無人機交通管理中路徑規劃策略研究綜述*
2020-04-18 02:23:22黃靜洋付小蓉潘衛軍
科技與創新 2020年6期
黃靜洋,付小蓉,潘衛軍
無人機交通管理中路徑規劃策略研究綜述*
黃靜洋1,付小蓉2,潘衛軍1
(1.中國民用航空飛行學院 空中交通管理學院,四川 德陽 618307;2.中國民用航空飛行學院洛陽空管站,河南 洛陽 471001)
如今無人機被廣泛使用,在無人機空中交通管理中,路徑規劃是極其重要的一環。對無人機路徑規劃的自動控制策略的國內外研究現狀進行了綜述,簡單介紹了無人機的控制系統和目前認可度較高的無人機交通管理系統,分別對單機飛行的路徑預規劃策略、多機協同飛行的任務規劃及協同策略和無人機飛行中動態避障策略三個方面現有研究進行整合分析。三方面的綜述基本涵蓋了國內外無人機相關路徑規劃的控制策略,并比較了常用策略的適用場景。
無人機;路徑規劃;協同控制;避障策略
近年來,由于無人機成本較低,人員傷亡風險低,機動性好,在民用和軍事上都有廣泛用途,人們研究無人機的熱度持續上漲[1]。無人機可代替人類進行一些特殊任務,比如2020年初新型冠狀病毒疫情期間,一些城鎮使用無人機進行派件和發放物資。然而由于目前無人機的監管體系并不完善,2016—2018年出現了多次無人機“黑飛”,產生了惡劣的影響,這給空中交通管理體系敲響了警鐘[2]。要適應嚴格的管控體系,無人機交通管理系統中的相關技術十分重 要[3-4]。因此,針對小型無人機的空中交通管理系統的探討日益激烈,國內外多次召開相關討論會議,眾多學者針對無人機的管控體系和關鍵技術進行了研究。較歐美發達國家,中國在無人機領域起步較晚,近年來在規章制度和技術方面進步很大,但仍有不足。能夠自主執行任務,且滿足交通管理要求,是無人機今后發展的必然趨勢,路徑規劃是無人機空中交通管理系統中重要組成部分。能夠采用合適的路徑規劃方法,合理地避障和執行任務,提高生存能力,是無人機發展面臨的重要挑戰之一。本文對國內外無人機交通管理中路徑規劃策略進行總結梳理,旨在為后續廣大學者在此方面的研究及相關部門對管控體系的發展提供參考和借鑒。
1 無人機控制系統及交通管理系統
1.1 無人機控制系統
無人機控制系統通常可以稱為飛行控制系統,也是無人機的核心系統,相當于無人機的“大腦”。該系統的作用主要是控制機體的起飛、著陸、姿態和方向,使無人機按照指定的航跡飛行,完成分配的任務,且在此過程中進行避障。現在民用無人機的飛行控制系統一般是按照遙控指令進行控制,如果無指令或無法收到指令,則按照既定方案執行。軍用無人機的執行任務更為復雜,對無人機的控制要求也更高,除單機執行任務外,還需要能夠多機協同完成任務。
目前較常見的無人機為旋翼機,旋翼機與固定翼飛機飛行的空氣動力學原理一樣,都是利用不同流速空氣靜壓不同從而控制飛機升空飛行[5]。與固定翼飛機不同的是,旋翼機的機翼速度遠遠大于機身速度,這使得旋翼機相比較于固定翼飛機有更大的負重能力和更好的靈活性,能夠處理一些特殊的工作任務。本文以旋翼無人機為主要研究對象,旋翼無人機系統結構如圖1所示。
