載人地月混合軌道一次脈沖應(yīng)急返回軌道分析
2020-04-10 01:38:28呂鵬偉尚志2王平
中國(guó)空間科學(xué)技術(shù) 2020年1期
呂鵬偉,尚志2,*,王平
1. 中國(guó)空間技術(shù)研究院 載人航天總體部,北京 100094 2. 中國(guó)航天科技集團(tuán)有限公司,北京 100048
近期,隨著美國(guó)重返月球“阿爾忒彌斯”計(jì)劃,全球范圍內(nèi)掀起了載人月球探測(cè)的熱潮。載人地月轉(zhuǎn)移軌道目前主要包括兩類:自由返回軌道(free return trajectory)和混合軌道(hybrid trajectory)[1]。自由返回軌道安全性較高,但能達(dá)到的環(huán)月軌道傾角受限于月球白道面附近;混合軌道前半段為自由返回階段,后半段為非自由返回階段,可以增強(qiáng)設(shè)計(jì)的靈活性。若要到達(dá)月球高緯度地區(qū)甚至極軌,則要采用混合軌道[2]。混合軌道的缺點(diǎn)是不能保證轉(zhuǎn)移后半程的安全性。因此,對(duì)于載人月球探測(cè)任務(wù),混合軌道的應(yīng)急軌道研究十分重要。
對(duì)于載人地月轉(zhuǎn)移軌道,中外學(xué)者進(jìn)行了大量研究。基于雙二體模型,Dallas[3]設(shè)計(jì)了不同類型的自由返回軌道,并對(duì)比了各類型在速度增量等方面的優(yōu)劣;李京陽[4]設(shè)計(jì)了地月轉(zhuǎn)移多段自由返回軌道,同時(shí)對(duì)轉(zhuǎn)移的速度增量進(jìn)行了分析,但地月轉(zhuǎn)移時(shí)間較長(zhǎng);黃文德等[5]對(duì)自由返回軌道及混合軌道進(jìn)行了設(shè)計(jì),并給出了混合軌道在能量消耗和飛行時(shí)間等方面的特性,但在特性分析方面缺少對(duì)混合軌道升交點(diǎn)特性的研究;黃文德等[6]對