基于TMS320F28335的小型無人旋翼機數據采集系統①
2020-04-24 02:19:40強志鵬齊明思張紀平姬天田孫起帆薛洋洋
計算機系統應用 2020年4期
強志鵬,齊明思,張紀平,姬天田,孫起帆,薛洋洋
(中北大學 機械工程學院,太原 030051)
引言
近些年隨著航空技術的不斷發展,國內外學者針對無人機數據采集的研究成果層出不窮,但是對無人旋翼機的研究較為少見.小型無人旋翼機的旋翼不支持動力旋轉,所以其故障率遠低于一般無人機,相對而言經濟性和可靠性也比較高[1],因此無論是在農業植保方面,還是科研方面,都具有極其巨大的應用潛力和研究價值.由于小型無人旋翼機自身的特性,只使用一套數據采集裝置所采集的數據將會出現重大的誤差,為了滿足小型無人旋翼機對大氣數據采集系統體積小,功耗低,測量精準度高,抗干擾能力強,數據實時性強等要求[2],在分析了大氣數據采集原理以及小型無人旋翼機飛行特點的基礎上,設計出了基于MEMS 數字型差壓傳感器和F28335 芯片的一種小型雙采集裝置大氣數據采集系統,并對系統的設計進行了一定的分析和研究,使系統能夠更加契合小型無人旋翼機[3].
1 測量原理
大氣數據采集系統,是指通過傳感器采集測量飛行器周圍多種大氣參數及經過解算后輸出多種飛行器所需參數的多輸入多輸出的機載綜合測量系統[4].由于小型無人旋翼機的一些特點,現有的大氣數據采集系統在使用環境、成本、體積等方面受到了限制,針對這些特點設計的大氣數據采集系統選取了大氣靜壓以及大氣動壓兩個參數作為主要輸入參數,輸出氣壓高度值、指示空速、真實空速[5],其系統原理圖如圖1所示.

圖1 大氣數據采集系統原理框圖
1.1 氣壓高度測量的計算原理
小型無人旋翼機的飛行高度較低(小于11 km),飛行速度比較慢,一般在對流層下層進行飛行,因此利用大氣壓力與飛行器高度變化密切相關的特性來測量飛行高度是一種可行的方法.可以按照以下的計算公式對氣壓高度進行計算[6].
當0≤H≤11 km 時,大氣壓力和高度的關系可表示為:

式中,Hp代表氣壓高度,單位為m;PH代表小型無人旋翼機所在高度的大氣靜壓,單位為kPa;大氣靜壓P0=101.325 kPa(標準大氣狀態下海平面處);溫度T0=288.15 K(標準大氣下海平面處);氣溫垂直遞減率τ =-6.5×10-3K/m;標準自由落體加速度g=9.8 m/s2;空氣專用氣體常數R=287.052 87 m2/s2·K.
把查資料所得的標準大氣數據代入式(1)得:

由式(2)可以看出如果我們直接在F28335 中利用這個公式對氣壓高度值進行計算顯得比較復雜,會拖慢系統的運算速度,不利于系統數據傳輸的實時性,所以在本系統中將采用線性插值的方法對其進行處理.
1.2 指示空速和真實空速的測量原理
通過小型無人旋翼機飛行時大氣數據采集系統測量得到的動壓Pd經過式(3)解算得到指示空速.

式中,vi為指示空速,單位為km/h;Pd為動壓,單位為kPa.
在操控小型無人旋翼機時飛行的高度不同,小型無人旋翼機周圍的環境具有較大的差異,大氣數據采集系統測得的指示空速并不能完全代表小型無人旋翼機的實際速度,所以通過式(4)對指示空速進行一定的換算修正得到真實空速.

