基于隱馬爾科夫模型的VLCC目的港預測
2020-04-28 22:04:47楊春王一丹徐暉胡勤友潘亞蘭
上海海事大學學報 2020年4期
楊春 王一丹 徐暉 胡勤友 潘亞蘭
摘要:超大型油船(very large crude carrier,VLCC)目的港預測對海運原油流向預測以及貨源地未來運力估計具有重要作用。針對VLCC的AIS目的港信息存在缺失、更新不及時、不準確等現象,提出一種基于隱馬爾科夫模型的VLCC目的港預測方法。分析船舶AIS軌跡數據,得到油船歷史停靠港口序列;根據VLCC軌跡提取習慣航路,以航路中的交叉點為依據設置觀測線;利用船舶航行軌跡數據判斷船舶是否經過觀測線以及經過觀測線的方向,對不同方向分別計算船舶在掛靠港間的轉移概率矩陣和船舶掛靠港與觀測線間的輸出概率矩陣,建立VLCC目的港預測模型并進行預測。研究結果表明:在大多數情況下VLCC目的港預測的準確率可以達到70%以上;航線越固定、運行越規律的船舶,預測準確率越高;船舶越靠近目的港,預測越準確;重載狀態下的船舶目的港預測更準確。
關鍵詞: 智能交通; AIS軌跡數據; 超大型油船(VLCC); 目的港預測; 隱馬爾科夫模型
Abstract: Destination port prediction of very large crude carriers (VLCCs) plays an important role in forecasting the flow of maritime crude oil and estimating the future capacity of the source. Aiming at the fact that VLCC destination port information from AIS is missing, untimely and inaccurate, a prediction method for VLCC destination ports is proposed based on the hidden Markov model. The AIS trajectory data are analyzed to obtain the historical calling port sequence. The customary route is extracted based on the VLCC trajectory, and the route observation line is set based on the route intersections. The ship trajectory data are used to determine whether the ship passes through the observation line and the direction through the observation line, the transition probability matrix of the ship between the calling ports and the output