水聲傳感器網絡信號到達時間差目標定位的最小二乘法估計性能
2020-04-16 01:39:06王領申曉紅康玉柱花飛王海燕
兵工學報 2020年3期
關鍵詞:方法
王領,申曉紅,康玉柱,花飛,王海燕,2
(1.西北工業大學 航海學院,陜西 西安 710072;2.陜西科技大學 電子信息與人工智能學院,陜西 西安 710021)
0 引言
在海洋環境監測中,分布式水聲傳感器網絡是一種方便靈活的監測手段,目標定位是海洋環境監測的一個基本功能。國內外學者對基于多傳感器節點的協同目標定位方法已開展了廣泛研究[1-8]。常用協同目標定位方法的基本思想是:假設傳感器網絡各節點位置準確已知,每個節點獲取觀測值后,依據一定的定位算法提取其相關信息并傳輸至中心節點,中心節點依據獲得的信息對聲源位置進行估計[1-8]。其中,常用的基于測距的目標定位算法有基于信號到達時間算法、基于信號到達時間差(TDOA)算法、基于信號到達角度算法、基于到達頻差算法、基于信號到達強度算法,以及以上算法的組合。由于基于TDOA的目標定位算法具有硬件要求低(每個節點僅需要有一個接收通道)、計算復雜度低、定位精度高等優點,是基于傳感器網絡節點對目標被動定位的首選算法[9-12]。在TDOA目標定位算法中,以Chan算法[13]、泰勒級數展開算法[14]和近似最大似然估計算法[15]的精度最高。特別是Chan算法采用基于兩步加權最小二乘(WLS)算法給出了定位算法的解析解,并從理論和仿真兩個角度證明當噪聲較小且服從高斯分布時,其均方誤差能達到克拉美羅下界(CRLB)[13]。由于性能優越,Chan算法得到了廣泛應用。
目前研究的協同目標定位算法大多是針對陸地電磁波傳感器節點的[1-13]。由于陸地傳感器節點可借助于衛星使節點本身的位置誤差較小,這些算法均假設傳感器節點的位置準確已知,僅考慮對目標到達時間差的測量誤差。水聲傳感器網絡是以水聲為通信介質,以海洋環境監測為目的,工作于水下,無法用衛星進行自定位,通常采用基于距離的傳感器節點自定位。由于水聲的非直線及長時延多徑傳播,使得水聲節點的自定位誤差遠比基于衛星的自定位誤差大(1個數量級以上)。此外,由于水中的浮標或潛標會隨洋流飄動,在水聲傳感器網絡對目標定位的算法中不能忽略節點的自定位誤差,在這種情況下研究如何提高水聲網絡傳感器節點對目標的協同定位精度,是十分迫切的。
本文針對水聲傳感器網絡目標定位中節點位置誤差和測距誤差同時存在條件下的目標定位性能問題,建立雙誤差條件下的TDOA目標定位模型;提出一種基于加權整體最小二乘(WTLS)算法的TDOA目標定位算法,將測距誤差和傳感器節點位置誤差的先驗信息融入算法中。仿真結果表明,WTLS算法與常用的兩步WLS算法相比,有很好的定位性能。
1 雙誤差條件下的TDOA目標定位模型
1.1 目標與傳感器節點之間的幾何關系
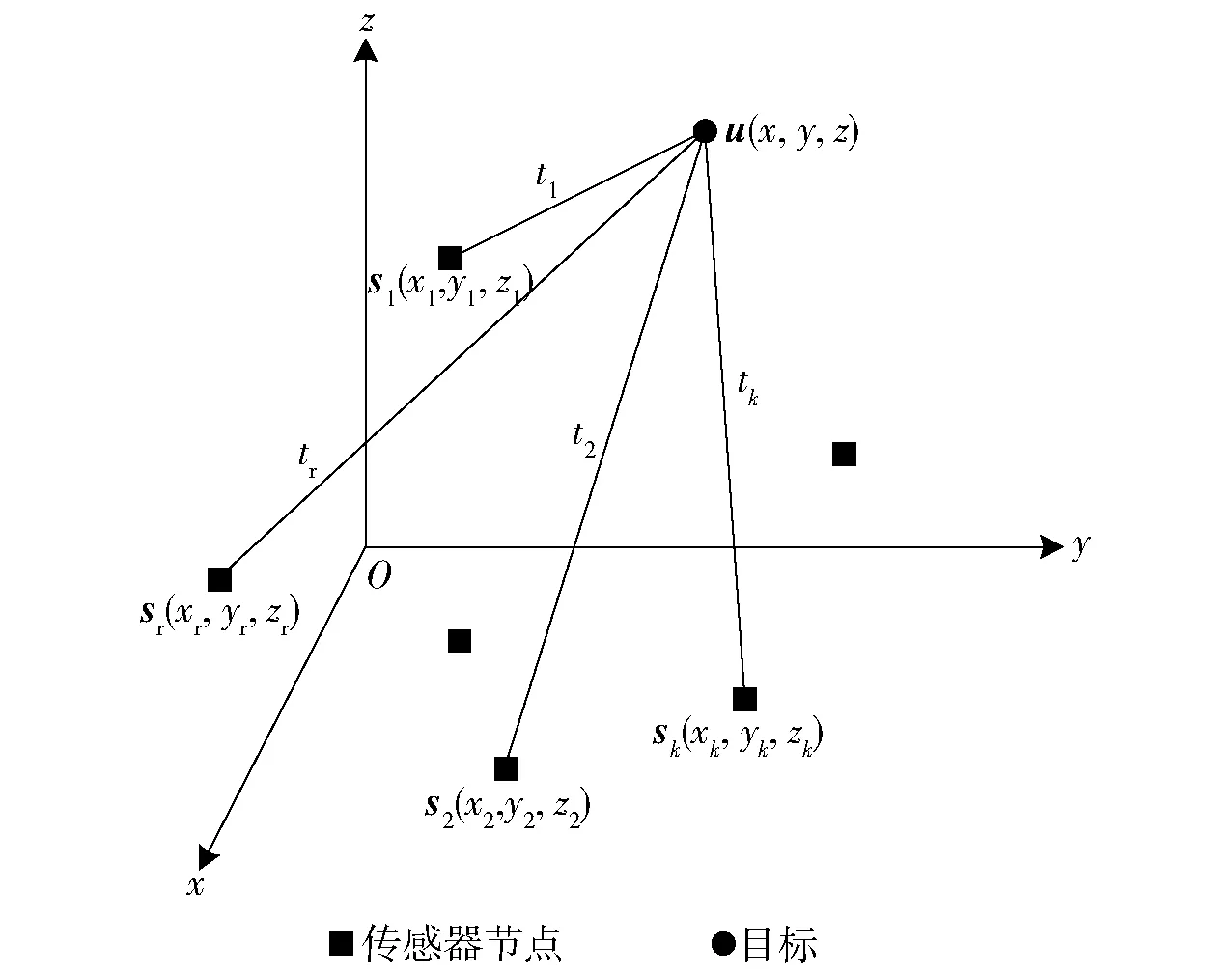
圖1 基于TDOA的目標估計示意圖Fig.1 Target estimation based on TDOA
基于傳感器節點的目標定位示意圖如圖1所示。假設M個傳感器節點的位置坐標分別為sk=[xk,yk,zk]T,k=1,2,…,M,xk、yk、zk表示第k個節點位置坐標的3個分量;單獨將另一個傳感器節點作為參考節點,用于計算目標到其他節點和到參考節點的距離差,參考節點位置坐標為sr=[xr,yr,zr]T,xr、yr、zr表示參考節點位置坐標的3個分量;目標位置坐標為u=[x,y,z]T。則第k個節點接收到目標u信號的到達時刻tk為
(1)
式中:c為水中聲速,c≈1 500 m/s;t0為目標發射信號的時刻;nk為目標信號到達第k個傳感器節點的時間估計誤差,且獨立同高斯分布。圖1中,t1、t2、tk、tr分別表示第1個、第2個、第k個節點和參考節點接收到目標u信號的到達時刻。
當目標為非協作目標或異步網絡時,目標的發射信號時刻t0無法獲得,TDOA采用目標到節點與參考節點時間差的方法,無需知道目標發射信號的時刻t0.目標信號到第k個節點與參考節點的時間差為