式中,vH為真實空速,單位為km/h.
由式(3)和式(4)可知指示空速和真實空速的解算公式一樣比較復雜,直接運算會占用較多的系統資源,同理,將對其采用線性插值的方法進行處理.
2 系統的硬件設計
為了滿足小型無人旋翼機大氣數據采集系統的體積小,功耗低,抗干擾能力強等要求,設計出的大氣數據采集系統的原理框圖如圖2 所示.傳感器將采集到的模擬信號經過放大電路放大調理之后進行AD 轉換,將模擬信號轉換為數字信號,傳入到DSP 的解算模塊中,求其平均值并利用線性插值算法解算出設定好的參數值,濾波之后通過串口通訊將解算得到的參數值進行輸出.
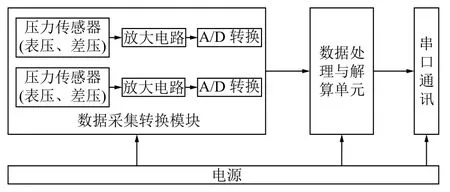
圖2 大氣數據采集系統硬件框圖
2.1 數據采集模塊
根據小型無人旋翼機的飛行需求,對小型無人旋翼機所需要參數計算原理進行析,本大氣數據采集系統需要兩個絕壓傳感器以及兩個差壓傳感器.根據大氣數據采集系統的設計和實際需求,絕壓傳感器選取了基于高度集成的MS5803 高分辨率數字式氣壓傳感器[7],該傳感器包括高線性度的壓力傳感元件和超低功耗的24 位模數轉換電路,具有體積小,價格低,功耗低(1 μA),分辨率高(10 cm)等優點,帶有SPI 和I2C 兩種接口,通訊協議較為簡單,在實際應用中可以根據情況的不同選擇不同的工作模式.MS5803 傳感器的內部結構如圖3 所示.
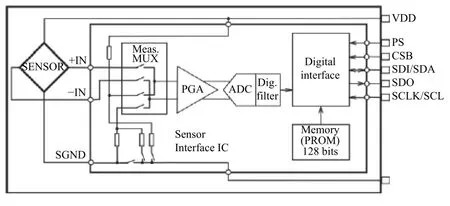
圖3 MS5803 傳感器內部結構圖
差壓傳感器采用了具有高精度,低成本,低功耗等優點的4525DO 數字式壓力傳感器[8],該傳感器內部采用了最新的CMOS 傳感器調節回路,且支持SPI 和I2C 兩種通信方式,可選側面或正面引壓,有多種貼裝方式,具有完全校準和溫度補償功能,工作電壓較小(直流恒壓3.3 V 或者5 V),其精度總誤差帶為0.25%,內部結構如圖4 所示.
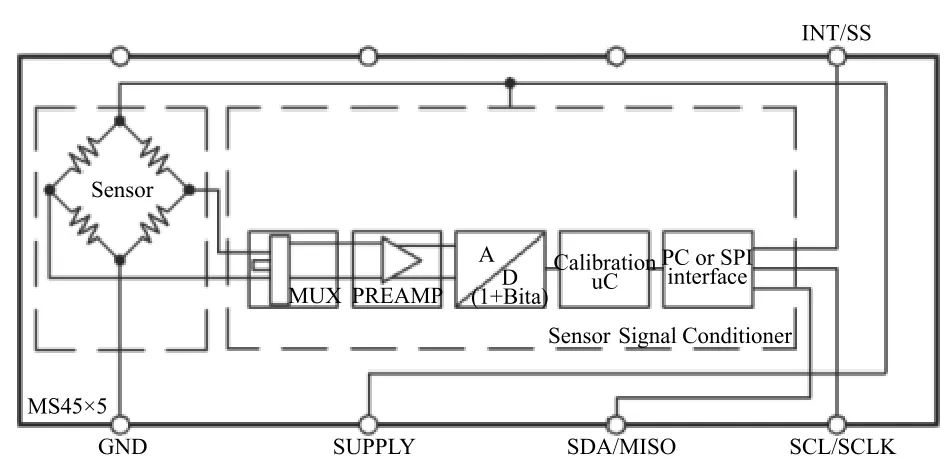
圖4 4525DO 傳感器內部結構圖
2.2 中央處理器
TMS320F28335[9]實物如圖5 所示,集成了DSP 和微控制器的長處,具有強大的數字信號處理功能,且具有豐富的外設模塊,具有精度高、功耗低等優點,價格較為低廉,適用于低成本的小型無人旋翼機.高性能的靜態CMOS 技術使得F28335 的主頻最高能達到150 MHz(6.67 ns 時鐘周期),CPU 具有IEEE-754 單精度浮點單元,能夠快速中斷響應保護關鍵的寄存器和處理外部異步事件,支持動態鎖相環比率變化,低功耗模式和省電模式能夠極大的節省系統的資源,能夠適應較為嚴苛的運行環境.
2.3 電源模塊
本系統采用AC-DC 降壓穩壓電源模塊,將220 V電源轉換為5 V(±0.2 V)為F28335 進行供電.鑒于本系統選擇的芯片是浮點型DSP,所以為了實現系統的穩定運行,需要選擇一款功率大且驅動負載能力強的非線性電源芯片,根據T I 公司的手冊選擇TPS767D301,5 V 的電壓輸入,3.3 V 和1.9 V 同時產生,3.3 V 供給IO,1.9 V 供給內核[10].