(duì)載人月球轉(zhuǎn)移直接中止及借助自由返回軌道中止返回兩種方式的速度增量與轉(zhuǎn)移時(shí)間等特性進(jìn)行了分析,但并未研究繞月后應(yīng)急機(jī)動(dòng)的可能;彭坤[7]利用人工免疫算法,對(duì)載人登月任務(wù)地月轉(zhuǎn)移雙脈沖的中止策略進(jìn)行了研究。基于三體模型,Mark等[8]設(shè)計(jì)了自由返回軌道的快速算法,但局限于對(duì)稱自由返回軌道;張科等[9]利用圓型限制性三體模型求解了雙脈沖地月轉(zhuǎn)移軌道,但其求得的地月轉(zhuǎn)移軌道轉(zhuǎn)移時(shí)間較長(zhǎng),不適合載人月球探測(cè)工程的應(yīng)用;侯錫云等[10]研究了對(duì)稱與非對(duì)稱的自由返回軌道,分析了不同軌道高度自由返回軌道傾角的限制范圍。郗曉寧等[11]對(duì)載人登月任務(wù)中止軌道問題進(jìn)行了綜述。
本文采用圓型限制性三體動(dòng)力學(xué)模型,研究了混合軌道的三種一次脈沖返回地球的應(yīng)急軌道,對(duì)其速度增量和轉(zhuǎn)移時(shí)間等特性進(jìn)行了分析,并從勢(shì)能角度解釋速度增量變化的趨勢(shì)。
1 混合軌道的應(yīng)急返回軌道
混合軌道由自由返回階段與非自由返回階段兩部分組成[5],如圖1所示。航天器在混合軌道中,首先進(jìn)入自由返回階段,選擇合適的時(shí)機(jī)實(shí)施一次混合機(jī)動(dòng),航天器將進(jìn)入非自由返回階段。對(duì)于混合軌道的應(yīng)急軌道,若載人飛船在自由返回階段出現(xiàn)故障,則可以沿自由返回軌道返回地球,實(shí)現(xiàn)再入。本文基于圓型限制性三體動(dòng)力學(xué)模型,利用微分修正算法,主要研究非自由返回階段的應(yīng)急軌道。
