試論自適應移動轉向多功能園林修剪機械設計
2020-04-10 07:39:46萬程
花卉 2020年6期
萬程
(天津城建大學城市藝術學院 天津市 300384)
城市化背景下,風景園林項目逐漸增多,其在多元要素維護管理額基礎上,為人們創造了良好、舒適的生活環境。樹木修剪是園林管理的重要內容,傳統管理模式下,園林修剪采用人工修剪+半自動機械修剪的方式,這種方式修剪效率低,且修剪設備容易受障礙物影響。基于此,設計一款具有自動定位導航和園林植修剪功能的機械設備已經成為當前園林建設管理的內在要求。本文基于激光傳感器定位系統下,設計一款具有自適應移動轉向功能的多功能園林修剪機械。
1 機械激光傳感器定位系統結構組成
信息時代下,激光雷達技術獲得了迅速發展,其能在大范圍持續探測的基礎上,為導航提供高精度的基礎信息。從導航應用效果來看,激光高航具有測量范圍大、測量光束小、測度精準、環境干擾小的特點。現階段,園林產業迅速興起,在園林枝葉修剪過程中,人們對于修剪的精度提出了較高要求,然采用人工及半自動機械修剪,則很難達到這一修剪要求,同時,修剪的效率角度,需進行修剪方法、修剪設備的優化創新。
在園林修剪設備中使用激光傳感器定位系統,可以通過激光測定修剪設備與樹木枝葉的距離位置,以此來滿足自適應移動轉向要求,實現高精度修剪。從機械激光傳感器定位系統結構要素來看,其不僅包含了PC 處理器這一核心單元,而且涉及激光發射、接受裝置,同時CPLD 時間間隔計時器等都是其基本的組成要素。在實際應用中,該系統能在脈沖開關的支撐下,實現PC機的自動復位,確保設備具備自適應功能,同時,通過CPLD 計時單元,修剪設備的自動化控制得以實現[1],見圖1。需注意的是,在實際作業中,具體的控制指令和結果會在顯示器上實時顯示。
2 多功能園林修剪機械測距及移動原理
2.1 多功能園林修剪機械測距
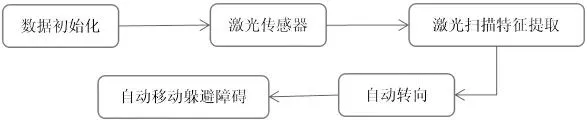
圖1 自適應移動轉向流程
激光測距和掃描是多功能園林修剪機械自適應一定轉向的主要支撐[2]。相對而言,激光測距的實現過程較為簡單,設定激光發射器為激光信號源,激光在空氣中的傳播速度為V,則當激光發出后,一旦受到障礙物,則激光會在反射原理下沿著與射出方向相向的狀態返回,同時返回信號會被光電探測器所接收,若從發出激光信號到光電探測器所接收信號的時間為T,則實際的測距為:
S=VT/2
2.2 多功能園林修剪機械移動轉向
要實現多功能園林修剪機械的精確一定,在定位導設計中,不僅要關注多功能園林修剪機械與障礙物的距離因素,同時還需考慮照度、大氣通過率、障礙物漫反射率的有效把控。
就照度因素而言,激光在發出后,其光強會按照高斯均勻分布,設定激光發射器的峰值功率為TtPt,同時,發射激光束立體角和傳送距離分別以Ωt和R 代替,則激光照射在物體上的實際照度可表示為:

式中:Ta表示在傳輸距離為R 的條件下,激光實際的大氣透過率。在大氣透過率計算中,需注重大氣消光系數的有效把控。多功能園林修剪機械設計中,為簡化設計計算過程,將障礙物的發射狀態設定為滿發射,則可知輻射亮度與出社射照度的關系可表示為:
然而在實際中,滿發射的狀態往往難以實現,這是因為光在大氣中傳播本身會出現衰減現象。即采用激光測距設備進行多功能園林修剪設備定位移動是,需注重漫反射率的有效測定。然后依次來獲得目標的輻射出射度和被測障礙物輻射亮度。當精確獲得障礙物實際亮度后,修剪設備會通過激光掃描提取障礙物具體特征,然后結合測距信息,實現修剪機械位置、姿態和工作狀態的調整。需注意的是,一旦多功能園林修剪機械對于修剪精度要求較高,則在設備測距和定位過程中,需使用激光放大鏡,這樣能使得激光信號的能量聚集在一定的頻率,同時,測試人員能實現激光輻射出射度、被測障礙物輻射亮度的高精度把控,進而為多功能園林修剪機械應用提供有效指導。
