基于GPS/BDS的大壩安全監測試驗與分析
2020-04-15 05:54:56葛山運
中國農村水利水電 2020年1期
關鍵詞:系統
葛 山 運
(重慶工程職業技術學院測繪地理信息學院,重慶 402260)
0 引 言
截至2018年底,我國已建各類水庫98 460 座,水庫總庫容達到8 764 億m3,大壩作為水庫的擋水建筑物,不僅能夠調控水資源時空分布,而且對水資源的優化配置和防洪減災起到很大作用[1]。據2018年水利部統計,我國大中型水庫大壩安全達標率為95.2%,盡管總體情況較好,但仍有部分水庫大壩由于受洪水、地震、滑坡等自然因素以及勘測設計缺陷、施工質量漏洞、運營管理不到位等人為因素影響而存在安全隱患或安全事故[2]。水庫大壩安全運營不僅關乎水庫工程綜合效能的發揮,而且涉及壩區下游人民的生命財產安全,一旦發生潰壩事故,將造成不可估計的損失。
大壩安全監測,是指通過專業儀器設備和人工巡視對大壩自身及其周圍環境量進行測量和觀察的工作[3],常用的儀器設備包括全站儀、測縫計、沉降儀、測斜儀、溫度計、壓力計及各類接收儀表等。以往水電站大壩外觀安全監測主要采用前方交會法、視準線法、引張線法和水準測量法等傳統技術方法[4],這些測量方法監測頻率通常每月一次,具有步驟繁瑣、自動化程度低、耗時費力,易受人為因素干擾、內業數據繁冗,處理復雜易出錯等缺點,無法滿足快速、動態監測大壩變形的要求。
近年來,隨著全球衛星導航系統(Global Navigation Satellite System,GNSS)的發展,GNSS技術憑借其高精度、全天候、實時動態等特性在獲取物體動態位置、監測物體動態變化等方面具有很好的應用效果,被廣泛用于大壩安全監測[5,6],對確定大壩健康狀態和保證大壩安全運營具有重大意義。以往研究只是采用GPS單系統對大壩進行周期性靜態觀測[7,8]或基于GPS-RTK模式對大壩進行實時監測,而BDS的衛星性能和測距精度又與GPS基本相同[9],但對BDS在大壩安全監測中的應用研究甚少,且大壩具有四周多山的特點,利用單一GNSS系統往往會因為周圍山體遮擋而無法保證其監測精度。