出點(diǎn)處的坐標(biāo)。以U10,I1對(duì)應(yīng)的輸入點(diǎn)位置為原點(diǎn)。
虛擬剛體的傳遞矩陣為:
(13)
(14)
彈簧的傳遞矩陣為:
U27=U28=U29=U31=
(15)
U25=U26=U30=
(16)
(17)
式中:Kx、Ky分別為x和y方向的彈簧剛度;Kh為液壓等效彈簧剛度。
柱鉸的傳遞矩陣為:
(18)
式中K′x為繞x軸的扭轉(zhuǎn)剛度。
球鉸的傳遞矩陣為:
(19)
式中K′z為繞z軸的扭轉(zhuǎn)剛度。
彎扭耦合梁的傳遞矩陣見(jiàn)文獻(xiàn)[17],即:
(20)
多體系統(tǒng)的傳遞矩陣法[7]的矩陣庫(kù)中包含具有橫向振動(dòng)、扭轉(zhuǎn)振動(dòng)的非耦合梁傳遞矩陣。根據(jù)MSTMM矩陣推導(dǎo)方法可以得到非耦合梁模型一的傳遞矩陣為:
(21)
式中:
(22)
l和A分別是梁的長(zhǎng)度和截面積。
因此,有:
U9=U11=UUB1
(23)
根據(jù)MSTMM矩陣庫(kù)中的軸向振動(dòng)桿和橫向振動(dòng)梁的傳遞矩陣形式可以得到考慮軸向和橫向振動(dòng)的平面振動(dòng)梁的傳遞矩陣U1為:
(24)
采用方向余弦矩陣將平面振動(dòng)梁轉(zhuǎn)動(dòng)90°,轉(zhuǎn)換矩陣R為:
(25)
轉(zhuǎn)換后的平面振動(dòng)梁的傳遞矩陣U2為:
U2=RTU1R
(26)
根據(jù)狀態(tài)矢量的數(shù)量,擴(kuò)展對(duì)應(yīng)的傳遞矩陣。因此,非耦合梁模型二傳遞矩陣UUB2為:
(27)
因此,有:
U21=UUB2
(28)
桿元件的傳遞矩陣Urod為:
(29)
因此,
U23=Urod
(30)
另外幾何矩陣,
H8,I1=H8,I2=H12,I1=H12,I2=
(31)
(32)

(33)
(34)
1.4 舵系統(tǒng)特征值求解
根據(jù)式(1)~(5)可以寫出舵系統(tǒng)總傳遞方程:
Uall|24×48Zall|48×1=0
(35)
式中:

(36)
邊界條件為:
(37)
求解式(27)即可求出舵系統(tǒng)固有頻率,然后可得到對(duì)應(yīng)于固有頻率ωk的系統(tǒng)邊界點(diǎn)狀態(tài)矢量Zall,進(jìn)而通過(guò)元件傳遞方程得到系統(tǒng)全部聯(lián)接點(diǎn)的狀態(tài)矢量,即為系統(tǒng)的振型。