如圖1所示,旋翼無人機系統包括數據采集模塊、數據處理模塊、控制器、執行機構、遙控模塊和無人機機體(包括任務裝置設備)。數據采集模塊通過幾種器件可以采集到無人機的位置、高度、姿態和加速度,數據處理模塊接收到這些數據信息以及遙控器接收到的數據后對其進行處理,再將處理后的信息傳給控制器。控制器根據接收到的信息和設計好的控制算法,將控制指令發送給執行機構,包括轉換器和無刷電機,從而控制無人機的運動。
無人機控制器系統如圖2所示,包括前端采集模塊、中央處理模塊、控制執行模塊和被控對象。系統的前端采集模塊用于采集周圍環境信息、自身姿態和位置信息,這些信息發送給中央處理模塊,中央處理模塊將信息處理后得到控制信息,再發送給控制執行模塊。此控制信息經控制執行模塊轉化為運動動作,控制被控對象的運動。

圖2 無人機控制系統框圖
1.2 無人機交通管理系統
中國民航已經有較為完善的體系和較為顯著的發展,但目前中國尚無一個完善的無人機交通管理系統,已有不少業內人士針對無人機的交通管理系統進行了研究和展望,這些研究各有想法,分別從不同方面進行了分析。無人機的交通管理系統應該包含飛行計劃申請和審批系統、數據中心、管制系統和監視系統,文獻[6]提出一種系統構架,如圖3所示。系統基于北斗RDSS和ADS-B的監視信息,將無人機的飛行計劃數據和監視數據傳送至數據中心,數據中心對這些數據進行融合處理,管制系統根據無人機的數據進行管制,同時也將管制信息傳送回數據中心。管制系統內的管制員和管制中心通過管制員工作站進行數據交互,如果遇到緊急情況,通過網絡將應急信息發送至無人機的管控平臺。
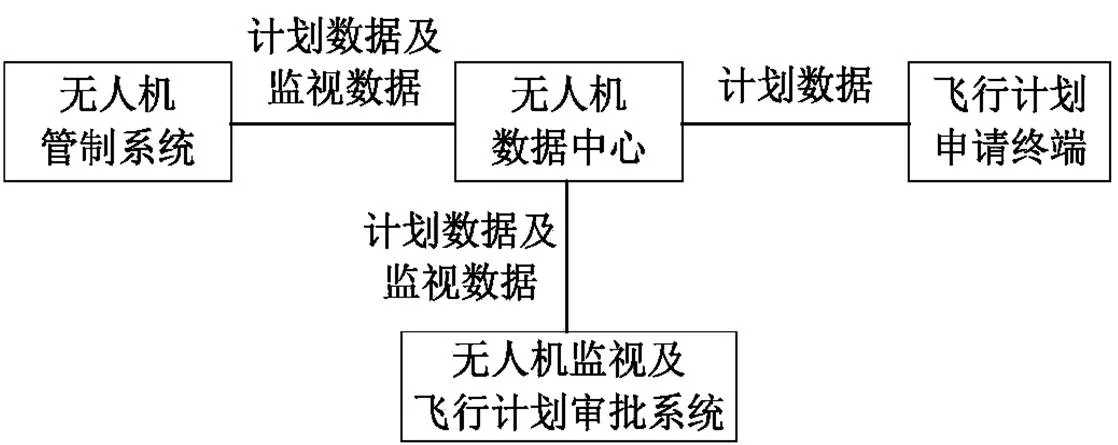
圖3 無人機交通管理系統框圖
無人機的管控系統要能夠實現四種功能:無人機的注冊審批、數據接收與發送、飛行任務監管與違規報警、任務統籌規劃[7]。也有研究人員從技術層面分析了無人機的交通管理系統,以自主感知避讓、地理圍欄、統一的飛行規則等技術構成安全技術層[3],可以將無人機按飛行高度、無人機大小等進行分類[8],再通過這些技術在已劃定好的無人機禁飛區、限制區、開放區等對無人機進行管控。
2 單機路徑預規劃策略
在無人機的管控系統中,首先需要對無人機的飛行進行路徑規劃,包括預規劃和實時動態規劃,如果只通過無人機飛行員操控無人機的飛行航跡,那么將不能實施統一的管制調配,需要管控系統對其進行規劃,或需要其所有人進行規劃后上報管控系統進行申請。預規劃通常是在無人機所有人提交飛行計劃申請時對其計劃的飛行任務進行路徑規劃。有人機在空域內有規定的航路航線,除緊急情況外必須按航路航線和規定的飛行高度層飛行,無人機也需要按照既定的航路航線和高度飛行。在預規劃中需要考慮轉彎點、能耗和已知固定障礙物,通過一系列計算使得路徑最優。如果無人機在飛行過程中遇到緊急情況,或飛行任務發生變化、環境信息發生變化等,需要改變既定的航路,需要管控系統對其進行實時改航規劃,這種航跡規劃通常以避障為主,所以本節主要分析路徑的預規劃。