此外,RTK模式由于其受限于平面1~2cm以及高程3~5cm的測量精度,致使對常規運營期大壩短期小幅度mm級變形監測無從為力。本文基于以上問題,以瑯琊山抽水蓄能電站大壩作為研究對象,充分利用BDS資源,開展基于GPS/BDS的大壩安全監測可行性研究,嘗試采用GPS/BDS觀測數據的連續準靜態模式對大壩進行安全監測,并對其監測結果進行深度分析,得出了一些有益的結論。
1 監測點布設與監測基準
1.1 瑯琊山抽水蓄能電站大壩概況
安徽瑯琊山抽水蓄能電站位于長江支流青弋江上,是一座以防洪、發電、供水為主,兼有航運等綜合效益的水電站,建設耗資巨大,歷經復雜地質條件、變壓器設計與安裝等重重困難成功運營,機組總容量高達60 萬kW,年發電量約8.6 億kWh,上庫主壩采用鋼筋混凝土面板堆石壩,壩頂高程174 m,壩頂長度655.5 m,最大壩高64 m。副壩采用混凝土重力壩,壩頂高程173 m,壩頂長度327 m,最大壩高19.4 m。
1.2 監測點布設
如圖1所示為瑯琊山水電站監測點布設示意圖,圖中LY05和LY06為監測基準點(基準點連線與大壩的壩軸線平行),S01和S02為上游監測點,S03和S04為下游監測點,JH01和JH02為校核基點。本文基于雙基準站策略進行試驗,分別將大壩穩定的基巖點LY05、LY06作為主基準站和輔助基準站,S01、S02、S03、S04作為監測站,為便于后期坐標轉換,在JH01、JH02同樣安置GNSS接收機,接收機類型為Lecia 1200測地型雙頻GNSS接收機,數據采樣頻率設置為1 s,衛星截止高度角設置為15°。
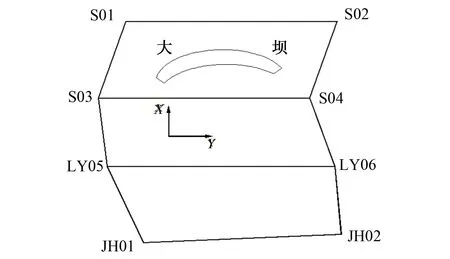
圖1 監測點布設示意圖
1.3 監測基準
