水下機(jī)器人試航速度的類物理數(shù)值方法預(yù)報(bào)
2020-03-26 03:11:18吳利紅張愛(ài)鋒李一平封錫盛王詩(shī)文
哈爾濱工程大學(xué)學(xué)報(bào) 2020年2期
關(guān)鍵詞:區(qū)域
吳利紅, 張愛(ài)鋒, 李一平, 封錫盛, 王詩(shī)文
(1. 大連海事大學(xué) 船舶與海洋工程學(xué)院,遼寧 大連 116026;2. 中國(guó)科學(xué)院沈陽(yáng)自動(dòng)化研究所 機(jī)器人學(xué)國(guó)家重點(diǎn)實(shí)驗(yàn)室,遼寧 沈陽(yáng) 110016)
預(yù)報(bào)水下機(jī)器人(autonomous underwater vehicle,AUV)定常航行的巡航速度和非定常運(yùn)動(dòng)的操縱性能不僅是評(píng)估其推進(jìn)系統(tǒng)性能的重要指標(biāo),還有助于提高AUV航程估計(jì),能量估算和減少定位誤差和AUV丟失的風(fēng)險(xiǎn)。采用類物理的數(shù)值方法進(jìn)行海洋載體操縱預(yù)報(bào)是數(shù)值模擬的目標(biāo)。此方法應(yīng)用真實(shí)模型模擬螺旋槳高速旋轉(zhuǎn),能反映船槳舵內(nèi)在作用機(jī)理,再現(xiàn)流場(chǎng)特征。但它具有模型復(fù)雜,網(wǎng)格尺度相差大,載體各部件相對(duì)運(yùn)動(dòng)復(fù)雜,高頻與低頻運(yùn)動(dòng)混合的模擬難點(diǎn)[1]。自20世紀(jì)90年代美國(guó)海軍提出這個(gè)概念以來(lái),直至2010年左右陸續(xù)有研究成果。如Chase等[1]、Pankajakshan等[2]、Poremba等[3]對(duì)潛艇自航運(yùn)動(dòng)進(jìn)行了數(shù)值模擬;Mofidi等[4]對(duì)集裝箱船KCS帶全附體槳舵的ZigZag操縱運(yùn)動(dòng)的模擬;Carrica等[5]對(duì)水面戰(zhàn)艦的隨浪橫甩運(yùn)動(dòng)進(jìn)行自航模擬;沈志榮[6]對(duì)水面船舶操縱運(yùn)動(dòng)進(jìn)行數(shù)值模擬。以上研究均采用動(dòng)態(tài)重疊網(wǎng)格法,在邊界移動(dòng)時(shí)無(wú)需網(wǎng)格更新,但須實(shí)時(shí)確定移動(dòng)邊界與背景網(wǎng)格的重疊區(qū)域,這是數(shù)值誤差的源頭[7]。而移動(dòng)網(wǎng)格法在邊界移動(dòng)時(shí)網(wǎng)格也隨著運(yùn)動(dòng),運(yùn)動(dòng)更符合拉格朗日描述法,但邊界移動(dòng)常導(dǎo)致復(fù)雜的網(wǎng)格運(yùn)動(dòng),從而引起網(wǎng)格畸變和網(wǎng)格質(zhì)量降低,影響數(shù)值計(jì)算精度。