(2)
式中:nk、nr分別表示目標信號到達第k個傳感器節點和參考節點的時間估計誤差。對于三維目標定位,(2)式中的未知數u=[x,y,z]T的維數等于3,當M≥3時可得雙曲方程(2)式的解;對于二維目標定位,(2)式中的未知數u=[x,y]T的維數等于2,當M≥2時可得雙曲方程(2)式的解。此即基于TDOA的傳感器節點目標定位思想。
(2)式的本質是求解由多個TDOA構成的雙曲線的交點,當M取等號時得到三元二次方程(三維)或二元二次方程(二維),可直接求解;當傳感器節點較多時,(2)式為超定非線性方程,不能直接應用線性方法求解,若采用迭代搜索法則存在收斂性問題。文獻[16]提出一種參數變換的方法,通過二維坐標中目標、傳感器節點之間的距離及其幾何關系,利用一個中間未知量,將非線性方程轉化為偽線性方程。文獻[13]給出了含有目標位置坐標以及目標到參考節點距離的超定偽線性方程組,并采用兩步WLS法給出該方程組的解析解。文獻[13]采用二維坐標給出的結果也適用于三維坐標。本文借鑒文獻[13]的思路,以二維坐標為例,所得結果同樣也適用于三維坐標。
在二維平面中,目標到參考節點sr=[xr,yr]T的距離為

(3)


(4)
(4)式減去(3)式,得
(5)
式中:xkr=xk-xr;ykr=yk-yr.

