智能船舶背景下《1972年國際海上避碰規則》的修正
2020-04-28 22:57:29呂紅光裴天琪尹勇白宇明
上海海事大學學報 2020年4期
呂紅光 裴天琪 尹勇 白宇明
摘要:鑒于智能船舶的快速發展使得對《1972年國際海上避碰規則》的修正尤為迫切,根據智能船舶的含義和自主分級,從船舶避碰實踐視角分析智能船舶與規則之間一些不可避免的沖突,如在智能船舶的適用性、任何能見度下和互見中的行動規則等方面存在的沖突。提出在船舶不同自主級別下對公約修正的認識和建議,以期促進船舶航行安全,為國際海事組織及相關立法機構梳理和修正法規提供參考。
關鍵詞: 智能船舶; 海上水面自主船; 國際海上避碰規則; 公約修正
Abstract: In view of the fact that the rapid development of intelligent ships makes the amendments to the International Regulations for Preventing Collisions at Sea, 1972 especially urgent, according to the definition and autonomy classification of intelligent ships, some inevitable conflicts between intelligent ships and the regulations are analyzed from the perspective of ship collision avoidance practice. These conflicts exist in such aspects as the applicability of intelligent ships, the rules of action in any condition of visibility and in sight of one another. Some understandings and suggestions on the convention amendments for the different autonomy levels of ships are proposed. The aim is to promote the safety of ship navigation, and provide reference for the International Maritime Organization and relevant legislative bodies to sort out and amend the regulations.
Key words: intelligent ship; maritime autonomous surface ship; international regulations for preventing collisions at sea; convention amendment
0 引 言
隨著信息化、物聯網、人工智能等高新技術的發展,智能船舶的研究愈加深入。2017年6月,在國際海事組織(IMO)海事安全委員會(MSC)第98屆會議(MSC98)上設立關于海上水面自主船(MASS)的新工作計劃。之后MSC各屆會議專門有針對MASS的議程,并在2019年6月MSC101上發布《MASS試航臨時指南》。MASS已成為國際海事領域研究的熱點,在國內則多以智能船舶或無人船的名稱出現。
