彈性尾緣對超空泡航行體空泡形態與壓力脈動特性影響的水洞試驗研究
2020-04-16 01:38:56侯東伯王聰夏維學李宜果趙靜
兵工學報 2020年3期
侯東伯,王聰,夏維學,李宜果,趙靜
(1.哈爾濱工業大學 航天學院,黑龍江 哈爾濱 150001;2.中國運載火箭技術研究院 研究發展中心,北京 100076)
0 引言
超空泡航行體在水下高速運動過程中,由于彈體全部或部分被包裹在空泡內,在減小阻力的同時也失去了部分可控水動力的作用,使得航行體受到強非線性流體動力的作用,大大增加了超空泡航行體運動控制的難度,因此水下航行體空泡的生成、發展與控制成為超空泡航行體研究的關鍵問題之一[1-2]。空泡形態的改變影響著航行體的沾濕區域,進而改變其動力特性。對于空泡形態特性問題,Savchenko[3]和Savchenko等[4]根據空泡形態與空泡閉合位置提出了高速運動航行體在空泡包裹下的4種運動模式;Ota等[5-6]利用空化水洞進行試驗,針對不同攻角、不同空化數和雷諾數情形研究了空泡流特性,并測量了模型表面的壓力;賈力平等[7]通過試驗方法研究了空化器參數對形成超空泡臨界空化數和通氣系數門限值的影響;方城林等[8]通過數值模擬方法分析了射彈頭型對空泡形態演化過程、射彈流體動力及彈道特性的影響規律;路麗睿等[9]通過開展不同頭型射彈低速傾斜入水試驗,研究了射彈頭型對入水空泡、運動速度、俯仰角和阻力系數的影響規律;鄧飛等[10]提出了一種應用于水下射彈的雙圓盤空化器,并在高速循環水洞中對其空泡生成特性和形態特性進行了實驗研究;王威等[11]通過數值模擬研究了陣風流作用下通氣超空泡形態的變化特性。
有效控制空泡形態對于預估航行體的動力特性具有重要意義。白濤等[12]采用水洞實驗方法獲得了超空泡航行體模型在空化器角度變化時的超空泡形態和超空泡內外壓力數據;Wang等[13]設計了水洞試驗,對帶有不同角度空化器的模型進行了測試,設計了超空泡航行體的控制規律并給出了仿真驗證;周后村等[14]基于有限體積法,研究了超空泡航行體在不同空泡流型及不同控制面舵角情況下控制面與主空泡之間的相互作用;裴譞等[15]通過縮比模型試驗對通氣超空泡的生成和尾翼舵角的力學特性進行了研究,獲得了尾翼舵角對升力的影響規律及尾翼舵效隨攻角和通氣量變化的規律。目前對超空泡航行體的控制主要通過空化器攻角以及航行體尾部控制面舵角的改變來實現,缺少航行體尾部彈性尾緣對超空泡航行體控制的研究。
為了研究空泡閉合位置的變化從而增加水下航行體運動控制效果,本文設計了帶有可變剛度彈性尾緣的超空泡航行體模型,獲得了航行體模型不同變形狀態與不同通氣量對空泡形態及航行體表面壓力變化的影響特性,為水下超空泡航行體的運動控制研究提供了技術參照和數據支撐。