2.1 基于遺傳算法的路徑規劃
在無人機路徑的預規劃中,應該充分考慮已知地形和障礙物的信息,首先對地形進行建模,對于數字地圖的模擬函數有很多,在本文中不做贅述。在地形建模后,應該根據地形數據,形成一系列航跡點,進而對無人機的路徑進行預規劃。在路徑規劃方面,遺傳算法是一種較為主流的算法,已經有學者陸續使用該算法或基于該算法的改進算法對無人機進行了路徑規劃[9-12]。在該算法及其改進算法中,首先對航路進行編碼,文獻[10]和[11]都采用一維編碼表示路徑,文獻[9]采用二維編碼表示路徑。雖然一維編碼在迭代計算上較為簡單,但將無人機運行的三維空間簡化為二維,對于反映無人機的運動不夠精確,而二維編碼能更有效精確地反映無人機的運動過程。對于任務較為單一、路徑較短、環境簡單的飛行任務,可以選擇較為簡便的一維編碼,對于任務復雜、任務要求高、路徑較長、所經路徑環境多變的飛行,可以選擇精確度較高的二維編碼。
在使用遺傳算法進行問題的求解時,除了選擇合適的編碼方式,還要選擇合適的終止條件和適應度函數,以及合理的復制、交叉、變異的遺傳操作[13]。通常情況下,無人機的路徑預規劃既要達到最快、能耗最小抵達任務點的目標,又要能夠在途中規避威脅和已知障礙物。所以將這兩點考慮在內的目標函數所產生的適應度函數是個體選擇的標準,采用遺傳算法的大多數規劃策略都是以此為基礎的。
在遺傳求解中,文獻[9]對選擇,即復制的過程進行了改進,先對所有個體的適應度進行排序,只復制適應度高的個體。同時在變異的過程中加入變異算子,改變相鄰兩個航路點的橫縱坐標的距離較大時,細化其變化量的表達式。這樣的改進雖然簡單,但可以加強無人機運行的穩定性,并加速算法的收斂過程以盡快達到最優解。
文獻[10]的算法改進核心是分別對多個種群使用不同的控制參數,在每一次迭代后進行移民和人工選擇,直到得到精華種群中的最優個體,改進遺傳算法如圖4所示。這種用種群中最優個體代替臨近種群中最劣個體的操作,可以得到一個精華種群,而精華種群是遺傳的終止條件,同時也不進行復制、交叉、變異的遺傳操作。經仿真驗證后得到的結果證明該方法有助于提升穩定性,但需要更長的時間運算。
另外還有研究將傳統遺傳算法與其他算法相結合,以改善傳統遺傳算法的劣勢[12]。例如將遺傳算法與模式搜索法相結合,先使用遺傳算法全局搜索,達到終止條件后,令模式搜索法的起始基點等于遺傳算法所得的最優解,初始步長等于最優解和最差解的差值,進而使用模式搜索法進行局部搜索。這種方法所得到的最優路徑精度更高,更穩定,適合在無人機禁飛區、限制區和威脅區較多的地區或地形較復雜多變的地區使用。