(6)
1.2 雙誤差條件下的TDOA目標定位模型

(Ga+ΔG)z=ha+Δh,
(7)

2 基于最小二乘的求解方法
高斯- 馬爾可夫定理研究表明:在線性回歸模型中,如果誤差滿足零均值、同方差且互不相關,則最小二乘法估計是回歸系數的最佳線性無偏估計。本文研究誤差不滿足高斯- 馬爾可夫定理要求時,用最小二乘方法對雙誤差條件下TDOA目標定位模型((7)式)求解的性能。限于篇幅,本文僅分析目標距離估計網絡較遠的情況。
為了方便對比,在2.1節給出Chan算法的兩步加權最小二乘方法的求解步驟;在2.2節給出本文所提基于WTLS,包括推導協方差矩陣的表達式并給出定權方法,建立約束優化模型,基于Lagrange乘數法推導迭代表示式,最后給出求解步驟。
2.1 兩步WLS方法
WLS方法忽略了模型(7)式中的節點自定位誤差包括乘性誤差,僅考慮距離差估計的測量誤差,則模型(7)式可表示為
Gaz=h,
(8)
式中:h=ha+Δh=
(8)式的求解問題可表示為如下優化問題:
(9)
由于模型(8)式中的誤差僅是由距離估計誤差引起,則誤差可表示為
(10)
式中:B=diag(d1r+dr,d2r+dr,…,dMr+dr),且BT=B;n=[n1r,n2r,…,nMr]T服從均值為0、協方差矩陣為Q的高斯分布;符號⊙表示Hadamard乘積。
由于dkr+dr?cnkr,忽略其高階項,e≈cBn也服從均值為0的高斯分布,其協方差矩陣可表示為
Σ=Cov(e,e)=E[eeT]≈
c2BE[nnT]BT=c2BQB,
(11)
式中:Cov(e,e)表示求e的協方差矩陣;E[·]表示·的數學期望。
(12)
式中:z取決于Σ(或Q)的矩陣結構,而與其縮放比例無關。考慮到z中dr與[x,y]T的相關性,Chan給出了兩步WLS的算法[13]。該算法的具體步驟如下:
步驟1利用WLS對模型(8)式計算,得到初始解
式中:za為z的估計值。由于目標距離較遠,可用Q代替Σ,得
步驟2利用步驟1的估計值重新構造一組誤差方程組進行第2次估計。重構的方程組為
由此得到優化函數為


再次使用加權最小二乘法,得
z′≈(G′TB′-1GQ-1GB′-1G′)-1G′TB′-1GQ-1GB′-1h,
其中B′=diag[(za1-xr),(za2-yr),za3]。
步驟3Chan算法得到的最終目標位置估計值為
2.2 WTLS方法
(7)式表示的雙誤差條件下TDOA目標定位模型是變量(因變量和自變量)包含誤差(EIV)模型[17],進一步可表示為
(13)

為了方便推導,忽略Δh中的高階項,得

由假設條件及(13)式可知,加性噪聲矩陣和乘性噪聲矩陣服從如下分布:
(14)
式中:vec(·)表示矩陣按列向量拉直;Σh和ΣG分別為Δh和ΔG的協方差矩陣,
(15)
(16)
G1、G2、G3為ΔG的3個列向量,其對應的協方差矩陣分別為ΣG1、ΣG2、ΣG3,G1、G2、G3之間是相互獨立的,因此ΣG中除ΣG1、ΣG2、ΣG3外的元素都為M階零矩陣0.
由此可推導出

分別為協方差矩陣ΣG的3個分塊矩陣。
EIV模型的TDOA目標定位問題可轉化為如下條件優化問題:

(17)
本文使用Schaffrin[18]等提出的方法進行定權,即要求協方差矩陣ΣG被分解為(18)式的形式:
ΣG=Qx?Q0,
(18)
式中:
(17)式所示的優化問題可轉化為下列約束優化問題:

(19)
本文按Lagrange乘數法求解,于是構造目標函數如下:

(20)
式中:拉格朗日因子λ∈RM×1.
對(20)式中的Δh、vec(ΔG)、λ和z分別求偏導數,并使其等于0,可以得到
(21)