受此限制,移動(dòng)網(wǎng)格法主要應(yīng)用在二維物體的運(yùn)動(dòng):圓球的振動(dòng),魚類的擺鰭運(yùn)動(dòng)[8]和三維物體的有限區(qū)間或簡(jiǎn)單的運(yùn)動(dòng),如翼的偏轉(zhuǎn)[9],預(yù)定義AUV直航對(duì)接運(yùn)動(dòng)[10]。而本文則采用多塊動(dòng)態(tài)混合網(wǎng)格方法[11]解決移動(dòng)網(wǎng)格的網(wǎng)格畸變和數(shù)值精度差的問(wèn)題[12],實(shí)現(xiàn)AUV自航試驗(yàn)的數(shù)值模擬,獲得了AUV巡航速度預(yù)報(bào),再現(xiàn)了AUV自航過(guò)程非定常運(yùn)動(dòng)的航行特性。
1 水下機(jī)器人自航模型建立
AUV為改進(jìn)型REMUS AUV,L=1.7 m,D=0.191m[13]。具有橢球型艏、圓柱形平行中體和圓錐型艉。艉部有“十字”型舵翼以及一個(gè)MAU4-40,直徑d=0.156 m的螺旋槳。AUV艏、舯和艉3段以及舵翼采用結(jié)構(gòu)網(wǎng)格繪制,螺旋槳采用非結(jié)構(gòu)網(wǎng)格離散。圖1為AUV帶舵翼和螺旋槳的網(wǎng)格圖。大地坐標(biāo)系為oxyz,ox為AUV對(duì)稱軸,向艏為正(向前);oy垂直向上為正;oz指向右舷。
圖1 帶槳和舵的AUV網(wǎng)格模型Fig.1 Grid model of AUV appended propeller and rudders
圖2為AUV帶槳舵流域在對(duì)稱面上網(wǎng)格分區(qū),分區(qū)劃分是根據(jù)AUV的運(yùn)動(dòng)趨勢(shì)確定的。流域包含 6個(gè)分區(qū)。分區(qū)Ⅰ包含AUV和舵翼表面的四邊形網(wǎng)格以及近場(chǎng)邊界層區(qū)域的六面體結(jié)構(gòu)網(wǎng)格;分區(qū)Ⅱ包括螺旋槳表面的三角形網(wǎng)格以及螺旋槳擾動(dòng)子區(qū)域的四面體非結(jié)構(gòu)網(wǎng)格;分區(qū)Ⅲ包含AUV、螺旋槳和舵翼擾動(dòng)區(qū)域的六面體結(jié)構(gòu)網(wǎng)格;分區(qū)Ⅳ為AUV從艏部延伸到遠(yuǎn)場(chǎng)的航行區(qū)域網(wǎng)格,靠近艏部加密,遠(yuǎn)場(chǎng)較為稀疏,由六面體結(jié)構(gòu)網(wǎng)格構(gòu)成;分區(qū)Ⅴ為從AUV艉部延伸到遠(yuǎn)場(chǎng)的結(jié)構(gòu)網(wǎng)格區(qū)域,靠近AUV艉部為加密區(qū),遠(yuǎn)場(chǎng)為稀疏區(qū),也由六面體結(jié)構(gòu)網(wǎng)格構(gòu)成;外圍非結(jié)構(gòu)網(wǎng)格區(qū)域?yàn)榉謪^(qū)Ⅵ。