若載人飛船進(jìn)入非自由返回階段后發(fā)生故障,主要考慮三類應(yīng)急返回方式。方式一,直接返回,即在故障發(fā)生后實(shí)施一次軌道機(jī)動(dòng);方式二,故障發(fā)生后即刻機(jī)動(dòng),利用月球引力繞月后返回;方式三,在飛行器繞月后再實(shí)施機(jī)動(dòng)返回的方式。本文同時(shí)分析三類應(yīng)急返回方式需要的速度增量與轉(zhuǎn)移時(shí)間等特性。
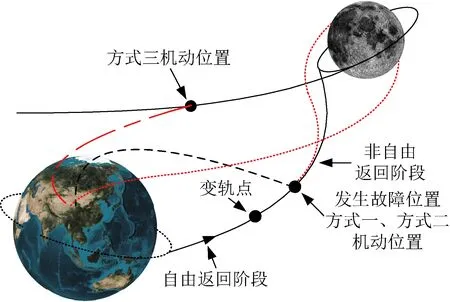
圖1 混合軌道的組成Fig.1 Composition of hybrid trajectory
1.1 方式一:直接返回
直接返回應(yīng)急方式的軌道機(jī)動(dòng)關(guān)系如圖2所示。當(dāng)航天器進(jìn)入混合軌道的非自由轉(zhuǎn)移階段后,若發(fā)生故障,進(jìn)行一次脈沖返回地球。
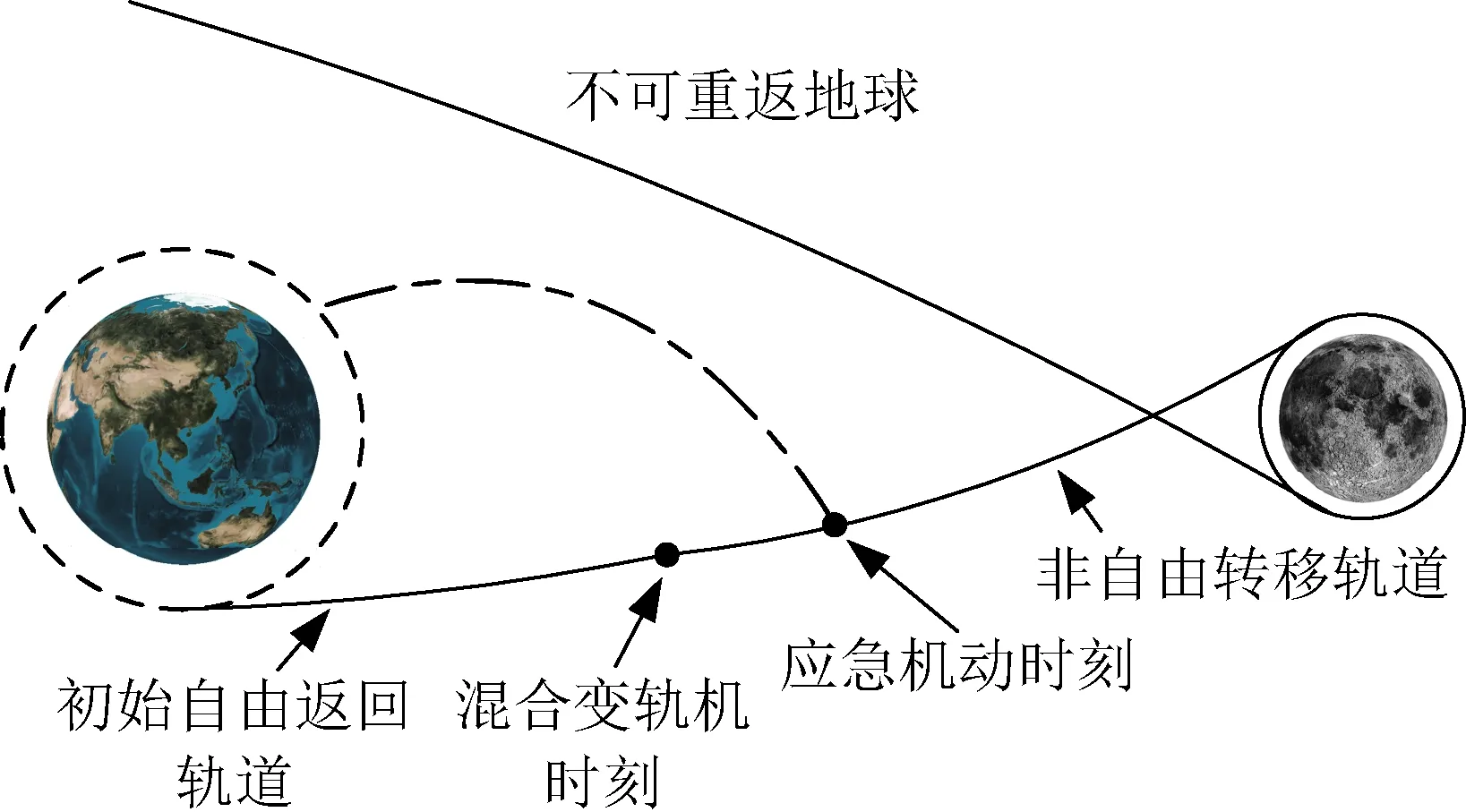
圖2 直接返回示意Fig.2 Sketch of direct return
在圓型限制性三體模型[13]中,狀態(tài)轉(zhuǎn)移矩陣刻畫了初始狀態(tài)改變量對(duì)終端狀態(tài)改變量的影響,記為Φ(t0,t)。狀態(tài)轉(zhuǎn)移矩陣[14]滿足以下方程:
(1)
式中:f(x)為圓形限制性三體問題的動(dòng)力學(xué)方程;A(t)為f(x)的雅克比矩陣。

約束變量F(Xrf)與再入時(shí)的狀態(tài)變量Xrf存在以下關(guān)系:
δF(Xrf)=BδXrf
(2)
(3)
因此,約束變量F(Xrf)與機(jī)動(dòng)后的初始狀態(tài)變量滿足以下關(guān)系:
δF(Xrf)=BδXrf=BA1δX0
(4)
其中:A1為Xrf的雅克比矩陣。
至此,對(duì)于給定的再入高度、再入角與應(yīng)急返回轉(zhuǎn)移時(shí)間,就可以通過微分修正不斷迭代,確定直接返回轉(zhuǎn)移所需要的速度增量。