舵系統(tǒng)的彎曲剛度、扭轉(zhuǎn)剛度等參數(shù)一般可以由實(shí)驗(yàn)獲得,本文主要通過(guò)前期工作的有限元靜力學(xué)分析方法獲得[17]。由于本文舵系統(tǒng)振動(dòng)特性計(jì)算服務(wù)于流固耦合計(jì)算,因此只關(guān)注前幾階與舵葉振動(dòng)特性相關(guān)的模態(tài),不研究舵系統(tǒng)的較高階模態(tài)。
2 水下航行器舵系統(tǒng)振動(dòng)特性分析
舵系統(tǒng)在水下運(yùn)作時(shí),舵葉中是充滿水的,因此需要計(jì)算舵葉中充滿水情況下的舵系統(tǒng)振動(dòng)特性,將舵葉中的水處理為附加質(zhì)量進(jìn)行計(jì)算。求解特征方程,得到舵葉(舵機(jī)液壓彈簧剛度Kh=4×108N/m)內(nèi)部不含水和充滿水2種情況下的舵系統(tǒng)的圓頻率值如圖3所示。
圖3采用的是文獻(xiàn)[13]的搜根方法,圖3(a)的橫坐標(biāo)為圓頻率,縱坐標(biāo)表示|Δ|值的大小,當(dāng)|Δ|值接近于0時(shí)即可以求出圓頻率。圖中顯示的豎線即搜根過(guò)程,每條豎線下對(duì)應(yīng)的就是該階模態(tài)的圓頻率。本文還采用ANSYS軟件對(duì)該舵系統(tǒng)進(jìn)行建模,限于篇幅,ANSYS軟件的設(shè)置細(xì)節(jié)不在此詳述。圖4為采用ANSYS軟件計(jì)算得到的舵系統(tǒng)前四階振動(dòng)模態(tài)(舵葉內(nèi)部充滿水情況),單核CPU,采用ANSYS計(jì)算一組舵系統(tǒng)振動(dòng)模態(tài)需要38.5 min左右。
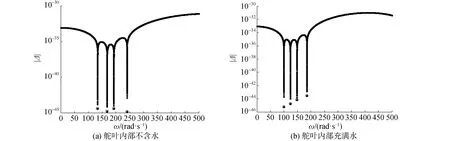
圖3 圓頻率計(jì)算結(jié)果Fig.3 Calculation results of circular frequency

圖4 舵系統(tǒng)模態(tài)仿真結(jié)果(ANSYS)Fig.4 Modal simulation results of the hydroplane system(ANSYS)
從表1可以看出,基于MSTMM計(jì)算出的頻率與ANSYS有限元軟件計(jì)算結(jié)果很接近。可以看出,在考慮舵葉內(nèi)部充滿水的條件下,相較于舵葉內(nèi)部沒(méi)有水的情況,舵系統(tǒng)的頻率值有所減小。