圖5 F28335 實物圖
3 系統的軟件設計
系統的軟件設計主要包含對系統的初始化,數據的采集,A/D 轉換,數據的處理以及串口通信的設計.系統的初始化包括對F28335 芯片的各個端口,時鐘,串口以及寄存器進行初始化;數據的采集是對小型無人旋翼機所在高度的氣壓進行采集轉換成模擬信號,A/D 轉換是將模擬信號轉換為數字信號;數據的處理是對采集的數據進行壓力補償、小型無人旋翼機所需參數的計算[11]和數據濾波[12-14].主程序流程圖如圖6所示.
3.1 系統的工作流程
TMS320F28335 和傳感器之間通過I2C 總線進行同步通信.當進行數據傳輸時,每個連接到I2C 總線的器件都具有唯一的識別地址且可以實現發送或接收功能.當SCL 為高電平時,SDA 信號由高電平轉為低電平,主機輸出START 信號,表示數據傳輸開始;當SCL 為高電平時,SDA 信號由低電平轉為高電平,主機輸出STOP 信號,表示數據傳輸結束.
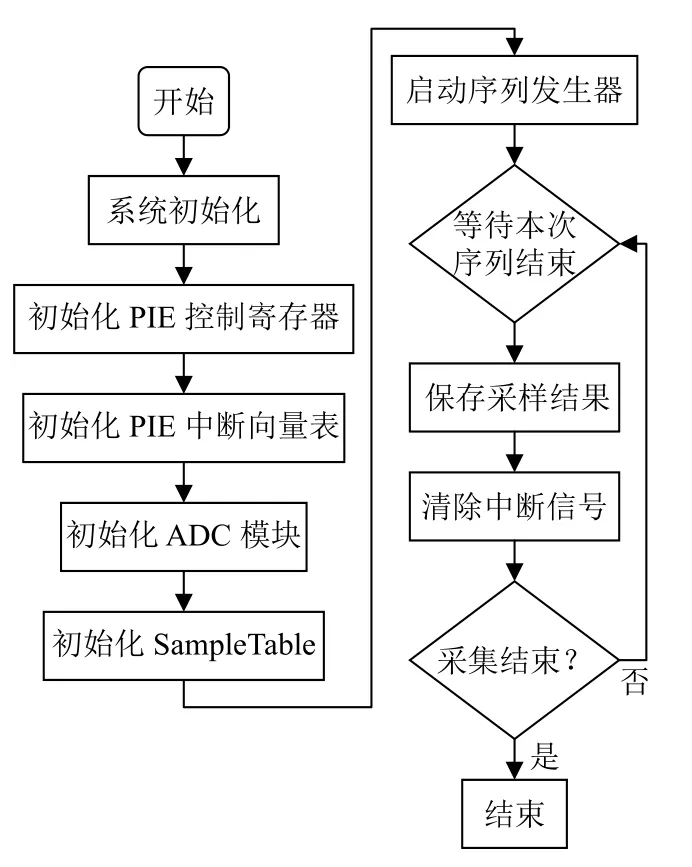
圖6 主程序流程圖
當發出START 信號I2C 模塊開始數據傳輸時,I2CMDR 中的主模式位(MST)和START 條件位(STT)必須置1.當發出STOP 信號I2C 模塊結束數據傳輸時,STOP 條件位(STP)必須置1.當I2CSTR 總線繁忙標志位(BB)和SST 位都設置為1 時,產生重復START 操作.
3.2 數據處理算法
利用軟件和硬件的緊密配合,一方面可以降低系統對硬件的要求,另一方面可以提高系統的靈活性以及穩定性.由上述的式(2)和式(3)可以看出,小型無人旋翼機所需要的參數都是利用傳感器所采集數據的單值函數,但是其函數結構比較復雜,如果直接用F28335 進行計算的話,會出現程序比較繁瑣,運算量較大等問題,不利于系統對數據的實時解算,因此為了提升系統的實時性,在系統可以接受的誤差范圍內對原函數利用線性插值算法進行處理,用一個較為簡便的函數代替原來的函數,如式(5):

