面向人工智能專業(yè)的機器人實踐課程群建設(shè)初探
2020-05-03 13:56:59栗輝李擎崔家瑞王粉花
高教學(xué)刊 2020年6期
栗輝 李擎 崔家瑞 王粉花

摘? 要:文章針對當(dāng)前人工智能專業(yè)機器人實踐教學(xué)的現(xiàn)狀,圍繞機器人相關(guān)課程,提出基于多種機器人實驗平臺的機器人實踐教學(xué)課程建設(shè),從而更好地滿足人工智能專業(yè)機器人的實踐教學(xué)需求和未來辦學(xué)方向。
關(guān)鍵詞:機器人技術(shù);實踐教學(xué);模塊化
中圖分類號:G640 文獻標(biāo)志碼:A? ? ? ? ?文章編號:2096-000X(2020)06-0041-03
Abstract: In view of the current situation of robot practice teaching in artificial intelligence specialty, this paper puts forward the course construction of robot practice teaching based on many kinds of robot experimental platform around robot related courses, thus better meet the needs of artificial intelligence professional robot practice teaching and future orientation.
Keywords: robotics; practical teaching; modularity
人工智能專業(yè)重點培養(yǎng)學(xué)生在智能認(rèn)知和智能無人系統(tǒng)設(shè)計兩方面的綜合能力,為畢業(yè)生從事智能無人系統(tǒng)的研究、設(shè)計、開發(fā)和管理工作提供技能基礎(chǔ)。2017年國務(wù)院發(fā)布了《新一代人工智能發(fā)展規(guī)劃》,部署構(gòu)筑我國人工智能發(fā)展的先發(fā)優(yōu)勢,加快建設(shè)創(chuàng)新型國家和世界科技強國。人工智能的快速發(fā)展對該專業(yè)學(xué)生的培養(yǎng)提出了更高層次的要求,尤其在實踐與創(chuàng)新能力方面,要求學(xué)生除了掌握扎實的專業(yè)理論知識外,更需要系統(tǒng)的實踐訓(xùn)練,而機器人相關(guān)技術(shù)作為人工智能專業(yè)重要的核心課程,其實踐教學(xué)內(nèi)容更需要不斷更新和發(fā)展。本文主要圍繞人工智能專業(yè)的實踐教學(xué)需求和未來辦學(xué)方向,研究探索機器人技術(shù)實踐課程群的改革[1][2]。
一、建設(shè)背景及意義
學(xué)院原有機器人教學(xué)平臺主要為DRRobot云臺輪式機器人,但該型號機器人平臺在實踐教學(xué)中有較強的局限性,主要表現(xiàn)為程序封裝性強,僅限于基于機器視覺的運動控制實驗,功能單一、程序固化,通用性和開放度不夠好,機器人基礎(chǔ)原理部分無法通過實驗體現(xiàn),可開放實驗較少,無法系統(tǒng)的為學(xué)生提供機器人技術(shù)相關(guān)課程的實驗實踐項目。因此,實驗室引入了“探索者”模塊化機器人平臺及Nao人形機器人成熟化產(chǎn)品,在原有《機器人組成原理》實驗課程的基礎(chǔ)上,結(jié)合新版培養(yǎng)計劃中《智能機器人》、《智能機器人應(yīng)用設(shè)計》等新開設(shè)的課程,設(shè)計了層次明確、開放性強的機器人實驗實踐教學(xué)體系,實現(xiàn)了從機器人底層原理到上層應(yīng)用的實踐教學(xué),保證知識的延續(xù)性并且逐層遞進。
面向人工智能專業(yè)的機器人實踐課程群體系的設(shè)計原則和思路主要包括以下幾點:
(一)模塊化教學(xué)