1.2 方式二:即刻機(jī)動(dòng)繞月返回
故障發(fā)生后即刻機(jī)動(dòng),繞月返回的應(yīng)急方式通過借助月球的引力改變航天器的運(yùn)動(dòng)方向,從而實(shí)現(xiàn)節(jié)省速度增量,其機(jī)動(dòng)關(guān)系如圖3所示。
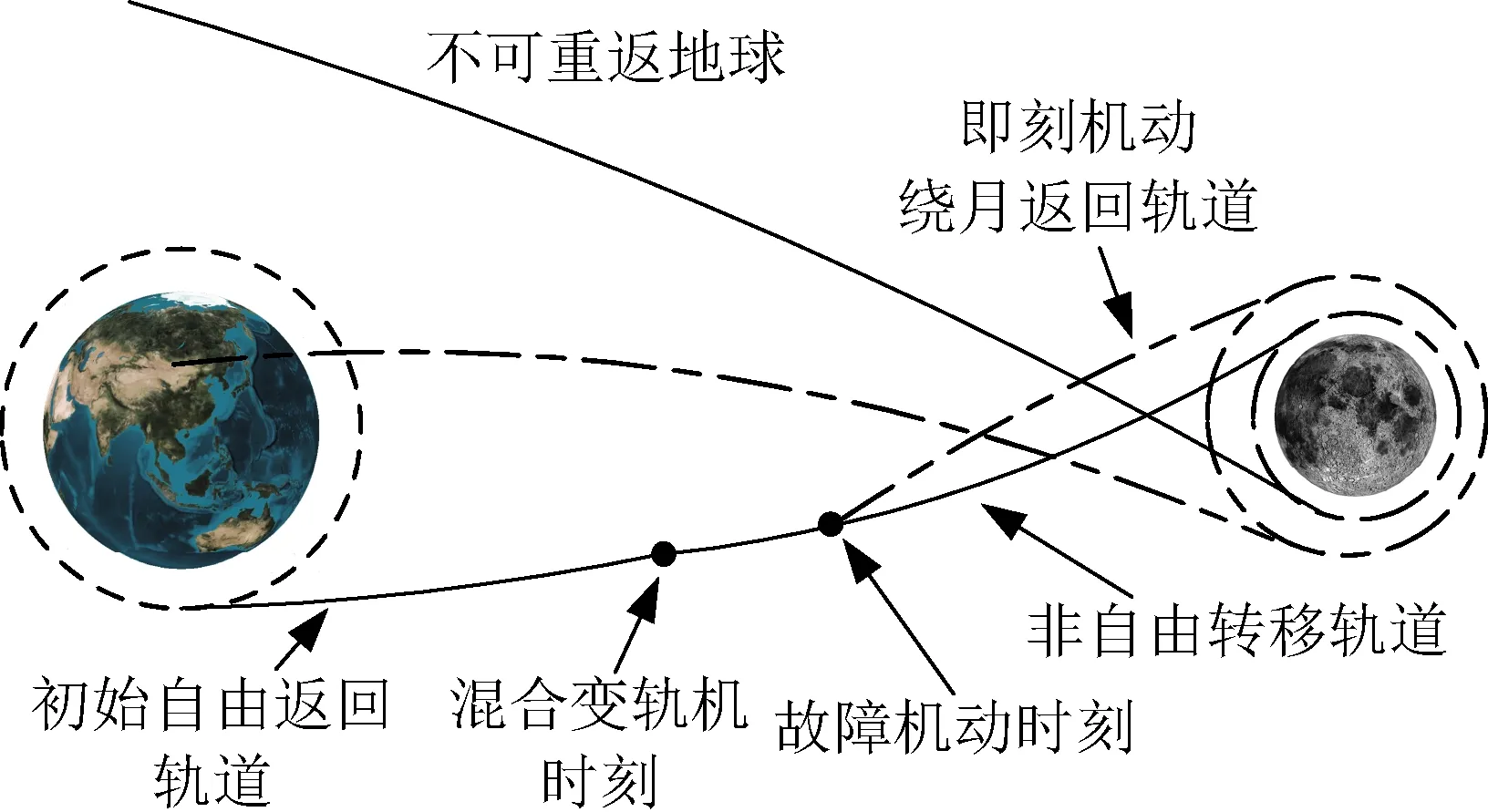
圖3 即刻機(jī)動(dòng)繞月返回示意Fig.3 Sketch of immediate transfer and flying by the moon

δF(Xmf)=CδXmf
(5)
(6)
(7)
其中A2為Xmf的雅克比矩陣。
聯(lián)立方程(4)~(6),得到完整即刻機(jī)動(dòng)繞月返回約束變量與初始狀態(tài)變量的關(guān)系:
(8)
其中,F(xiàn)(Xf)=[F(Xrf),F(Xmf)],Xf=[Xrf,Xmf]T。對(duì)于給定的故障發(fā)生后即刻返回時(shí)刻,通過微分方程(8)不斷迭代修正,可以確定到達(dá)給定的再入高度與再入角所需要的速度增量。
1.3 方式三:繞月后機(jī)動(dòng)返回
繞月后機(jī)動(dòng)返回的應(yīng)急模式是指當(dāng)航天器進(jìn)入非自由返回階段發(fā)生故障后,不立即進(jìn)行軌道機(jī)動(dòng),而是繞過月球后,再選擇合適的時(shí)機(jī)進(jìn)行應(yīng)急機(jī)動(dòng)。這種模式通過利用地月空間三體區(qū)高勢(shì)能[15]的特點(diǎn),以此期望實(shí)現(xiàn)降低速度增量的應(yīng)急機(jī)動(dòng)模式,其機(jī)動(dòng)關(guān)系如圖4所示。

圖4 繞月后機(jī)動(dòng)返回示意Fig.4 Sketch of transfer after spacecraft flying by the moon