2018年12月27日,工業和信息化部、交通運輸部、國防科工局聯合印發《智能船舶發展行動計劃(2019—2021年)》,其中重點任務的第一條就強調“開展智能船舶相關法律法規梳理,提出需求框架”。現行《1972年國際海上避碰規則》(以下簡稱《規則》)是智能船舶繞不開的國際規則。鑒于智能船舶與傳統船舶在法律主體地位和技術層面存在較大差異,開展《規則》對其的適用性研究非常重要。文獻[1]從智能船舶、安全文化、強制審核機制等方面提出了修正《規則》的迫切性和相關宏觀建議。文獻[2-3]則主要對《規則》本身在立法和行動規則等方面存在的問題進行研究,并指出:先進的助航手段及其發展,不僅使得基于人的“互見”失去現實意義,也使得《規則》難以適用于無人船,而能見度不良時的行動規則卻可以適用。李璞[4]也針對行動規則分析了《規則》的可適性和不適性。王國華等[5]主要從法律層面研究了無人船避碰責任問題,認為無人船適用《規則》存有障礙,建議在《規則》所規定的責任等級下賦予無人船靈活的法律地位,并賦予岸基操控人員船長的法律地位。
外文文獻方面:2017年丹麥海事局[6]較全面地分析了自主船適用現行國際公約(包括《規則》)所存在的障礙,并提出修正建議。PRITCHETT[7]通過對多個法規的分析說明,雖然當前無人船遵守《規則》存在困難,但為了航行安全無人船必須有規則可遵守。CAREY[8]提出《規則》應與技術保持同步,如在其中添加專門適用于無人船的附件,或視無人船為操縱能力受到限制的船舶,抑或制定一套適用于無人船的瞭望條款等。VOJKOVIC'等[9]指出在無人船無船員或船長的情況下《規則》中要求的不免除責任的船員尤其是船長該如何認定的問題。VEAL等[10]主要關注無人船的法律地位和無人船操作,分析了《規則》中避碰責任和瞭望條款的適用性,并提到了船舶大小、船舶自主級別甚至工作場景的影響。CHANG等[11]主要研究無人船的法律地位,指出《規則》中瞭望條款和行動規則在適用于無人船方面存在的障礙,認為遠程遙控的無人船可能更好適用《規則》。ZHOU等[12]在調研航海科研人員和船舶駕駛員的基礎上,從智能船舶航海實踐的角度建議進一步解釋和修正《規則》,以消除其中的不確定性;建議允許單獨依靠“計算機視覺”構成互見,并保持能見度不良和互見中航行船舶的區別。
綜上,目前文獻在研究《規則》修正必要性的基礎上,更多關注無人船的法律地位以及一些與人有關的條款(如瞭望、互見及相關行動規則等),基于法律的視角較為突出。然而,《規則》作為指導船舶海上避碰操縱的規范,是以保障船舶航行安全為宗旨的[3],具有技術和法律雙重屬性[5]。因此,本文從航海避碰實踐、新技術的應用以及法規層面較全面梳理適用于智能船舶的《規則》修正,并提出相關建議。鑒于IMO計劃于2020年完成《規則》修正的梳理工作,因此該項研究尤為迫切。
1 智能船舶概述
1.1 智能船舶概念
中國船級社(CCS)《智能船舶規范》指出,智能船舶是通過傳感器、通信、互聯網等技術手段,自動感知并獲取船舶周圍環境的信息和數據,并基于計算機科學、自動控制和大數據分析和處理等技術實現智能航行的船舶。這里的“智能”可以理解為會思考,能夠全面考慮自身所處環境,并且制定出一系列的最優決策[13]。IMO以MASS立法范圍界定為目的,在MSC99會議上提出MASS是在不同程度上能夠獨立于人類參與而運行的船舶。筆者認為“智能船舶”是一個泛化或通俗的概念,與MASS、無人船是相通的。MASS強調的是自主航行能力,其實船舶只有先具備智能,實現自主,最后才能成為真正意義上的無人船。