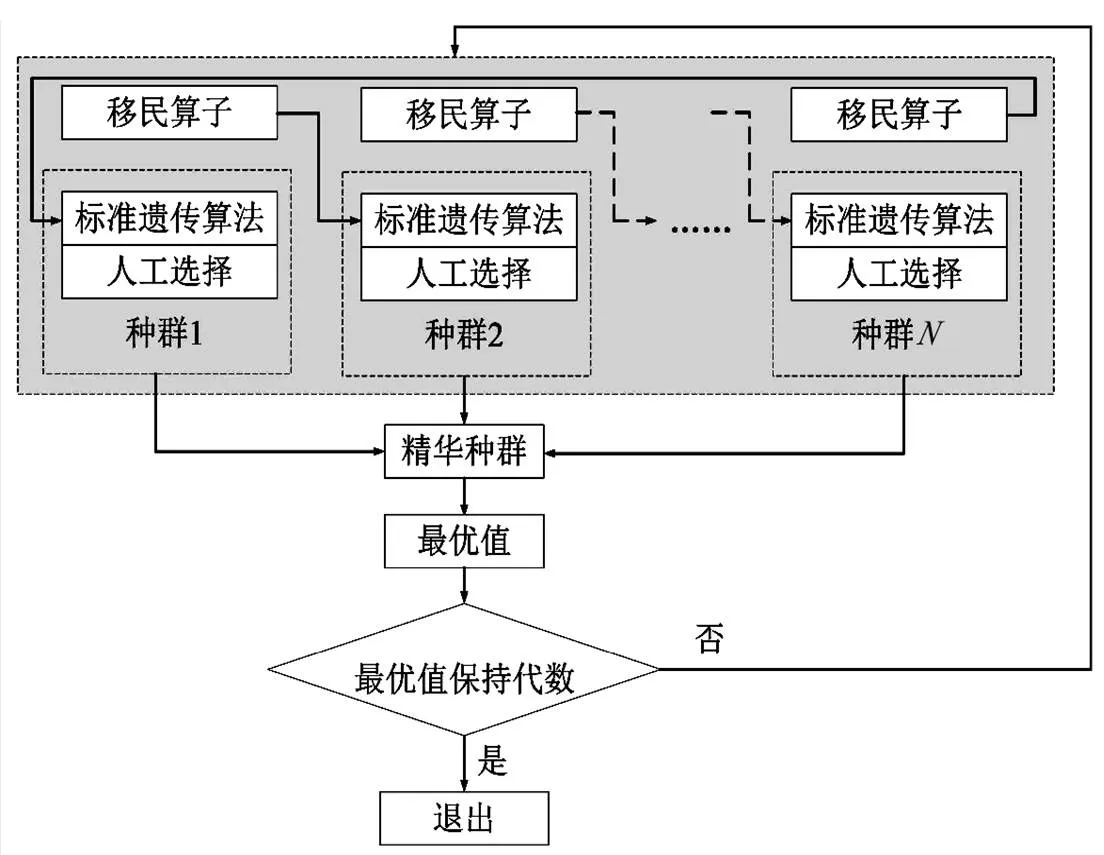
圖4 改進遺傳算法
通過以上的文獻和分析可以知道,由于傳統的遺傳算法尋優精度較低,穩定性不高,但通用性強,全局搜索能力強,通過對遺傳算法進行改進,或結合其他算法共同使用,可以改善遺傳算法的缺點,提高適用性。
2.2 路徑規劃其他策略
除了遺傳算法這種常見的無人機路徑規劃策略外,還有一些其他使用較多的算法,比如人工勢場法、蟻群算法、粒子群算法、VORONOI圖法等,這些算法難易程度不同,也各有優缺點,適用范圍也不盡相同。
人工勢場法是將無人機的運動空間看作虛擬勢場,而將其中的運動看作在勢場中引力和斥力作用下的結果,即無人機飛行的目標點對其產生引力,障礙物或威脅區對其產生斥力,無人機就在這樣的合力下向目標點運動。根據確定的目標點和已知的障礙物或威脅區位置,建立引力勢場函數和斥力勢場函數。這種人工勢場法比較簡單,計算時間也比較短,但是容易陷入局部最優而收斂不到目標點,所以也有不少研究改進了人工勢場法,比如將力矢量改為勢場強度、在勢場函數中添加系數項[14]、在障礙物附近設置旋轉矢量[15]、在設置預規劃路徑的基礎上計算多條候選路徑、建立代價函數選擇最優的候選路徑[16-17]。
蟻群算法也是如今比較常見的人工智能算法,有人將其應用于無人機的路徑規劃中。蟻群算法的核心思想是,設置螞蟻的數量,當螞蟻從某條路徑經過時會留下信息素,路程越近信息素的信號強度越大,被后續螞蟻選擇的可能性越大,相應的,同一路徑上經過的螞蟻越多,信息素就越多,信號強度會不斷疊加,又會有更多螞蟻選擇此路徑,如此迭代下去最終會形成一條絕大多數螞蟻都選擇的最短路徑。此方法需要設置螞蟻狀態轉換規則和信息素更新規則,但蟻群算法收斂的速度較慢,計算復雜程度在區域擴大時會大幅增長,容易陷入局部最優,因此也有不少學者對蟻群算法進行改進以改善這些缺點[18-21]。可以改進蟻群算法的初始狀態,以其他算法獲得的路徑作為蟻群算法的初始解,以提高收斂速度,縮短搜尋路徑,這樣的改進適合于山峰較為密集、區域面積較大的山區;也可以對傳統蟻群算法的狀態轉換規則和信息素更新規則進行調整,在提升整體搜索能力的同時保持較高的收斂速度。
粒子群算法也是一種進化算法,由鳥群捕食衍生而來,最優解相當于鳥群的食物源,各粒子分散搜尋,相互傳遞消息,通過迭代后集中在最優解,達到收斂。其中的流程是先初始化粒子群中各粒子的位置、速度,建立適應度函數,尋找個體極值,得到全局最優解,據此更新粒子的位置和速度。為防止該算法陷入局部最優,也可以結合其他算法對部分粒子進行其他操作,比如引入差分進化、量子行為等[22-24]。結合其他算法的粒子群路徑規劃策略,由于不需要遺傳算法所用的交叉和變異操作,相對來說比較簡單,收斂速度也比較快,適用于三維環境的路徑規劃。