1 通氣試驗裝置與模型
1.1 通氣試驗裝置
試驗在哈爾濱工業大學HT-01型循環式通氣水洞中完成,該試驗系統主要由水洞及其操控系統組成,圖1所示為水洞整體示意圖,其中工作段為0.26 m×0.26 m×1.00 m的長方體。為便于觀察,工作段四周均用透明有機玻璃裝配,下游尾水罐用來分離通入的氣體,以保證通氣試驗連續進行。
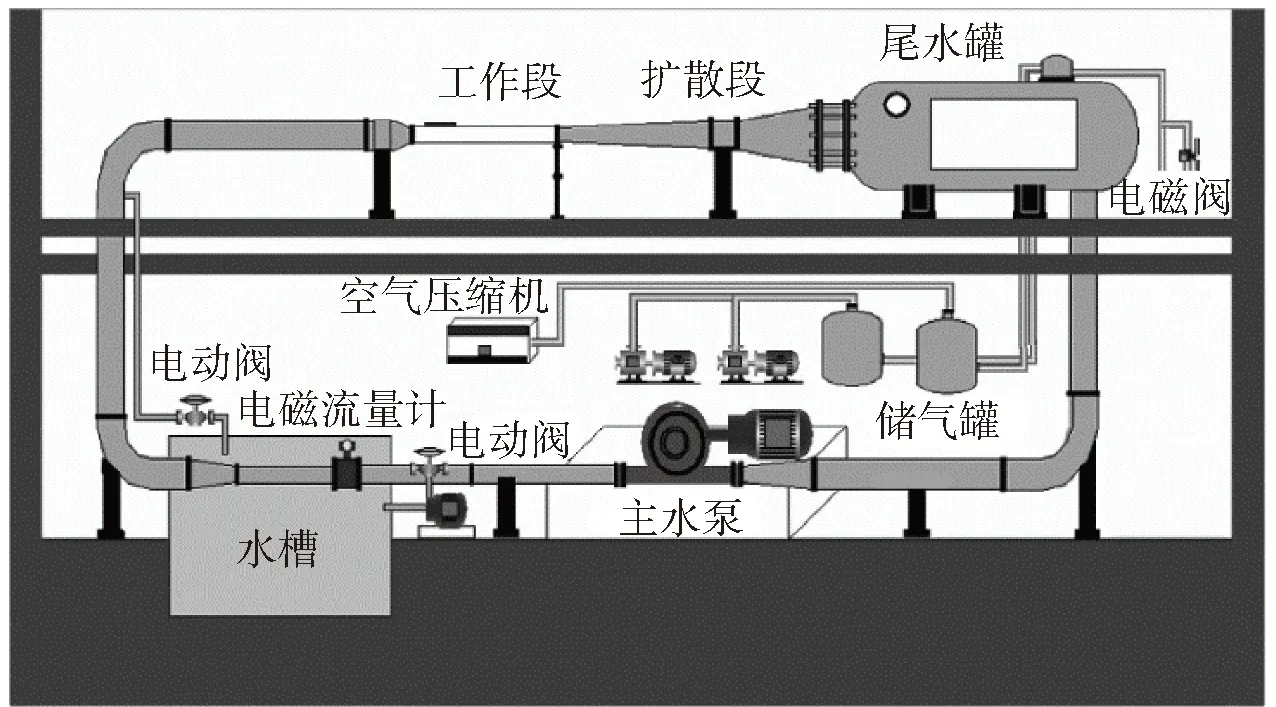
圖1 超空泡循環水洞示意圖Fig.1 Schematic diagram of water tunnel
試驗的整體方案示意圖如圖2所示,其中數據采集系統線纜由支撐桿內部引出,以防干擾流場結構。試驗中采用德國璦荔德公司生產的METRON Prosilica GE680C型工業相機進行圖像數據采集,設置拍攝幀率為200 幀/s,曝光時間為3/10 000 s.由于拍攝曝光時間較短,為保證照片的清晰度,試驗中使用兩盞功率1 000 W新聞燈構成的背光源和一盞功率1 000 W新聞燈構成的前光源,在背光源前架設柔光屏,令入射光線漫射,以達到流域亮度均勻一致的效果。
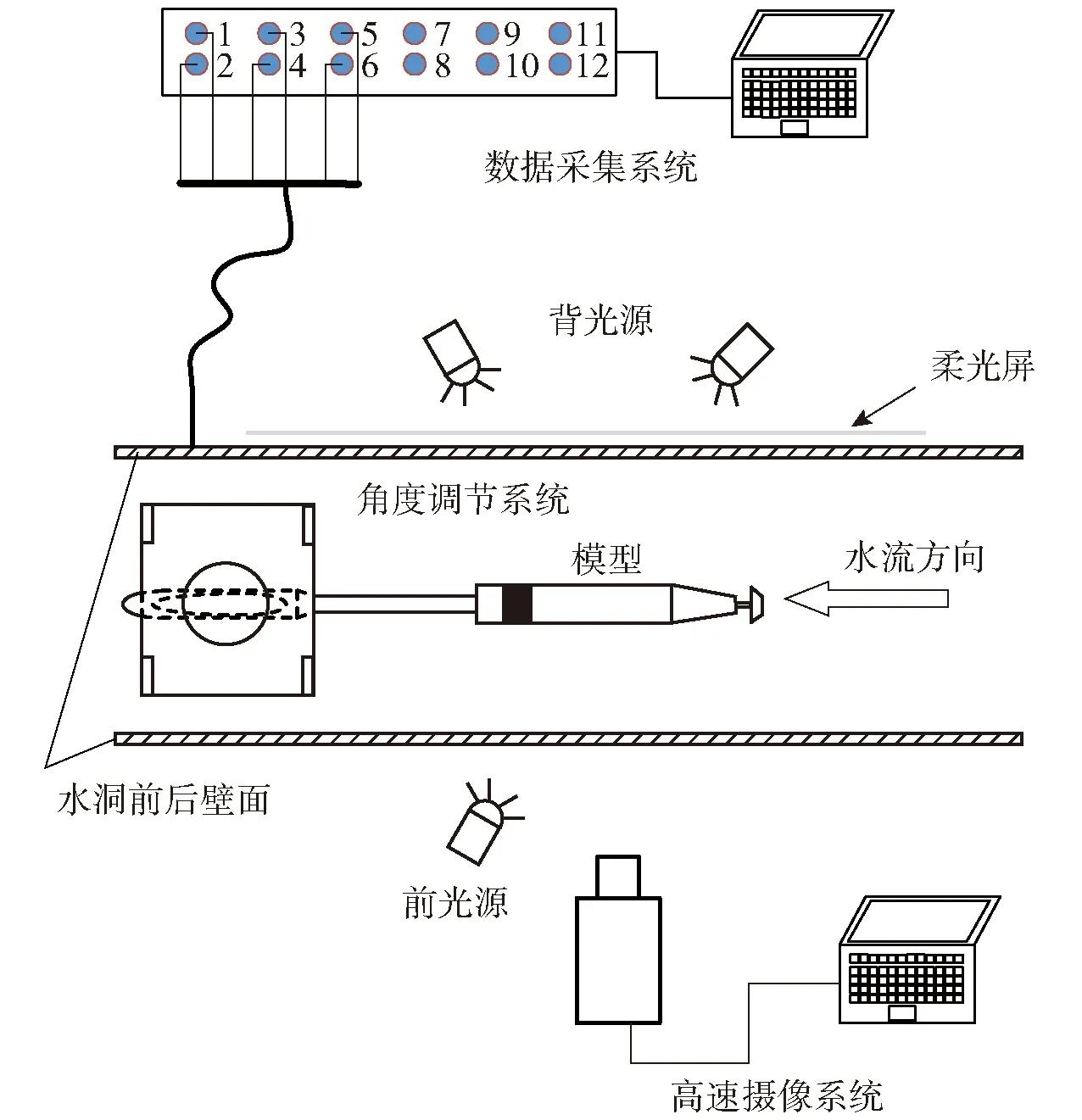
圖2 試驗方案示意圖Fig.2 Schematic diagram of experimental setup
壓力脈動信息由江蘇東華測試技術股份有限公司生產的動態測試系統采集,采樣頻率為2 kHz.水洞工作段流速可由安裝在水洞管路上的電磁流量計換算獲得,在0~18 m/s范圍內連續可調。試驗時,當流場流速與空泡形態均達到穩定狀態后,同時進行圖像數據與壓力脈動信號的采集。
1.2 試驗模型
圖3(a)所示為超空泡航行體模型實物圖:試驗模型主體采用鋁合金材質;彈性尾緣材料為丁基橡膠,在內側氣腔與外側流場壓力差作用下產生形態與剛度的變化;彈性尾緣前后載體均采用不銹鋼材質增加強度。圖3(b)所示為航行體模型原理圖:模型整體長度575 mm,最大直徑40 mm;1號空氣壓縮機與穩壓罐連接,為彈性尾緣內側氣腔提供穩定壓力,可使尾緣產生變形并發生剛度的改變;2號空氣壓縮機由通氣管連接至空化器處,為模型提供穩定流量通氣以產生超空泡;兩條通氣管路分別采用獨立的氣源與管路,互相不存在影響;壓力傳感器P4安裝在水洞工作段前端壁面上。圖3(c)所示為彈性尾緣部位的設計圖:由前中后3部分組合而成,中部不銹鋼載體與丁基橡膠之間形成氣腔;橡膠前后兩端在凹槽處由連接處壓緊,并放置密封圈以保證氣室的氣密性;壓力傳感器P1、P2、P3分別安裝在彈性尾緣的前中后3處位置,與模型后基準面的距離分別是16 mm、50 mm、81 mm.