1.2 智能船舶的自主程度分級
智能船舶是未來船舶發展的趨勢,IMO、船級社和一些公司在這方面看法較為一致,但是他們對MASS的自主程度、發展分級等方面的看法不盡相同,如勞氏船級社將智能船舶分為AL1~AL6共6個等級,法國船級社將智能船舶分為Level 0~Level 4共4個等級,羅爾斯·羅伊斯公司將智能船舶分為遙控有人船、近海遙控無人船、遠洋遙控無人船、遠洋自主無人船4類。IMO在MSC99會議上,就自主化水平初步將MASS分為4個級別,本文中以L1~L4代替,見表1。其中,L2和L3級別的MASS均屬于遠程控制的智能船舶,需在岸基中心的支持下完成船舶的自主航行。L4級別的MASS是全自主化的無人駕駛船舶,此為智能船舶發展的終極目標。
目前,L1級別的MASS已經實現,L2~L4級別的MASS仍處于研制階段,其中L2級別的MASS已有一些實船測試案例。
2 智能船舶適用性問題
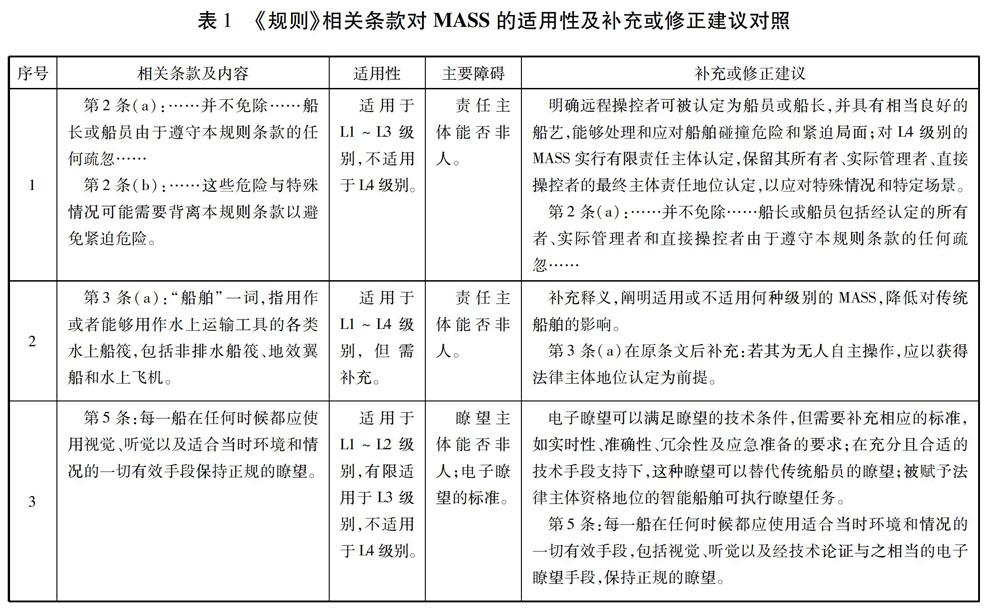
智能船舶符合相關國際公約、國內法對船舶的定義[4]。《規則》中“船舶”是指“用作或者能夠用作水上運輸工具的各類水上船筏,包括非排水船筏、地效翼船和水上飛機”[14]。可見,《規則》的適用對象不能排除智能船舶,但也未明確“智能船舶”的適用性。這與《規則》制定的時代以及當時船舶的技術條件有關。隨著技術的發展,智能船舶出現,智能船舶之間及其與普通船舶之間的避碰問題成為對《規則》修正的一大挑戰。建議在《規則》中通過具體條款對智能船舶作出解釋,并進一步明確哪些條款適用于何種級別的智能船舶,哪些條款適用于傳統船舶,哪些條款適用于所有船舶;更新《規則》時還應考慮對傳統船舶的影響最小。這樣可以避免對現有船員的大規模重新適任培訓,因為智能船舶也應采取人類能夠理解的避碰行動[15]。關于《規則》條文對智能船舶的適用性及相應補充修正建議,以下全部整理至附錄中。
2.1 遠程控制且具有決策支持功能的船舶
目前一些具有決策支持功能的船舶屬于L1級別的MASS,它們可以適用《規則》。
L2級別的MASS可能存在遠程操控人員和在船操控船員兩種類型的操控人員,他們各自的職責權限決定了避碰行動的主體責任。就現行《規則》而言,雖然未對船員所在的位置作明確規定,但鑒于《規則》制定時的技術條件,一般只適用于在船船員進行避碰決策和采取避碰行動,因此有必要在《規則》中明確遠程操控者的法律地位。
L3級別的MASS與傳統船舶在主體責任方面的區別則完全在于操控者的變化,具體體現在遠程操控人員的法律地位和《規則》執行地點的不同。遠程操控人員不在船上,其操控行為可能發生在某一國的陸地,而被其操控的船舶則可能處于其他國家的海域或港口。因此,建議遠程操控人員的法律地位和責任主從其所操控船舶,次從其所處場所,因為《規則》的主體為船舶。同時,建議遠程操控人員的法律地位同船長(或船員)且要求其具有與船長(或船員)相當的良好船藝,能夠正確處理和應對船舶碰撞危險和緊迫局面[5,8]。另外,在《規則》第2條(a)中提到“本規則條款并不免除任何船舶或其所有人、船長或船員由于遵守本規則條款的任何疏忽,或者按海員通常做法或當時特殊情況所要求的任何戒備上的疏忽而產生的各種后果的責任”,明確了不可免除責任的主體。而基于上述分析,建議將這一條款中的責任落實到智能船舶的具體操控者身上,而不是局限于傳統意義的船長和船員。
