基于頻譜響應的伺服轉臺控制系統設計及改進
2020-04-14 04:50:27劉鋼伍宇花
中文信息 2020年3期
關鍵詞:卡爾曼濾波
劉鋼 伍宇花

摘 要:基于經典控制理論和線性系統模型的控制策略無法解決被控對象中存在的摩擦、死區、齒隙等非線性因素的影響,而對伺服轉臺的控制恰好包括了上述因素。在實際項目中,我們將整個伺服轉臺作為一個控制對象,采用數字式頻響測試儀完成對轉臺的頻率響應測試,采用相關性分析法去除測量噪聲,得到轉臺的開環幅頻和相頻特性曲線;再利用Matlab系統辨識工具箱完成對轉臺對象模型的辨識,得到轉臺的開環傳遞函數;接下來使用MATLAB的單輸入單輸出工具箱根據經典控制理論方法對系統作超前滯后校正;最后進行系統仿真測試驗證和實物測試驗證。在項目實際中,針對系統固有的缺陷采用了卡爾曼濾波來提升系統的特定性能,實際結果也證明了采用此方法的有效性。
關鍵詞:頻譜響應 相關性去噪 對象建模 系統辨識 卡爾曼濾波
中圖分類號:TP273文獻標識碼:A文章編號:1003-9082(2020)03-000-02
伺服轉臺建模和控制策略的研究一般是基于經典控制理論和線性系統模型,這種方法雖然很有效但其無法同時解決轉臺中存在的摩擦、死區、齒隙等非線性因素對跟蹤精度和動態特性等指標帶來的不良影響[1] 。在進行控制系統開發時,項目對開發時間要求愈來愈緊迫。如何快速準確地建立控制對象模型、系統的校正以及驗證等是設計人員最關心的問題。本文提出了一種解決這個問題的方案,即先采用數字式頻響測試儀對光電轉臺進行頻譜響應測試得到對象的頻譜響應,利用相關性分析法去除測量等噪聲,得到原始的對象開環幅頻和相頻特性,再根據經典控制理論利用Matlab系統辨識工具箱完成對象模型的辨識,再根據對象模型的特點和系統設計要求使用MATLAB的單輸入單輸出設計工具箱對系統作超前滯后校正,最后通過仿真及實物測試進行驗證。在項目中所采用的工具主要為dSPACE實時系統、Matlab系統辨識工具箱和單輸入單輸出設計工具箱。
一、被控對象頻譜響應測試及模型辨識
大部分的運動控制系統由于受到控制電機時間常數的限制,系統的頻寬一般不會超過60Hz。整個系統控制器設計架構如圖1所示。
圖1 系統設計架構圖