圖2 動(dòng)網(wǎng)格分區(qū)Fig.2 Dynamic meshing zones
在AUV自航推進(jìn)數(shù)值模擬過(guò)程中,網(wǎng)格運(yùn)動(dòng)區(qū)域限制在圖2的AUV直航窄條帶區(qū)域,這有利于局部擾動(dòng)區(qū)域梯度的捕捉。其中分區(qū)Ⅱ既有隨螺旋槳的旋轉(zhuǎn)運(yùn)動(dòng),又有隨AUV的直航運(yùn)動(dòng);分區(qū)Ⅰ和Ⅲ僅隨AUV作直航運(yùn)動(dòng);分區(qū)Ⅳ和Ⅴ分別為網(wǎng)格壓縮區(qū)域和拉伸區(qū)域,在分區(qū)Ⅳ的最前端為靜止壁面,采用動(dòng)態(tài)層方法對(duì)區(qū)域Ⅳ的最前端網(wǎng)格進(jìn)行壓縮合并,因此最前端為網(wǎng)格消亡區(qū)域;分區(qū)Ⅴ的最后端為動(dòng)態(tài)層網(wǎng)格的拉伸區(qū)域,為網(wǎng)格增長(zhǎng)區(qū)域。外圍區(qū)域Ⅵ為網(wǎng)格變形區(qū)。各個(gè)分區(qū)之間的連接采用非一致連接。這種多塊結(jié)構(gòu)網(wǎng)格和非結(jié)構(gòu)網(wǎng)格混合的網(wǎng)格構(gòu)成方法,以及采用動(dòng)態(tài)層網(wǎng)格更新方法,是借鑒了動(dòng)態(tài)重疊網(wǎng)格的子區(qū)域網(wǎng)格運(yùn)動(dòng)的思想,從網(wǎng)格構(gòu)建質(zhì)量、網(wǎng)格更新質(zhì)量和網(wǎng)格更新速度等方面著手,提高數(shù)值求解的速度和計(jì)算精度。
AUV自航推進(jìn)過(guò)程數(shù)值模擬中,AUV和螺旋槳之間力和速度的傳遞可以采用用戶自定義函數(shù)UDF(user defined function)進(jìn)行編寫,嵌入到程序中[14]:首先,AUV靜止,螺旋槳以恒定轉(zhuǎn)速旋轉(zhuǎn),產(chǎn)生推力,將此推力保存同時(shí)將推力傳遞給AUV;AUV讀取螺旋槳推力,同時(shí)實(shí)時(shí)求解URANS(unsteady reynolds averaged navier-stokes)方程,獲得AUV的阻力。AUV在推力和阻力的聯(lián)合作用下,通過(guò)在6-DOF方程加載推力和實(shí)時(shí)阻力,求解載體的加速度,并采用龍格庫(kù)塔積分獲得AUV實(shí)時(shí)速度V;此速度傳遞給螺旋槳,使AUV拖曳螺旋槳以V航速運(yùn)動(dòng);隨著AUV航行,AUV的尾流場(chǎng)更新,影響螺旋槳的進(jìn)流場(chǎng),螺旋槳在新的進(jìn)速和轉(zhuǎn)速下產(chǎn)生新的推力,重新記錄此推力并傳遞給AUV;AUV在阻力作用下,獲得新的航速,如此重復(fù),直到AUV的推力T與其航行阻力R接近平衡,速度曲線趨于穩(wěn)定,加速度接近為零。