2.2 無人自主船舶
L4級別的MASS即無人自主船舶的適用性主要體現在“智能機器”能否獲得法律主體地位及其應負的相應責任問題。最大問題是無人化不能滿足船舶最低安全配員要求,不存在目前法律可以承認的責任主體,比如船長[9]。另外,即使采用目前所知最先進的智能控制算法,也不能達到《規則》第2條(b)所要求的在危險和特殊情況下背離規則的要求,因為這是一個高度復雜的認知過程[10]。如此看來,無人自主船舶不適用《規則》第2條(b)的責任條款。但是,根據國際海事委員會(CMI)2018年的調研,其包括中國在內的成員國中絕大多數國家認可一艘自主控制、無船長和船員、無人員監管的500總噸貨運裝置屬于船舶[16-17],因為這些國家的國內法也未將滿足最低配員的要求作為構成船舶的必備條件。因此,《規則》對無人自主船舶的適用性問題關鍵在于責任主體而非對船舶形式的認定。同時還應注意,對于L4級別的MASS,即使其能夠被認定為責任主體,也應該是不完全的、局部的或分場景的責任主體,在受限水域、港口水域、緊急情況下還應保留其所有者、實際管理者、直接操控者的最終主體責任地位認定。因為無人船受控于人,服務于人,也應歸屬于人,明確某些決策只能由人去實施也是倫理方面的需求。
3 智能船舶在任何能見度下的行動規則問題
3.1 瞭望
保持正規瞭望是船舶安全航行的前提條件,《規則》第5條要求“每一船在任何時候都應使用視覺、聽覺以及適合當時環境和情況的一切有效手段保持正規的瞭望”[14]。對該條款的理解如下:(1)暗含瞭望主體,如“聽覺”和“視覺”本身擁有人的自然屬性;(2)泛化瞭望形式,指一切有效手段;(3)未限制瞭望地點[5],即并非一定是在船舶上。因此,在新技術條件下,瞭望條款能在一定程度上進行擴展。對傳統船舶而言,除了“聽覺”和“視覺”,船員主要靠望遠鏡、雷達、電子海圖等助航工具輔助瞭望,以便對局面和碰撞危險作出判斷。如果智能船舶擁有先進的助航儀器,使用電子瞭望可以達到更好的瞭望效果,那么將其作為有效的瞭望手段未嘗不可[4,11],瞭望的目的是為了收集船舶周圍的信息,并據此進行評估和決策。電子瞭望不牽涉疲勞、注意力分散等問題。很多實踐已經證明,通過布置各級電子傳感設備,不僅可以感知到遠距離物標,還能夠探測到近距離的風險,對他船的航向變化也可精確覺察[7]。可見,電子瞭望可以滿足瞭望的技術條件,但需要補充相應的標準,如實時性、準確性、冗余性及應急準備的要求[6]。因此,智能船舶是否適用瞭望條款的問題不在技術層面,而在于瞭望的職責能否全部或部分轉移到智能設備以及遠程操控者身上,建議這種主體資格在《規則》修正中予以明確。
筆者認為:L1和L2級別的MASS因為船上有操控人員,可滿足現有《規則》瞭望的要求;L3級別的MASS可以依靠智能設備搜集、分析和處理信息,并由遠程操控人員完成瞭望,這種瞭望的主體依然是人,在充分且合適的技術手段支持下這種瞭望可以替代傳統船員的瞭望,但需要確保遠程操控人員切實具備正規瞭望的能力且能夠持續履行瞭望職責;當智能船舶發展到L4自主級別時,人工智能將替代傳統船員和遠程操控者進行瞭望,此時,在滿足電子瞭望技術手段基礎上,還應在《規則》中明確能否賦予智能船舶執行瞭望任務的法律主體資格(這是人工智能技術應用于智能船舶不可回避的問題,如果智能船舶不具備瞭望的主體資格,那么避碰行動無法自主完成)。