(22)
(23)
(24)
(21)式、(22)式代入(23)式,得
=[Σh+(TQ0)Qx]-1(ha-Ga).
(25)
(25)式代入(21)式及(22)式,得
Δ=-Σh[Σh+(TQ0)Qx]-1(ha-Ga),
Δ=Qx[Σh+(TQ0)Qx]-1(ha-Ga)TQ0.
(26)
(25)式、(26)式代入(24)式,得
=(ha-Ga)T(Σh+(TQ0)Qx)-1·
Qx(Σh+(TQ0)Qx)-1(ha-Ga),
(27)
(28)
通過推導可知,本文所提基于WTLS的方法充分利用了誤差的先驗信息得到估計值,但是WTLS問題目前無法得出解析解,只能通過迭代的方法進行數值求解。若得到測量值G=Ga+ΔG,h=ha+Δh,則算法迭代過程如下:
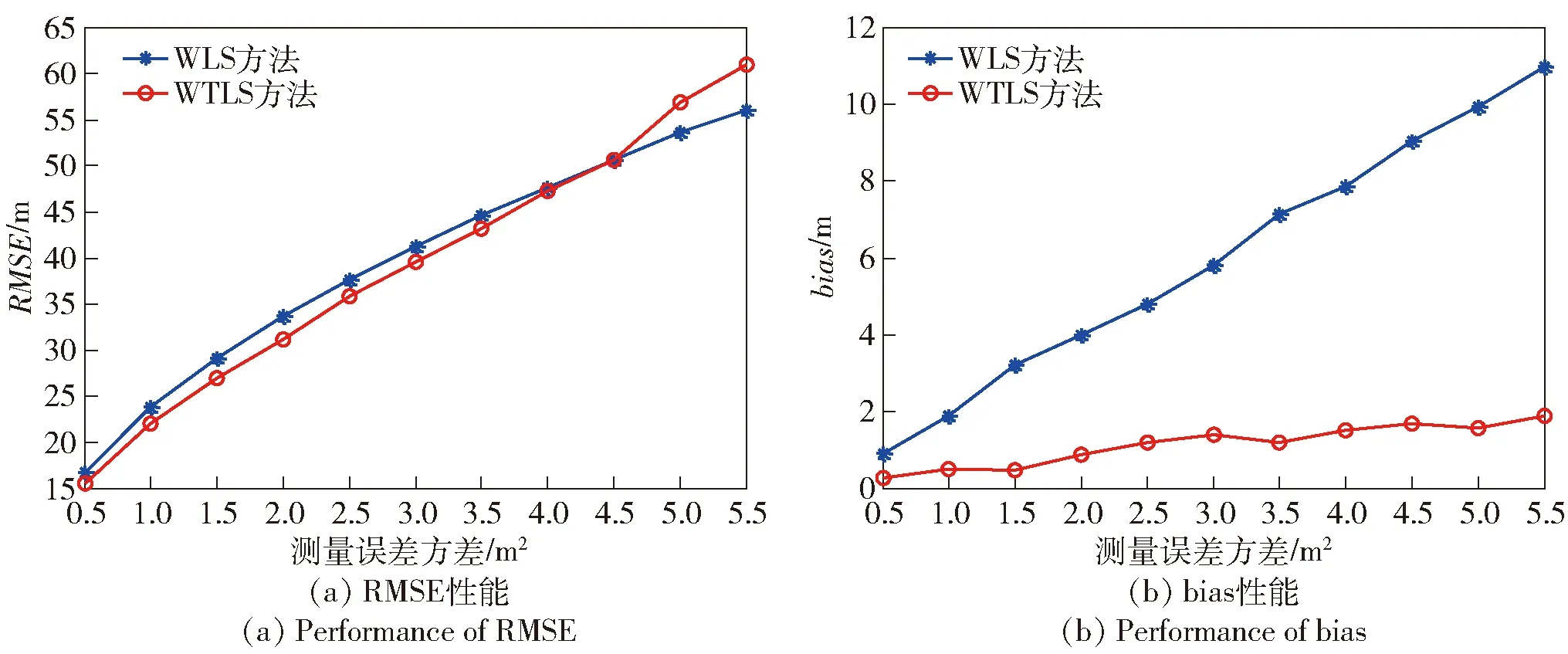
圖2 傳感器節點無誤差時測量誤差對估計性能的影響Fig.2 Influence of measured error on estimation performance when sensor node has no error
步驟1未知量的初次迭代值
(1)=(GT(Σh+((0)TQ0(0))Qx)-1G)-1·
GT(Σh+((0)TQ0(0))Qx)-1h.
步驟2給出迭代過程中要求解的兩個迭代量(i)和(i),i表示迭代次數,
(i)=(h-G(i))T(Σh+((i)TQ0(i))Qx)-1·
Qx(Σh+((i)TQ0(i))Qx)-1(h-Ga(i)),
(i+1)=(GT(Σh+((i)TQ0(i))Qx)-1G-(i)Q0)-1·
GT(Σh+((i)TQ0(i))Qx)-1h.
步驟3重復步驟2,給出一個閾值ε,當‖z(i+1)-z(i)‖<ε時,計算結束。
步驟4輸出結果z(i+1)的前兩項,即為u目標真實位置的值。
3 定位方法性能及復雜度仿真和試驗
3.1 定位方法性能評價指標
評價定位方法性能的指標通常用均方根誤差(RMSE)和偏差(bias),其定義分別為
(29)
(30)
3.2 誤差大小對估計性能影響的仿真及分析