probability matrix between the ship calling port and the observation line in different directions are calculated, and a prediction model for VLCC destination ports is built to carry out the prediction. The research results show that: in most cases, the accuracy of the VLCC destination port prediction can reach more than 70%; the more fixed the ship route and the more regular the ship operation, the higher the prediction accuracy; the closer the ship is to the destination port, the more accurate the prediction is; the ship destination port prediction under heavy load is more accurate.
Key words: smart transportation; AIS trajectory data; very large crude carrier (VLCC); destination port prediction; hidden Markov model
0 引 言
據克拉克森統計,目前全球原油油船總計2 142艘,超大型油船(very large crude carrier,VLCC)總計818艘,占比達38.2%。中國是原油貿易大國,2019年經海上運輸的原油進口量超4.1億t,其中VLCC的運輸量占比82%以上。VLCC作為原油的主要運載工具,有較規律的掛靠港和航線,其船舶自動識別系統(automatic identification system, AIS)軌跡數據詳細記錄了船舶的動態和航次信息。
利用AIS數據進行海運原油流量和流向的統計和預測、船隊智慧經營的研究已經成為學術界、金融界和航運界的研究熱點。當前擁有“世界第一”規模油船船隊的中遠海運能源運輸股份有限公司正在重塑VLCC船隊發展格局,為“一帶一路”建設打造可靠的原油運輸保障團隊[1]。張春賀[2]在深入研究分析了世界石油的貿易流向后,強調全球石油(包括原油和成品油)貿易量的三分之二依賴油船進行運輸,全球石油流向很大程度上決定了油船船隊的流向。ARMITAGE[3]基于全球VLCC的AIS數據,統計2019年VLCC航行時間分布,并以此推斷當年全球各區域的原油流向情況。楊秋平等[4]通過VLCC歷史航跡數據獲取其主要航線后,基于線性規劃算法設計開發了一種航線配船和船隊規劃的決策系統,用來提高VLCC船隊總營運利潤。林貴鋒等[5]分別從全球經濟、油船運輸市場以及VLCC運力供給等角度分析了國際油船運輸市場的發展趨勢,并對我國VLCC船隊的經營發展提出建議。
