全景攝錄系統的設計與實現
2020-04-14 04:54:29喬軼
電腦知識與技術 2020年4期
喬軼


摘要:在工作中,高速運動物體和目標遭遇端是無人看管的環境,并且對所獲取的圖像的快速處理標準相對較高。基于此本文設計了一套具備360°監視視角的全景高速實況攝錄系統。文中給出了系統組成以及工作流程,并對相機觸發、圖像處理、視頻傳輸方面的關鍵技術進行了討論。實驗證明該系統完整獲取了目標遭遇過程中視頻信息,對目標遭遇段精準測量工作具有重要的現實意義。
關鍵詞:圖像傳輸;準實時;精確觸發;環形成像;成像恢復
中圖分類號:TP311文獻標識碼:A
文章編號:1009-3044(2020)04-0231-02
收稿日期:2019-11-21
Design and Implementation of Panoramic Video Recording System
QIAO Yi
(Team 43 Unit 91550,Dalian 116023,China)
Abstract:High-speed hitting target is unattended and requires high processing speed to obtain images.So we design a target ship's monitoring system which the visual angle is 360 degrees.In this paper,first introduces the system composition and work flow,then dis-cusses the key technologies of camera triggering s image processing and video transmission.Finally,through the experiment we prove that the system can acquire the video information during the target encounter process,which has important practical significance for the accurate measurement of the target encounter segment.
Key words:image transmission;pseudo-realtime;trigger precisely;Annular imaging;mage restoration
1 概述
實驗測試中,該系統主要負責攝錄工作,其為測試飛行器的各項性能指標提供技術支撐[1-2]。介于實際實驗中,飛行器的最終落點難以預測,這就需要攝錄設備在攝錄范圍為整個遭遇區域。為了滿足拍攝范圍要求,通常同時設置多個攝像機進行拍攝。本文采用全景成像技術[3],使用一臺攝像機,就可滿足對整個遭遇區域的全視場觀測要求[4]。高速運動目標和目標遭遇過程可以表現出整個實驗的各種性能,因此它的圖像信息的實時采集以及傳輸,在對運動物體實時飛行姿態、遭遇點精度判斷以及實驗結果的有效性判定等方面起到了關鍵性作用[5]。