在對被控對象進行頻響測試時,我們采用的信號生成與數據采集系統為dSPACE實時系統,通過該系統來對被控對象進行掃頻和數據記錄,在試驗中,系統掃描頻率選定的范圍為系統實際工作頻率段1~100Hz,采樣頻率為2kHz。選定的系統輸入信號為,系統的系統輸出信號可表示為:,其中為測量噪聲。
在項目中,我們使用頻響應的相關分析法來去除測量噪聲,定義兩個量如下:
,
將輸出信號代入上述兩式經推導后和可以通過下面兩式得到:
,
再通過下面兩式可以計算得到被控對象模型相應的幅頻特性和相頻特性。
,
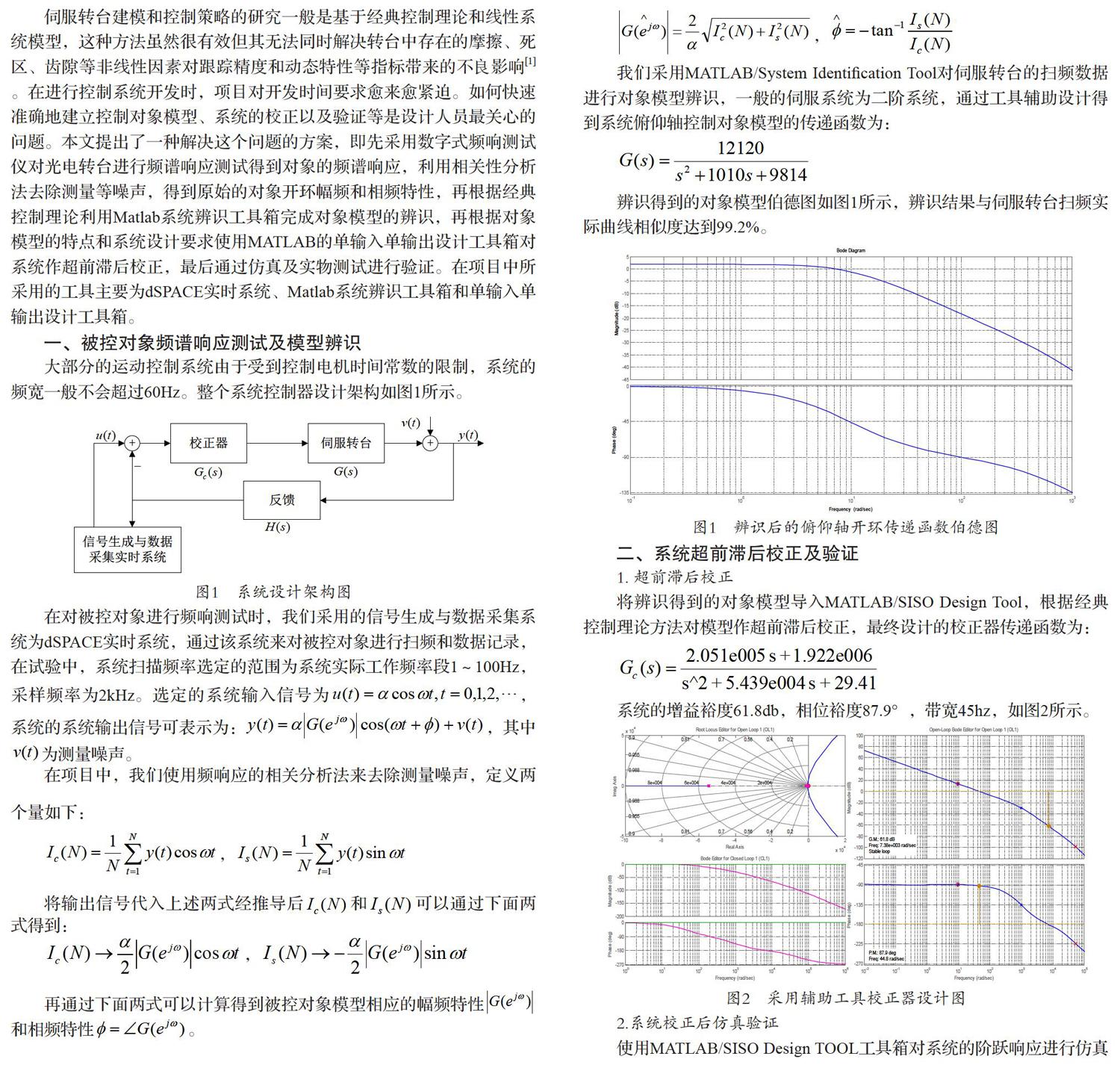
我們采用MATLAB/System Identification Tool對伺服轉臺的掃頻數據進行對象模型辨識,一般的伺服系統為二階系統,通過工具輔助設計得到系統俯仰軸控制對象模型的傳遞函數為:
辨識得到的對象模型伯德圖如圖1所示,辨識結果與伺服轉臺掃頻實際曲線相似度達到99.2%。
圖1 辨識后的俯仰軸開環傳遞函數伯德圖
二、系統超前滯后校正及驗證
1. 超前滯后校正
將辨識得到的對象模型導入MATLAB/SISO Design Tool,根據經典控制理論方法對模型作超前滯后校正,最終設計的校正器傳遞函數為:
系統的增益裕度61.8db,相位裕度87.9°,帶寬45hz,如圖2所示。
圖2 采用輔助工具校正器設計圖
2.系統校正后仿真驗證
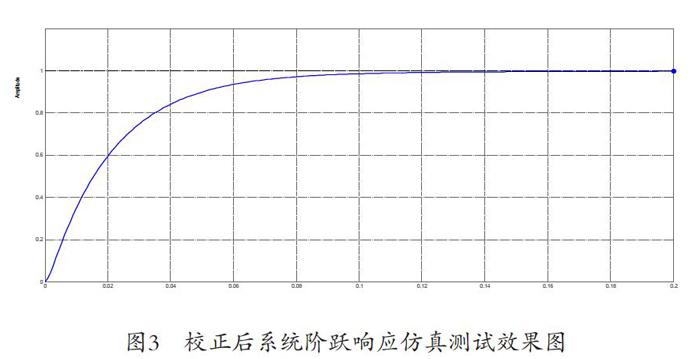
使用MATLAB/SISO Design TOOL工具箱對系統的階躍響應進行仿真驗證測試,得到圖3曲線,可以看出系統在收到指令后能夠很快的穩定且無超調現象,仿真驗證效果如圖3所示。
圖3 校正后系統階躍響應仿真測試效果圖
3. 被控對象實物測試驗證
將上述的設計結果寫入伺服控制程序中,再通過dSPACE半實物仿真系統的ControlDesk[3]軟件對被控對象進行測試,系統實物性能測試結果如圖4所示。
比較圖3和圖4的曲線可知,系統實物性能測試結果與仿真測試結果相差不大,符合設計的要求。
圖4 伺服轉臺閉環階躍響應測試曲線
三、對快速目標跟隨性能的改進
設計好的伺服系統雖然能夠很好地跟隨預定的目標,但是也有特例的情況出現。如目標進行高機動和高速運動,跟隨的效果就會打折扣。如何在現有的架構上進行改進?在項目中,我們通過采用卡爾曼濾波根據系統實時計算的目標信息來對目標的下一點進行預測,也就是增加提前量來解決快速目標的跟蹤問題。圖5(左)所示為未采用卡爾曼濾波的跟蹤效果,圖5(右)所示為采用卡爾曼濾波的跟蹤效果。