或?qū)Ρ群剿倥c多參考系坐標(biāo)[15](multiple frames of reference, MFR)的定常自航點(diǎn)航速,兩者誤差在5%內(nèi),也認(rèn)為達(dá)到自航點(diǎn)。記錄此時(shí)的推力、阻力、速度歷史數(shù)據(jù),保存和分析。
2 水下機(jī)器人自航數(shù)值結(jié)果與分析
2.1 受力和速度
AUV 以不同轉(zhuǎn)速?gòu)撵o止自航推進(jìn),最終會(huì)趨于勻速狀態(tài)。分別假定AUV以300、450、600 r/min 3種轉(zhuǎn)速航行,每種轉(zhuǎn)速自航一次,迭代步長(zhǎng)為螺旋槳旋轉(zhuǎn)1°對(duì)應(yīng)的時(shí)間,每個(gè)外循環(huán)包含內(nèi)循環(huán)20次,收斂精度為10-4。如圖3分別為轉(zhuǎn)速為300、450和600 r/min的自航螺旋槳推力和AUV阻力的歷史變化曲線。推力和阻力曲線在數(shù)值求解中有點(diǎn)振蕩,這是動(dòng)網(wǎng)格數(shù)值求解引起的不穩(wěn)定現(xiàn)象。阻力部分振蕩主要是由于載體低速巡航采用了和螺旋槳高速旋轉(zhuǎn)的小時(shí)間步引起的。隨著速度增加,推力減小,阻力增大,最終推力和阻力平衡,速度會(huì)趨于一個(gè)恒定的速度,這個(gè)速度即為該轉(zhuǎn)速下的自航點(diǎn)。3種轉(zhuǎn)速可得3次航速歷史變化,如圖4所示,可得3個(gè)不同的自航點(diǎn)。轉(zhuǎn)速越大,達(dá)到勻速的時(shí)間越短。600 r/min,需要約9 s, 可達(dá)到勻速1.55 m/s;450 r/min,需要約10.53 s, 可達(dá)到勻速1.15 m/s; 300 r/min,需要約14.39 s, 可達(dá)到勻速0.74 m/s。同時(shí),轉(zhuǎn)速越大,起始加速度越大。
圖3 不同轉(zhuǎn)速下AUV自航阻力和推力變化Fig.3 The resistance (R) and Thrust (T) of AUV self-propulsion at different rotation speeds
圖4 不同轉(zhuǎn)速下AUV自航過(guò)程的航速變化Fig.4 Velocity history (V) in AUV self-propulsion at different rotation speeds (n)
2.2 數(shù)值驗(yàn)證