將基準站LY05、LY06以及JH01、JH02與瑯琊山水電站附近的BJFS、XIAN、WUHN、SHAO、SUWN共5個IGS參考站進行聯測,獲取上述站點在ITRF2014框架、2019.1644(2019-03-01)歷元下的坐標,聯測的IGS參考站與基準站的相對位置如圖2所示。
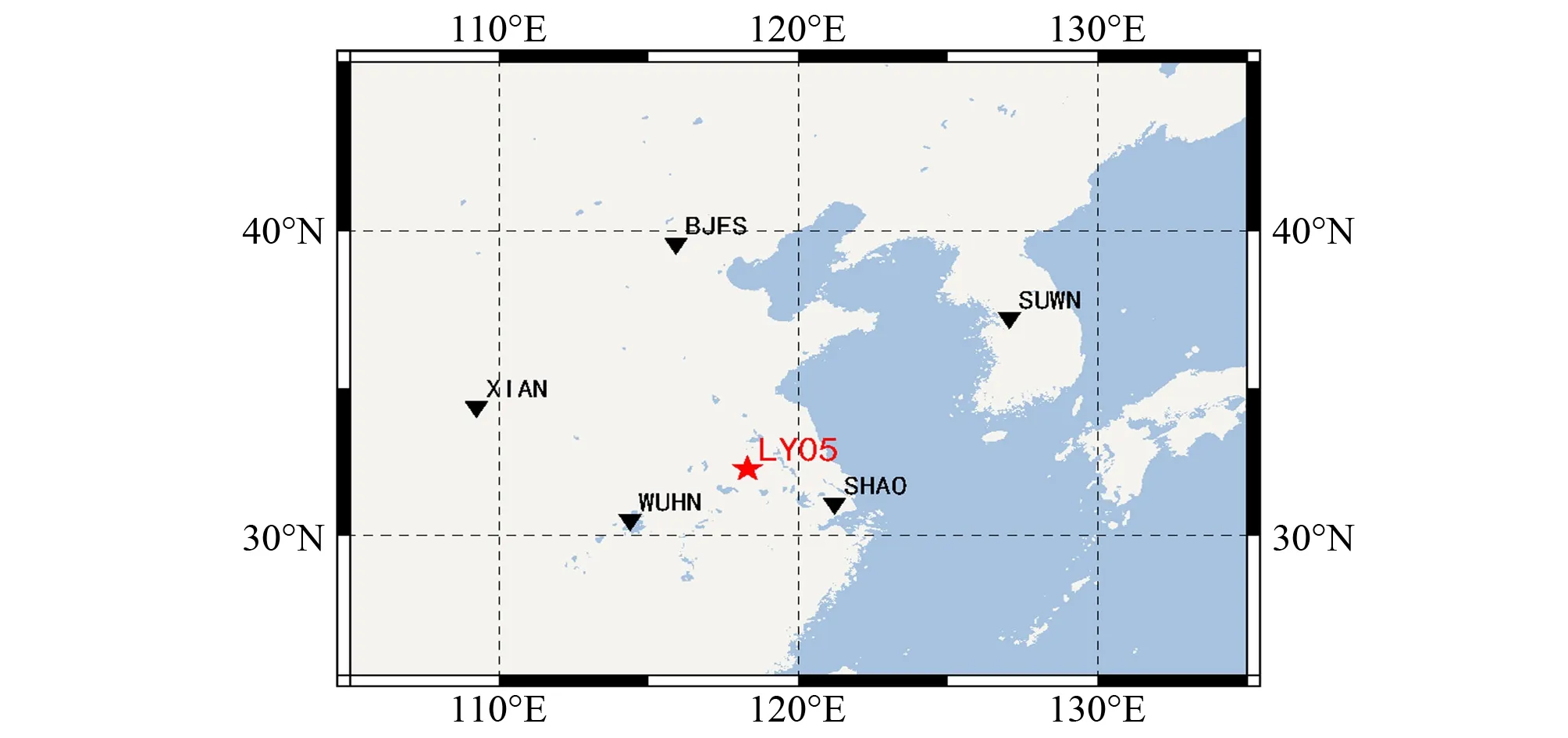
圖2 監測基準與聯測的IGS參考站分布圖
2 監測數據處理與坐標轉換
2.1 監測數據處理
采用GAMIT10.7軟件對大壩GNSS監測網進行基線解算,基線解算時需在sestbl.、sittbl.、sites.defaults、process.defaults控制文件中設置解算策略[10]。以基準站LY05和LY06作為解算的起始點,通過sittbl.控制文件對基準站的X、Y、Z坐標分別設置3、3、5 cm的約束量,且對監測點的X、Y、Z坐標也分別加入5、5、5 m的約束量;通過process.defaults控制文件將監測點的歷元間隔與基準站的歷元間隔統一為10 s;在sestbl.控制文件中將衛星截止高度角設置為15°,基線解算模型設置為RELAX松弛解(即同時解算基線和軌道),基線解算類型設置為“2-iter”(即對測站坐標進行2次迭代),基線觀測值類型設置為適合于中長基線的LC_HELP(即使用電離層約束求解寬巷模糊度的LC解,進而抵抗電離層折射誤差),干濕延遲模型均采用Saastamoinen模型,干濕映射函數均采用目前精度較高的維也納映射函數1(VMF1)。此外,使用參數間隔在4~7 h范圍內的PWL分段線性法[11]對測站天頂方向的對流層濕延遲參數進行估算,估算結果可以減弱對流層折射誤差對地鐵控制網基線解算的影響;基線解算時將gpt.grid文件代入一起解算,該文件是全球氣壓和溫度模型文件,GAMIT軟件可以采用內插的方法從該模型文件中計算測區的氣壓和溫度。
基準站距離所有監測點不超過5 km,因此上述基線解決方案理論上可以滿足大壩安全監測mm級的精度要求,基線解算時每個監測點都按GPS單系統、BDS單系統和GPS/BDS組合系統共3種方案進行數據解算,最后根據聯測的基準站坐標,結合基線解算結果計算各監測點在ITRF2014框架下的三維空間直角坐標。