準確的船舶目的港信息對上述研究具有重要的價值。一方面,只要知道了重載船舶的目的港,就可以知道其卸貨港,便于對其所載原油的流向以及抵達卸貨港的時間及早做出判斷,從而及早幫助相關機構對原油流量和流向進行統計和預測;另一方面,航運公司對市場運力供給狀況非常關注,準確及時的船舶預抵港信息將有助于航運公司對市場運力供給狀況進行評估。比如,航運公司會關注未來一段時間內抵達波斯灣富查伊拉港口所有空載VLCC的數量,將其作為波斯灣區域航運市場運力供需評估的一個依據,這就需要對全球VLCC是否能夠在這一時間段內趕到富查伊拉港口進行判斷。此時,需要掌握重載VLCC的目的港(卸貨港),用來判斷其到達卸貨港的時間、從該卸貨港到富查伊拉港口的時間以及必要的卸貨和加油時間之和是否小于特定的時間閾值。
AIS數據包含了航次信息,即船舶目的港和ETA信息。但由于人為和技術原因,目前船舶AIS目的港信息經常存在缺失、更新不及時、不規范甚至錯誤的情況,影響了實際應用效果。因此,有必要對船舶目的港進行預測,彌補現有AIS數據的不足,更好地支撐AIS數據的應用分析。
船舶目的港預測研究比陸地交通的要落后一些。陸地交通工具目的地的預測方法有很多并且正日趨完善。例如,NETO等[6]將馬爾科夫模型與部分匹配算法結合,預測用戶軌跡、下一目的地以及歷史數據中未出現過的區域。XIA 等[7]結合變量階馬爾科夫模型和用戶的時空規則提出了一種位置預測方法,這種方法對于軌跡較少的位置預測具有顯著作用。LASSOUED等[8]將車輛GPS信息映射為道路鏈接序列,并以此為輸入,利用隱馬爾科夫模型對行駛車輛的目的地和路徑進行預測。
對于海上交通而言,分析AIS數據,充分挖掘其背后的價值已成為必然趨勢。WIJAYA等[9]在HBase上存儲和處理AIS大數據集,開發了一種預測船舶運動行為的算法,在數據處理速度上有顯著提高。FUJINO等[10]利用主題模型中的線性判別算法從大量AIS數據中提取船舶航線。KANG等[11]基于VLCC時間序列數據,采用人工神經網絡(artificial neural networks, ANN)訓練算法,結合Levenberg-Marquardt和Bayesian正則化算法,對VLCC市場進行了預測。REGLI等[12]結合了AIS和船舶固定裝置,提出了一種根據AIS信息預測油船市場運價的模型。然而,目前尚無利用AIS數據進行船舶目的港預測的研究。因此,本文結合招商輪船VLCC智慧經營項目,嘗試利用AIS數據,對全球VLCC的目的港進行預測研究。
1 基于隱馬爾科夫模型的VLCC目的港預測
本文利用隱馬爾科夫模型預測VLCC目的港。隱馬爾科夫模型包含兩個隨機過程:第一個隨機過程是馬爾科夫鏈,由一個確定的狀態集以及狀態間的轉移概率矩陣確定,在隱馬爾科夫模型中,此類狀態不能被直接觀察到,故稱其為隱狀態;第二個隨機過程是隱狀態在轉移過程中產生的可觀察狀態,具體產生的可觀察狀態依賴于與特定隱狀態相關的概率分布。本文將VLCC目的港作為隱馬爾科夫模型中的隱狀態,在主航路上標記觀測線,將船舶經過的具體觀測線以及經過觀測線的方向作為隱馬爾科夫模型中的可觀察狀態。