2.3 多功能園林修剪機械應用狀態
現階段,自適應移動轉向多功能修剪機械在園林工程中的應用不斷深入。從使用過程來看,其能在激光雷達的支撐下,通過掃描獲取障礙物的距離;同時借助于地圖坐標和自身位置坐標的對比,自身距離得以精確定位;此外,通過激光掃描,其還能獲得障礙物的特征尺寸信息。這些信息為多功能園林修剪機械的轉向和移動提供了充分的數據支撐,其有效地躲避了障礙物,確保了設備自動轉向和換行功能的實現[3]。
3 基于激光傳感器定位系統的多功能園林修剪機械性能測試
3.1 測距及轉向可行性測試設計
要確保多功能園林修剪機械自動測距、定位功能的有效實現,在設備使用初期,就必須進行激光傳感器自適應移動轉向性能的有效測定。在實際測試中,不僅要進行PC 機的有效測試,還需進行激光發射與接收裝置性能的有效檢測。具體而言,當前方出現障礙物時,激光傳感器能自主性的發出激光束,對障礙物進行掃描,同時PC 機能對掃描的信息進行分析、識別和處理,從而做出移動距離和轉動角度的精確調整。
借助于PC 機對掃描信息進行分析時,需強化最小二乘法擬合的有效應用,通過擬合出來,設備中心控制處理器能實現特征曲線的有效生成,并以此為基礎,進行障礙物特征信息判斷。研究表明,該設備能在系統掃描園林環境的基礎上,實現障礙物尺寸、距離、位置等相關信息的準確把控,這能為自適應轉向多功能修剪設備的應用提供指導,可見在園林修剪機械設備上設置自適應移動和轉向導航是可行的。
3.2 激光傳感器定位精度測試
傳統作業模式下,人們常采用人工修剪+半自動機械修剪的方式進行園林修剪,該修建方式雖然效率較低,修剪質量受人為因素影響明顯,然在修剪機械使用中,其碰撞障礙物的概率角度。新時期,基于激光傳感器定位系統,自適應移動轉向多功能園林修剪機械的應用不僅關注設備應用的可行性,更要對其精度要素進行準確把控。對此,設計激光傳感器自動作業機和非激光傳感器自動作業機進行園林修剪,并對其成功避讓障礙物的次數進行統計,得出表1 結果。
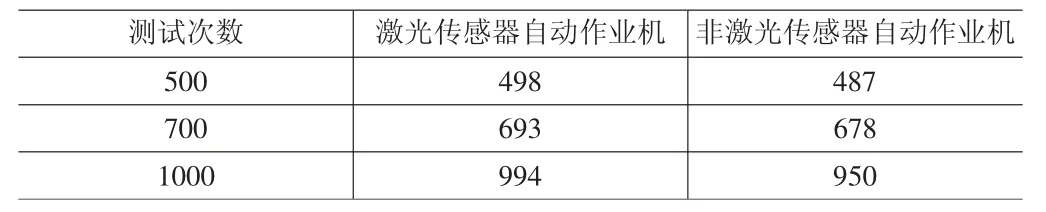
表1 兩種設備成功避讓障礙物轉向次數統計(次)
由表1 可知,在自適應移動轉向多功能園林修剪機械使用中,采用激光傳感器系統進行定位導航,設備成功避讓障礙物的轉向次數明顯較多,這表明激光測距和掃描能為自適應移動轉向多功能園林修剪機械的應用提供導航支撐,其能有效提升設備的移動和轉向效率,確保設備作業精度和質量,值得在園林修剪中推廣應用。
4 結論
自適應移動轉向多功能園林修剪機械對于現代園林產業發展具有重大影響。實踐過程中,園林工作者只有重分認識到多功能園林修剪機械的優越性,并在明確其自適應移動轉向原理的基礎上,進行工作過程的規范控制,才能有效地提升自適應移動轉向多功能園林修剪機械的運作質量,進而提升園林修剪水平,推動園林產業的有序發展。
猜你喜歡
中國特種設備安全(2022年6期)2022-09-20 02:52:28
電腦報(2020年35期)2020-09-17 13:25:53
當代工人(2020年8期)2020-05-25 09:07:38
電腦報(2019年40期)2019-09-10 07:22:44
經濟技術協作信息(2018年22期)2019-01-19 03:00:18
電子制作(2018年11期)2018-08-04 03:26:08
小溪流(畫刊)(2017年12期)2018-01-10 16:07:29
科技知識動漫(2016年8期)2016-07-29 20:40:09
工業設計(2016年12期)2016-04-16 02:52:00
兒童故事畫報·發現號趣味百科(2015年12期)2016-01-25 00:41:49