3.2 安全航速
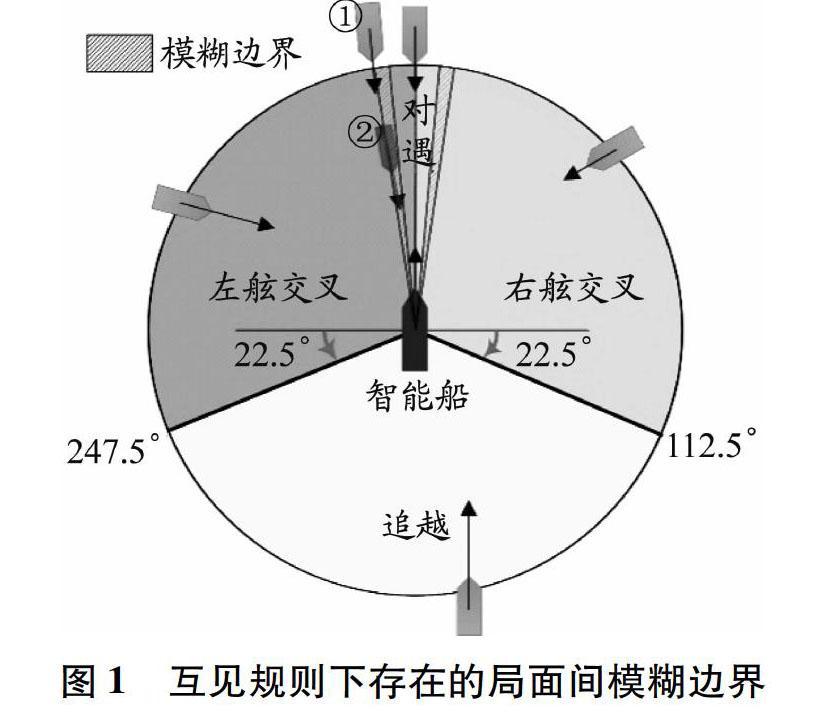
《規則》第6條要求“每一船在任何時候都應以安全航速行駛,以便能采取適當而有效的避碰行動”[14]。智能船舶在航行過程中也必須保持安全航速,但是在決定安全航速時需要考慮的因素與傳統船舶會有較大的不同。傳統船舶決定安全航速時應考慮能見度情況、交通密度、船舶的操縱性能、夜間出現的背景亮光、風浪流狀況以及吃水與可用水深關系等六大因素以及雷達的探測能力,而智能船舶除此之外還要依賴智能感知、通信和決策設備的有效運行以及岸基人員的遠程操控。此條款沒有考慮到智能船舶及其安裝設備的特殊性。建議在《規則》修正中智能船舶的安全航速確定應考慮智能感知、通信和決策設備的效能和可靠性。
3.3 良好的船藝
《規則》第8條第1款要求:“為避免碰撞所采取的任何行動必須遵循本章各條規定,若當時環境許可,應是積極地、及早地進行和充分注意運用良好的船藝。”該條第2款又提到避免碰撞的行動“應大得足以使他船用視覺或雷達觀察時容易察覺到”[14]。這些條款中提到的“積極地”“及早地”“應大得足以使他船用視覺或雷達觀察時容易察覺到”,在傳統船舶的實際應用中都得依賴船員良好的船藝。筆者認為在智能船舶逐漸趨于無人時,此條款應該對這些模糊要求作出明確規定,最好能做相應的量化處理,以使智能船舶能夠依照執行[18]。由于遠程操控人員與船員在空間位置和配員數量方面存在差異,良好的船藝標準需要進行相應的更新[5],比如在技術和人員配備兩個層面,論證能否達到與駕駛臺操控形式同樣的感知決策和應急處理能力,以此判斷是否運用良好的船藝。同時,對無人的智能船舶而言,應通過大數據、人工智能等技術將良好的船藝所代表的完備信息植入無人船舶的航行系統內,使其不僅滿足《規則》要求,而且具備與有人船舶同樣的對于良好船藝的理解,能夠處理海上復雜的會遇局面。
4 智能船舶在互見中的行動規則問題
4.1 互見
互見是《規則》中確定船舶間會遇局面和避碰責任的前提條件,其釋義關系重大。《規則》第3條(k)將互見定義為“只有當一船能自他船以視覺看到時,才應認為兩船是在互見中”。由此可知互見是基于人類視覺看見他船,而非依靠助航儀器如雷達、自動識別系統(AIS)等發現他船,因此無法適用于L4級別的MASS。另外,能否依靠視覺看到,與人眼和船舶號燈的可見距離有關。文獻[19]進一步解釋:互見是指某船能夠從其他船看到,而不是某船已經被其他船實際看到,且“一船能自他船以視覺看到”要求其他船只應在此船的號燈可見距離之內。這就造成至少兩個問題:
(1)L4級別的MASS無法與他船形成互見,繼而無法適用《規則》關于船舶在互見中的行動規則。因為只有在互見中兩船才有“直航船”與“讓路船”之分,如果無法互見,那么智能船舶沒有所謂的“讓路船”責任。這顯然不合理,也不利于航行安全。
(2)即使能夠形成互見,由于《規則》中涉及白天與夜間的區別、大船與小船的區別、船舶種類的區別等,互見的適用時機也具有不確定性。這將影響船舶所處局面和避讓決策的判斷,進而影響避碰行動的有效性,也會增加智能船舶的風險。