2.2 坐標轉換
監測點坐標解算結果位于ITRF2014參考框架,大壩安全監測分為水平位移監測和垂直位移監測,為更好的觀察水電站在抽水和蓄水過程中產生的幾何變形,因此分別以壩體縱向、壩軸線方向作為X軸和Y軸建立瑯琊山水電站壩軸獨立坐標系,而對于監測點在豎方向的變化本文則直接采用WGS-84橢球大地高。
基于CGCS2000橢球參數[12],將各監測點在ITRF2014框架下的三維空間直角坐標(X,Y,Z)轉換為CGCS2000橢球下的大地坐標(B,L,H):
(1)
式中:N為卯酉圈曲率半徑;e為橢球第一偏心率。
以CGCS2000橢球為基準,選擇測區平均高程作為高程投影面,利用測區中央子午線將各點坐標投影至國家標準3°帶,選用LY05、LY06基準點作為坐標轉換的公共點,通過四參數坐標轉換模型計算國家標準3°帶高斯直角坐標系與瑯琊山水電站平面控制網采用的LYHPS坐標系之間的轉換參數,事后采用JH01、JH02作為檢核點,檢核點轉換殘差均為mm級。四參數坐標轉換模型為[13]:
(2)
式中:m為尺度比縮放參數;α為旋轉參數;x0、y0為平移參數。
基于平面坐標轉換參數將監測點的高斯直角坐標轉換為LYHPS平面坐標,而LYHPS平面坐標系與瑯琊山水電站壩軸獨立坐標系只存在一定的旋轉關系,不存在平移和尺度比關系,因此可通過下式將監測點的LYHPS坐標轉換為壩軸坐標:
(3)
式中:β為LYHPS坐標系與瑯琊山水電站壩軸獨立坐標系之間的旋轉角,可以通過基準點LY05、LY06在LYHPS坐標系下的坐標反算其坐標方位角而得。
3 大壩安全監測結果與分析
3.1 衛星連續可用性與PDOP值分析