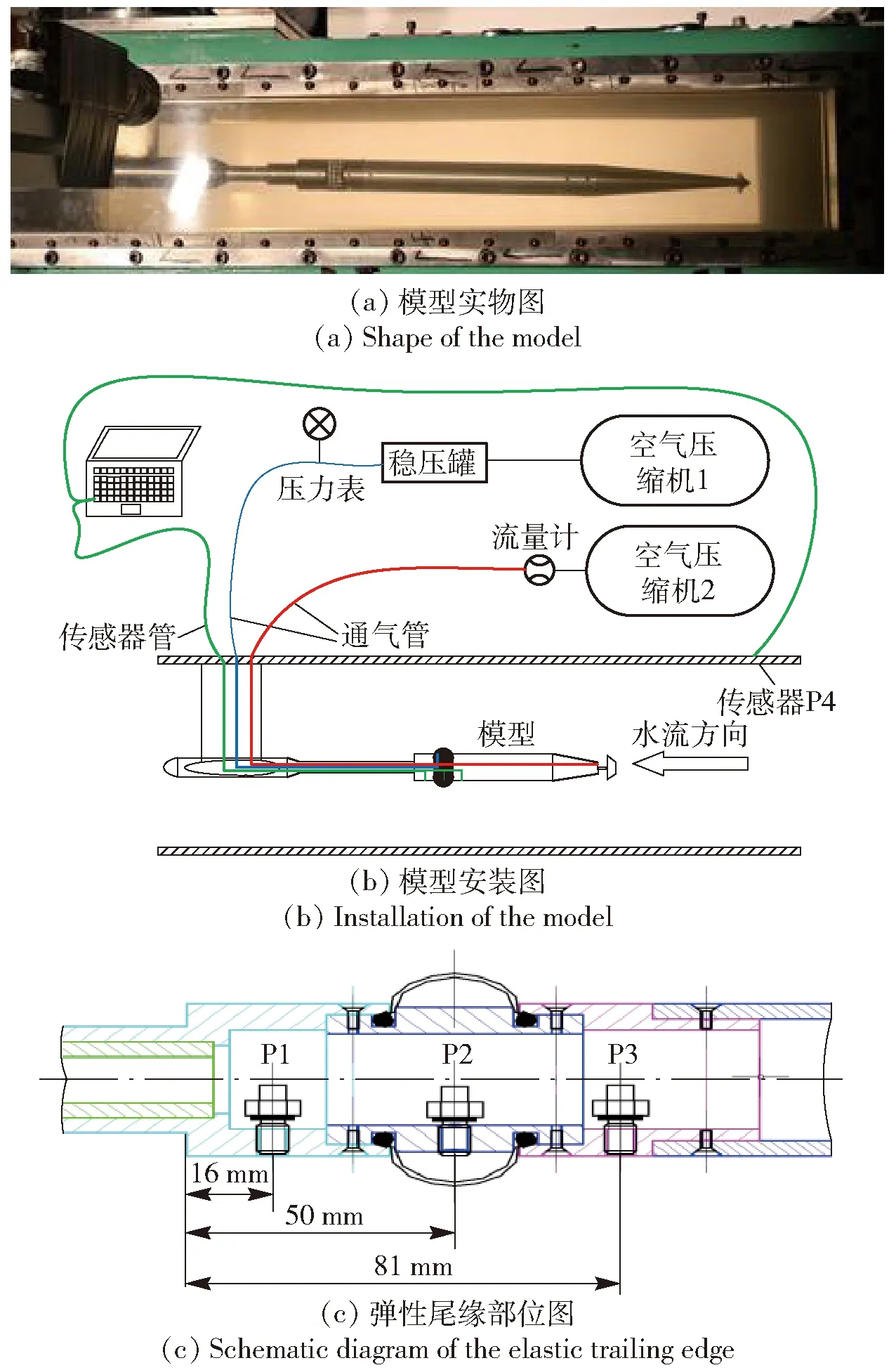
圖3 試驗模型示意圖Fig.3 Schematic diagram of experimental model
對試驗模型在彈性尾緣不同狀態下的航行阻力進行預估,結果如表1所示。由表1可以看到,彈性尾緣發生形變后,超空泡航行體減阻效率有所下降,因此尾緣形變狀態適用于對航行體有較高機動要求的情況,而在直航狀態下尾緣應保持無形變狀態。
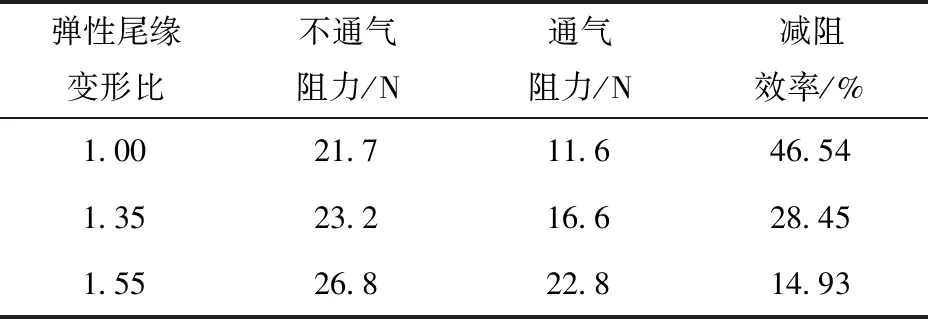
表1 通氣超空泡航行體阻力變化表Tab.1 Resistance change of ventilated supercavitating vehicle
2 試驗結果分析
由于試驗模型長細比較大,在重力作用下,空泡尾部上漂明顯。當彈性尾緣無變形且通氣量足夠時,航行體上表面形成貫通超空泡,下表面處的空泡只能閉合在彈性尾緣前方,為使空泡覆蓋模型下表面傳感器位置以進行對比研究,本文中將試驗模型順時針旋轉2°.本文試驗過程均處在流速8 m/s,水洞工作段壓力90 kPa的環境下。
2.1 可變剛度彈性尾緣變形特性
無空泡時對彈性尾緣形態的觀察效果更加明顯,圖4給出了在一定來流速度下不同壓力差的彈性尾緣變形情況。圖4中:壓差系數Cp分別為0、0.18、0.24;隨著壓差系數的逐漸提高,彈性尾緣變形比ε分別為1.00、1.35、1.55.