針對第一個問題,L4級別的MASS可利用傳感器、通信、物聯網、互聯網等技術手段,自動感知和獲得船舶自身、海洋環境等方面的信息和數據,并進行大數據處理和分析[20],其探測能力將得到極大提高,能在更遠的距離上獲得比視覺瞭望更詳細、更準確的他船信息,以協助或直接完成互見的判斷。因此,建議將構成互見的手段進行拓展,除傳統手段外還包括其他與視覺相當甚至更加充分的信息獲取手段[4]。諸如AIS、雷達、紅外及可見光攝像設備的使用,甚至先進的通信、物聯網等手段,使得智能船舶不僅可以判斷船舶的種類,還可使互見的時機更加明確,不受號燈能見距離等的影響,更有利于航行安全。如此,《規則》中的互見才可適用于智能船舶。
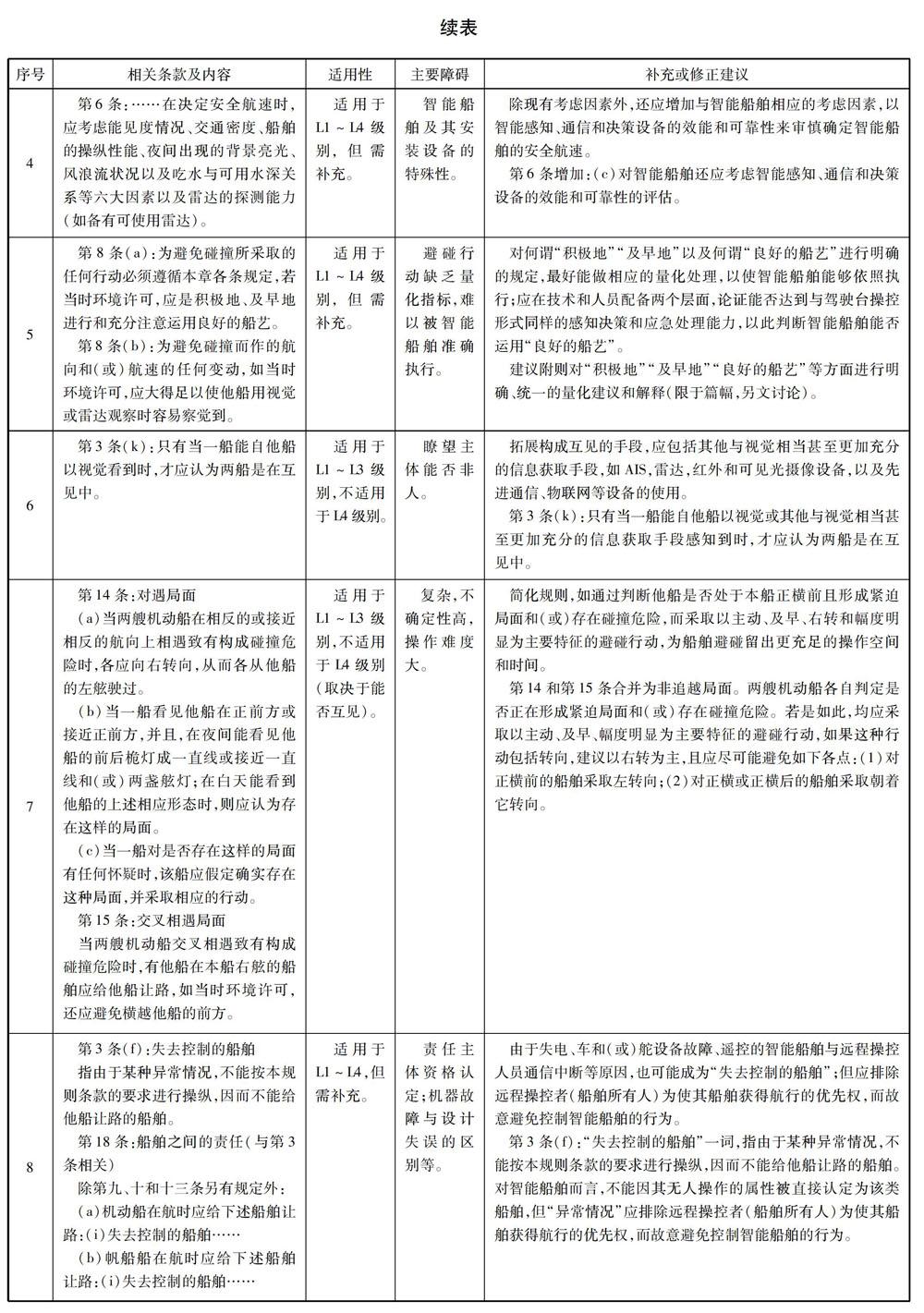
針對第二個問題,在適用互見條款之后,原條款主要用來區分兩船之間的避讓責任,對避碰行動本身缺乏明確的指導,且需區分船舶種類、大小及所處的各種局面,不確定性高,操作難度大[3]。而智能船舶投入使用需要確定性的決策并具有可解釋性。互見中有些局面存在避碰義務不清晰的問題[21],比如,在對遇局面的形成條件中“航向相反或接近相反”是一個比較模糊的概念。另外,考慮到舷燈光弧判斷條件,以及受風浪、操舵不穩等的影響,很多文獻或自主避碰系統對該局面理解為兩船船首向夾角5°~6°或半個羅經點[18,22-23]。因此,避碰實踐中會出現如圖1所示的模糊界限。智能船舶在認定同一態勢下的他船時,可能出現“對遇”或“小角度交叉相遇”兩種不同的結果,而這又會影響其采取避碰行動。《規則》雖規定“當對是否構成對遇局面有任何懷疑時應假定存在對遇局面”,但“懷疑”屬于不確定的判斷。如圖1中智能船與他船①實際形成小角度左舷交叉相遇,但因“不確定”而采取對遇規則下的行動,則可能會導致直航船過早地獨自采取行動,這也將違背《規則》[24]。另外,當出現如圖1的智能船與他船②之間距離較近的局面時,即使他船的位移很小,也可導致其舷角發生較大變化,從而改變其所處的局面。這樣,智能船舶可能會遭遇兩個相矛盾的決策突然切換的問題。比如,原來的交叉相遇局面突然變為對遇局面,智能船舶決策需由直航變為右轉避讓。而受船舶慣性、操縱性影響,智能船舶難以及時操作完成或直接造成決策的不確定性,導致發生危險[25]。針對智能船舶,建議《規則》修訂中降低互見中避讓的復雜度,用簡單的規則,如通過判斷他船是否處于本船正橫前且形成緊迫局面或存在碰撞危險,而采取以主動、及早、右轉、幅度明顯為主要特征的避碰行動,為船舶避碰留出更充足的操作空間和時間,而不是浪費更多的時間和空間來判斷其處于什么局面。
4.2 失去控制的船舶
《規則》定義“失去控制的船舶”為因某種異常情況,不能按本規則條款的要求進行操縱,因而不能給他船讓路的船舶[14]。這里的異常情況一般指超出船舶正常操作模式的情況,如主機、舵機故障或損壞等。不能將智能船舶的無人駕駛屬性列入異常情況[8],因而,智能船舶不能被認定為失去控制的船舶,這一點得到了英國、法國、日本、新加坡等國家的認可[17,26]。
然而,智能船舶由于失電、車和(或)舵設備故障、遙控的智能船舶與遠程操控人員通信中斷等原因,也可能成為“失去控制的船舶”,此時應具有《規則》所規定的航行優先權。值得注意的是,認定智能船舶為“失去控制的船舶”時,還應排除遠程操控者(船舶所有人)為使其船舶獲得航行的優先權,而故意避免控制智能船舶的行為。
由于L4級別的MASS的感知、決策和控制系統由一系列算法構成,機器在某些情況下可能發生故障,所以L4級別的MASS存在一定概率作出一些人類無法理解的決策(如不按《規則》進行操縱,不給他船讓路等)。這種情況下智能船舶能否被認定為“失去控制的船舶”有待商榷,因為這涉及智能船舶的法律主體資格認定、機器故障與設計失誤的區別等問題。如果被認定是機器故障的原因,則智能船舶屬于目前《規則》中“失去控制的船舶”,否則對“失去控制的船舶”的定義需添加更多的限制條件。