圖3為2019年3月1日S01監測點GPS、BDS、GPS/BDS共3種模式下的可見衛星數量,圖4為3種模式下的PDOP值。分析圖3和圖4可知,與BDS單系統和GPS單系統相比,GPS/BDS組合系統增加了衛星數量、降低了PDOP值,有效提高了觀測精度。同時,大壩上空BDS含有與GPS相當的9顆可見衛星,但BDS的PDOP值卻大于GPS,究其原因是現階段北斗系統的GEO/IGSO、GEO和IGSO主要覆蓋亞太地區,其監測站的開放度分布相對不及GPS。由圖4可知BDS單系統的PDOP值存在較大抖動,主要原因是相應時間內的所有IGSO都位于觀測站點的南部。
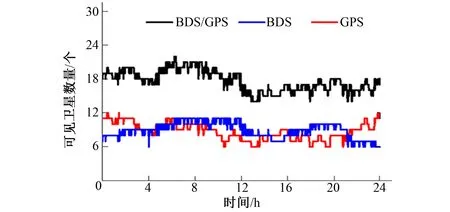
圖3 S01監測點單系統與組合系統可見衛星數量
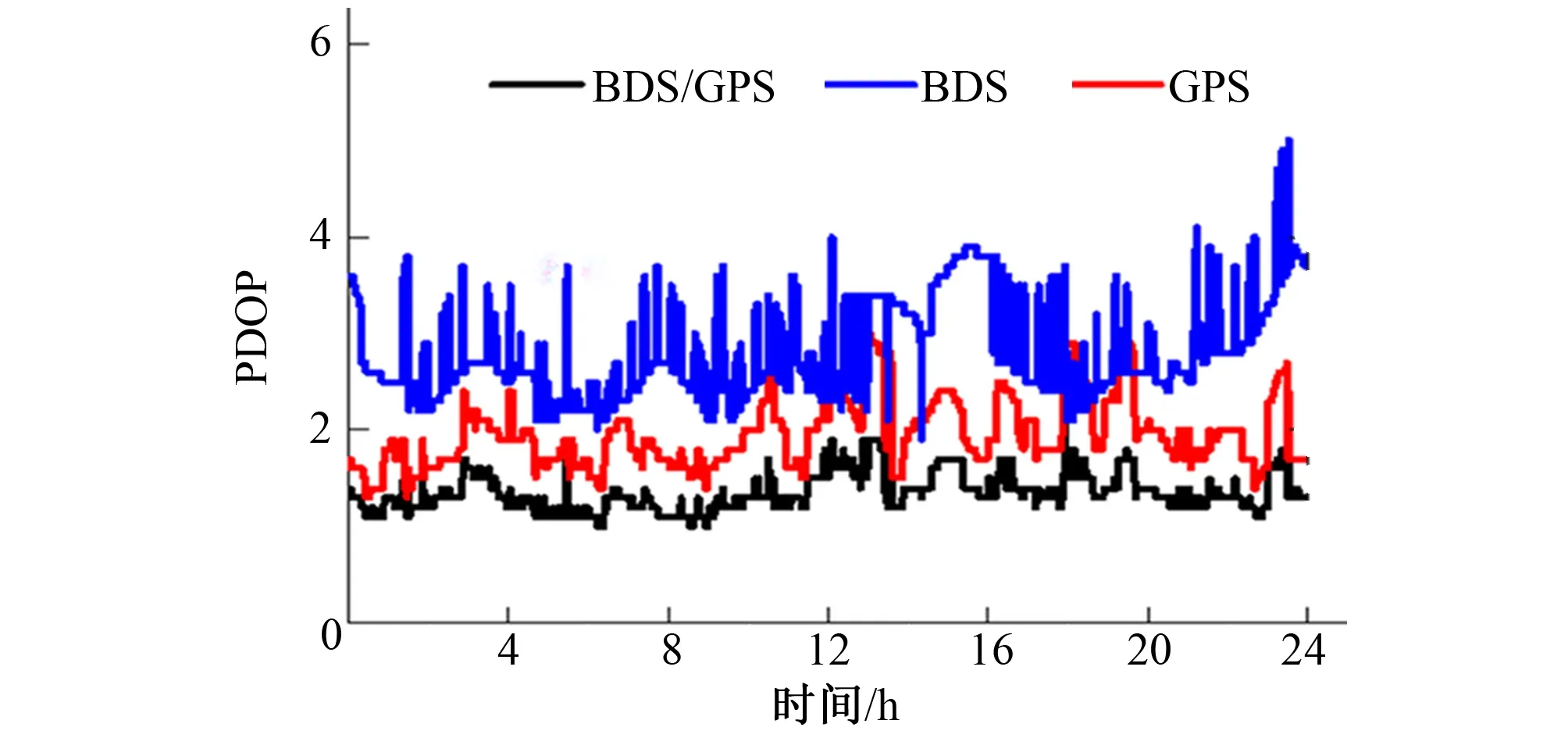
圖4 單系統與組合系統PDOP值
3.2 單日有效解時段數分析
圖5給出了2019年3月1日所有監測點GPS、BDS、GPS/BDS共3種方案一天內的有效解時段數。分析圖5可知,GPS/BDS組合系統的有效解時段數與GPS單系統的有效解時段數相當,除S02監測點外,其余監測點的GPS/BDS有效解時段數量均超過93%,而BDS單系統有效解時段數最大僅為S01監測點的79%,最小為S02監測點的24%,究其原因是S02監測點的天線一側被山體遮擋,因此接收衛星信號時受到了嚴重影響,但此時采用GPS/BDS組合定位對大壩進行安全監測的優勢是顯而易見的。對于其他衛星信號接收良好的監測點,GPS/BDS組合系統和GPS單系統的有效解時段數大致相同。
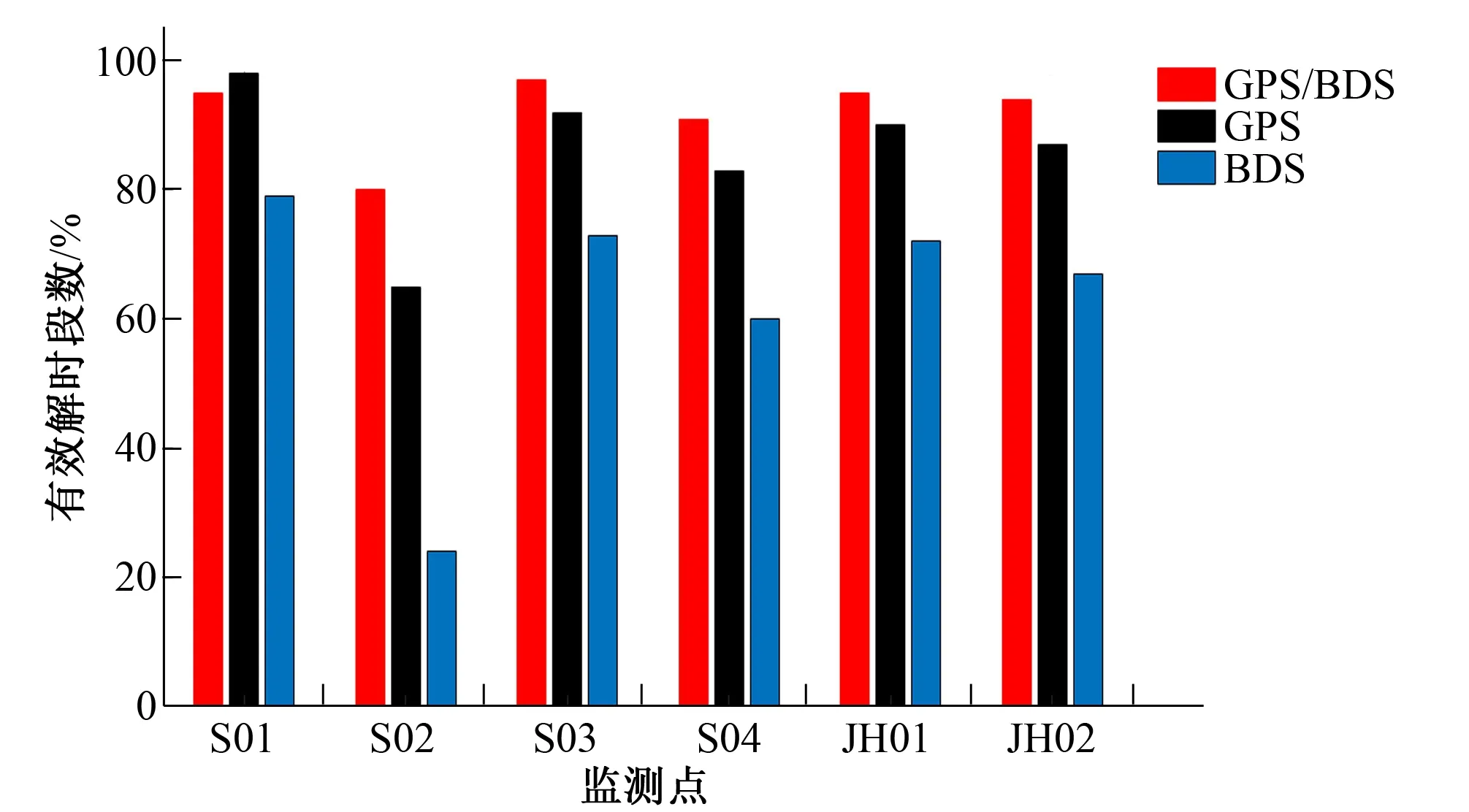
圖5 監測點GPS、BDS、GPS/BDS單日有效解時段數量對比
3.3 安全監測坐標序列分析
為了分析GPS/BDS組合定位在大壩安全監測中的應用效果,計算所有監測點在GPS/BDS組合定位連續準靜態模式下的坐標序列,限于篇幅,本文以S01監測點在第60年積日的監測數據作為研究對象,以1 s采樣間隔通過上文所述方法解算該點第1 h內監測的3600組位于壩軸坐標系下的坐標序列,只保留監測點坐標mm位的X、Y、H坐標序列結果如圖6所示。分析圖6可知,與Y、H方向相比,監測點X方向在初始階段的波動幅度小,但經過30 min的初始測量后,監測點在X、Y、H三個方向均只存在mm級波動,坐標序列趨于穩定。
