智能搶險裝置的設(shè)計
2020-04-14 04:54:29王飛夏百花
電腦知識與技術(shù) 2020年4期
關(guān)鍵詞:機械臂
王飛 夏百花


摘要:在嚴(yán)重事故、自然災(zāi)難的救援過程中,特別是救援人員無法進入的高危環(huán)境下,難免會遇到各種困難。為此基于危險性環(huán)境下的智能搶險裝置的設(shè)計很有必要。該文所設(shè)計的智能搶險裝置(搶險車)是基于危險情況下的復(fù)雜事故現(xiàn)場而研發(fā)。它能在危險環(huán)境中當(dāng)不了解內(nèi)部情況時代替救援人員進入現(xiàn)場進行勘察,使用自身攜帶的攝像模塊與熱紅外人體探測模塊所采集的數(shù)據(jù)第一時間傳輸給有關(guān)部門,同時可以進行一些簡單救援任務(wù)。
關(guān)鍵詞:高危環(huán)境;GPS;履帶式;液壓;機械臂
中圖分類號:TP18
文獻(xiàn)標(biāo)識碼:A
文章編號:1009-3044(2020)04-0176-02.
1 研究背景
隨著我國居民生活水平的不斷提高,汽車早已成為百姓日常出行的必備品。汽車給人們帶來便利的同時,也給人們帶來了很多問題。交通事故的發(fā)生,交通堵塞的出現(xiàn),這都會擾亂我們的生活。當(dāng)交通事故或者緊急情況發(fā)生時,救援人員卻因為堵車不能及時到達(dá)現(xiàn)場或者因為事故嚴(yán)重不能及時了解現(xiàn)場內(nèi)部情況無法確定受害人具體狀況,這個時候智能搶險小車就可以進人現(xiàn)場,及時傳遞現(xiàn)場信息,提供有利于救援信息。
在結(jié)合我們國家發(fā)生過的自然災(zāi)害,2008年的汶川特大地震和南方特大雪災(zāi)等自然災(zāi)害,都給當(dāng)?shù)厝嗣竦纳敭a(chǎn)安全造成重大傷害。當(dāng)這些自然災(zāi)害發(fā)生時因為救援工作無法及時展開導(dǎo)致的人員傷亡和損失無法估量。因此最大限度地降低自然災(zāi)害后因救援不及時而導(dǎo)致對人民生命財產(chǎn)安全造成的危害是迫在眉睫的。所以智能搶險裝置的有關(guān)課題研究十分重要。
2 系統(tǒng)設(shè)計
2.1 智能搶險裝置最小控制模塊的設(shè)計
使用STC89C52芯片作為本智能搶險裝置的主控芯片。STC89C52單片機是把控制指令等所必需的大部分內(nèi)容都集成在一個有限的尺寸集成電路芯片,上的邏輯控制器[1]。通過片內(nèi)的單一總線連接實現(xiàn)它們之間所有的聯(lián)系,其基本結(jié)構(gòu)為傳統(tǒng)的CPU加上外圍芯片的模式。因此要實現(xiàn)它對各路傳感信號進行采集、處理、分析及對各部分整體調(diào)制仍然需要外圍電路的協(xié)助來實現(xiàn)[2]。
2.2 智能搶險裝置電機驅(qū)動模塊的設(shè)計
如圖1為電機驅(qū)動模塊電路圖,該設(shè)計的運動輪是履帶式的,它可以在交通擁堵,救援人員無法快速到達(dá)的情況下,由救援人員操縱,趕赴現(xiàn)場。由于我們的裝置(搶險車)具有體積不大,操縱靈活的優(yōu)點,因此可以很快到達(dá)現(xiàn)場。它的前輪與
水平面呈45°角,具有很好的爬坡、跨越障礙物的能力,這樣就避免了很大程度受環(huán)境的影響。
2.3 L298N原理圖
在明確了電機驅(qū)動模塊電路以后,進一步要確定如何操作該模塊對電機的正反轉(zhuǎn)和停止,L298N模式選擇的控制方法如表1所示:
基于以上表格的控制方法,當(dāng)要求小車向前行駛時候只需要通過將單片機引腳置一個高電平和一個低電平,當(dāng)需要小車后退的時候只要將正轉(zhuǎn)的高低電平交換,當(dāng)需要小車停車則兩個輸入同時置低電平,由此實現(xiàn)了由L298N驅(qū)動救援車的
設(shè)計。
2.4 智能搶險裝置GPS系統(tǒng)