δF(Xrf)=BδXrf=BA1δXt
(9)
利用方程(9),通過調(diào)整各個(gè)方向上的速度增量,可以解得繞月后機(jī)動(dòng)返回總的速度增量與轉(zhuǎn)移時(shí)間。
2 應(yīng)急返回軌道特性分析
對(duì)于載人地月混合軌道的應(yīng)急返回軌道,關(guān)注的重點(diǎn)應(yīng)聚焦于機(jī)動(dòng)所需的速度增量與轉(zhuǎn)移需要的時(shí)間。本文著重對(duì)這兩個(gè)要素進(jìn)行特性分析。
2.1 直接返回方式
對(duì)于直接返回方式,由第1.1小節(jié)的分析可知,應(yīng)急返回所需的速度增量與應(yīng)急機(jī)動(dòng)發(fā)生時(shí)刻和應(yīng)急返回轉(zhuǎn)移時(shí)長(zhǎng)等要素有關(guān)。圖5給出了不同應(yīng)急機(jī)動(dòng)時(shí)刻與不同轉(zhuǎn)移時(shí)長(zhǎng)的關(guān)系。
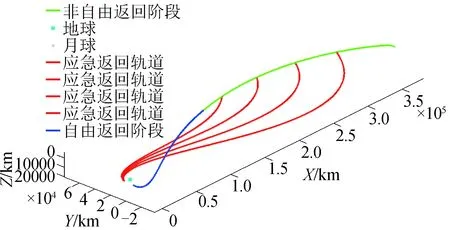
圖5 不同時(shí)刻直接返回示意Fig.5 Sketch of direct return at different time
為分析不同應(yīng)急機(jī)動(dòng)時(shí)刻、轉(zhuǎn)移時(shí)長(zhǎng)與速度增量的關(guān)系,本文假設(shè)初始自由返回軌道瞄準(zhǔn)的目標(biāo)環(huán)月軌道近月點(diǎn)高度為200 km,軌道傾角為175°,混合變軌時(shí)刻為近地軌道加速后的24 h,軌道瞄準(zhǔn)的目標(biāo)環(huán)月軌道近月點(diǎn)高度為200 km,軌道傾角為110°,返回地球時(shí)再入高度為120 km,再入角為-6°。其特性如圖6所示。圖7為不同應(yīng)急機(jī)動(dòng)時(shí)刻下航天器在會(huì)合坐標(biāo)系下的勢(shì)能變化情況。