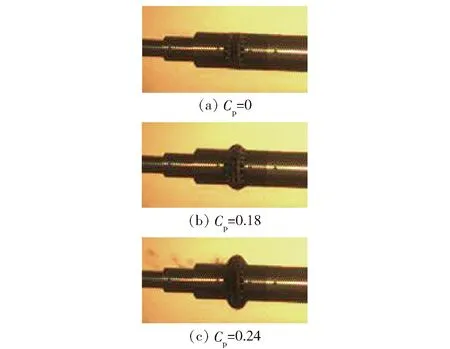
圖4 彈性尾緣變形圖Fig.4 Deformation of elastic trailing edge
對尾緣壓力差與變形量做無量綱處理,壓差系數Cp與變形比ε分別定義如(1)式和(2)式:
Cp=Δp/p∞,
(1)
式中:p∞為水洞工作段環境壓力,通過安裝在水洞工作段區域側壁的壓力傳感器P4測得;Δp=p-p∞為尾緣內壓力與環境壓力的差,其中尾緣內壓力p由傳感器P2測得。
ε=d/D,
(2)
式中:D為模型主體直徑;d為尾緣直徑。由于尾緣直徑在水流環境下存在變形,其直徑d通過高速攝像拍攝的圖像獲得,即為像素直徑。為了保證模型直徑也為像素直徑,模型直徑D也通過圖像測量得到。
由圖4可見,在圖4(a)中壓差系數為0,彈性尾緣由于自身彈性而緊縛于模型上。隨著壓差系數的增大,彈性尾緣發生彈性變形以產生恢復力,在與壓差力達到平衡后變形結束。對比相同來流速度下3組不同壓差系數的彈性尾緣變形情況,可知彈性尾緣變形隨著壓差系數的增加而不斷增大。同時,由于尾緣內氣壓的增大,尾緣的剛度隨著其變形的增大而增大。
2.2 彈性尾緣區域空泡形態特性
在不同壓差與不同通氣率下,對帶有可變剛度彈性尾緣的超空泡航行體模型進行水洞試驗,通過對比分析可以得出彈性尾緣區域空泡形態特性。
定義空化數如下:
(3)
式中:pc為空泡內壓力,通過傳感器P3測得;v∞為來流速度;ρ為液體密度。
對通氣量做無量綱處理,通氣率定義如下:
(4)
式中:Q為與空化器連接氣路的通氣量,可以由流量計直接讀出;S為空化器最大橫截面面積。
如圖5(a)、圖5(b)所示,此時彈性尾緣無變形,通氣率達到0.08后空泡迅速發展,覆蓋至航行體下表面尾部,而上表面空泡閉合在尾緣前方。通氣率變為0.42后,發現隨著通氣量的繼續增大,航行體上表面空泡的閉合點不斷向后延伸,最終將彈性尾緣包裹進空泡內。此階段彈性尾緣與空泡之間不發生耦合作用。