為了驗(yàn)證數(shù)值模擬結(jié)果的準(zhǔn)確性,將AUV自航的數(shù)值結(jié)果與水池試驗(yàn)(試驗(yàn)在中國(guó)科學(xué)院沈陽(yáng)自動(dòng)化所的深水水池:L×B×D=25 m×15 m×9 m)結(jié)果進(jìn)行對(duì)比。圖5記錄了螺旋槳轉(zhuǎn)速為300 r/min的AUV速度歷史數(shù)據(jù)。包括5次試驗(yàn)結(jié)果,以離散數(shù)據(jù)點(diǎn)表示:Exp1、Exp2、Exp3、Exp4 和Exp5;數(shù)值結(jié)果以實(shí)線表示。數(shù)值模擬不受試驗(yàn)水池邊界的限制,因此數(shù)值模擬的時(shí)間較長(zhǎng)。數(shù)值結(jié)果和試驗(yàn)結(jié)果吻合良好。此外,為了驗(yàn)證不同轉(zhuǎn)速下AUV自航點(diǎn)的可靠性,將本文的結(jié)果與多參考坐標(biāo)系MFR(multi-frame of reference)的結(jié)果進(jìn)行對(duì)比驗(yàn)證,如圖6所示,獲得的自航點(diǎn)速度略低于MFR,誤差在5%以內(nèi)。在一段轉(zhuǎn)速范圍內(nèi),航速和轉(zhuǎn)速成正比。這是因?yàn)橄嘟囊欢无D(zhuǎn)速范圍內(nèi),推力系數(shù)接近常數(shù),阻力系數(shù)接近常數(shù)。螺旋槳推力與轉(zhuǎn)速成平方,勻速后推力與阻力相等,阻力與速度成平方,則自航點(diǎn)速度和轉(zhuǎn)速成正比。這個(gè)結(jié)論有助于更快找到不同轉(zhuǎn)速下的自航點(diǎn)。由轉(zhuǎn)速和航速的關(guān)系,根據(jù)設(shè)計(jì)航速1.5 m/s的要求,對(duì)圖6進(jìn)行插值,可得對(duì)應(yīng)自航點(diǎn)的轉(zhuǎn)速為570 r/min。
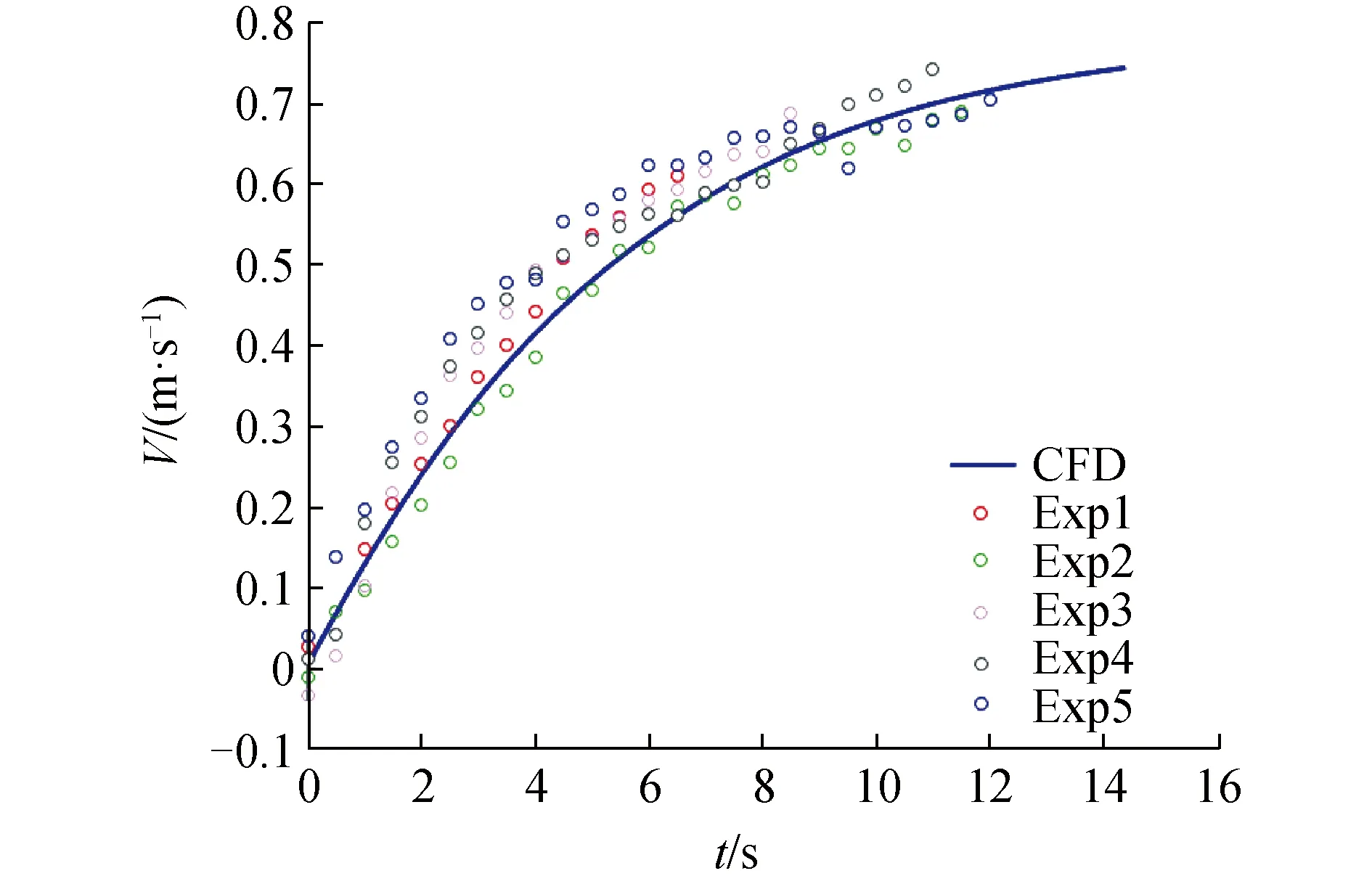
圖5 AUV自航速度變化的試驗(yàn)和數(shù)值結(jié)果 (n=300 r/min)Fig.5 The velocity history from experimental and numerical results in AUV self-propulsion at n=300 r/min
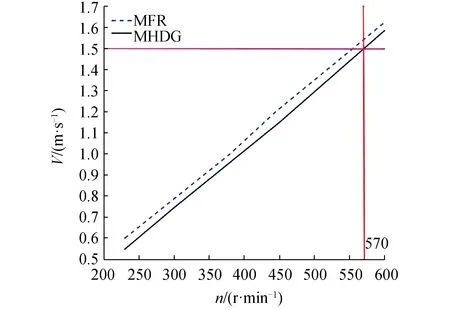
圖6 自航點(diǎn)對(duì)應(yīng)的轉(zhuǎn)速Fig.6 Approaching velocities vs. rotating speeds
2.3 流場(chǎng)分析