圖6給出了不同變軌時(shí)刻與返回時(shí)長(zhǎng)需要速度增量的等高線圖。由圖6可以看出,對(duì)于不同的應(yīng)急機(jī)動(dòng)時(shí)刻,速度增量出現(xiàn)先降低后增加的趨勢(shì),與圖7中航天器的勢(shì)能變化趨勢(shì)基本一致,符合在高勢(shì)能位置變軌需要的速度增量較少的基本原理[14]。
圖6 直接返回轉(zhuǎn)移時(shí)間與速度增量特性Fig.6 Characteristics of transfer time and velocity increment in direct return
圖7 直接返回不同機(jī)動(dòng)時(shí)刻的勢(shì)能Fig.7 Potential energy of variant transfer moments in direct return
2.2 即刻機(jī)動(dòng)繞月返回方式
直接返回的方式雖然返回時(shí)間較短,但需要的速度增量較大。即刻繞月返回方式期望通過月球借力改變航天器飛行方向,以達(dá)到降低速度增量消耗的目的。
與第2.1小節(jié)中采用的混合軌道相同,在故障發(fā)生后即刻進(jìn)行一次軌道機(jī)動(dòng),實(shí)現(xiàn)繞月返回。圖8給出了不同時(shí)刻應(yīng)急機(jī)動(dòng)繞月返回所需要的速度增量。由圖8可知,隨著飛行時(shí)間的增加,起初速度增量隨之緩慢增加,但當(dāng)飛行器進(jìn)入月球影響球后的一段時(shí)間,速度增量會(huì)急劇增加。由于距離混合變軌時(shí)間越長(zhǎng),飛行器偏離原自由返回軌道相對(duì)越遠(yuǎn),因此繞月重返地球的代價(jià)會(huì)越大。