“探索者”模塊化機器人平臺包括連桿類、平板類和框架類等30多種零件,以及各類智能控制電子元器件,需要學(xué)生自己動手完成機器人從零開始的組裝設(shè)計,能夠激發(fā)學(xué)生的創(chuàng)作熱情。平臺模塊化的設(shè)計豐富了實驗內(nèi)容,教師可以根據(jù)課堂理論教學(xué)內(nèi)容,為學(xué)生準(zhǔn)備豐富的實驗教學(xué)主題,尤其在機器人基礎(chǔ)原理部分,可以更直觀詳盡的進行模塊化展示,夯實學(xué)生的理論基礎(chǔ)[3]。
(二)層次化教學(xué)
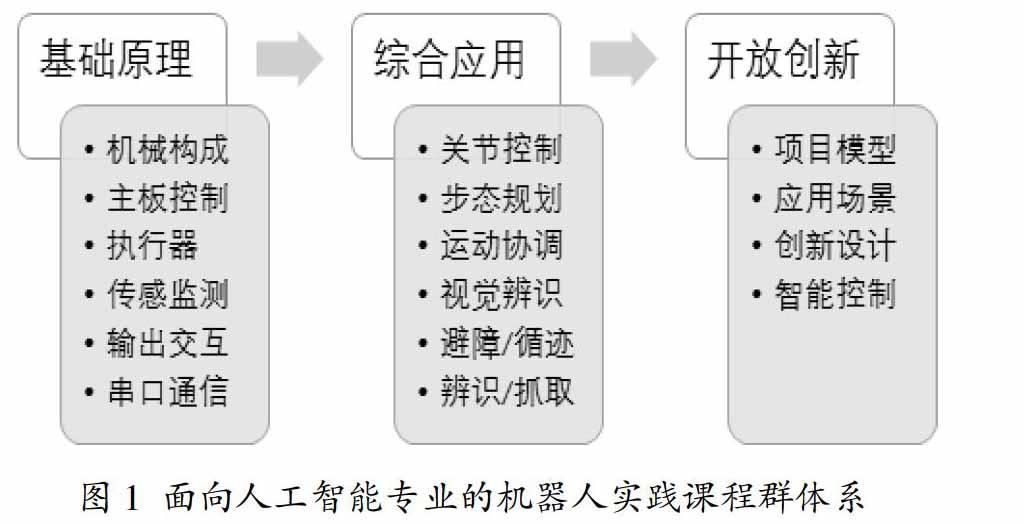
通過實踐教學(xué)經(jīng)驗的積累,構(gòu)建了體現(xiàn)層次化特征的三個階段實踐體系:基礎(chǔ)原理、綜合應(yīng)用、開放創(chuàng)新,而三種不同的機器人實驗平臺,也使得這三個階段既相對獨立,又互相銜接,滿足培養(yǎng)學(xué)生基礎(chǔ)理論、實踐能力、創(chuàng)新能力和工程素質(zhì)的需求。
(三)開放性教學(xué)
“探索者”模塊化機器人平臺適合讓學(xué)生自己動手設(shè)計各式結(jié)構(gòu)的機器人模型,各機器人構(gòu)件具備通用性、重構(gòu)性,構(gòu)件之間具有統(tǒng)一的接口,可根據(jù)用途進行組合,得到所需的機器人構(gòu)型及功能[3]。實驗過程中給出的實驗項目設(shè)計均為引導(dǎo)性、參考性實驗,學(xué)生均需要自行選取元器件進行組裝和編程,該平臺滿足了從機器人基礎(chǔ)原理到綜合應(yīng)用各個層次的開放性實驗,將實驗主導(dǎo)權(quán)更多的交予學(xué)生手中。
此外,在開放創(chuàng)新實驗中,DRRobot云臺輪式機器人和Nao人形機器人等更為成熟的機器人產(chǎn)品也為學(xué)生提供了更多的選擇,適合實際應(yīng)用背景的創(chuàng)新項目研發(fā)。
二、機器人技術(shù)實踐教學(xué)
面向人工智能專業(yè)的機器人實踐課程群主要分為三個層次,所設(shè)計的機器人實驗項目通過循序漸進的三個階段課程結(jié)合在機器人實驗平臺的實踐操作,讓學(xué)生能夠輕松入門,并在具備相應(yīng)基礎(chǔ)后進一步獲得創(chuàng)新實踐能力的提高。
(一)機器人組成原理基礎(chǔ)實驗
第一層次是機器人技術(shù)的基礎(chǔ)階段,開設(shè)課程有《機器人組成原理》,使用的硬件設(shè)備主要為“探索者”模塊化機器人平臺,其教學(xué)目標(biāo)是了解機器人技術(shù),實驗內(nèi)容主要包括機器人零件構(gòu)成、主控及編程、執(zhí)行器、檢測與交互、通信等基礎(chǔ)內(nèi)容。
(二)智能機器人綜合應(yīng)用實驗
第二層次是應(yīng)用階段,開設(shè)課程有《智能機器人》,使用的硬件設(shè)備包括“探索者”模塊化機器人平臺及DRRobot云臺輪式機器人,其教學(xué)目標(biāo)是通過深入學(xué)習(xí)單片機控制器、舵機、傳感器的內(nèi)部原理、使用方式,以項目的方式設(shè)計實驗內(nèi)容,配合特定的電子模塊以及應(yīng)用場景,達到鞏固知識、鍛煉實踐能力的目的。實驗中需要學(xué)生自行選擇主控版、舵機執(zhí)行器、傳感器等零件模塊,完成機械組裝,最終編寫相應(yīng)的執(zhí)行程序來實現(xiàn)。主要內(nèi)容有掃地機器人、機械臂抓取、循跡小車、機器人運動及步態(tài)規(guī)劃、基于視覺的機器人運動控制實驗、基于顏色分揀機械臂的設(shè)計與實現(xiàn)等綜合設(shè)計性實驗。
(三)智能機器人開放創(chuàng)新實驗