不同誤差大小對定位性能影響的仿真結果如下:
1)節點位置無誤差時,測量誤差對目標定位性能的影響如圖2所示。
2)節點位置誤差的方差分別為0.01 m2、0.50 m2和3.00 m2時仿真結果如圖3所示。
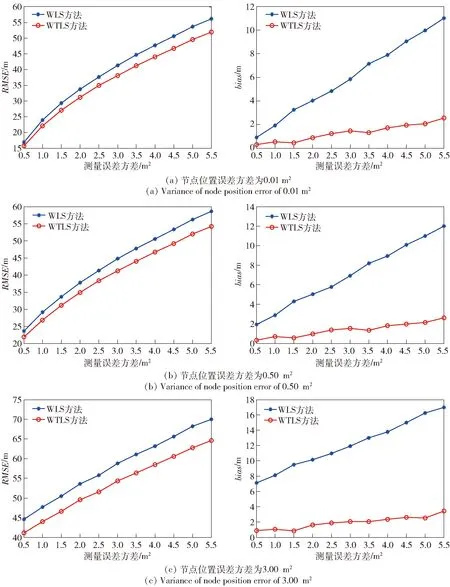
圖3 傳感器節點位置誤差方差一定時測量誤差對估計性能的影響(左為RMSE性能,右為bias性能)Fig.3 Influence of measured error on the estimation performance when the position error variance of sensor node is constant (left:performance of RMSE;right:performance of bias)
3)測量誤差分別為0.01 m2、0.50 m2和3.00 m2時的仿真結果如圖4所示。
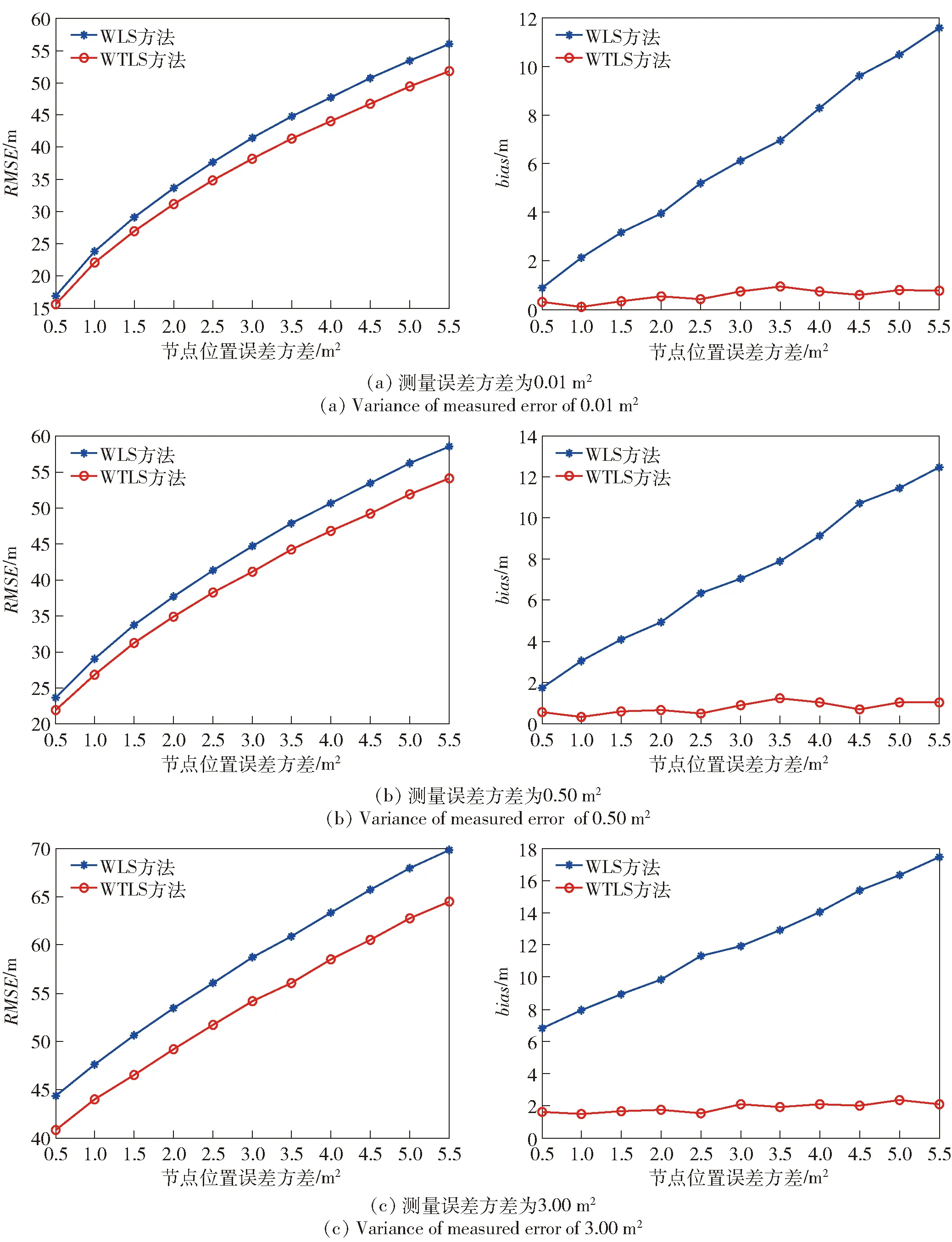
圖4 測量誤差方差一定時傳感器節點位置誤差對估計性能的影響(左為RMSE性能,右為bias性能)Fig.4 Influence of position error of sensor node on estimation performance when the measurement error variance is constant (left:performance of RMSE;right:performance of bias)