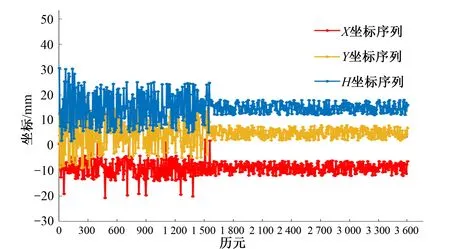
圖6 監測點第1 h內的監測坐標序列
對S01監測點第60年積日24 h觀測數據進行粗差剔除[14]與卡爾曼濾波[15],如圖7所示為取單個小時數據均值作為1 h監測結果的坐標序列。分析圖7可知,監測點在X、Y、H方向的1 h坐標序列均在mm級范圍內波動,其中X方向最小值為-11.5 mm、最大值為-3.4 mm,最大互差優于8.1 mm;Y方向最小值為-7.9 mm、最大值為5.3 mm,最大互差優于13.2 mm;H方向最小值為-7.4 mm、最大值為4.7 mm,最大互差優于12.1 mm。
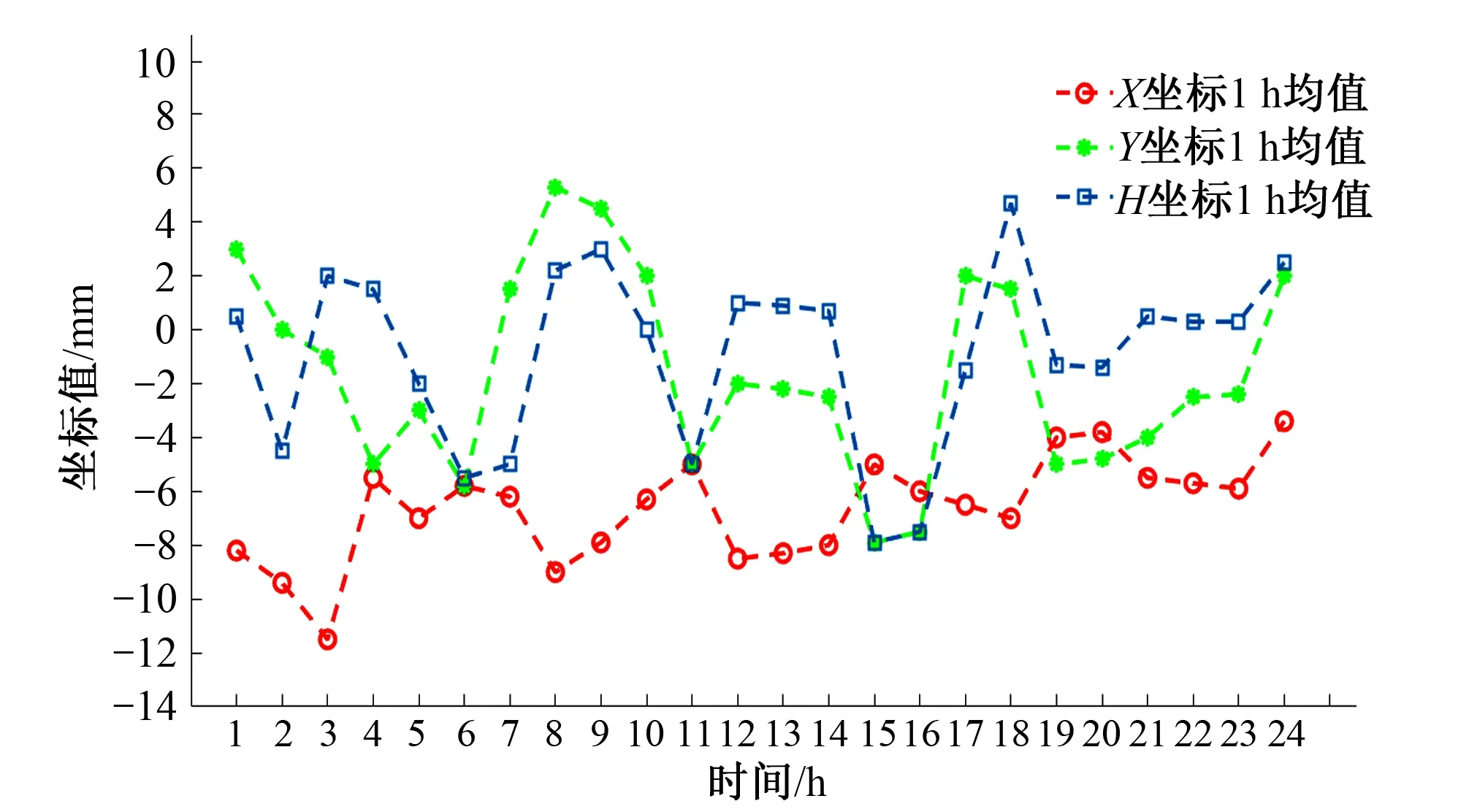
圖7 S01監測點1 h均值坐標序列
為了探究基于GPS/BDS組合定位的大壩安全監測穩定性與時間的關系,計算S01監測點第60年積日從第1 h到第24 h的均值,結果如圖8所示。分析圖8可知,基于GPS/BDS組合定位獲得的大壩安全監測坐標在初始時間內會存在一定的波動現象,但在達到2 h的穩定監測時長后便可獲得2 mm左右的點位精度,且組合定位精度隨著觀測時間的增長也在不斷提高,X方向監測結果在從第1 h取至第4 h時的均值可以穩定在1 mm,而Y方向和H方向則需從第1 h取至第10 h時的均值方可穩定在1 mm。
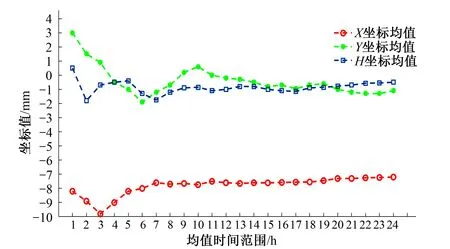
圖8 S01監測點由1至24 h內的均值坐標序列
3.4 GPS/BDS監測靈敏度分析
為了研究GPS/BDS組合定位在大壩安全監測中的靈敏度,設計了如圖9所示的帶有游標卡尺的可移動基座架,該基座架相當于一個可移動的觀測墩,通過將基座向某一方向滑動特定的距離實現監測點的變化。