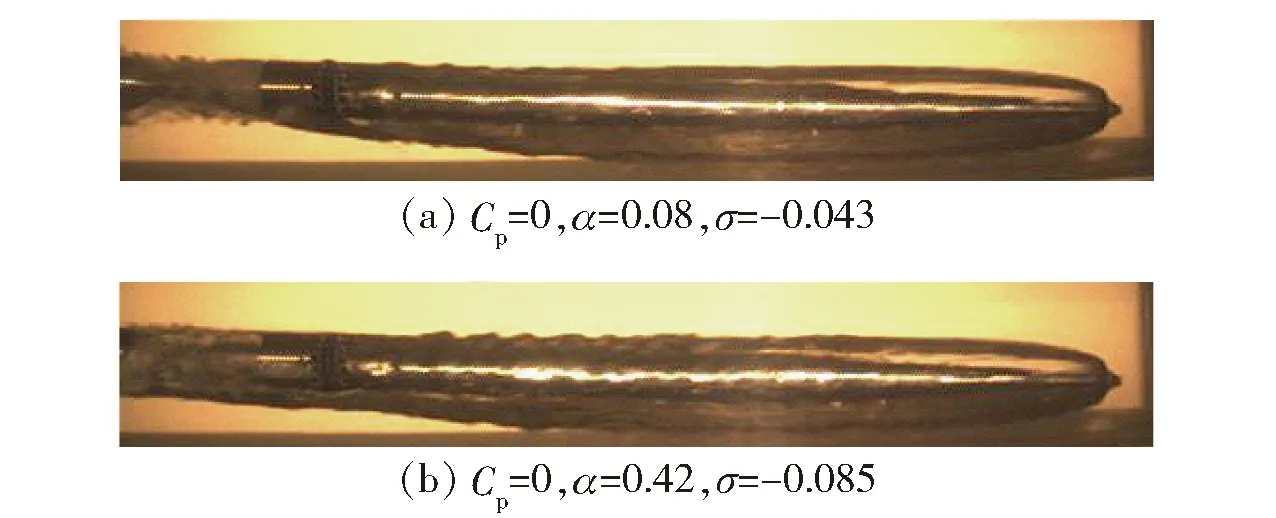
圖5 通氣超空泡航行體形態圖Fig.5 Patterns of ventilated supercavitating vehicle
如圖6(a)所示,通氣率處于0.08~0.12范圍時,彈性尾緣變形比與剛度隨壓差的增加而增大,無變形狀態下空泡閉合在航行體上表面彈性尾緣前方,而航行體下表面被貫通形成超空泡。從圖6(b)、圖6(c)中可以看出,隨著彈性尾緣的變形,空泡在航行體下表面的閉合點位置前移至尾緣前方,同時在尾緣后方產生愈加劇烈的尾空泡。這是因為彈性尾緣變形后,水流沖擊尾緣前端,造成局部高壓,空化數升高導致空泡迅速閉合在尾緣前方,而彈性尾緣后方由于脫體繞流作用壓力減小,空化數降低導致生成尾空泡。
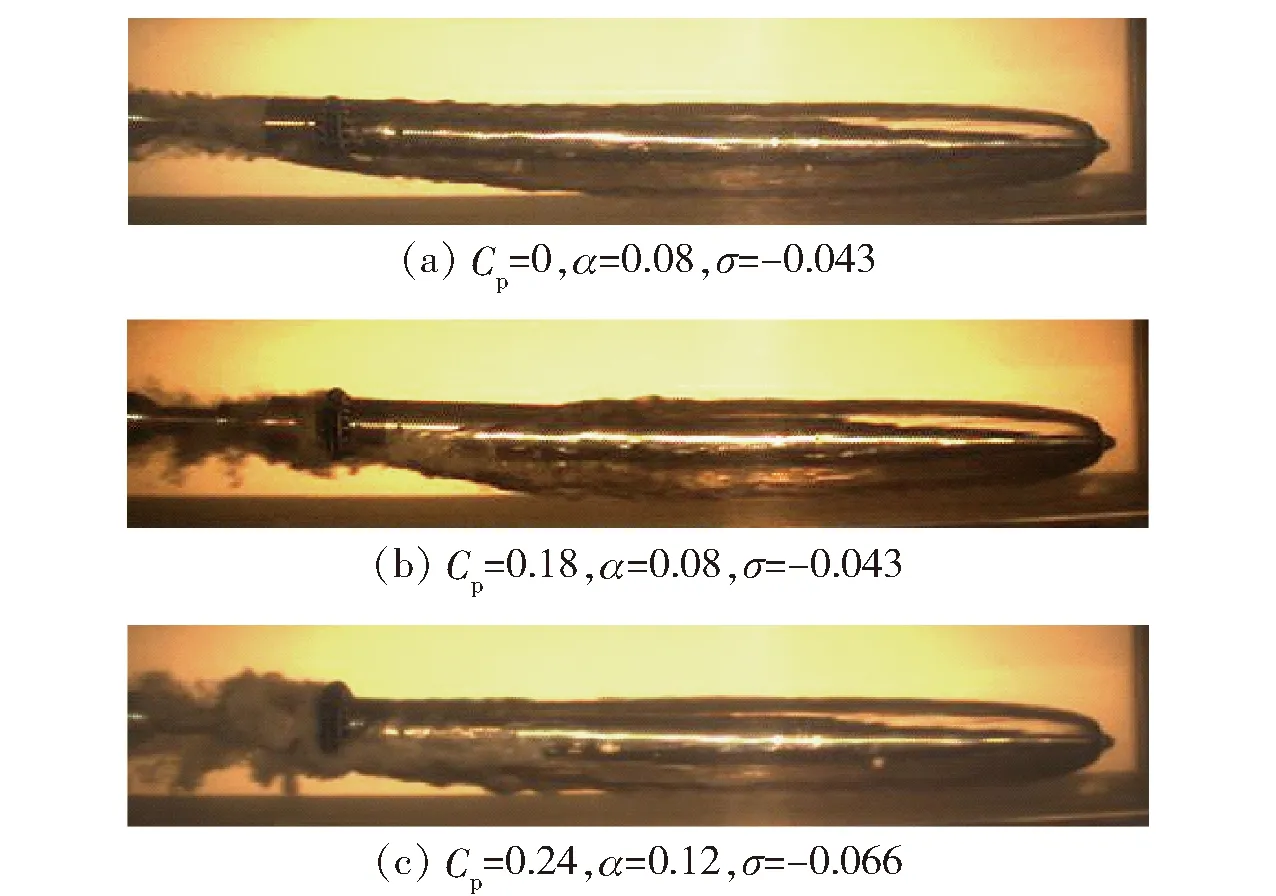
圖6 不同剛度尾緣空泡形態圖(α為0.08~0.12)Fig.6 Patterns of cavitation of different trailing edges(α=0.08-0.12)
通過觀察圖7中通氣率處于0.37~0.44范圍時彈性尾緣的流場控制特性,發現空泡形態的變化規律與通氣率處于0.08~0.12范圍時相同,僅由于通氣量的增大導致彈性尾緣后方的尾空泡更加明顯,表明此可變剛度彈性尾緣在通氣率為0.08~0.44范圍內時,對空泡閉合點位置具有有效的影響。
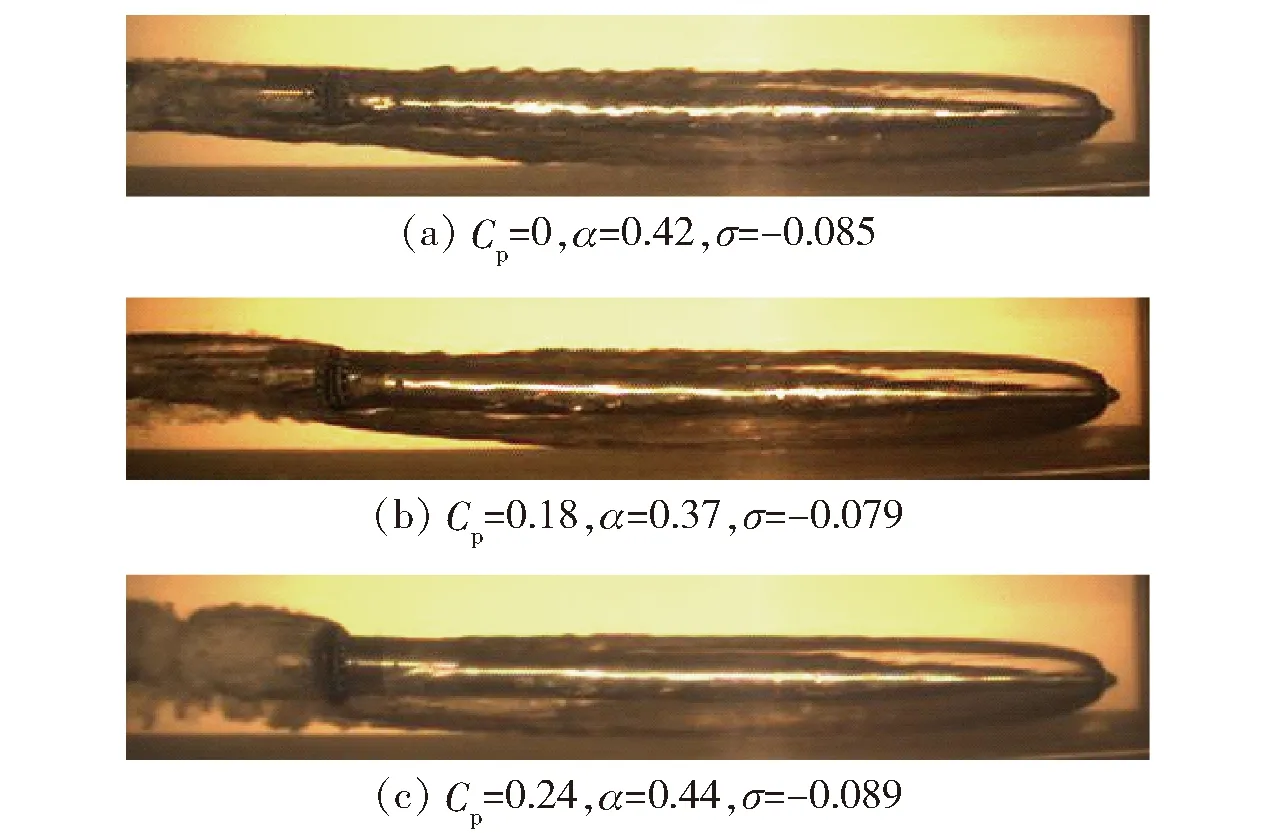
圖7 不同剛度尾緣空泡形態圖(α為0.37~0.44)Fig.7 Patterns of cavitation of different trailing edges(α=0.37-0.44)
2.3 彈性尾緣區域壓力脈動特性
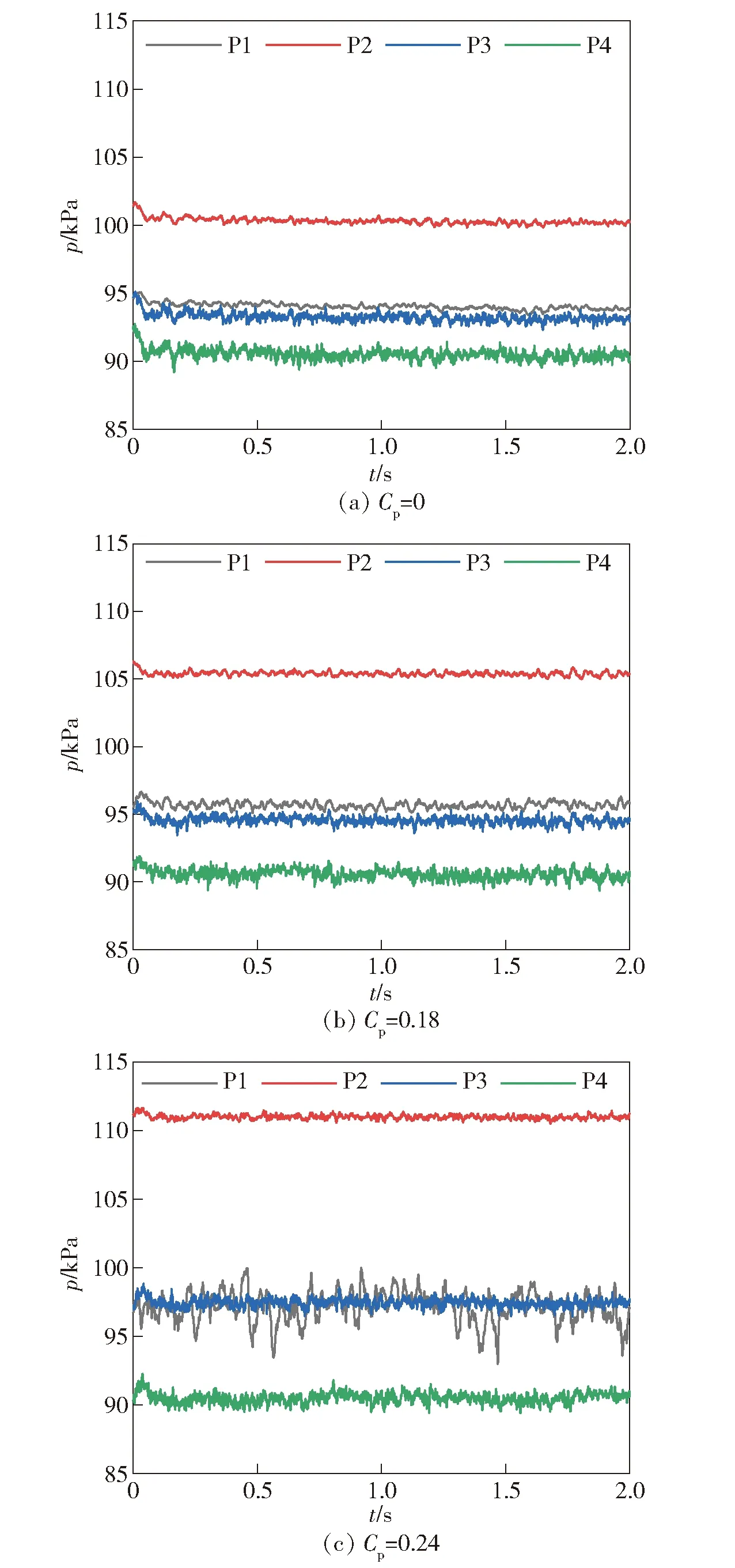