VORONOI圖法主要是根據威脅和障礙物的分布情況建模,形成無人機的航路集合,計算航路代價后,在VORONOI圖的基礎上利用一些搜索算法,如dijkstra搜索算法,得到初始最優路徑,之后采用B樣條、三次樣條,或序列二次規劃等方法得到無人機最終最優路徑[25-27]。
3 多機任務規劃策略
許多任務不僅需要無人機完成,還需要多架無人機協作自主完成,比如作戰任務、市政工作、物流等。多機協同完成任務,與單機任務不同的是,單機只需要完成自身的路徑規劃即可,但多機協同時,需要考慮到綜合最優路徑組合和任務分配的最優方式。此時需要構建一個多無人機的網絡系統,滿足各無人機之間的信息交互、傳遞、綜合處理等要求。
可以使用改進后的單機路徑規劃的人工勢場法、粒子群算法或A*算法等進行多機任務規劃[28-31],共同點是要考慮無人機的數量和各無人機完成任務的程度。目前在多機協作中研究較多的是基于Agent的任務分配和規劃策略,Agent是一種軟硬件系統,具有駐留性、自主性、反應性和能動性,常用在分布式應用系統。文獻[32]提出了一種基于多Agent的算法,該算法分為兩個階段:①根據約束條件,使無人機遍歷目標點,逐步增加無人機Agent數量,根據終止條件判斷是否完成任務,得到初始可行解;②基于多Agent的算法流程,如圖5所示。在初始可行解的基礎上,第一架無人機是路程時間最短的,第架是返回時間最長的,根據此流程逐步逼近最終的最優解。相較于其他方法,基于Agent的策略可擴展性較強,適用于編隊中無人機的數量較多、目標點較多、出發地較多的情況。
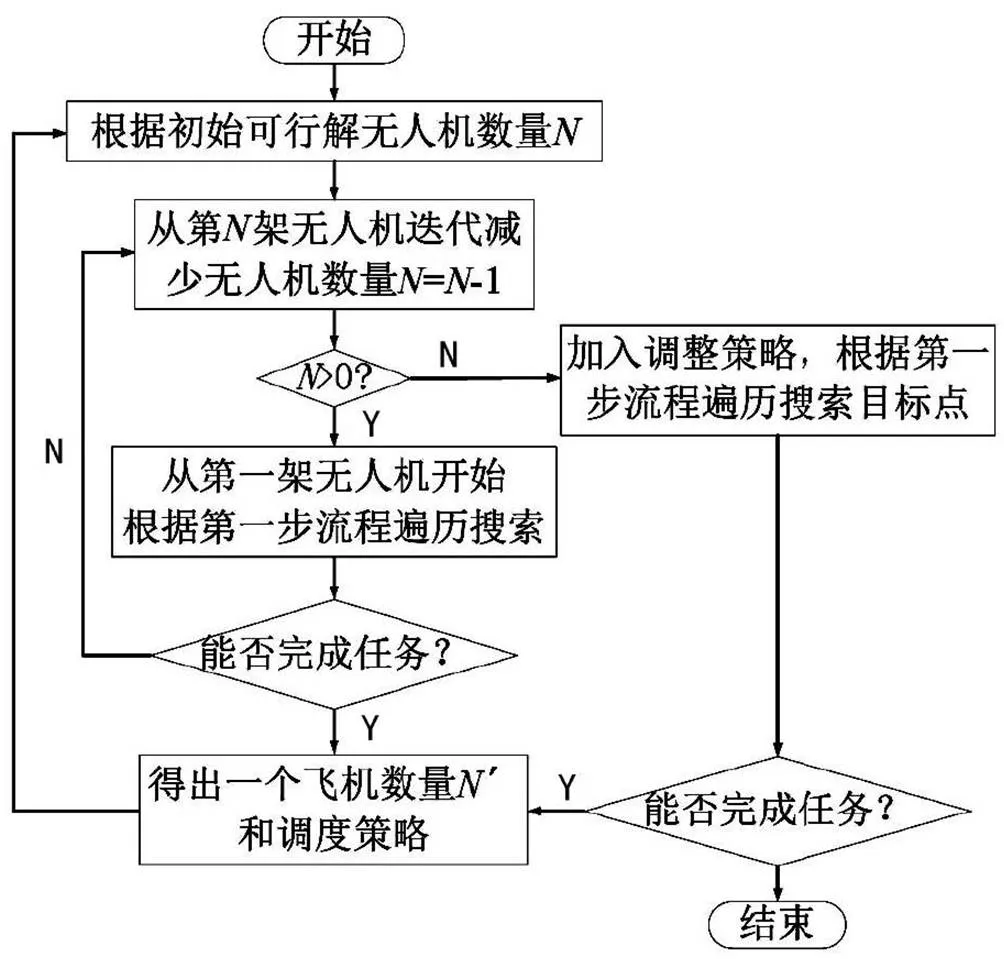
圖5 基于多Agent的算法流程
如果執行編隊飛行任務的無人機目標點一致,需要控制編隊中各無人機間的間隔、相對位置等,可以采用“長機-僚機”法等。這些算法更偏重于編隊的整體性和協調性。文獻[33]提出了一種分布式控制策略,在三維環境中僚機知道自己與長機的相對位置,而長機不需要知道僚機的相對位置,這種控制策略較為簡單,編隊中任意一架無人機均可作為長機,但僚機對長機缺少實時反饋。文獻[34-35]采用的編隊控制方法基于人工勢場的改進策略,人工勢場法的基本思想在前文已介紹過,這里的改進算法中加入了僚機和長機的虛擬力,長機對僚機產生一定的引力,僚機之間產生一定的斥力,以此保持編隊隊形,共同避開障礙物,向同一目標點飛行。
基于人工勢場的編隊控制策略模型如圖6所示,以構成三角形的三架無人機為例,此三架無人機均為僚機,在三角形中間增加一架虛擬長機,控制長機所受的阻力進行避障。如果在該算法中加入平滑改進算法和約束條件,可以使編隊保持良好的穩定性和魯棒性。
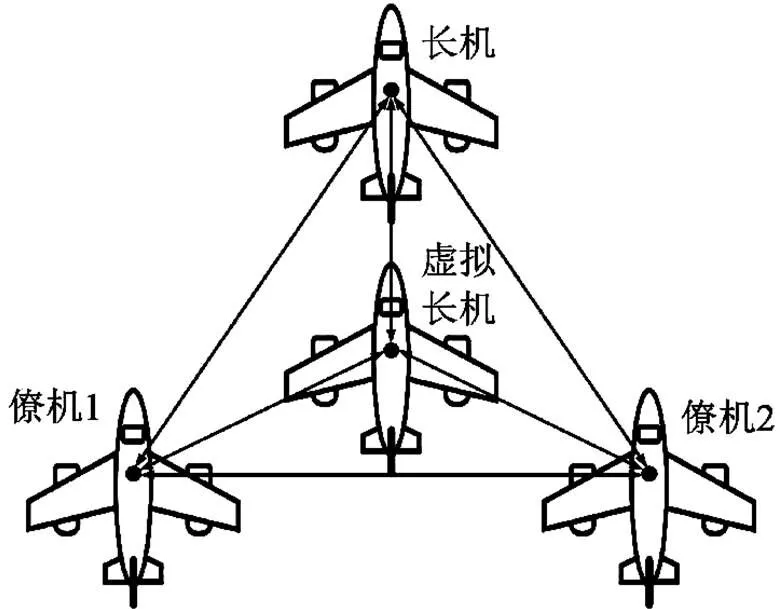
圖6 基于人工勢場的編隊控制策略模型
4 動態避障控制策略
無人機的動態避障也可以稱為無人機的感知與避障,是無人機在飛行過程中進行檢測和規避障礙物的功能。無人機感知障礙物,可以通過空中交通管制提供的管制服務、飛行情報服務和告警服務實現,也可以通過機載傳感器,包括紅外傳感器、雷達、視覺傳感器等實現。