隱馬爾科夫模型描述的是隱狀態與由其生成的可觀察狀態之間的關系,可用一個五元組λ=(S,O,P,B,π)表示[13],其中:S為船舶掛靠港集合,S={s1,s2,…,sN}, sj為船舶經過的第j個掛靠港;L為船舶航行中經過的觀測線集合,L={l1,l2,…,lM},lk為第k條觀測線;P為隱狀態轉移矩陣,即船舶在掛靠港間的轉移概率矩陣,P={pij},pij表示從港口si轉移到港口sj的概率(見圖1);B為隱狀態輸出可觀察狀態關系矩陣,即船舶掛靠港與觀測線之間的輸出概率矩陣,B={bjk},bjk=p(lk|sj),1≤j≤N,1≤k≤M,bjk表示目的港為港口sj時經過觀測線lk的概率;π表示初始掛靠港概率分布。在本文的表述中,掛靠港指船已實際掛靠過的港口,目的港指船即將前往的港口。
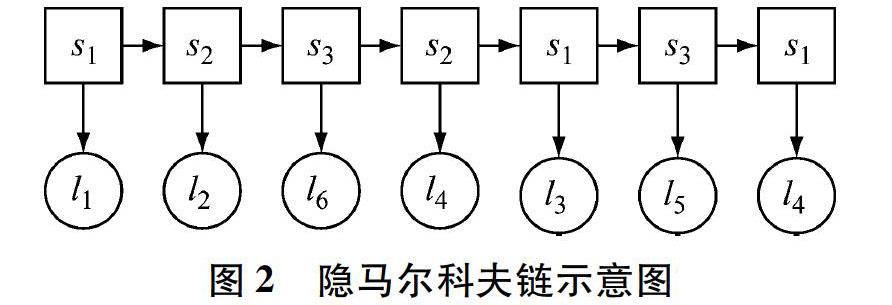
假設某船有3個掛靠港,船舶掛靠港序列為(s1,s2,s3,s2,s1,s3,s1),為隱狀態序列;航路觀測線序列為(l1,l2,l6,l4,l3,l5,l4),為可觀察狀態序列。二者對應關系見圖2,其中:橫向箭頭代表港口之間的轉移關系,即隱狀態之間的轉移關系;縱向箭頭代表港口與觀測線之間的關系,即隱狀態與可觀察狀態之間的關系。
2 模型建立
利用隱馬爾科夫模型對VLCC目的港進行預測,主要分為訓練階段和預測階段兩個部分,見圖3。在訓練階段,先對AIS數據進行處理得到建模數據,然后對VLCC的歷史AIS數據進行學習和挖掘,從中學習運動特征,構造預測模型。在預測階段,基于訓練階段得到的模型,輸入待查詢船已有的軌跡數據,進行目的港分析和預測。
2.1 船舶AIS數據處理
2.1.1 AIS數據預處理
對AIS數據進行處理,得到實驗所需的軌跡序列,步驟如下:
步驟1 將MMSI位數不為9、港口代碼或名稱有明顯錯誤的數據刪除,將經度不在180°W~180°E、緯度不在90°S~90°N范圍內的數據刪除。
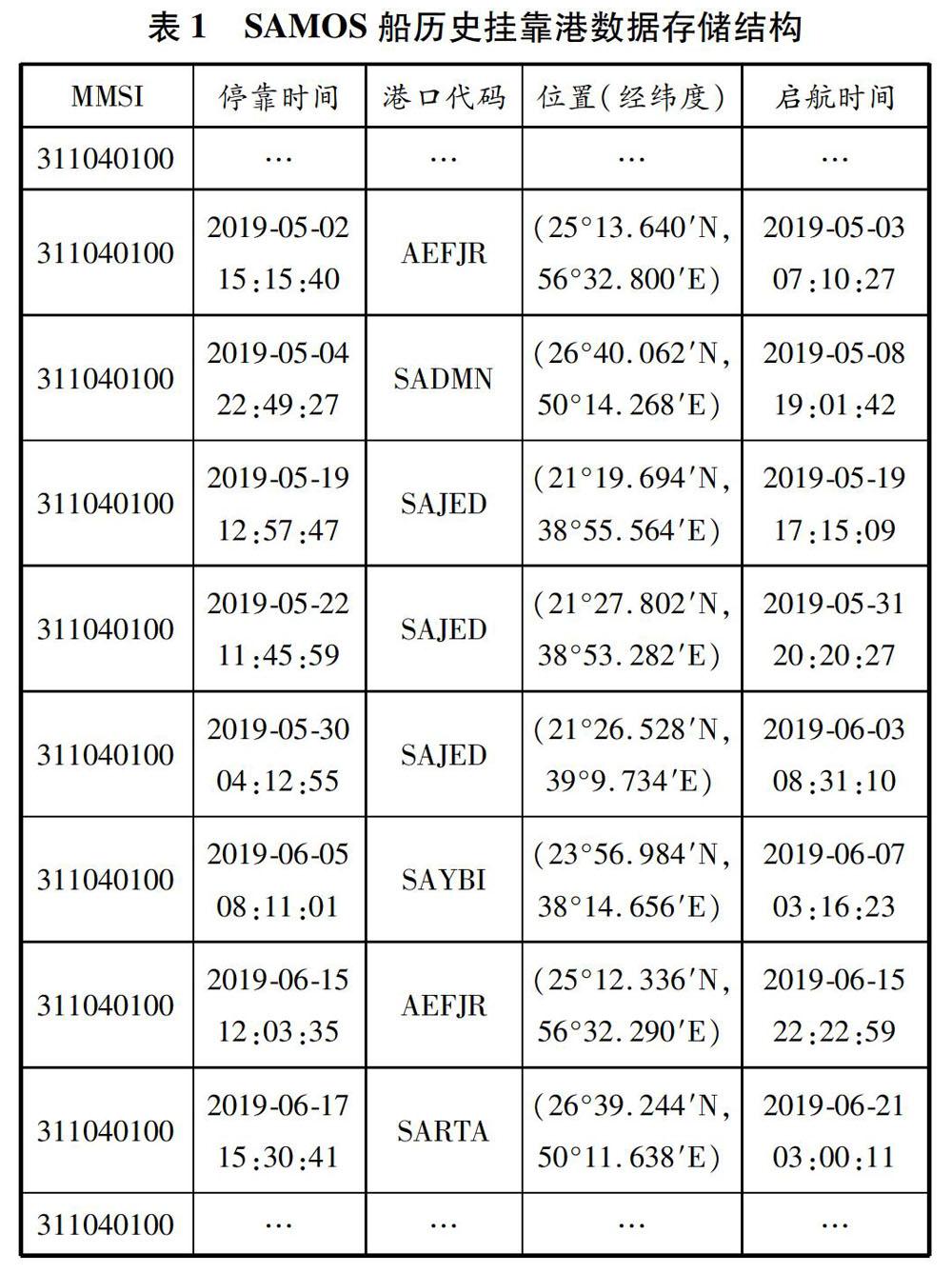
步驟2 統計VLCC歷史軌跡數據并提取VLCC歷史掛靠港數據,數據字段包含MMSI(海上移動識別碼)、portcode(港口代碼)、triggertime(停靠時間)、restarttime(啟航時間)、mpostion(所處位置經緯度)。
步驟3 統計VLCC習慣航路觀測線數據集合,數據字段包含lineID(觀測線ID)、linename(觀測線名稱)、linestring(觀測線起始點經緯度)。
步驟4 將VLCC歷史掛靠港數據進行進一步處理。比較相鄰兩條數據,若MMSI相同且掛靠港相同,說明有重復記錄,則保留當前數據,刪除下一條數據;若MMSI不同則上下兩條數據均保留。
步驟5 重復步驟4處理所有船舶歷史掛靠港數據。
SAMOS船(MMSI:311040100)歷史掛靠港數據存儲結構見表1。
2.1.2 船舶習慣航路的觀測線設置
VLCC航線的規律性使得VLCC在掛靠港之間具有較固定的路線,因此可根據AIS數據繪制船舶軌跡得到習慣航路。在航路分叉點前的主航路上畫一條與其成90°的線段作為觀測線。若整段航路無分叉點則只設置一條觀測線。以此類推,為分叉點后的航路設置觀測線,如圖4所示:S1,S2,…,S7表示船舶的習慣航路;l1,l2,…,l7表示習慣航路上的觀測線;D1,D2,D3表示船舶在該點處有不同的前行方向或者船舶從不同的方向行駛到此處。