圖5 未采用(左)和采用(右)卡爾曼濾波的跟蹤效果
從上面兩張跟蹤效果圖大概可以看出未采用卡爾曼濾波的跟蹤在過零線處(也就是目標速度達到最大的時候)的誤差要比采用了卡爾曼濾波預測的要大,但是在目標反向的時候,由于采用了卡爾曼濾波預測技術,其對目標反向的動作有滯后的現象,因此在反向處未采用預測的跟蹤效果要比它好。實際上,大多數的目標還是沿直線做勻速或加減速運動,因此,采用這種方法還是有很大實際應用價值的。
四、結論
首先,充分借用伺服系統設計輔助工具可以幫助廣大工程技術人員快速地對被控對象進行系統模型辨識、校正器的設計和驗證。再次,由于被控對象本身固有的特性,針對某些特別的要求,我們可以借助其他的方法(如本項目中所用到的卡爾曼濾波預測技術)來提升特定的性能。本文中所設計的伺服轉臺控制系統已經在某項目中得到很好的驗證,控制性能滿足系統的設計指標要求。
參考文獻
[1]胡壽松.自動控制原理(第4版)[M].北京:科學出版社,2001.
[2]dSPACEInc.dSPACEUserGuide,DigitalSignalProcessingandControlEngineering[M].dSPACEGmbH.2003
[3]dSPACEInc.ControlDeskExperimentGuide[M].dSPACEGmbH.2005
猜你喜歡
測控技術(2018年11期)2018-12-07 05:49:38
測控技術(2018年12期)2018-11-25 09:37:34
電測與儀表(2017年20期)2017-12-19 05:14:28
北京航空航天大學學報(2017年9期)2017-12-18 07:12:25
中國慣性技術學報(2017年1期)2017-06-09 08:15:14
電測與儀表(2016年21期)2016-04-11 12:42:44
電源技術(2016年9期)2016-02-27 09:05:39
江蘇科技大學學報(自然科學版)(2015年4期)2015-12-17 12:42:50
電源技術(2015年1期)2015-08-22 11:16:28
電測與儀表(2015年24期)2015-04-09 12:04:36