圖8 不同剛度尾緣壓力信號(α=0)Fig.8 Pressure signals at different trailing edges(α=0)
為研究彈性尾緣不同剛度對其附近壓力的影響,將壓力數據進行處理分析。通氣率為0時各采集點壓力數據如圖8所示,參考圖4(a)、圖4(b)、圖4(c)可知此時航行體表面無空泡,流場處于穩定狀態。圖8(a)中尾緣無變形并緊縛于航行體上,因此傳感器P2處數據為尾緣向內擠壓的壓力示數,無參考意義。對比圖8(a)、圖8(b)、圖8(c)可以發現,隨著彈性尾緣剛度的增加,水洞工作段流場壓力不變,而航行體表面壓力變大且傳感器P1壓力波動幅值明顯增大。這是因為彈性尾緣剛度變化后,在來流作用下傳感器P3處位于迎流高壓區,導致其壓力變大;而傳感器P1處受到繞流尾渦在生成與脫落過程中的沖擊作用,因此該位置壓力變大且波動幅值增大。

圖9 不同剛度尾緣壓力信號(α為0.37~0.44)Fig.9 Pressure signals at different trailing edges(α=0.37-0.44)
對通氣率0.37~0.44范圍內的壓力信號進行分析,如圖9(a)所示,壓差為0時彈性尾緣處于無變形狀態,此時尾緣前后壓力基本相等,結合圖7(a)可知航行體下表面被包裹在空泡內,失去了水動力作用因此壓力較小。觀察圖9(b)中壓力變化可知,此時彈性尾緣變形比為1.35,傳感器P3處壓力保持不變而傳感器P1處壓力變大且壓力波動幅值增大,結合圖7(b)可知此時航行器下表面的空泡閉合點前移,但仍然跨過傳感器P3處閉合在尾緣前,傳感器P3處仍位于空泡內,壓力基本不變,而傳感器P1處變為沾濕狀態導致壓力增大,且由于尾渦的干擾產生波動。再觀察圖9(c)中的壓力信號發現,此時尾緣變形比為1.55,傳感器P3處壓力仍保持不變而傳感器P1處壓力略微降低;結合圖7(c),發現尾緣后方產生尾空泡,導致傳感器P1處沾濕面積減小從而壓力下降,而位于航行體下表面的空泡閉合點在尾緣與傳感器P3之間波動,導致傳感器P3處壓力產生振幅突變。