式中,yi代表第i 個插值氣壓高度的值(或指示空速的值);xi代表第i 個插值點大氣靜壓的值(或動壓的值);ki代表插值線段的斜率.而插值點的個數則可以由式(6)線性插值法的誤差公式確定:

根據測量需要,在確定所需要插值點個數之后,可以得出各個插值點相對應的yi值和xi值以及插值方程線段的斜率ki,然后存放到F28335 的ROM 中,當采集轉換的兩組數據輸入DSP 時,先將采集得到的數據求平均值,然后與存儲的數據進行比較,確定其大致所在的分段,然后將該分段對應的yi、xi、ki提取出來帶入式(5)中計算,得出一組數值進行濾波后輸出,輸出的數值即為小型無人旋翼機所需要的數據.
4 實驗結果分析
由于實驗條件的限制,采用模擬實驗的方式對設計的數據采集系統進行驗證.
對某教學樓1 層到8 層各樓層的氣壓高度值進行了測量,測量綜合結果如表1 所示.

表1 各層氣壓高度值(單位:m)
從表1 中可知測量的氣壓高度值和實際高度的誤差不超過0.2 m,符合無人旋翼機的操控要求.
空速利用風扇檔數以及距離遠近的調節來進行模擬測量,同時使用GM8901+風速計測量風速作為參考數據,該風速計的技術指標如表2 所示.