只考慮進(jìn)入月球影響球前的狀態(tài),圖9給出了飛行器到達(dá)月球影響球之前的速度增量與總共飛行時(shí)間的變化情況。由圖9可以看出,若故障發(fā)生在月球影響球之前,則應(yīng)急返回所需的速度增量小于80 m/s,總的轉(zhuǎn)移時(shí)間為4.5~5.8 d。
圖8 即刻機(jī)動(dòng)繞月返回速度增量Fig.8 Transfer velocity increment of immediate transfer and flying by the moon
圖9 到達(dá)月球影響球前返回速度增量和總時(shí)間Fig.9 Transfer velocity increment and total time before getting into lunar sphere of influence
2.3 繞月后機(jī)動(dòng)返回方式
由第2.1小節(jié)與第2.2小節(jié)中的分析可知,當(dāng)載人航天器飛臨月球附近時(shí),直接返回與即刻繞月返回應(yīng)急方式的速度增量急劇增加。考慮通過飛行器繞過月球后進(jìn)入高勢(shì)能區(qū)后再進(jìn)行機(jī)動(dòng),以期望降低應(yīng)急返回的速度增量。不同時(shí)刻繞月后返回示意如圖10所示。
圖11分析了不同飛行時(shí)刻實(shí)施應(yīng)急機(jī)動(dòng)、返回時(shí)長(zhǎng)與應(yīng)急返回所需速度增量的關(guān)系。對(duì)于應(yīng)急機(jī)動(dòng)時(shí)刻,機(jī)動(dòng)時(shí)刻越靠后,需要的速度增量越少,與圖12中勢(shì)能隨著應(yīng)急機(jī)動(dòng)時(shí)刻的增加而增大的趨勢(shì)一致,符合高勢(shì)能位置變軌需要的速度增量較少的基本原理。
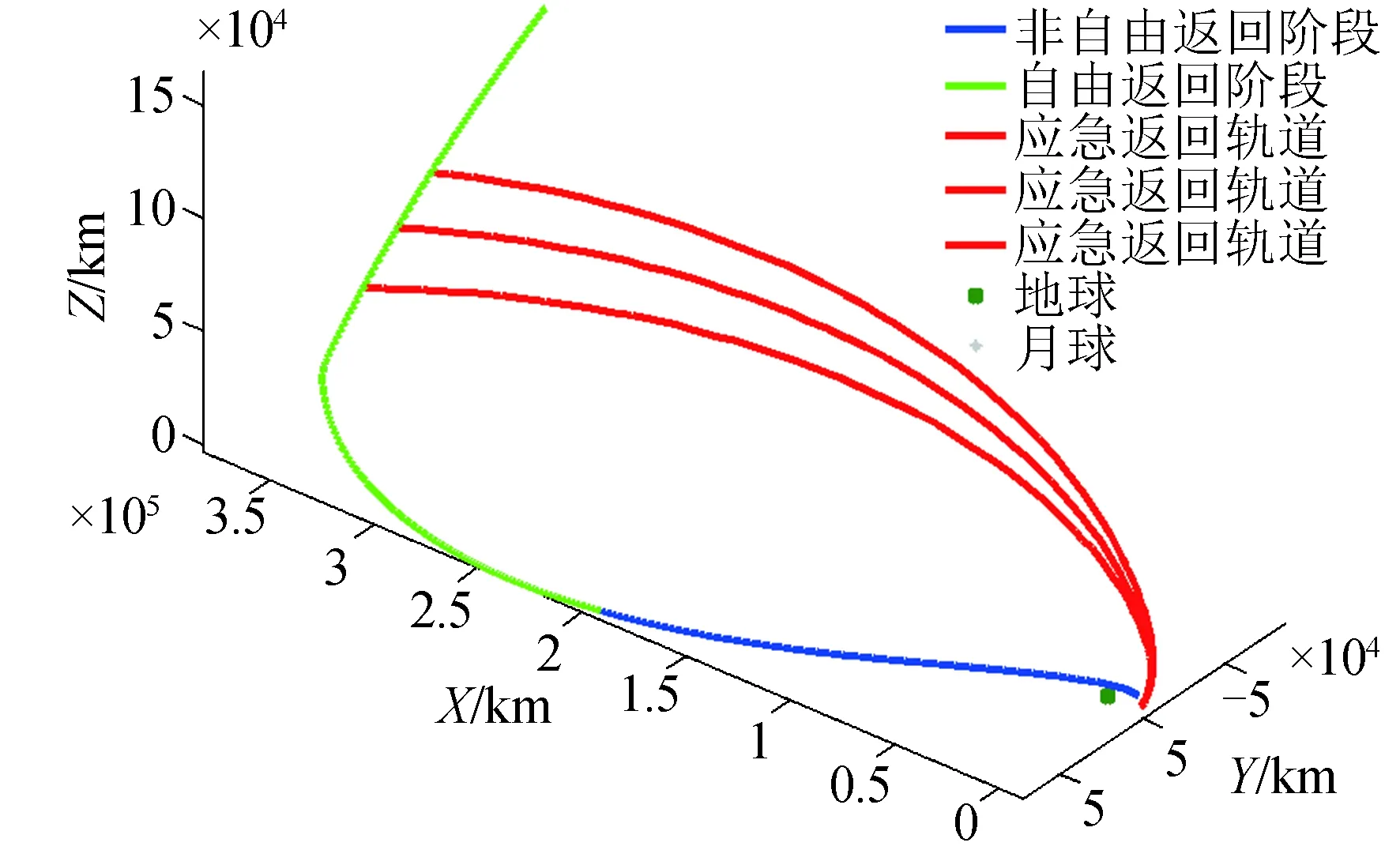