從圖2~圖4中可看出:隨著誤差的增大,兩種方法對節點估計的均方根誤差也隨著增大,WTLS方法的均方根誤差略小于WLS方法;WTLS方法的偏差比WLS方法的偏差小很多。究其原因,是因為WTLS方法的模型更準確。
從圖2中可看出,當節點位置準確時,WTLS方法和WLS方法的均方誤差基本相當,而WTLS方法的偏差比WLS方法小。這是因為WTLS方法的模型考慮了乘性誤差,而WLS方法的模型未考慮乘性誤差,即使Chan算法兩次運用最小二乘法,對估計偏差性能的提高有限。
對比圖3和圖4可以看出:節點位置誤差和測量誤差的大小對兩種方法的目標估計均方根誤差影響基本相同,這是因為在雙誤差模型(7)式中的乘性矩陣和加性矩陣中均包含有節點位置誤差和測量誤差;當測量誤差一定時,節點位置誤差的大小對WTLS方法的偏差影響較小,這是因為WTLS方法的模型更精確。
3.3 節點個數對估計性能影響的仿真及分析
節點位置誤差和測量誤差的方差均為0.50 m2,節點個數從3~12變化,3.2節中其他仿真條件不變時的仿真結果如圖5所示。
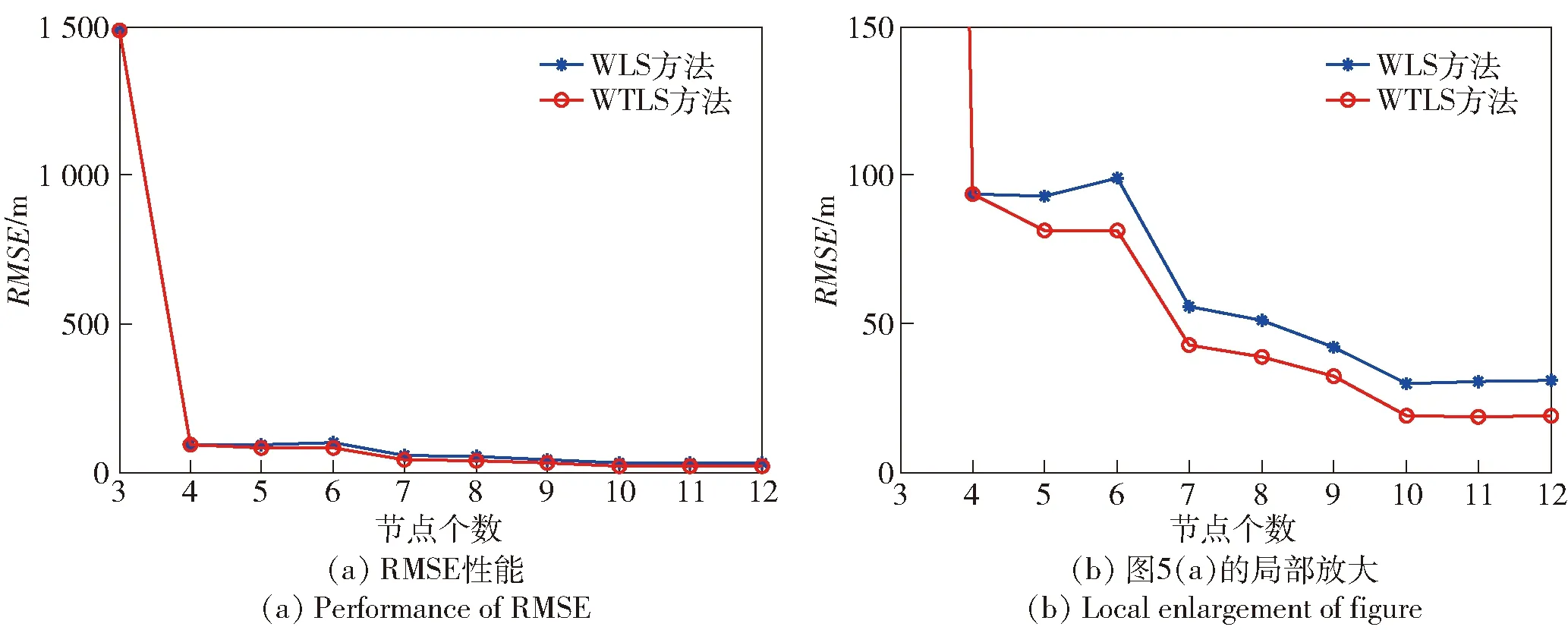
圖5 傳感器節點個數對估計性能的影響Fig.5 Influence of the number of sensor nodes on the estimation performance
由圖5可知,節點個數的多少對兩種方法性能的影響基本相當。當節點個數由3增加到4時,兩種估計方法的性能均有很大提升,但當節點個數繼續增大時,估計性能提升值很小。這是因為雖然節點個數的提升可提高估計性能,但是每個節點都是有誤差的,節點的誤差又影響了估計的性能。