表1 基于MSTMM和FEM舵系統(tǒng)頻率計(jì)算結(jié)果對(duì)比Table 1 Comparison of MSTMM and FEM for the determination of the natural frequencies of the hydroplanes system Hz
如圖5所示,基于MSTMM的舵系統(tǒng)(內(nèi)部充滿水情況)模態(tài)計(jì)算結(jié)果表明,舵系統(tǒng)前四階振型在X方向上沒(méi)有任何振動(dòng)。基于MSTMM的舵系統(tǒng)(舵葉內(nèi)部充滿水)的Y,Θx方向上的振型如圖6所示。同等計(jì)算條件下,計(jì)算一組模態(tài),采用 MSTMM只需0.25 min左右,相比ANSYS軟件大大提高了計(jì)算效率。
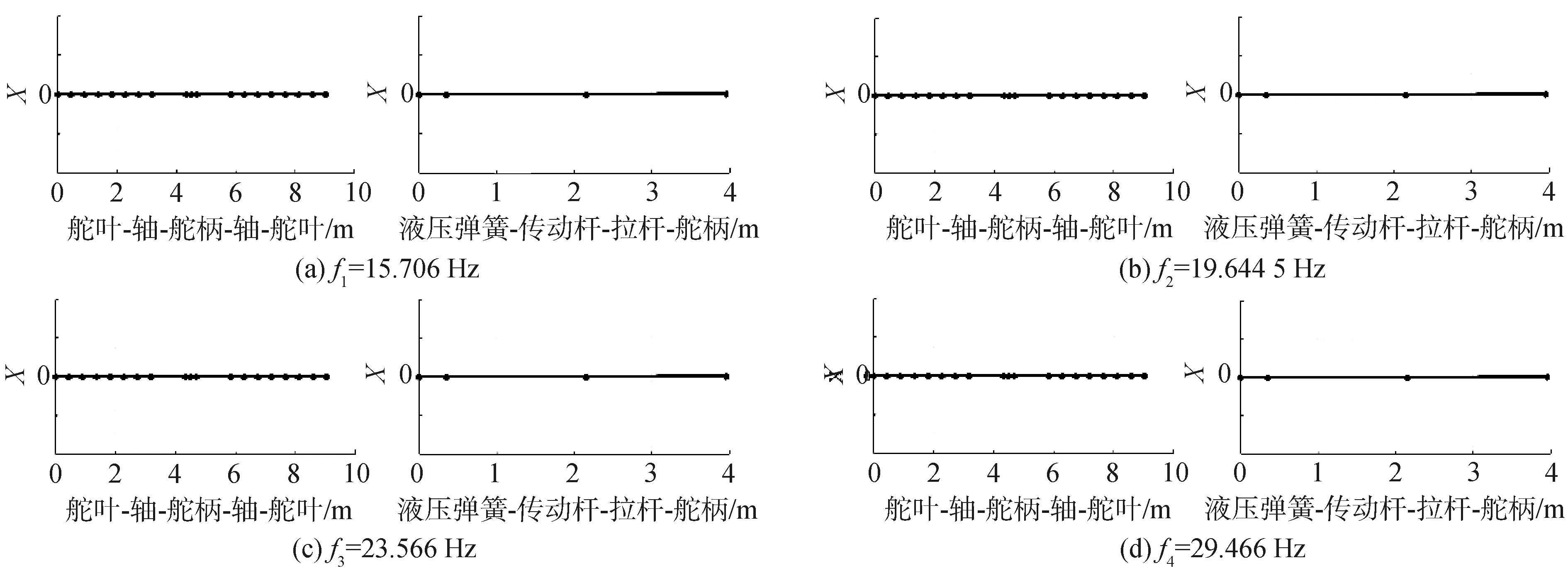
圖5 舵系統(tǒng)前四階X方向振動(dòng)(MSTMM)Fig.5 The first fourth x-direction modes of the hydroplane system (MSTMM)

圖6 舵系統(tǒng)前四階Y,Θx方向振型(MSTMM)Fig.6 The first fourth Y,Θx-direction modes of the hydroplane system (MSTMM)
從圖4~6中可以看出,MSTMM計(jì)算結(jié)果和ANSYS有限元軟件全模型仿真結(jié)果十分接近,說(shuō)明了本文方法的合理性和可行性。舵系統(tǒng)的第1、3階為對(duì)稱模態(tài),第2、4階為反對(duì)稱模態(tài)。從圖6可以看出,第2、4反對(duì)稱模態(tài)中看到,只有舵葉和舵軸這條線有振型,而液壓缸到舵柄這條線振型為0,說(shuō)明第2、4階模態(tài)是舵系統(tǒng)的局部模態(tài)。局部模態(tài)對(duì)系統(tǒng)的整體動(dòng)力學(xué)響應(yīng)的貢獻(xiàn)可以忽略。
基于MSTMM進(jìn)行舵系統(tǒng)動(dòng)力學(xué)特性計(jì)算,可以方便地改變舵系統(tǒng)中的每個(gè)部件的參數(shù),并且能快速計(jì)算出結(jié)果,研究這些參數(shù)對(duì)舵系統(tǒng)的振動(dòng)特性的影響。改變液壓等效彈簧剛度的大小,分別計(jì)算了舵葉內(nèi)部沒(méi)有水和充滿水2種情況下的舵葉振動(dòng)頻率,計(jì)算結(jié)果如圖7所示。增加液壓彈簧剛度可以增加系統(tǒng)第1、3階的頻率,相當(dāng)于增加了操縱系統(tǒng)的等效扭轉(zhuǎn)剛度,而增加液壓剛度對(duì)舵系統(tǒng)的第2、4階頻率沒(méi)有影響,這是由于第2、4階模態(tài)為局部模態(tài)造成的。