根據VLCC習慣航路和設置的觀測線可預測船舶即將抵達的港口。在數據比較充足時,以觀測線為斜邊,根據線段兩端點經緯度確定水域,根據船舶當前經緯度判斷船舶是否位于該水域,進而判斷船舶是否經過該觀測線。然而,船舶在航行期間因衛星通信不穩定而容易產生數據丟失現象,無法及時獲取船舶當前經緯度信息。此時,可根據連續兩個時間點船舶經緯度坐標形成的線段與觀測線是否跨越來判斷船舶是否經過觀測線。
2.1.3 船舶經過觀測線的方向判斷
船舶運動與車輛、飛機等的運動相比有其獨特性:船舶在正常航行過程中不會突然停止、轉彎或倒轉,其從一種運動狀態轉換到另一種運動狀態需要更多時間和空間[14]。因此,本文基于所設置的觀測線判斷VLCC經過觀測線的方向,如圖5所示:以觀測線為基準,將觀測水域分為逆時針180°和順時針180°兩個區間,以此將船舶經過觀測線的方向劃分為d1和d2兩個方向,再通過船舶經過觀測線時的恒向線航向和該觀測線的方位角進行判斷。
2.2 預測模型建立步驟
VLCC利用AIS數據進行目的港預測,主要分為以下步驟。
步驟1 計算隱狀態轉移矩陣P。VLCC掛靠港為隱狀態,P的行和列均為掛靠港。先根據MMSI對船舶進行分組,然后根據其經過觀測線的方向再次分組,按時間升序排列得到方向不同的兩個掛靠港記錄。遍歷掛靠港數據,上下連續兩個港口表示由始發港轉移到目的港,利用式(1)得到P。
步驟2 計算隱狀態輸出可觀察狀態關系矩陣B。VLCC是否經過觀測線為可觀察狀態,B的行為觀測線,列為船舶掛靠港。根據船舶航行軌跡判斷其經過觀測線的方向,得到船舶經過的港口及觀測線,按時間升序排列。以KMTC INCHEON船(MMSI:373220000)為例,如表2所示,若方向d1、d2對應的值為1,則該船從該方向經過對應觀測線。遍歷數據中的觀測線和掛靠港集合,得到船舶從不同方向經過觀測線lk抵達目的港sj的次數yjk和概率bjk。
步驟3 預測VLCC目的港。輸入待查詢船的MMSI和已有的航跡數據。若該船尚未經過觀測線,則在矩陣P中根據MMSI查詢該船在不同方向到達各個可能港口的概率;若該船已經過觀測線,則在矩陣B中根據MMSI和該船經過觀測線的方向獲取該船到達各個可能港口的概率。
步驟4 統計概率。按照降序排列預測結果,展示預測的港口及其對應的概率值,將最大概率對應的港口作為目的港預測結果。
3 實驗分析
3.1 實驗環境和數據說明
本文的實驗數據存儲于Cassandra數據庫,同時結合MySQL關系數據庫進行數據處理,利用Spark和Java實現算法。實驗所用數據是由HiFleet船隊在線提供的2016-01-01 00:00:00—2018-12-31 24:00:00期間的載重27萬t以上油船的歷史掛靠港信息和AIS數據。
3.2 實驗結果及分析
將2019-05-01 00:00:00—2019-06-30 24:00:00期間的油船歷史軌跡數據作為測試集。
3.2.1 主要航線上VLCC目的港預測結果驗證