本節主要針對無人機在感知臨時障礙物后的避障控制策略進行綜述。
在無人機的動態避障中,需要判斷障礙物是相對地面靜止的還是運動的、與無人機的相對運動速度、距障礙物的距離、威脅等級等,根據這些信息采取合理的避障措施。文獻[36]分析了無人機的類型,為不同類型的無人機設置了安全間隔。根據安全間隔可以為無人機設置飛行安全包絡和避障區域。當運動障礙物進入到無人機的避障區域后,無人機系統會檢測到此障礙物,文獻[37]提出了在規避障礙物后重新回到起始航跡飛往目標點的簡單算法。文獻[38]采用的是前文所述的人工勢場法,在障礙物進入雷達檢測到的威脅距離時控制無人機進行減速,之后雙目視覺可以檢測到障礙物,無人機采取避障措施,采用人工勢場法得到新目標點,無人機飛往新目標點以規避障礙物,規避后再回到原航點或原航線。文獻[38]在使用單目視覺采集的圖像進行信息處理后,使用動態變換概率策略對花授粉算法進行改進,得到新目標點最優解。
在這些動態避障系統中,雙目視覺檢測障礙物的距離較短,雷達等可以遠距離檢測障礙物,由空中交通管制服務提供信息較為全面,需要加強地空通信功能。在感知障礙物后,可以采取路徑規劃中時所采用的人工勢場法及其改進算法、粒子群法及其改進算法、蟻群算法及其改進算法等智能算法規劃出新的目標點或新路徑進行動態避障,其中較為簡單,實用性較強的為人工勢場法,在到達新目標點規避障礙物后回到原航線繼續飛行,也更符合空中交通管理規則對民航飛機的避障規定。
5 結論
本文針對無人機交通管理中的路徑規劃策略,分別從單機的路徑規劃、多機飛行的任務規劃和動態避障三方面的研究進行整理分析。目前研究較多的規劃策略是一些智能算法及相應的改進算法,文中對比了其中幾個較為主流的算法,以及他們適用的應用場景。在路徑規劃中人工勢場法實用性最強,原理也較為簡單,但容易陷入局部最優,可以采用改進算法改善此缺點并加快收斂速度。遺傳算法通用性強,全局搜索能力強,通過改進也可以改善尋優精度低、穩定性差的缺點,但算法操作比較復雜。粒子群法相較于遺傳算法等更為簡單,但也容易陷入局部最優,可以結合其他算法進行改善,同時適用于三維環境建模的系統。在多機飛行任務中,多Agent系統適用于隊內無人機目標點不同、出發點不同或任務不同的多機飛行,而編隊整體飛行時,需要確定長機與僚機以及互相之間的相對位置。本文在進行這些整合分析后,可以為未來無人機及其空管系統的發展打下理論基礎,提供技術參考,在有人機和無人機的融合方面,根據無人機的路徑規劃策略技術可以減輕管制上的壓力,更好地對空域和航線進行分配。
[1]程翔.城市大容量無人機航線管控體系[J].中國高新科技,2019(15):58-61.
[2]錢季平.禁飛管制:無人機管理的現實選擇和有效途徑[J].環球市場,2016(13):97-98,106.