3.4 定位方法復雜度仿真和分析
對于WLS和WTLS兩種定位方法的復雜度,本文采用相對計算時間來衡量,在i5-6500處理器的Win7_64位臺式計算機上,用MATLAB2014b軟件完成復雜度比較的仿真。
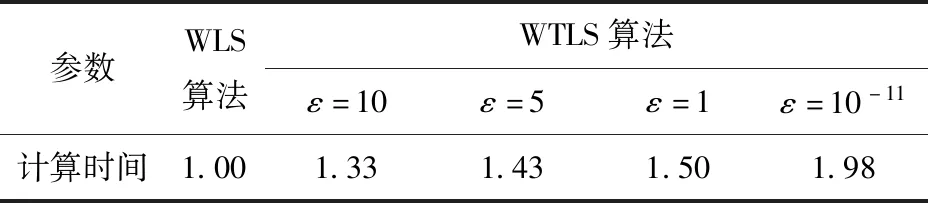
表1 WLS和WTLS的相對計算時間比較Tab.1 Comparison of relative computation times of WLS and WTLS
表1中,對WLS和WTLS中ε取不同值時的相對計算時間進行了比較,將WLS的計算時間作為1.00,WTLS中ε=10、ε=5、ε=1、ε=10-11時的相對計算時間分別為1.33、1.43、1.50、1.98.從表1中的數據可以看出,WTLS的計算時間要多于WLS的計算時間,隨著閾值ε減小,WTLS的計算時間在增加,但同時定位性能也在改善。因此,算法定位性能和計算時間要統籌分析,根據需求選擇算法對應的ε值。
3.5 定位方法的水池試驗和結果分析
為了驗證本文所提WTLS法的定位效果,在西北工業大學消聲水池進行試驗驗證。水池試驗現場和節點如圖6所示,其中:圖6(a)是水池試驗現場,水池長20 m、寬8 m、深7 m、水深6.8 m;圖6(b)是試驗用的節點,布放在水深3 m處,共有5個節點,將其中1個節點作為待定位的目標,其他節點作為網絡節點。
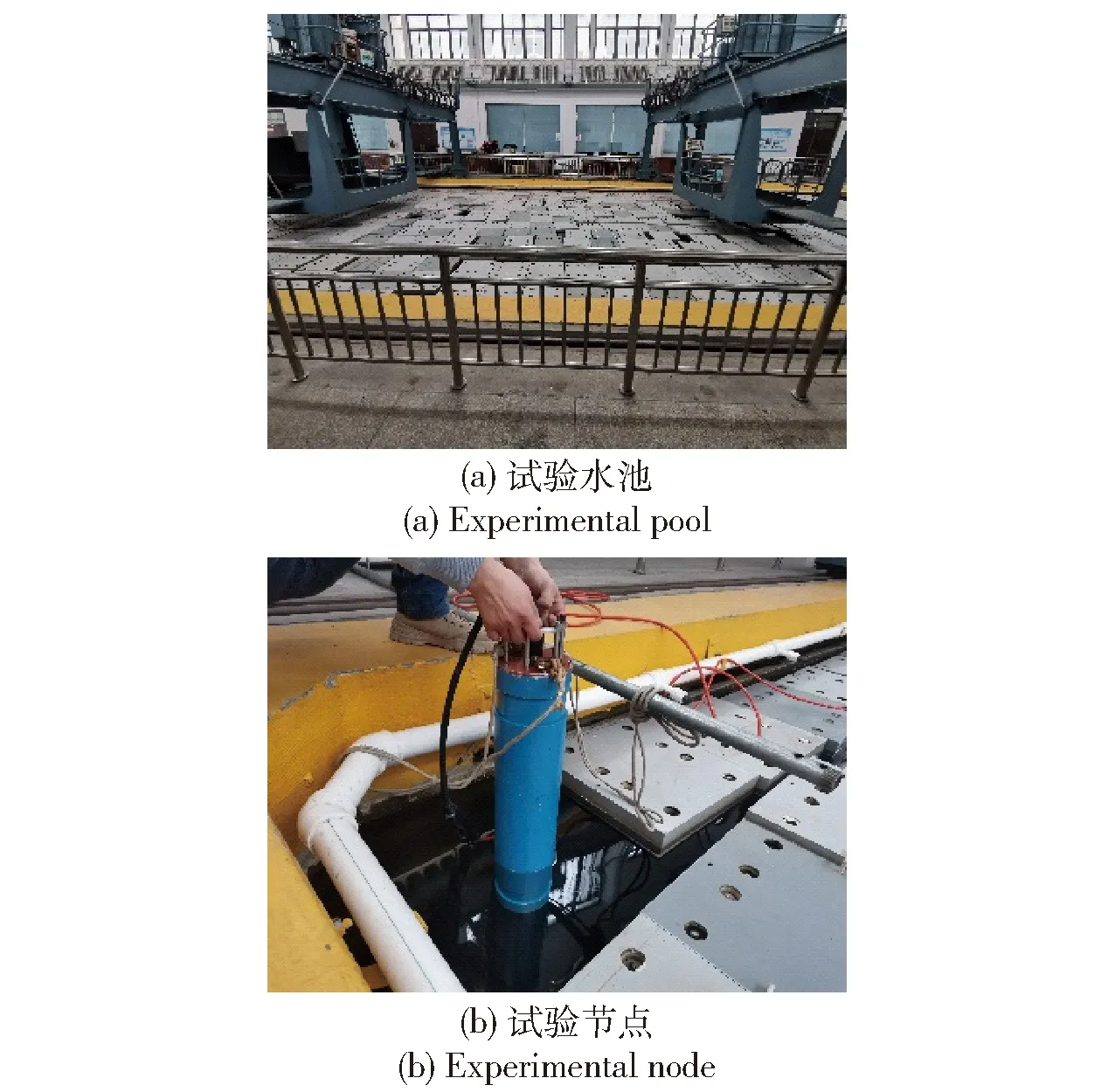
圖6 水池試驗現場和節點Fig.6 Experimental site and node