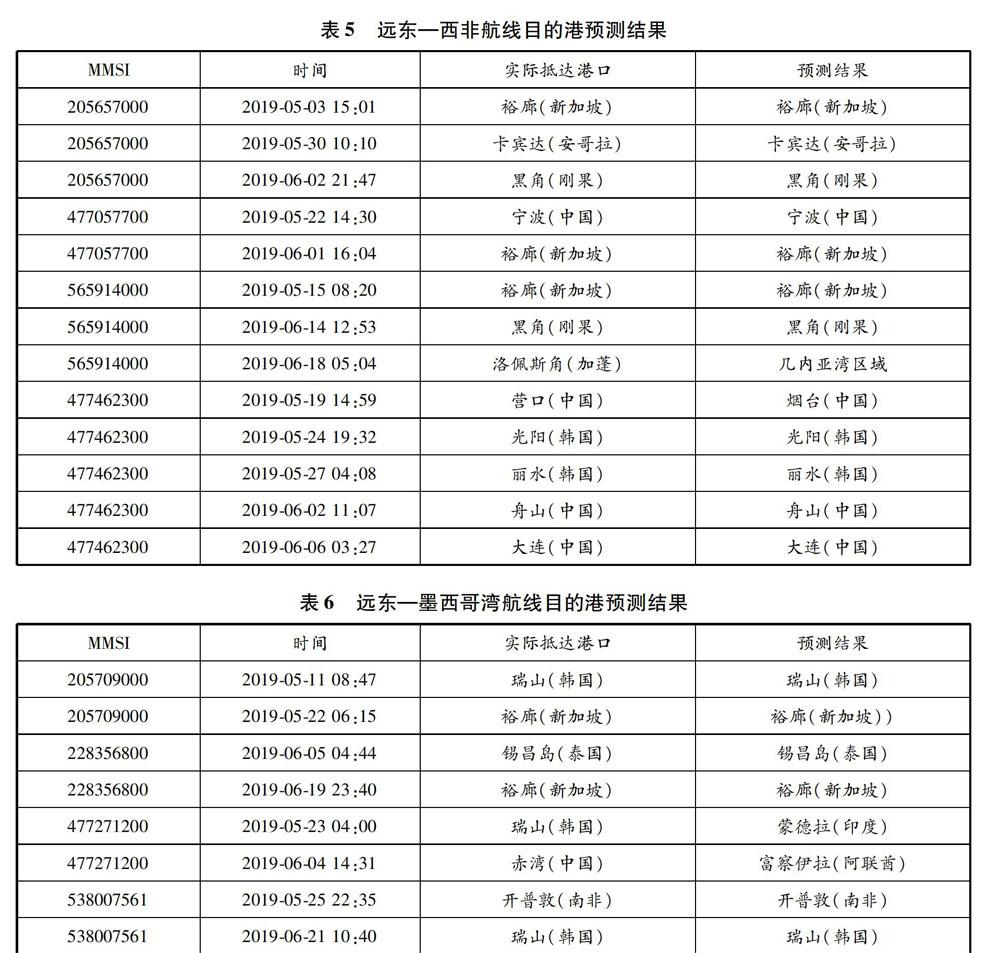
VLCC航線較固定,大部分時間在特定區域之間轉移,其中主要的原油裝貨區域有中東波斯灣、西非的安哥拉和幾內亞灣、巴西、美國墨西哥灣等,原油卸貨區域有遠東(包括中國、日本和韓國)、印度和泰國等區域。匯總主要航線上的VLCC AIS數據進行目的港預測結果驗證。VLCC目的港預測準確率對高于波斯灣到遠東、印度的VLCC目的港預測準確率,這是由于從遠東到巴西、墨西哥灣的航程較長,航線相對少且較固定,而波斯灣地區作為盛產石油地區,港口眾多且相互之間距離比較近,大量的VLCC往返均經過此區域,導致目的港預測準確率下降。某些航線目的港預測結果見表3~6。
可以看到,在部分船舶目的港預測上,出現了僅預測出港口所在區域,未預測出具體港口的現象,這是因為該船在航行過程中以新航線航行,經過了新的觀測線。因此,下一步研究是匯總所有船舶經過的觀測線數據,形成公有的隱狀態輸出可觀察狀態關系矩陣,用于預測采用新航線航行的船舶。
3.2.2 VLCC目的港預測準確率與船舶距離目的港遠近關系分析
隨機選取部分船舶,觀察其在兩個港口之間目的港預測準確率的變化趨勢,見圖7。由圖7可知,船舶距離目的港越近,經過的觀測線數量越多,模型不斷修正目的港預測結果,目的港預測準確率呈上升趨勢。
3.2.3 VLCC目的港預測準確率與船舶載貨狀態關系分析
正常情況下,VLCC往往以滿載狀態從原油裝貨區航行至原油卸貨區,以空載狀態從原油卸貨區航行至原油裝貨區。以船舶在卸貨港卸貨結束作為起始時刻,到裝貨港進行裝貨,然后再去卸貨港進行卸貨作為結束時刻的這個過程稱為船舶的一個裝卸貨航次。本文將主要航線上的船舶的裝卸貨航次分為“卸貨-裝貨”航次和“裝貨-卸貨”航次兩個部分,對處于空載和滿載狀態的VLCC分別進行目的港預測。隨機選取測試集中的100艘空載狀態和100艘滿載狀態的船舶,對其進行目的港預測,記錄預測結果,統計預測的目的港及其對應的概率,對概率集進行分位數統計,見圖8。
由圖8可以看到,每個分位數處的目的港預測概率均比較接近且保持較高水平,這證明了本文所提出的目的港預測模型的預測結果具有一定的參考價值。滿載船舶的目的港預測概率比空載船舶的高,這一結果與VLCC的航行特性相吻合,部分原因是因為船舶在滿載貨物后,往往根據運輸合同駛往指定的目的港,但是卸貨后的空載船舶往往一開始只知道目的港區域,而不知道具體的目的港。
4 結束語
本文基于VLCC的AIS歷史軌跡數據,實現了一種VLCC目的港隱馬爾科夫預測算法,并以2019年部分VLCC軌跡數據為例進行了實證研究。結果表明:本文提出的VLCC目的港預測方法準確率較高,可達70%以上;航線越固定、運行越規律的船舶,對其目的港預測的準確率越高;船舶越靠近目的港,預測結果越準確;重載船舶的目的港預測結果更準確。該算法可以用于海運原油流量和流向中短期預測,還可以用于原油貨源地運力估計,對原油進出口預測、VLCC船隊智慧經營等具有參考價值。
參考文獻:
[1]朱邁進. 打造國家能源運輸安全通道構筑能源“海上絲綢之路”[N]. 中國遠洋海運報, 2020-01-03(B02)[2020-03-17].
