PMSM雙閉環平滑非奇異終端滑模控制
2020-04-22 06:00:44王艷敏牛子銘買永鋒葛楊
電機與控制學報 2020年3期
關鍵詞:永磁同步電機
王艷敏 牛子銘 買永鋒 葛楊
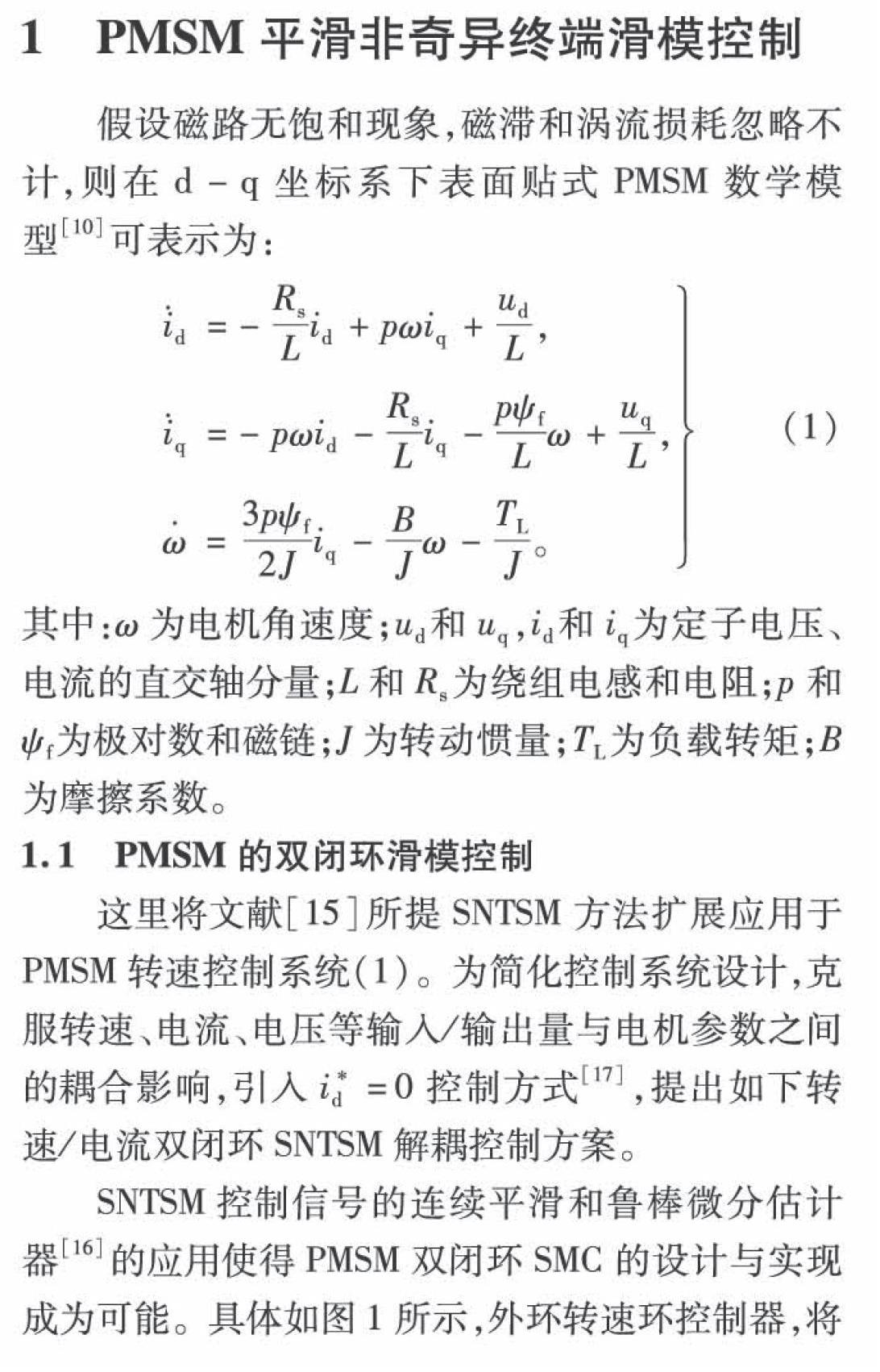
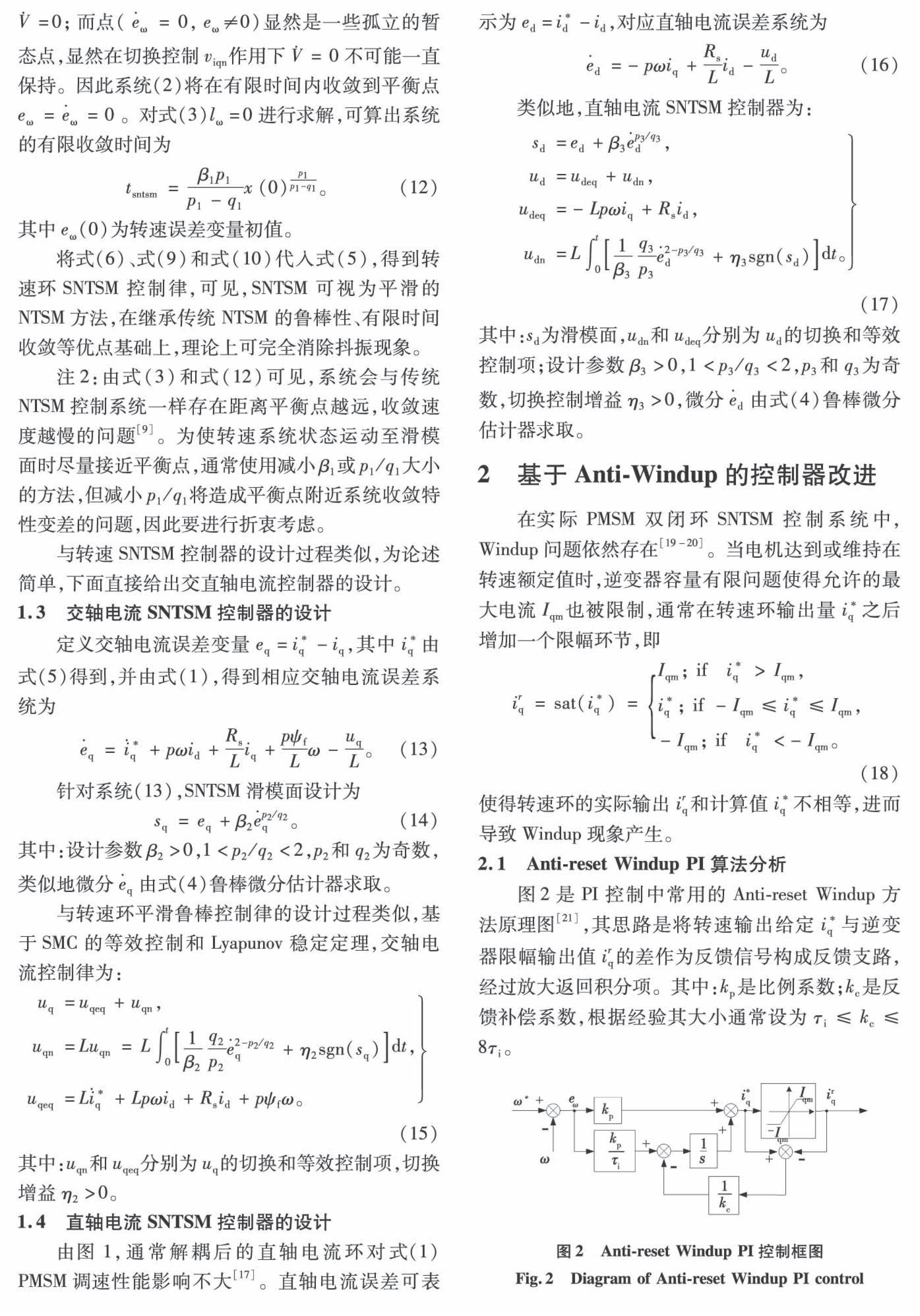
摘 要:針對傳統滑模控制中高頻切換控制特性不適用于永磁同步電機的雙閉環矢量控制的問題,針對PMSM轉速控制系統,提出一種基于魯棒微分估計器的新型平滑非奇異終端SMC方法,理論上可完全克服抖振現象對PMSM的性能影響,提高系統的動靜態特性。同時考慮到PMSM控制系統的非線性飽和特性造成的Windup現象,借鑒Antireset Windup PI控制,將轉速SNTSM控制器的輸入與輸出電流之差作為反饋信號,克服Windup現象誘發的超調量、動靜態性能變差等影響。基于李雅普諾夫穩定性理論,證明控制器的穩定性。通過仿真和實驗驗證所提控制方法的可行性和有效性,實現將SMC應用于PMSM的雙閉環控制系統中,解決了交軸最大電流限幅造成的Windup問題,響應速度、無超調量、魯棒性等性能得到優化。
關鍵詞:滑模控制;永磁同步電機;非奇異終端滑模控制;抖振;windup
DOI:10.15938/j.emc.2020.03.017
中圖分類號:TM 351文獻標志碼:A文章編號:1007-449X(2020)03-0138-09
Abstract:The traditional sliding mode control (SMC) is not suitable for the double closedloop vector control of permanent magnet synchronous motors (PMSM), due to its highfrequency switching control characteristics. For the speed control system of PMSM, a smooth double closedloop nonsingular terminal sliding mode (SNTSM) control scheme based on a robust differential estimator is proposed. It could realize the freechattering SMC, overcome the influences of chattering problem on PMSM and improve the robustness and the response speed of the system. Focused on the windup phenomenon caused by nonlinear saturation characteristics of PMSM system, the difference between the input current and output current of speed SNTSM controller was taken as a feedback signal, as Antireset Windup PI controller does, to overcome the influence such as overshoot, bad dynamic and static performances. Based on the Lyapunov theorem, the stability of controllers was proved. Simulation and experiment results proved the proposed method.