圖10 不同時(shí)刻繞月后機(jī)動(dòng)返回示意Fig.10 Sketch of transfer after spacecraft flying by the moon at different times
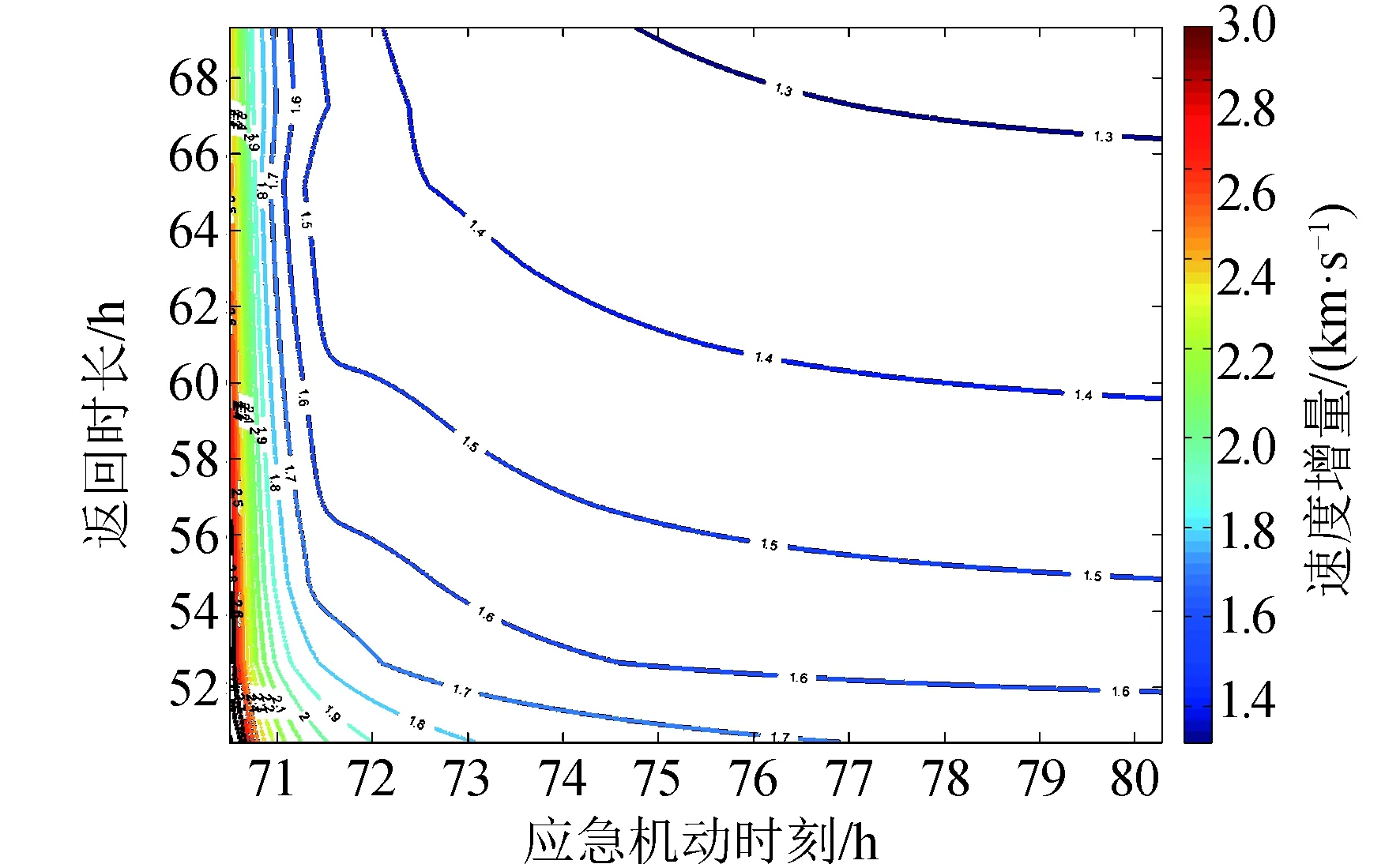
圖11 不同時(shí)刻繞月返回轉(zhuǎn)移時(shí)間與速度增量特性Fig.11 Characteristics of transfer time and velocity increment
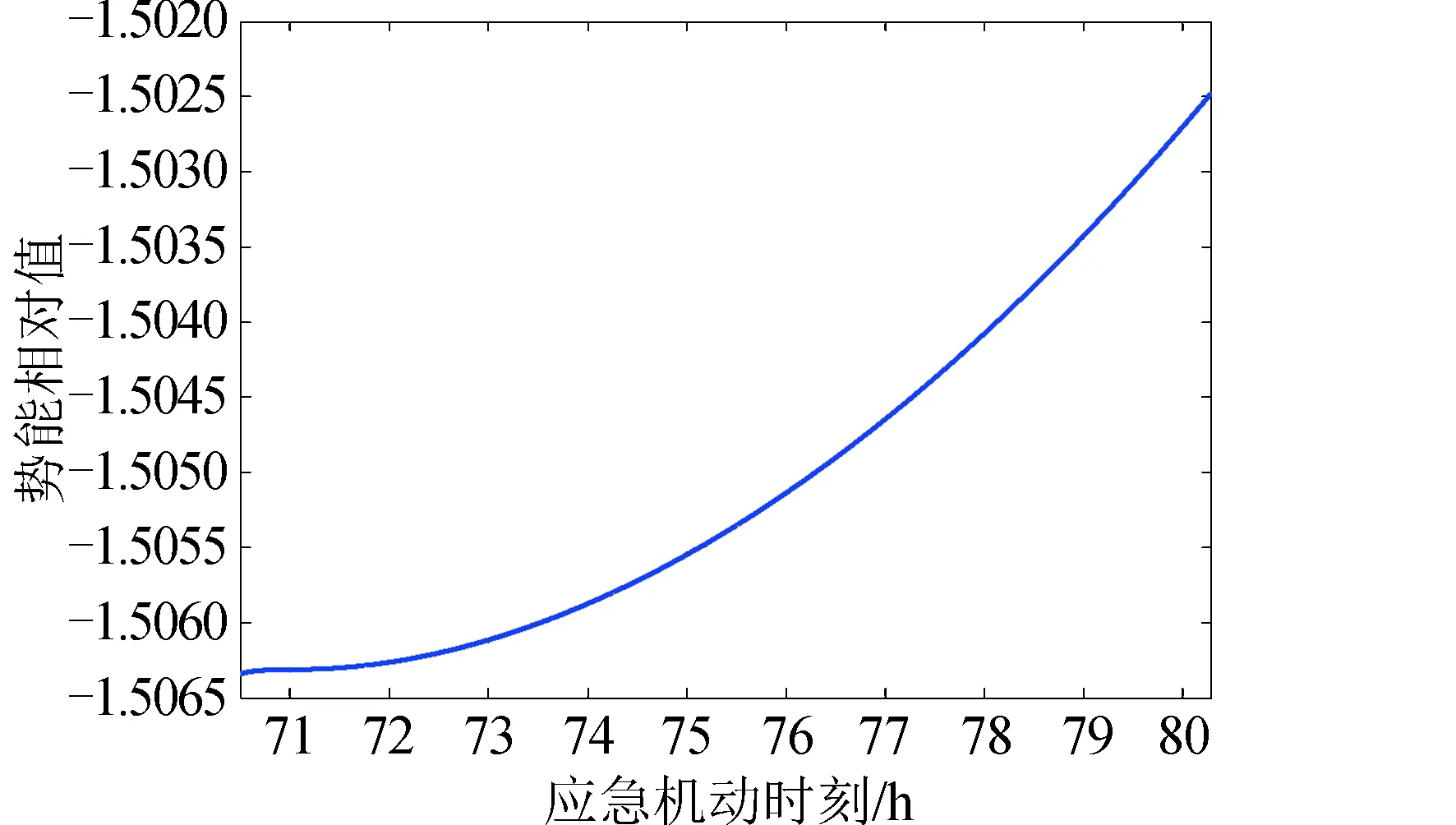
圖12 繞月后機(jī)動(dòng)返回不同機(jī)動(dòng)時(shí)刻的勢(shì)能Fig.12 Potential energy of variarit transfer moments
3 結(jié)束語
通過對(duì)載人地月混合軌道一次脈沖應(yīng)急返回軌道的設(shè)計(jì)與特性分析,可以得到以下結(jié)論:
1) 對(duì)于直接返回的應(yīng)急策略,轉(zhuǎn)移時(shí)間相對(duì)較短,但速度增量較大,可以選擇合適的機(jī)動(dòng)時(shí)刻以降低應(yīng)急機(jī)動(dòng)的速度增量。
2) 即刻機(jī)動(dòng)繞月返回的方式,在到達(dá)月球影響球之前可顯著降低應(yīng)急機(jī)動(dòng)的速度增量,轉(zhuǎn)移時(shí)間小于自由返回軌道轉(zhuǎn)移的周期;當(dāng)載人航天器到達(dá)月球附近時(shí),轉(zhuǎn)移需要的速度增量急劇增大,不適用于實(shí)際工程的應(yīng)用。
3) 對(duì)于繞月后機(jī)動(dòng)返回的策略,離開月球越遠(yuǎn),返回需要的時(shí)間越短,所需的速度增量越少。當(dāng)飛行器在地月轉(zhuǎn)移中距離月球較近時(shí),可以考慮使用此類應(yīng)急策略。