2 設計方案
2.1 系統組成
該系統主要用來實現遭遇點周圍全方位成像,完成實驗視頻圖像的獲取和傳輸。主要由視頻記錄系統、遙控地面站和圖像處理系統組成。攝錄系統主要由高速攝錄機以及攝錄機的控制單元,聲觸發單元、圖像數據存儲單元等[6-7]。地面站由遙控站主機、監控系統、視頻格式轉換器及相對應的饋線等構成,用于實現攝錄系統的遠程遙控,同時對整個系統地實時運轉、工作狀態進行不間斷監控;圖像數據處理單元由圖像控制系統以及實時處理軟件等組成,主要用于實現對實驗圖像的解析、處理及傳輸顯示工作[8-9]。
2.2 工作流程
實驗中,該系統布設于目標遭遇點一定距離內,通過4 Mb/s無線信道完成其和地面間的通信工作。當飛行器出現在測試區時,系統利用空氣摩擦以及遭遇時刻產生的強聲壓信號觸動攝錄系統開始工作,地面站完成所有監控后,依據聲觸發時段選取一段連續圖像,并開啟編碼壓縮以及圖像匯編工作,接收高速慢放視頻并發送到指定位置。
3 成像系統技術實現
成像系統主要由雙曲面反射鏡、高速CMOS相機和全景取景器等組成[10]。電纜和光纖使用NI公司基于Channel Link技術開發的總線協議,有效地解決了相機與其圖像采集卡之間高速通信的問題。雙曲面反射鏡用來完成對遭遇段物體的成像作用,使相機達到實驗所需可視視場的范圍。
3.1 攝錄系統的觸發
本文中使用拍攝幀率≥500fps,分辨率≥1024x1024的攝錄系統,假設目標從視場到遭遇段需要100ms,則得到的高速圖像幀的數量是50幀。手動操作無法達到如此精確的控制要
求,并且針對實際工作中對實時性的較高要求以及圖像識別法:的復雜性,因此只能依靠外觸發控制。
在實驗中,當處理高速運動目標的聲學特性數據時,發現在運動期間遭遇點處產生的聲壓信號強度要大于空氣摩擦產生的聲壓信號,空氣摩擦產生的聲壓信號要遠遠大于背景噪聲,且遭遇點處的聲壓信號穩定、易于識別。綜上所述,本系統使用基于聲壓的觸發控制單元觸發攝錄系統,此外該系統還具有自動識別目標遭遇時刻的功能。
3.2 圖像處理
(1)圖像的柱面展開
為實現對飛行物體在遭遇段實況的詳細分析,需要對獲取的圖像進行圖像處理,以獲得更多的信息。
如圖2所示,以虛擬相機投影中心E為原點建立坐標系,得到雙曲面反射鏡的面型表達式:
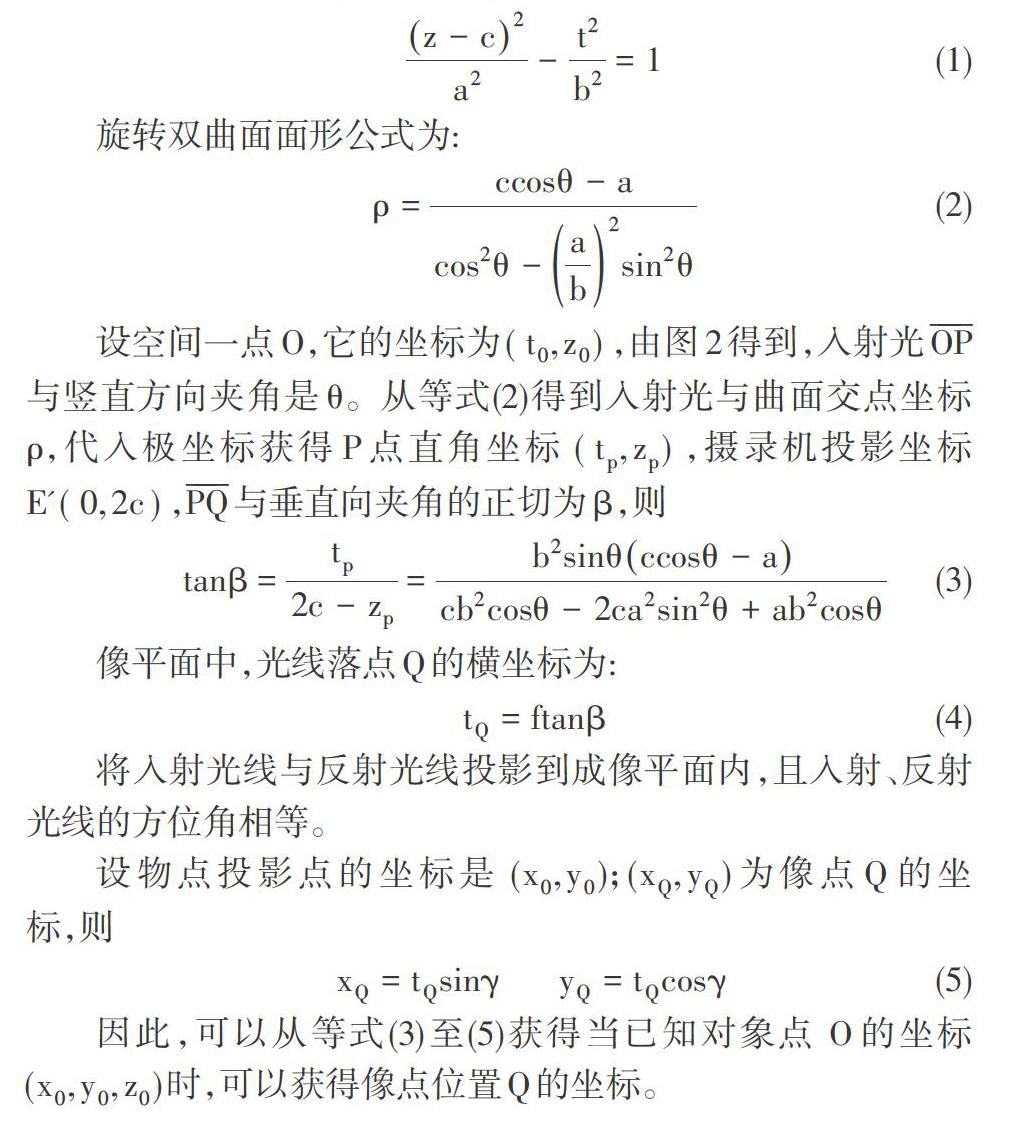
旋轉雙曲面面形公式為:
設空間一點0,它的坐標為(to,zo),由圖2得到,人射光OP與豎直方向夾角是θ。從等式(2)得到人射光與曲面交點坐標.ρ,代人極坐標獲得P點直角坐標(t,z,),攝錄機投影坐標E(0,2c),PQ與垂直向夾角的正切為β,則
像平面中,光線落點Q的橫坐標為:
將入射光線與反射光線投影到成像平面內,且人射、反射光線的方位角相等。
設物點投影點的坐標是(xo,yo);(xq,yq)為像點Q的坐標,則
因此,可以從等式(3)至(5)獲得當已知對象點0的坐標(xo,yo,zo)時,可以獲得像點位置Q的坐標。
(2)圖像的后期處理