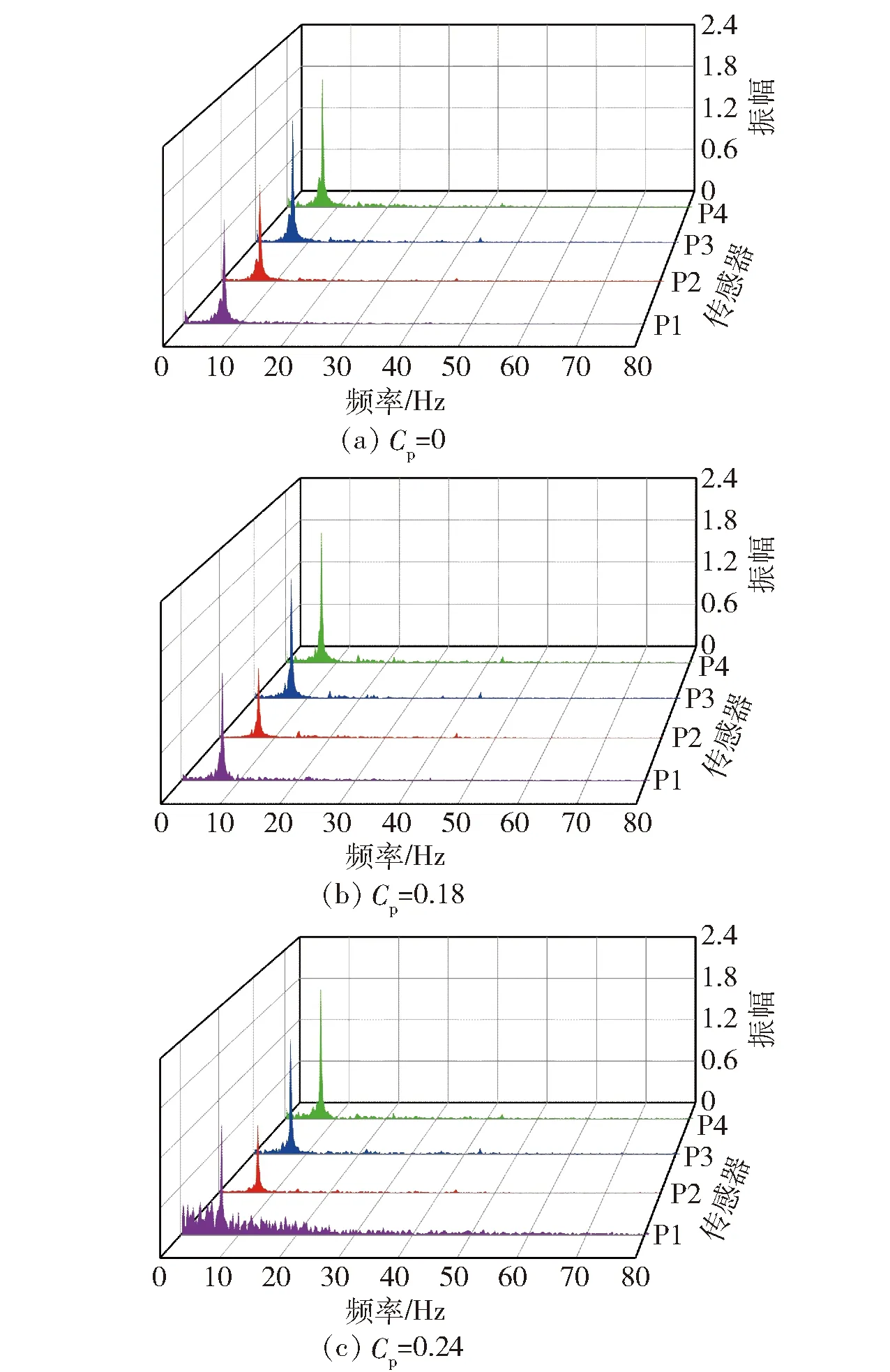
圖10 不同剛度尾緣壓力信號頻譜分析(α=0)Fig.10 Frequency spectra of pressure signals at different trailing edges(α=0)
為了更好地分析彈性尾緣區域壓力的周期振蕩特性,選取通氣率為0和0.37~0.44范圍內測得的壓力時間信號進行快速傅里葉變換(FFT)分析。從圖10中可以得到,通氣率為0時不同傳感器壓力信號在尾緣不同剛度條件下均存在7.08 Hz的主脈動頻率,通過傳感器P4處壓力信號可以判斷出此頻率為水流沖擊產生的固有頻率。通氣率為0時傳感器P2、傳感器P3與傳感器P4處壓力信號不隨彈性舵變形而變化,頻率集中在0~10 Hz;傳感器P1處壓力信號在變形比為1.55時具有更寬的頻率分布,分布范圍為0~30 Hz,這是因為尾緣后方產生了不穩定繞流尾渦,尾渦的波動造成傳感器P1處壓力的振蕩。
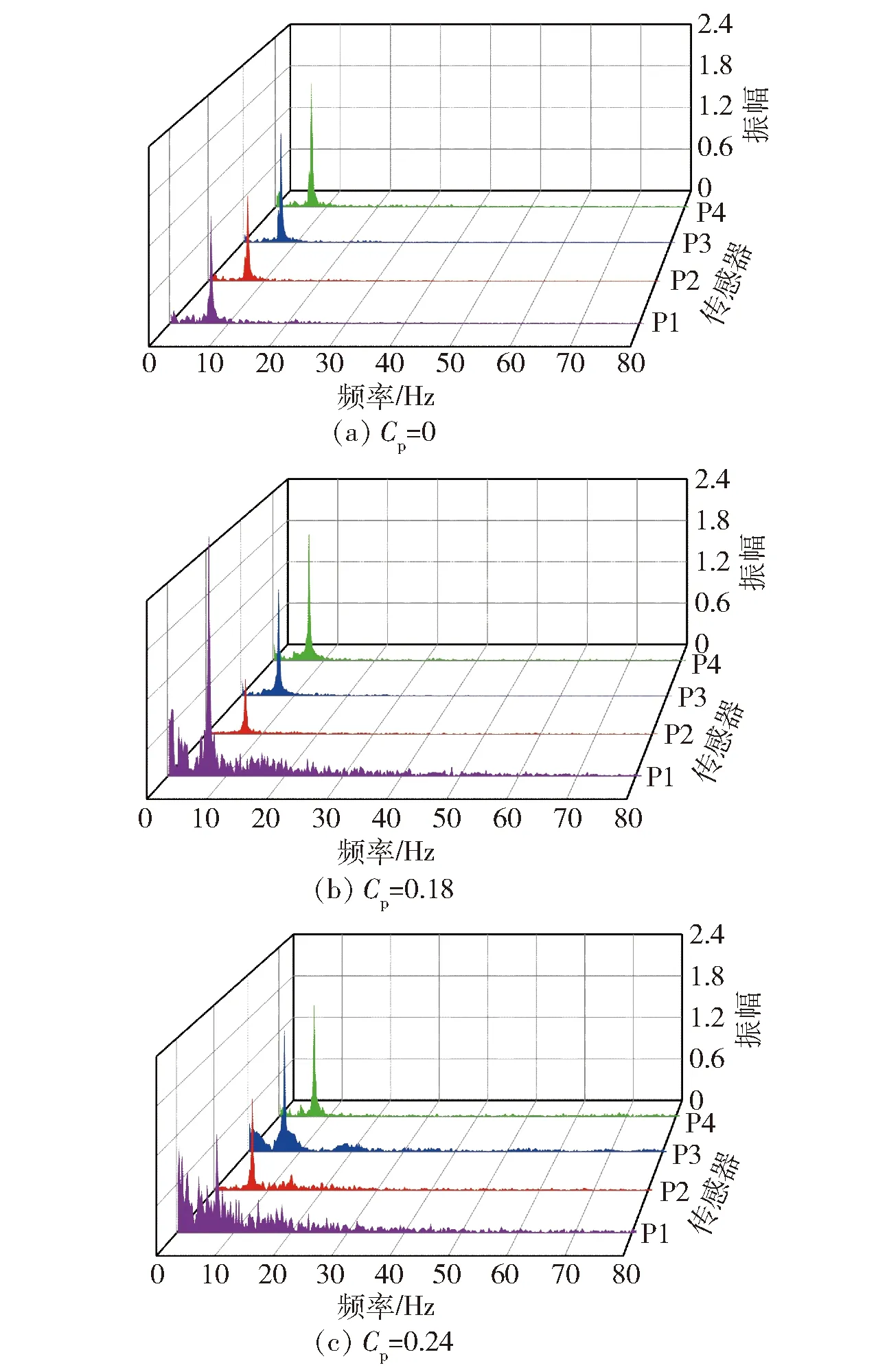
圖11 不同剛度尾緣壓力信號頻譜分析(α為0.37~0.44)Fig.11 Frequency spectra of pressure signals at different trailing edges(α=0.37-0.44)
通氣率在0.37~0.44范圍內的壓力頻譜分析如圖11所示。由圖11可見,在不考慮水流沖擊頻率的前提下,變形比為0時航行體被包裹在空泡內,壓力振蕩基本消失。變形比為1.35時傳感器P1處位于主空泡外部,其壓力頻率集中在0~40 Hz范圍內,頻率峰值為0.73 Hz,這是因為尾緣后方尾空泡的波動造成的。變形比為1.55時傳感器P1處受更加劇烈的尾空泡波動影響,壓力振蕩更大,頻率峰值為0.49 Hz;傳感器P2與傳感器P3受到主空泡閉合點波動影響,傳感器P2處產生峰值為14.41 Hz的主頻率,而傳感器P3處產生了峰值為0.24 Hz的主頻率,傳感器P2處壓力頻率遠大于傳感器P3處,表明空泡閉合點更傾向于向尾緣位置波動,也驗證了尾緣影響空泡閉合點位置的有效性。