表2 WLS和WTLS試驗效果比較Tab.2 Comparison of experimental results of WLS and WTLS m
從表2中可以看出,WLS、WTLS方法的性能都比較好。除算法本身之外,本文設計的試驗節點具有偏差補償的功能。表2中,對比來看,在RMSE、bias方面,本文提出的WTLS定位效果都要比WLS定位效果好。
4 結論
針對水聲傳感器網絡目標定位中傳感器節點位置誤差大不能忽略的情況,同時考慮測量誤差及傳感器節點位置誤差,本文構造了雙誤差條件下的TDOA目標定位模型。采用該模型,提出一種基于WTLS的求解算法,推導出協方差矩陣的表達式并給出定權方法。基于Lagrange乘數法,推導出迭代表達式,給出求解步驟。
本文所提方法在模型上同時考慮了兩種誤差,在求解方法上利用了誤差的先驗信息,仿真和水池試驗結果均表明:雙誤差條件下WTLS目標定位方法的RMSE和bias均小于WLS方法的RMSE和bias.
猜你喜歡
中老年保健(2021年9期)2021-08-24 03:52:04
河北畫報(2021年2期)2021-05-25 02:07:46
中學生數理化(高中版.高考理化)(2020年2期)2020-04-21 05:33:04
兒童繪本(2020年5期)2020-04-07 17:46:30
兒童故事畫報(2019年5期)2019-05-26 14:26:14
Coco薇(2016年2期)2016-03-22 02:42:52
山東青年(2016年1期)2016-02-28 14:25:23
Coco薇(2015年1期)2015-08-13 02:47:34
小雪花·成長指南(2015年7期)2015-08-11 15:03:12
小雪花·成長指南(2015年4期)2015-05-19 14:47:56