系統因各種外界因素影響,在獲取或者傳輸中會產生各種不同程度的噪聲。基于工作中對圖像結果要求的不同,如果采用一般去噪法會出現元素圖像連接處模糊的現象。因此本文采用基于元素圖像的局部去噪法,既對每個元素圖像進行局部區域去噪,同時為保證各個元素圖像邊緣不受相鄰元素值的干擾,當濾波靠近相鄰元素圖像邊界時,采用將邊緣像素復制于圖像之間的邊界方法,以達到消除模糊的目的。經過以上處理.的圖像數據,再重構三維視圖時,具有良好的視覺效果。
此外,介于全景成像分辨率不均勻的特點,為實現細節化的復原原圖像,文中利用插值手段達到圖像分辨率均勻的目的。其中形變方面我們通過切線、徑線方向線性化得到解決。通過將環形圖像擴展成矩形圖像來實現切線方向的線性化。具體步驟為將環形像沿著外圓周展開,沿著圓周運動360°回到起始點,縮小半徑,重復上述步驟直到完成圖像的線性化。既將上述步驟的每個圓周映射為矩形像的一條直線。徑向的線性化通過系統校準完成。在本文中,我們使用等間距的網格:圖,既根據豎線間距,使已經線性化水平線實現等間距分布。
圖像經校正后,像點不是落在坐標點上,因此還需重采樣處理。重采樣像素灰度可根據周圍像素灰度及權函數插值獲得。本系統采用三次卷積法,此法雖然計算速度慢,但是與其他兩種方法相比較,可以更好地保持圖像的高頻信息。
3.3 視頻的傳輸
介于系統傳輸距離遠、傳輸數據量大、速度快的特點,首先將Cameralink接口的LVDS信號轉換為光信號,并通過光纖轉換器將其傳輸到視頻數據存儲系統內,實現視頻地傳輸。
4 實驗及結論
該系統在傳輸距離為20km且無線通信帶寬為4Mb/s的條件下通過實驗驗證。實驗中使用聲壓超限信號實現了相機的觸發,完成了對視頻信息的準實時傳輸,時間延遲為53s。
目前,該系統已經通過實驗測試,測試數據表明系統成像質量良好,滿足使用要求,達到了預期效果。該技術在未來其他無人遠程遙控實況監視背景下具有很大的應用前景。
參考文獻:
[1]肖瀟,楊國光.全景成像技術的現狀和進展[J].光學儀器,2007,29(4):84-89.
[2]穆原子,丁力軍.武器裝備試驗靶標建設與發展研究[J]國防科技,2013,343):40-43.
[3]宇.全景成像的計算機重構技術[D].長春理工大學,2010:50-65.[4]張三喜,姚敏,孫衛平.高速攝像及其應用技術.北京:國防工業出版社,2006:27-34.
[5]張榮文.基于Motion-JPEG2000的遠程圖像傳輸技術研究[J].艦船電子工程,2013:33-36.
[6]張志.就業圖像監視的高速攝像自動觸發系統研究[D].國防科技大學2009:18-20.
[7]萬登峰.JPEG2000遙感圖像壓縮的應用研究[D].碩士學位論文,上海交通大學.2005:23-25.
[8]劉巖俊.圖像存儲與實時顯示系統設計與實現[J].電子測量技術.2015(5):45-49.
[9]T.Svoboda.Central Panoramic Cameras Design,Geometry,Egomotion[D].phDthesis,Czech technical University.1999.
[10]曾吉勇,蘇顯渝.雙曲面折反射全景成像系統[J].光學學報,
2003,23(9):1138-1142.
[通聯編輯:梁書]