本裝置同時還加人了GPS外設(shè)模塊,它的型號為M8N。與普通GPS相比,此型號的GPS模塊具有高性能等特點,狹窄的都市天空下、密集的叢林環(huán)境等諸多地區(qū)此型號的該GPS都可以準(zhǔn)確地定位到。本裝置沒有在其內(nèi)部加人GPS而是采用了外設(shè)GPS模塊的原因是這樣可以使信號反饋數(shù)據(jù)更穩(wěn)定,從而使定位更準(zhǔn)確。
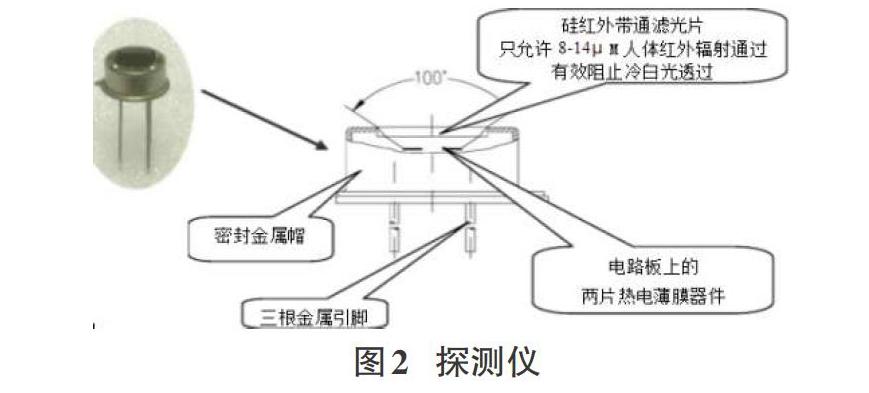
2.5 智能搶險裝置紅外人體檢測模塊
本裝置探測儀使用的是熱紅外線生命探測儀如圖2所示。熱紅外生命探測儀主要通過感知溫度差異來判斷不同的目標(biāo),因此在黑暗環(huán)境下也可同樣工作,紅外生命探測儀可以探測出傷員身體的熱量,接收器將接收到的人體熱輻射能量聚焦在紅外傳感器上后轉(zhuǎn)變成電信號,處理后經(jīng)監(jiān)視器顯示紅外熱像圖,從而幫助救援人員確定傷員的位置,及時傳送給救援人員。
2.6 智能搶險裝置機械臂模塊
三自由度的機械臂可以很好的完成救援工作。機械臂絕緣隔熱,可以幫助救援人員完成高危險的清障工作。圖3為智能搶險裝置機械臂模塊的流程圖。
2.6 智能搶險裝置液壓滅火模塊
該裝置具有一個液壓滅火裝置,可以對火情進行初步的撲滅。它是由中間靠軟管連接的兩個針筒組成,其內(nèi)部裝滿水,通過大扭矩舵機的扭動,產(chǎn)生液壓,推動手柄按下噴頭開關(guān),釋放水源滅火。
2.7 智能搶險裝置云臺及相機
該裝置外加了云臺模塊。它是安裝、固定攝像機的支撐設(shè)備。加入云臺的原因在于安裝固定攝像機,且安裝之后能在外界控制下做水平和垂直轉(zhuǎn)動,使攝像機有更大的攝取范圍可以更好地觀察目標(biāo),最終可以將救援人員看不到的現(xiàn)場內(nèi)部情況及時傳輸出來,方便救援。
3 結(jié)論
本裝置的應(yīng)用對于在一些特殊地理位置發(fā)生的交通事故、救援活動緊急、救援環(huán)境惡劣、地震等特殊緊急事故有著極大的幫助。在面對以上緊急救援情況時,本裝置在收到指示命令信號后,會根據(jù)GPS定位迅速到達(dá)現(xiàn)場,對現(xiàn)場情況有個全面的反饋。它有著更快了解、更少救援人手、更強的救援措施以及可以在危險環(huán)境下救援人員無法進人的惡劣環(huán)境工作的優(yōu)點。利用其上安裝的生命探測儀外設(shè),對搜救的目標(biāo)就行探測,對于接下來的營救行動有著很大的指導(dǎo)幫助。
參考文獻(xiàn):
[1]秦曾煌.直流穩(wěn)壓電源.電子技術(shù)[M].北京:高等教育出版社,2010:21.
[2]何希才.常用傳感器應(yīng)用電路的設(shè)計與實踐[M].北京:科學(xué)出版社,2007:33-42.
[3]孫肖子,易運輝.電子設(shè)計指南[M].北京:高等教育出版社,2006:33-40.
[通聯(lián)編輯:唐一東]
猜你喜歡
科技與創(chuàng)新(2016年23期)2017-03-30 04:12:23
中國科技縱橫(2017年3期)2017-03-29 18:50:48
山東工業(yè)技術(shù)(2017年4期)2017-03-28 07:56:48
求知導(dǎo)刊(2017年1期)2017-03-24 22:25:58
物聯(lián)網(wǎng)技術(shù)(2017年2期)2017-03-15 17:04:47
中國科技博覽(2016年27期)2017-01-23 01:32:28
農(nóng)機使用與維修(2016年12期)2017-01-17 15:23:12
安徽理工大學(xué)學(xué)報·自然科學(xué)版(2016年1期)2016-12-14 22:15:06
計算機教育(2016年7期)2016-11-10 09:01:27
中國科技博覽(2016年9期)2016-04-25 10:13:28