圖7為轉(zhuǎn)速n為300、 450和600 r/min時(shí)達(dá)到勻速直航的AUV對(duì)稱面上的速度云圖(注:遠(yuǎn)場(chǎng)速度為零)。可見(jiàn),轉(zhuǎn)速越大,螺旋槳的艉跡越明顯,梢渦強(qiáng)度越大,向后推水的水速度越大,反作用力越大,則推力越大。且轉(zhuǎn)速越大,AUV艏部的速度擾動(dòng)流場(chǎng)范圍越大,表明AUV達(dá)到自航點(diǎn)對(duì)應(yīng)的速度越大。3種勻速狀態(tài)時(shí),AUV艏部最大截面處都產(chǎn)生了艏渦,且隨著速度增加,艏渦范圍加大,表明AUV艏部粘壓阻力增加。隨著AUV速度增加,AUV艉部截面變化區(qū)域開(kāi)始產(chǎn)生艉渦(n=600 r/min),表明艉部速降增加,艉部粘壓阻力增加。同時(shí),3種航速時(shí),AUV表面都有較明顯的邊界層,從艏至艉逐步增厚。

圖7 AUV不同轉(zhuǎn)速對(duì)應(yīng)的自航點(diǎn)速度云圖Fig.7 Velocity contours of AUV at different self-propulsion points with varying rotation speeds
圖8為設(shè)計(jì)航速1.5 m/s對(duì)應(yīng)轉(zhuǎn)速570 r/min 的AUV自航過(guò)程4個(gè)典型時(shí)刻(t為0.1,3,4.9和6.9 s)對(duì)稱面上AUV的速度分布(右圖)和螺旋槳艉跡局部放大圖(左圖)。相應(yīng)的壓力云圖如圖9所示。可見(jiàn),當(dāng)轉(zhuǎn)速一定時(shí),AUV速度較低時(shí),螺旋槳艉跡強(qiáng),表明螺旋槳此時(shí)的推力較大(這與螺旋槳的敞水性能曲線一致,和圖3的推力曲線一致)。螺旋槳葉梢曳出的梢渦出現(xiàn)重疊;隨著AUV航速增加,梢渦強(qiáng)度降低,表明螺旋槳推力減少。但是梢渦分離清晰可見(jiàn),這是由AUV航行時(shí)的艉跡反向作用引起的。
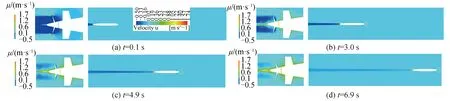
圖8 AUV自航對(duì)稱面上不同時(shí)刻的速度云圖(n=570 r/min)Fig.8 Velocity contours of AUV self-propulsion on the symmetry plane at different times with n=570 r/min
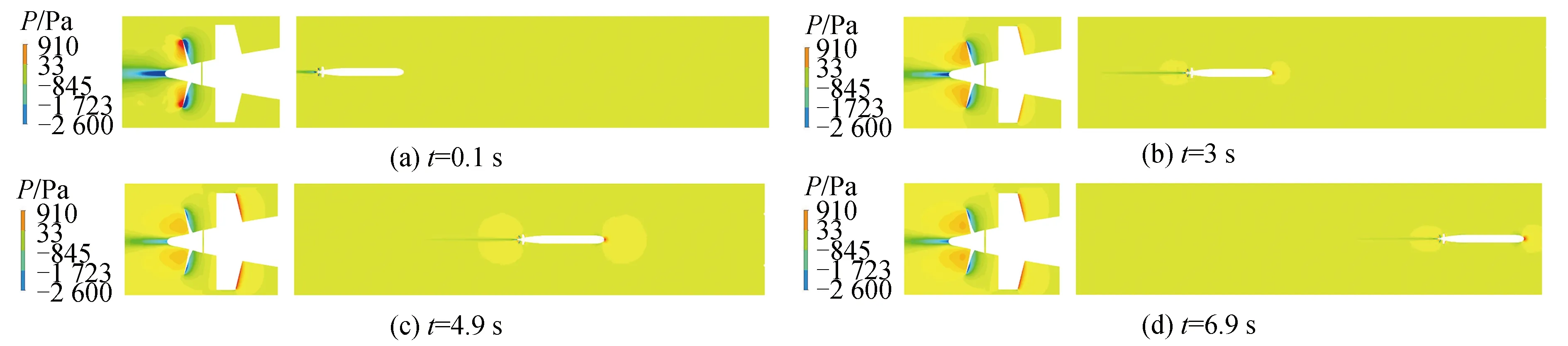
圖9 AUV自航對(duì)稱面上不同時(shí)刻的壓力云圖(n=570 r/min)Fig.9 Pressure contours of AUV self-propulsion at the symmetry plane at different times with n=570 r/min