表2 GM8901+風速計技術指標
空速和溫度測量得到的結果如圖7、圖8 和圖9所示.
經過多次測量,在圖7 中測量得到的空速為7.5~8.5 m/s,風速計測量的到的風速為7.1~7.3 m/s;圖8 中測量得到的空速為9.6~10.4 m/s,風速計測量的到的風速為9.3~9.6 m/s;圖9 中測量得到的溫度為25.43~25.45 ℃,溫度計測量到的溫度為27.03~27.07 ℃.可以看出測量得到的數據和實際的誤差較小,能夠滿足無人旋翼機的操控要求.
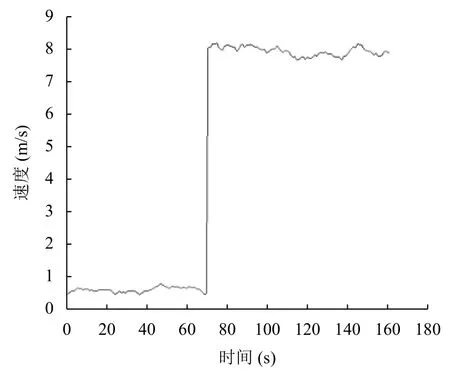
圖7 一檔模擬飛行的空速測量數值
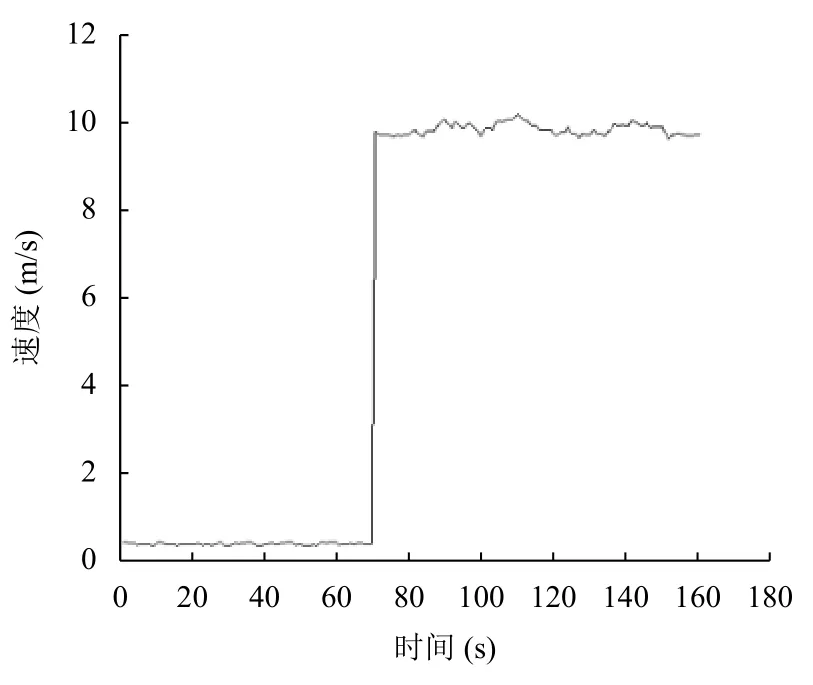
圖8 二檔模擬飛行的空速測量數值
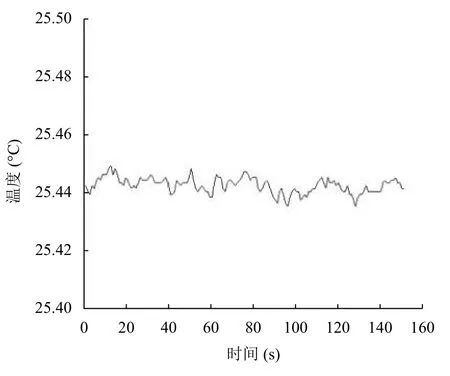
圖9 溫度測量數值
5 結語
在分析了小型無人旋翼機需求的基礎上,基于TMS320F28335 和MEMS 傳感器設計的小型雙采集裝置大氣數據采集系統測量高度誤差在0.2 m 以內,空速誤差在1.5 m/s 以內,溫度誤差在2 ℃以內,基本能夠滿足小型無人旋翼機的操控要求,并具有體積小,功耗低等優點,為小型無人旋翼機大氣數據采集系統在實際中的應用做了一定的理論工作.
猜你喜歡
軍事文摘(2023年10期)2023-06-09 09:15:06
工業設計(2022年8期)2022-09-09 07:43:20
軍民兩用技術與產品(2021年10期)2021-03-16 06:05:30
北京測繪(2020年12期)2020-12-29 01:33:58
中學生數理化·八年級物理人教版(2019年9期)2019-11-25 07:33:02
中學生數理化·八年級物理人教版(2019年3期)2019-04-25 06:20:54
中學生數理化·八年級物理人教版(2018年3期)2018-05-31 08:52:45
家庭影院技術(2017年9期)2017-09-26 03:41:45
河北書畫研究(2016年2期)2016-08-24 02:14:50
新農業(2016年18期)2016-08-16 03:28:27