[3]付其喜,梁曉龍,張佳強,等.無人機低空交通管理系統綜述[J].飛行力學,2019,37(2):4-9.
[4]解龍.無人機關鍵技術[J].中國新通信,2018,20(1):94-95.
[5]王艷紅,肖彥海.小型無人機姿態系統的變論域模糊控制[J].自動化技術與應用,2008(9):14-17.
[6]王雪峰,胡瀟,楊明,等.無人機空管領域現狀分析與空管系統設計[J].現代導航,2016,7(5):330-334.
[7]任麗艷,李英成,薛艷麗,等.基于北斗技術的無人機飛行監管系統開發與應用[J].國土資源遙感,2018,117(2):241-245.
[8]于清媛.管制區域無人機防碰撞技術研究[D].德陽:中國民用航空飛行學院,2018.
[9]李楠,劉朋,鄧人博,等.基于改進遺傳算法的無人機三維航路規劃[J].計算機仿真,2017,34(12):22-25,35.
[10]魚佳欣,周春來,劉東平.改進遺傳算法的無人機航路規劃與仿真[J].計算機仿真,2013(12):23-26.
[11]袁麟博,章衛國,李廣文,等.一種基于遺傳算法-模式搜索法的無人機路徑規劃[J].彈箭與制導學報,2009,29(3):285-288.
[12]VOLKAN P Y,BAYSAL O,HACIOGLU A.Path planning for autonomous UAV via vibrational genetic algorithm[J].Aircraft Engineering and Aerospace Technology,2007,79(4):352-359.
[13]ROBERGE V,TARBOUCHI M,LABONTE G .Comparison of parallel genetic algorithm and particle swarm optimization for real-time UAV path planning[J].IEEE Transactions on Industrial Informatics,2013,9(1):132-141.
[14]于振中,閆繼宏,趙杰,等.改進人工勢場法的移動機器人路徑規劃[J].哈爾濱工業大學學報,2011,43(1):50-55.
[15]CHANG K,XIA Y,HUANG K .UAV formation control design with obstacle avoidance in dynamic three- dimensional environment[J].SpringerPlus,2016,5(1):1124.
[16]毛晨悅,吳鵬勇.基于人工勢場法的無人機路徑規劃避障算法[J].電子科技,2019(7):65-70.
[17]丁家如,杜昌平,趙耀,等.基于改進人工勢場法的無人機路徑規劃算法[J].計算機應用,2016(1):287-290.