3 結論
本文針對水下超空泡航行體尾部空泡形態特性及壓力脈動特性,利用通氣超空泡水洞進行了帶有可變剛度彈性尾緣的水下超空泡航行體模型試驗研究。得到以下主要結論:
1)研制了帶有可變剛度彈性尾緣的水下超空泡航行體模型,測試得到了不同壓差系數及通氣率下的通氣空泡高速圖像及特征點壓力數據。
2)獲得了可變剛度彈性尾緣形態隨壓差變化特性,尾緣變形隨其兩側壓力差的增加而增大,同時尾緣剛度也隨之提高。
3)獲得了彈性尾緣在不同變形狀態下與空泡形態變化的關系,尾緣無變形時對空泡形態無影響,發生變形后空泡閉合點前移至彈性尾緣前方,無法跨過尾緣形成貫通超空泡,表明尾緣有效影響了空泡閉合點位置。
4)獲得了彈性尾緣在不同變形狀態下與特征點壓力變化的關系,尾緣發生變形后其后方進入沾濕狀態,導致表面壓力增大,提高了航行體模型水動力作用效果。
猜你喜歡
童話王國·奇妙邏輯推理(2024年5期)2024-06-19 16:03:38
中學生數理化·七年級數學人教版(2020年10期)2020-11-26 08:24:50
中華詩詞(2020年1期)2020-09-21 09:24:52
數學物理學報(2020年2期)2020-06-02 11:29:24
小學生作文(中高年級適用)(2018年5期)2018-06-11 01:22:56
數學小靈通·3-4年級(2017年10期)2017-11-08 08:42:59
中學生數理化·七年級數學人教版(2017年11期)2017-04-23 07:18:00
數學大王·中高年級(2016年12期)2016-12-26 21:37:36
光學精密工程(2016年6期)2016-11-07 09:07:19
核科學與工程(2015年4期)2015-09-26 11:59:03