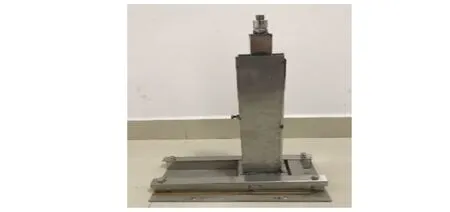
圖9 可移動基座架
將可移動基座架安置在S01監測點附近的巖體處,共進行6次特定距離的基座架滑動實驗,滑動基座架時通過游標卡尺記錄其滑動距離,分別為1.00、6.70、9.40、21.95、37.50和57.10 mm,滑動時以1 s采樣間隔連續不斷的接收24 h數據,觀測結束后對單天24 h監測數據進行濾波處理,取其均值作為滑動特定距離后的(X,Y,H)坐標值,然后計算初始未滑動基座架時的監測點坐標與滑動基座架特定距離后的監測點坐標的差值,進而獲得距離變化量,其結果統計如表1所示。
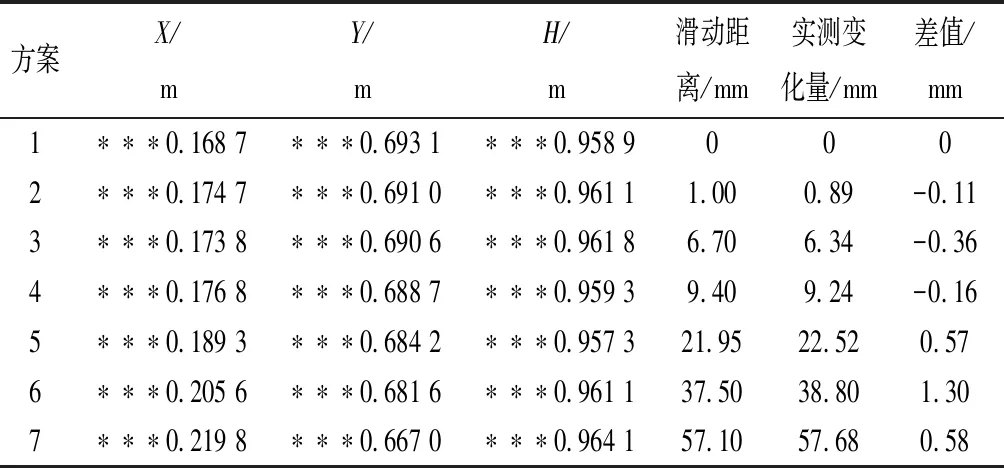
表1 靈敏度測量統計結果
注:***代表監測點坐標的前3位數字,且前3位數字保持一致。
表1中的滑動距離是指用游標卡尺測量的可移動基座架滑動距離,實測變化量是指將可移動基座架滑動后測量的三維坐標值與初始坐標作差而得到的距離變化量。分析表1可知,除第6次試驗外,其余試驗的實測變化量與設計值的差值優于1 mm,表明GPS/BDS組合定位在大壩安全監測中具有很好的靈敏度,而對于第6次試驗的差值1.30 mm,究其原因是當天測量環境風雨交加,在一定程度上對支架的穩定性產生了影響。
為了探究基于GPS/BDS組合定位的大壩安全監測靈敏度與時間的關系,以1 h作為間隔計算24 h內的實測距離與滑動距離,結果如圖10所示。
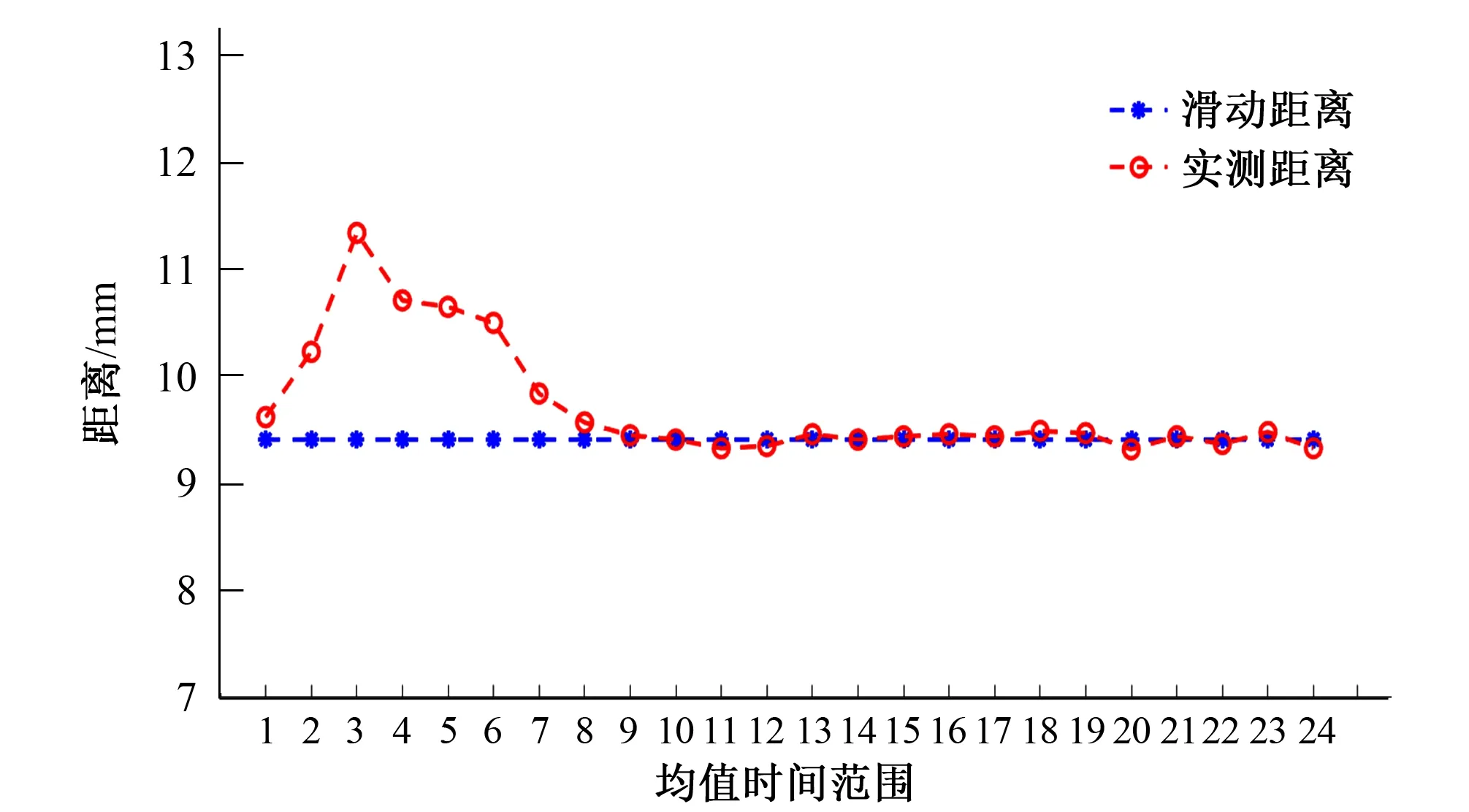
圖10 靈敏度測量統計結果
分析圖10可知,前7 h的監測結果數據有所波動,但與實際滑動距離相比監測結果仍可保持mm級精度,而第7 h后的實測距離和設計滑動距離基本吻合,差異優于1 mm。
4 結 論
本文以瑯琊山水電站實測動態監測數據作為研究對象,驗證了基于GPS/BDS組合定位的連續準靜態模式在大壩安全監測中的可行性和可靠性,主要研究結果如下:
(1)基于GPS/BDS組合定位的大壩安全監測結合了GPS和BDS系統豐富的數據資源,改善了大壩天頂衛星空間分布的幾何結構。
(2)當大壩處于復雜環境條件下,特別是當衛星信號受到嚴重影響時,基于GPS/BDS組合定位進行大壩安全監測與單系統相比具有明顯的優勢,能實現快速、準確獲取高精度大壩監測點三維空間位置信息。
(3)基于GPS/BDS組合定位獲取的大壩監測點坐標序列存在規律性的波動,通過一段時間的初始測量可獲得mm級的穩定監測數據。此外,通過對監測坐標序列進行均值處理,X方向在4 h后可收斂至1 mm,Y方向和H方向在10 h后可收斂至1 mm。
(4)通過設計的可移動基座架探究了GPS/BDS組合定位在大壩安全監測中的靈敏度,試驗結果表明基于GPS/BDS組合定位的大壩安全監測靈敏度可達到mm級,當在連續準靜態模式下觀測7小時后其靈敏度優于1 mm,因此基于GPS/BDS系統的大壩安全監測應以7 h作為控制。
以上研究成果驗證了GPS/BDS組合定位在連續準靜態模式下通過一段初始測量后可以實時獲取穩定的大壩監測數據,滿足大壩變形mm級的監測要求,且能如實反映大壩監測點的變形情況,具有很強的推廣應用價值。
□
猜你喜歡
工業設計(2022年8期)2022-09-09 07:43:20
軍民兩用技術與產品(2021年10期)2021-03-16 06:05:30
北京測繪(2020年12期)2020-12-29 01:33:58
裝備制造技術(2019年12期)2019-12-25 03:06:46
制造技術與機床(2019年10期)2019-10-26 02:47:06
中國洗滌用品工業(2019年4期)2019-05-11 09:27:34
鐵道通信信號(2018年5期)2018-06-28 03:06:24
家庭影院技術(2017年9期)2017-09-26 03:41:45
知識經濟·中國直銷(2017年5期)2017-06-15 20:28:19
通信電源技術(2016年6期)2016-04-20 06:21:32