[18]焦振江,王正平.基于改進蟻群算法的無人機航路規劃[J].航空計算技術,2006(4):112-114,118.
[19]唐立,郝鵬,張學軍.基于改進蟻群算法的山區無人機路徑規劃方法[J].交通運輸系統工程與信息,2019,19(1):158-164.
[20]金飛虎,洪炳熔,高慶吉.基于蟻群算法的自由飛行空間機器人路徑規劃[J].機器人,2002(6):47-50.
[21]WEN Y E,DENG-WU M A,FAN H D.Algorithm for low altitude penetration aircraft path planning with improved ant colony algorithm[J].Chinese Journal of Aeronautics,2005,18(4):304-309.
[22]于鴻達,王從慶,賈峰,等.一種基于差分進化混合粒子群算法的多無人機航跡規劃[J].電光與控制,2018,239(5):26-29.
[23]張航,劉梓溪.基于量子行為粒子群算法的微型飛行器三維路徑規劃[J].中南大學學報(自然科學版),2013(Suppl 2):58-62.
[24]LIN L,GOODRICH M A.Hierarchical heuristic search using a gaussian mixture model for UAV coverage planning[J].IEEE Transactions on Cybernetics,2014,44(12):2532-2544.
[25]趙文婷,彭俊毅.基于VORONOI圖的無人機航跡規劃[J].系統仿真學報,2006(Suppl 2):159-162,165.
[26]符小衛,高曉光.一種無人機路徑規劃算法研究[J].系統仿真學報,2004(1):22-23.
[27]PEI-BEI M,ZUO-E F,JUN J.Cooperative control of multi-UAV with time constraint in the threat environment[C]//2014 IEEE Chinese Guidance,Navigation and Control Conference(CGNCC),2014.
[28]董世友,龍國慶.網絡環境下的基于Agent的多架無 人機的任務規劃系統[J].彈箭與制導學報,2005 (Suppl 3):189-191.
[29]孫小雷,齊乃明,董程,等.無人機任務分配與航跡規劃協同控制方法[J].系統工程與電子技術,2015,37(12):2772-2776.
[30]王福星.基于粒子群優化算法的多無人機自組織控制[D].南京:南京郵電大學,2019.
[31]賈振.基于多區域分級式的無人機編隊控制算法研究[D].南京:南京郵電大學,2019.
[32]褚政,郭分林,粘松雷.基于多Agent無人機協同偵察任務規劃模型[J].指揮控制與仿真,2016,38(5):21-27.
[33]HU J F,FENG G.Distributed tracking control of leader-follower multi-agent systems under noisy measurement[J].Automatica,2010,46(8):1382-1387.
[34]張佳龍,閆建國,張普.基于改進人工勢場的無人機編隊避障控制研究[J].西安交通大學學報,2018,52(11):112-119.
[35]劉艷,陽周明,馮運鐸,等.基于改進人工勢能的無人機編隊與避障[J].火力與指揮控制,2018,43(12):118-122.
[36]于清媛.管制區域無人機防碰撞技術研究[D].德陽:中國民用航空飛行學院,2018.
[37]朱海鋒.基于立體視覺的無人機感知與規避研究[D].西安:西北工業大學,2016.
[38]楊磊,陳鳳翔,陳科羽,等.基于多傳感器的無人機避障方法研究及應用[J].計算機測量與控制,2019,27(1):280-283.
黃靜洋(1992—),女,碩士學歷,畢業于電子科技大學自動化工程學院,助教,主要從事新能源控制工程和空中交通管制研究。
中國民航局安全能力建設SA項目“基于GIS的航空器搜尋區域三維可視化研究”資助(編號:TM2017-232-1/3)
2095-6835(2020)06-0003-05
V249.1
A
10.15913/j.cnki.kjycx.2020.06.002
〔編輯:嚴麗琴〕
猜你喜歡
工業設計(2022年8期)2022-09-09 07:43:20
軍民兩用技術與產品(2021年10期)2021-03-16 06:05:30
北京測繪(2020年12期)2020-12-29 01:33:58
公民與法治(2020年11期)2020-07-25 02:02:06
裝備制造技術(2019年12期)2019-12-25 03:06:46
中國洗滌用品工業(2019年4期)2019-05-11 09:27:34
領導決策信息(2018年50期)2018-02-22 06:17:16
家庭影院技術(2017年9期)2017-09-26 03:41:45
商周刊(2017年5期)2017-08-22 03:35:26
中國衛生(2016年2期)2016-11-12 13:22:16