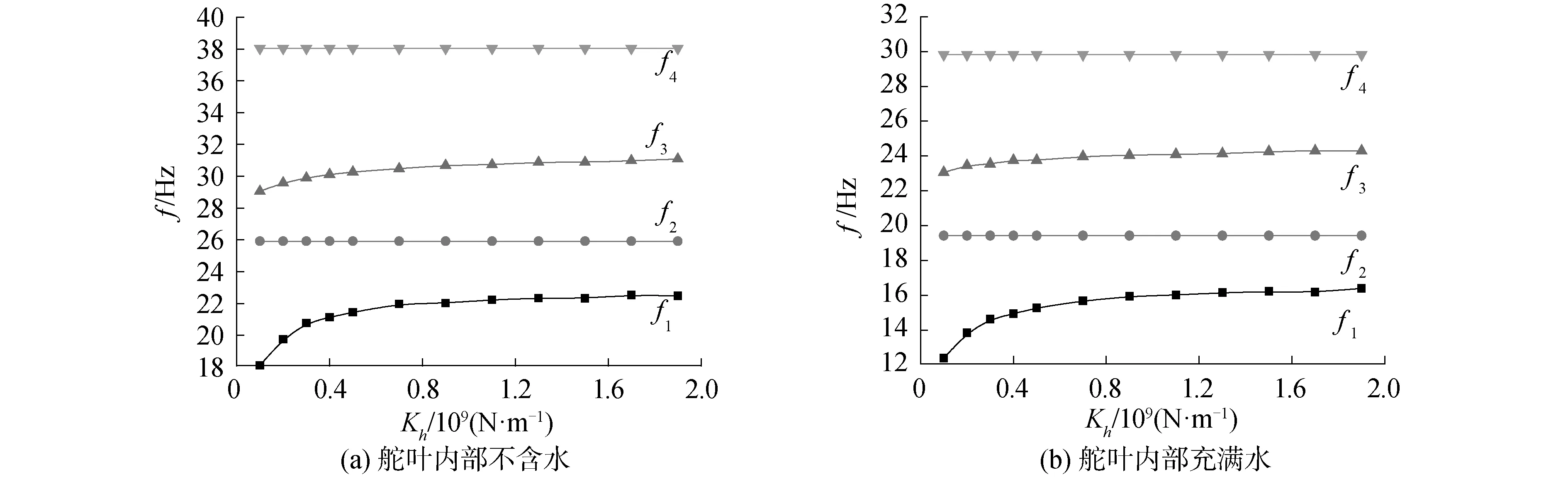
圖7 不同液壓剛度情況下的舵系統(tǒng)振動(dòng)頻率Fig.7 The hydroplanes system natural frequencies vs. hydraulic stiffness
3 結(jié)論
1) 基于MSTMM可以快速建立水下航行器舵系統(tǒng)的動(dòng)力學(xué)模型,且計(jì)算效率高。
2) 基于MSTMM可以方便的考慮系統(tǒng)各部件的結(jié)構(gòu)參數(shù)和連接剛度對(duì)系統(tǒng)振動(dòng)特性的影響,且可以直觀的計(jì)算出各振動(dòng)方向上的振型。
3) 舵系統(tǒng)的1、3階模態(tài)為對(duì)稱模態(tài),2、4階模態(tài)為反對(duì)稱模態(tài),且為局部模態(tài)。增加液壓彈簧剛度可以增加系統(tǒng)第1、3階的頻率,相當(dāng)于增加了操縱系統(tǒng)的等效扭轉(zhuǎn)剛度,可以抑制舵葉俯仰運(yùn)動(dòng)。
猜你喜歡
科學(xué)大眾(2023年17期)2023-10-26 07:39:14
工業(yè)設(shè)計(jì)(2022年8期)2022-09-09 07:43:20
軍民兩用技術(shù)與產(chǎn)品(2021年10期)2021-03-16 06:05:30
北京測(cè)繪(2020年12期)2020-12-29 01:33:58
天天愛(ài)科學(xué)(2020年6期)2020-09-10 07:22:44
數(shù)學(xué)物理學(xué)報(bào)(2017年6期)2018-01-22 02:26:40
家庭影院技術(shù)(2017年9期)2017-09-26 03:41:45
湖北經(jīng)濟(jì)學(xué)院學(xué)報(bào)·人文社科版(2015年8期)2015-12-29 05:53:07
上海電機(jī)學(xué)院學(xué)報(bào)(2015年4期)2015-02-28 14:30:00
計(jì)算物理(2014年2期)2014-03-11 17:01:44