隨著AUV航速的增加, 螺旋槳產(chǎn)生的推力在變小,這點(diǎn)在圖9的左側(cè)壓力云圖中清晰可見(jiàn)。低速時(shí),螺旋槳葉面的高壓值很大,葉背的低壓值也較大,導(dǎo)致兩者的壓差較大,因此推力較大;隨著AUV速度增加,葉面高壓值減小,葉背低壓值也減小,兩者的壓差變小,則推力也在減少。但是,隨著螺旋槳持續(xù)旋轉(zhuǎn),只要AUV推力大于阻力,AUV就獲得加速,隨著AUV速度增加,AUV艏部速度繞流場(chǎng)范圍加大,艏部駐點(diǎn)的壓強(qiáng)增加,導(dǎo)致AUV艏艉壓差阻力增加;同時(shí)艏肩部速度增加,導(dǎo)致摩擦阻力增加,AUV總阻力也在增加,直至與逐漸減小的推力平衡,達(dá)到勻速直航,即達(dá)到自航點(diǎn)。隨著螺旋槳推進(jìn)AUV自航,AUV艉跡延長(zhǎng)。螺旋槳艉跡梢渦強(qiáng)度隨AUV速度增加弱化。同時(shí),在螺旋槳轂帽附近有一股根渦,和AUV航行方向一致,流速大小隨著AUV速度增加而增加。
3 結(jié)論
1) 水下機(jī)器人不同轉(zhuǎn)速對(duì)應(yīng)的最終巡航速度不同。300、450和600 r/min分別對(duì)應(yīng)的巡航速度為0.74、1.15和1.55 m/s。AUV的巡航速度1.5 m/s對(duì)應(yīng)的轉(zhuǎn)速是570 r/min。
2) AUV自航穩(wěn)定所需時(shí)間與AUV轉(zhuǎn)速大小有關(guān)。轉(zhuǎn)速越大,加速度越大,穩(wěn)定需要時(shí)間越短。300、450和600 r/min穩(wěn)定分別需要14.39、10.53和 9 s。
3) 在螺旋槳轉(zhuǎn)速變化較小的范圍內(nèi),AUV的自航點(diǎn)速度和轉(zhuǎn)速成正比關(guān)系。
4) AUV自航時(shí),螺旋槳旋轉(zhuǎn)運(yùn)動(dòng)曳出梢渦和根渦。梢渦強(qiáng)度隨著AUV航速增加而降低,運(yùn)動(dòng)方向與AUV航行方向相反。根渦大小隨AUV航速增加而增加,方向與AUV航行方向一致。
5) 螺旋槳推力的變化起源于其葉面和葉背壓差變化。AUV以恒定轉(zhuǎn)速自航,推力隨速度增加而減小。
猜你喜歡
發(fā)明與創(chuàng)新·小學(xué)生(2021年3期)2021-03-25 11:48:49
科學(xué)(2020年5期)2020-11-26 08:19:22
軟件(2020年3期)2020-04-20 01:45:18
商周刊(2018年15期)2018-07-27 01:41:20
敦煌學(xué)輯刊(2018年1期)2018-07-09 05:46:42
北京教育·普教版(2017年1期)2017-02-05 13:26:23
新疆農(nóng)墾科技(2016年2期)2016-08-21 13:50:16
中國(guó)科技博覽(2016年2期)2016-04-25 20:32:39
小學(xué)生導(dǎo)刊(2016年34期)2016-04-11 00:49:44
新疆財(cái)經(jīng)大學(xué)學(xué)報(bào)(2015年3期)2015-12-10 03:49:15