5 結束語
智能船舶的自主級別不同,對《規則》的適用性不同。由于存在船舶主體責任問題,在真正的無人自主船到來之前,《規則》仍然具有較強的適用性。相沖突之處主要表現在瞭望、安全航速、良好的船藝、互見、失去控制的船舶認定等方面。保守而言,瞭望條款可以擴展,建議《規則》不限定瞭望主體,而以瞭望的量化效果標準確定船舶是否保持了正規瞭望。安全航速的確定還應考慮智能感知、通信和決策設備的效能和可靠性。良好的船藝應從技術和人員兩個層面做相應量化。在行動規則方面,建議考慮感知、通信等技術的進步,拓展構成互見的手段,并將互見中的行動規則盡可能簡單化,降低不確定性;智能船舶不能因其無人駕駛屬性而被列入失控船,但其有成為失控船的可能。與其他已有文獻相比,本文以智能船舶為切入點,從船舶避碰實踐視角對《規則》進行了更全面的梳理,有針對性地指出了智能船舶與《規則》不可避免的沖突。限于論文篇幅和作者水平,一些關鍵條款的論述和建議仍需在以后的研究中進一步深入和完善。可以預見,未來智能船舶的發展對《規則》的沖擊將遠超本文論及范圍,因為其本質是對船舶安全航行及航運可持續發展的需求。另外,《規則》修正還應具有前瞻性和導向性,以《規則》的更新引導不斷發展的智能船舶技術,將更有利于技術本身的完善和安全目標的達成。最后,《規則》的修正是牽一發而動全身的系統工程,在IMO的“強制審核機制”和“安全文化”[2]的推動下,這項工程的重要性和戰略地位更加突出。在積極研發智能船舶的同時,將這項工作推動得越積極、越扎實、越全面,對航運業的安全和健康發展越有利。
參考文獻:
[1]張鐸, 張仁平. 引領國際海上避碰規則全面審議[J]. 世界海運, 2017, 40(2): 1-5.DOI: 10.16176/j.cnki.21-1284.2017.02.001.
[2]張鐸. 修正國際海上避碰規則的急迫需要[J]. 世界海運, 2016, 39(5): 15-18. DOI: 10.16176/j.cnki.21-1284.2016.05.003.
[3]張鐸. 避碰規則的宗旨、立法模式及其行動規則的選擇[J]. 世界海運, 2019, 42(6): 12-15.DOI: 10.16176/j.cnki.21-1284.2019.06.002.
[4]李璞. 無人智能船航行安全法律問題研究: 以船舶避碰為視角[D]. 大連: 大連海事大學, 2018.
[5]王國華, 孫譽清. 無人船碰撞相關的責任[J]. 上海海事大學學報, 2019, 40(2): 120-126.DOI: 10.13340/j.jsmu.2019.02.021.
[6]Danish Maritime Authority. Analysis of regulatory barriers to the use of autonomous ships final report[R/OL].(2017-12-01)[2020-02-20].https://www.dma.dk/Documents/Publikationer/Analysis%20of%20Regulatory%20Barriers%20to%20the%20Use%20of%20Autonomous%20Ships.pdf.