[2]張春賀. 全球石油貿易大流向[J]. 國土資源情報, 2006(10): 52-55.
[3]ARMITAGE E. Tracking the tanker fleet across the global playing field[EB/OL].(2019-11-29)[2020-03-17]. https://sin.clarksons.net/News/Article/146578#!#sincustomhome.
[4]楊秋平, 謝新連, 蘇晨. 航線配船與船隊規劃模型及算法實現[J]. 中國航海, 2009, 32(1): 91-95.
[5]林貴鋒, 謝新連, 肖躍軍. 國際油船運輸市場的走勢分析[J]. 大連海事大學學報(社會科學版), 2005, 4(1): 38-42. DOI: 10.3969/j.issn.1671-7031.2005.01.010.
[6]NETO F D N, DE SOUZA BAPTISTA C, CAMPELO C E C. Combining Markov model and prediction by partial matching compression technique for route and destination prediction[J]. Knowledge-Based Systems, 2018, 154: 81-92. DOI: 10.1016/j.knosys.2018.05.007.
[7]XIA Ying, GONG Yu, ZHANG Xu, et al. Location prediction based on variable-order Markov model and users spatio-temporal rule[C]//2018 International Conference on Information and Communication Technology Convergence. IEEE, 2018: 37-40. DOI: 10.1109/ICTC.2018.8539593.
[8]LASSOUED Y, MONTEIL J, GU Yingqi, et al. A hidden Markov model for route and destination prediction[C]//2017 IEEE 20th International Conference on Intelligent Transportation Systems. IEEE, 2017: 1-6. DOI: 10.1109/ITSC.2017.8317888.
[9]WIJAYA W M, NAKAMURA Y. Predicting ship behavior navigating through heavily trafficked fairways by analyzing AIS data on Apache HBase[C]//2013 1st International Symposium on Computing and Networking. IEEE, 2013: 220-226. DOI: 10.1109/CANDAR.2013.39.
[10]FUJINO I, CLARAMUNT C, BOUDRAA A. Extracting route patterns of vessels from AIS data by using topic model[C]//2017 IEEE International Conference on Big Data. IEEE, 2017: 4744-4746. DOI: 10.1109/BigData.2017.8258528.
[11]KANG S, DOH D. Forecasting earning of VLCC tankers using artificial neural networks[J]. Journal of the Korean Society of Marine Engineering, 2018, 42(10): 851-858. DOI: 10.5916/jkosme.2018.42.10.851.
[12]REGLI F, NOMIKOS N K. The eye in the sky-freight rate effects of tanker supply[J]. Transportation Research Part E: Logistics and Transportation Review, 2019, 125: 402-424. DOI: 10.1016/j.tre.2019.03.015.
[13]QIAO Shaojie, SHEN Dayong, WANG Xiaoteng, et al. A self-adaptive parameter selection trajectory prediction approach via hidden Markov models[J]. IEEE Transactions on Intelligent Transportation Systems, 2015: 284-296. DOI: 10.1109/TITS.2014.2331758.
[14]TU Enmei, ZHANG Guanghao, RACHMAWATI L, et al. Exploiting AIS data for intelligent maritime navigation: a comprehensive survey from data to methodology[J]. IEEE Transactions on Intelligent Transportation Systems, 2018, 19(5): 1559-1582. DOI: 10.1109/TITS.2017.2724551.
(編輯 趙勉)