Keywords:sliding mode control; permanent magnet synchronous motor; nonsingular terminal sliding mode; chattering; windup
0 引 言
永磁同步電機(permanent magnet synchronous motors,PMSM)以其效率高、運行可靠、力能指標好、質量輕、體積小等優點,目前在汽車船舶、風機水泵、醫療器械等領域應用前景廣闊[1-2]。然而,PMSM的轉速、電流、電壓等輸入/輸出量之間存在復雜的影響關系,盡管利用矢量控制技術可實現PMSM的模型解耦,但是耦合作用不等于簡單的干擾,PMSM的內部參數攝動和負載等外部擾動,仍對系統的穩定性及各項動靜態性能指標產生嚴重影響。如何實現強魯棒性、高性能的PMSM控制策略研究仍具有重要的研究價值[3-5]。
大量文獻表明滑模控制(sliding mode control,SMC)以其實現簡單、抗干擾能力強等優點而成為一種有效控制非線性系統的手段[6-7]。目前,SMC在PMSM中的應用仍以傳統SMC為主,其中應用最為廣泛的方法包括線性滑模[6]、終端滑模[8]和非奇異終端滑模(nonsingular terminal sliding mode,NTSM)[9],例如文獻[10-11]。一方面,抖振問題[6]嚴重制約其實際應用。考慮到實際系統硬件電路的實現,理論上無限快的SMC切換控制sgn(.)只能通過有限頻率的功率器件實現,進而誘發高頻抖振現象,使得實際PMSM控制器輸出表現為光滑的理論計算值與有限頻率和幅值的鋸齒信號的疊加,從而降低系統的動靜態性能,造成電機磨損和發熱,甚至破壞其穩定性。另一方面,盡管采用諸如滯環調制、積分器/低通濾波等多種措施可以有效抑制高頻抖振信號,然而傳統的SMC在PMSM的應用多采用諸如“外環PI+內環SMC”的復合形式,難以擴展到雙閉環SMC控制。從理論上分析,外環SMC控制器的輸出sgn(.)作為輸入送到內環,即意味著內環SMC控制器設計時需要對高頻切換信號sgn(.)求導,這顯然是個難題。
同時,Windup現象也是影響PMSM系統控制性能的一個突出問題。PMSM控制系統包含復雜的非線性飽和特性,例如逆變器的限幅作用等,使得控制器參考輸入值和反饋值不相等,進而出現 Windup現象,造成超調量過大,甚至系統失穩的現象。相比于PI控制的AntiWindup方法[12],例如條件作用技術和系統綜合法,目前在PMSM滑模控制系統的研究還略顯薄弱,但Windup問題依然存在,有必要在SMC控制器設計時進行考慮。
猜你喜歡
現代電子技術(2017年1期)2017-02-16 11:49:32
汽車工程學報(2016年5期)2017-01-16 02:42:50
計算技術與自動化(2016年4期)2017-01-11 14:06:23
電子技術與軟件工程(2016年19期)2016-12-19 18:43:28
中國科技博覽(2016年15期)2016-08-23 00:59:37
電腦知識與技術(2016年13期)2016-06-29 21:41:37
科技視界(2016年12期)2016-05-25 11:07:56
電腦知識與技術(2016年2期)2016-03-22 22:21:46
電腦知識與技術(2016年1期)2016-03-22 15:49:38
哈爾濱理工大學學報(2015年6期)2016-02-18 00:26:49