[7]PRITCHETT P W. Ghost ships: why the law should embrace unmanned vessel technology[J/OL]. [2020-02-20].Tulane Maritime Law Journal, 2015, 40(1): 197-226. https://heinonline.org/HOL/P?h=hein.journals/tulmar40&i=205.
[8]CAREY L. All hands off deck? The legal barriers to autonomous ships[EB/OL].(2017-08-24)[2020-02-10]. https://ssrn.com/abstract=3025882.
[9]VOJKOVIC' G, MILENKOVIC' M. Autonomous ships and legal authorities of the ship master[J]. Case Studies on Transport Policy, 2020, 8(2), 333-340. DOI: 10.1016/j.cstp.2019.12.001.
[10]VEAL R, TSIMPLIS M, SERDY A. The legal status and operation of unmanned maritime vehicles[J]. Ocean Development & International Law, 2019, 50(1): 23-48. DOI: 10.1080/00908320.2018.1502500.
[11]CHANG Yen-Chiang, ZHANG Chao, WANG Nannan. The international legal status of the unmanned maritime vehicles[J]. Marine Policy, 2020, 113: 103830. DOI: 10.1016/j.marpol.2020.103830.
[12]ZHOU Xiangyu, HUANG Jinjing, WANG Fengwu, et al. A study of the application barriers to the use of autonomous ships posed by the good seamanship requirement of COLREGs[J]. The Journal of Navigation, 2019, 73: 1-16.DOI: 10.1017/S0373463319000924.
[13]嚴新平. 智能船舶的研究現狀與發展趨勢[J]. 交通與港航, 2016, 3(1): 23-26. DOI: 10.16487/j.cnki.issn2095-7491.2016.01.007.
[14]IMO. Convention on the international regulations for preventing collisions at sea (COLREGs), 1972 [EB/OL].[2020-02-20].http://www.imo.org/en/OurWork/Safety/Navigation/Pages/Preventing-Collisions.aspx.
[15]SZLAPCZYN′SKI R, GHAEMI H. Framework of an evolutionary multi-objective optimisation method for planning a safe trajectory for a marine autonomous surface ship[J]. Polish Maritime Research, 2019, 26: 69-79.DOI: 10.2478/pomr-2019-0068.
[16]鄭世江. 論無人運輸船的法律地位與公約適用[J]. 法制與社會, 2019(5): 206-208.DOI: 10.19387/j.cnki.1009-0592.2019.02.217.
[17]CMI. Maritime law for MASS[EB/OL].(2017-03-24)[2020-02-20].https://comitemaritime.org/work/mass/.
[18]VERGRD K I, TANNUM M S, HAAVARDTUN P, et al. Chase, no straighter: COLREG compliant anti-collision manoeuvres for crossing situations[C]//VERGRD K I. Robotic Sailing 2017. Springer, 2018: 81-91.DOI: 10.1007/978-3-319-72739-4_7.
[19]趙月林. 再論交叉相遇局面適用時機和保向保速的含義: 從“桑吉”輪與“長峰水晶”輪碰撞事故安全調查報告談起[J]. 世界海運, 2018, 41(9): 1-7.DOI: 10.16176/j.cnki.21-1284.2018.09.001.
[20]賀辭. CCS《智能船舶規范》六大功能模塊要求[J]. 中國船檢, 2016(3): 84-85.DOI: 10.3969/j.issn.1009-2005.2016.03.018.
[21]PERERA LP. Deep learning towards autonomous ship navigation and possible COLREGs failures[J]. Journal of Offshore Mechanics and Arctic Engineering, 2020, 142: 031102.DOI: 10.1115/1.4045372.
[22]LYU Hongguang, YIN Yong. COLREGs-constrained real-time path planning for autonomous ships using modified artificial potential fields[J]. The Journal of Navigation, 2019, 72: 588-608. DOI: 10.1017/S0373463318000796.
[23]HE Yixiong, JIN Yi, HUANG Liwen, et al. Quantitative analysis of COLREG rules and seamanship for autonomous collision avoidance at open sea[J]. Ocean Engineering, 2017, 140: 281-291.DOI: 10.1016/j.oceaneng.2017.05.029.
[24]鄭中義, 吳兆麟. 船舶對遇避碰決策的研究[J]. 大連海事大學學報, 1998, 24(3): 29-32.DOI: 10.16411/j.cnki.issn1006-7736.1998.03.008.
[25]PERERA L P, CARVALHO J P, SOARESC G. Solutions to the failures and limitations of mamdani fuzzy inference in ship navigation[J]. IEEE Transactions on Vehicular Technology, 2014, 63(4): 1539-1554.DOI: 10.1109/TVT.2013.2288306.
[26]王一斐. 無人船法律問題研究[D]. 北京: 中國政法大學, 2018.
(編輯 賈裙平)