第三層次是開放創(chuàng)新階段,開設(shè)有實踐課程《智能機器人應(yīng)用設(shè)計》,同時適用于科技創(chuàng)新、科技競賽、畢業(yè)設(shè)計等教學(xué)實踐環(huán)節(jié),使用的硬件設(shè)備包括“探索者”模塊化機器人平臺、DRrobot云臺輪式機器人、Nao人形機器人等所有機器人設(shè)備,其教學(xué)目標(biāo)為通過復(fù)雜完整的項目鍛煉學(xué)生的綜合實踐能力,該部分實驗內(nèi)容為開放性選題,鼓勵學(xué)生自選主題、自選設(shè)備、自行設(shè)計實現(xiàn)。教學(xué)過程采用CDIO的項目式教學(xué)開展,培養(yǎng)學(xué)生的工程技術(shù)水平和實踐素養(yǎng)。
三、應(yīng)用效果
案例1 課程設(shè)計實例
在智能機器人應(yīng)用設(shè)計、智能專業(yè)生產(chǎn)實踐等課程中,學(xué)生運用“探索者”模塊化機器人平臺自行設(shè)計組裝并編程實現(xiàn)的機器人模型。如圖2,圖3。
案例2 科技創(chuàng)新實例
該科技創(chuàng)新項目以DRrobot云臺輪式機器人為基礎(chǔ),研發(fā)一款針對礦井、地下未知空間和管道等空間的智能探測機器人,實現(xiàn)了半自動移動、自動避障、人臉人體識別進行跟隨,并添加Stm32單片機開發(fā)板、DHT11溫濕度傳感器、MQ135有害氣體檢測傳感器,實現(xiàn)了單片機將采集的溫濕度氣體濃度通過ZIGBEE_E30模塊無線射頻傳輸至上位機監(jiān)測。如圖4。
案例3 畢業(yè)設(shè)計實例
該畢業(yè)設(shè)計“基于Nao機器人的目標(biāo)識別和行為設(shè)計”,基于Nao機器人,設(shè)計一種控制算法,實現(xiàn)機器人自主搜尋、識別與定位目標(biāo)物體,運用機器人運動學(xué)原理規(guī)劃行走路徑,并調(diào)動機器人手臂實現(xiàn)對目標(biāo)物體的抓取,以實現(xiàn)為人們提供智能化服務(wù)的目的。如圖5,圖6。
四、結(jié)束語
本文通過對人工智能專業(yè)機器人實踐教學(xué)的改革探索,提出了模塊化、層次化、開放性的機器人實踐課程群建設(shè)。在教學(xué)過程中,學(xué)生能夠基于模塊化技術(shù)了解機器人組成原理,能夠自主性設(shè)計機器人應(yīng)用主題,并且結(jié)合科技創(chuàng)新、科技競賽提高學(xué)生自主創(chuàng)新能力和團隊協(xié)作精神,學(xué)生根據(jù)課程體系由淺入深的完成了機器人工程綜合應(yīng)用能力的系統(tǒng)性實踐訓(xùn)練,達到提高人工智能專業(yè)學(xué)生的實踐創(chuàng)新能力的目的,從而適應(yīng)新興技術(shù)的發(fā)展和未來社會技能型人才的需求。
參考文獻:
[1]許超,單晶,宋飛,等.模塊化機器人平臺的創(chuàng)新實驗設(shè)計與實現(xiàn)[J].遼寧大學(xué)學(xué)報(自然科學(xué)版),2018,45(02):129-132.
[2]朱海榮,吳瑜.基于工程教育專業(yè)認(rèn)證的機器人創(chuàng)新實驗平臺開發(fā)[J].實驗技術(shù)與管理,2018,35(11):32-37.
[3]王濱生,劉輝,劉佳男,等.模塊化機器人創(chuàng)新教學(xué)與實踐[M].哈爾濱工業(yè)大學(xué)出版社,2016.
猜你喜歡
海洋信息技術(shù)與應(yīng)用(2022年1期)2022-06-05 07:38:22
裝備制造技術(shù)(2021年2期)2021-07-21 05:38:44
現(xiàn)代裝飾(2020年5期)2020-05-30 13:01:56
中國核電(2017年2期)2017-08-11 08:00:56
流程工業(yè)(2017年4期)2017-06-21 06:29:52
流程工業(yè)(2017年4期)2017-06-21 06:29:50
考試周刊(2016年79期)2016-10-13 23:35:16
考試周刊(2016年79期)2016-10-13 23:26:02
大學(xué)教育(2016年9期)2016-10-09 08:34:10
大學(xué)教育(2016年9期)2016-10-09 08:17:37
