縱列式直升機雙旋翼氣動特性分析
2020-05-05 02:56:28陳建煒朱清華王坤朱振華申遂愿
航空工程進展 2020年2期
關鍵詞:效率
陳建煒,朱清華,王坤,朱振華,申遂愿
(南京航空航天大學 直升機旋翼動力學國家級重點實驗室,南京 210016)
0 引 言
與常規單旋翼直升機相比,縱列式直升機具有諸多優勢,比如更加緊湊的結構,更大的載重量,更強的抗側風能力,更高的懸停效率,允許較大的重心變化范圍等。這些優點決定了縱列式直升機具有廣闊的應用前景,軍事上,可應用于機降部隊、彈藥投送、艦船補給、吊運大型武器裝備等方面,民用方面,適用于災后物資運送、災民轉移、油氣開發、森林滅火等方面[1-4]。因此,對縱列式直升機的理論研究具有重要的現實意義。隨著國民經濟的發展,國內對于重型直升機以及無人運輸機的需求日益凸顯,縱列式直升機將成為未來發展的一個熱點。
然而,縱列式直升機前后兩個旋翼一般會有一定的重疊,其尾跡流場和氣動特性與常規單旋翼直升機有很大區別。無論是懸停狀態還是前飛狀態,前后旋翼之間都會產生嚴重且復雜的氣動干擾現象,造成性能損失的同時,還影響直升機安全飛行。因此,前后旋翼間的氣動干擾問題一直是縱列式直升機的一個重要的研究課題。早期的理論研究主要采用渦方法,A.Bagai等[5]首次使用自由尾跡方法對縱列式直升機兩旋翼進行了尾跡分析;D.A.Griffiths[6]采用自由尾跡模型分析了兩旋翼的干擾流場與地面效應;黃水林[7]采用自由尾跡方法對縱列式直升機雙旋翼氣動干擾特性進行了研究。然而,渦方法無法捕捉干擾流場的細節特征,這給進一步深入研究帶來了困難。近年來,CFD方法發展迅速,在縱列式雙旋翼干擾流場的模擬上也有所應用。Tong Z等[8]基于N-S方程對共軸、縱列式雙旋翼干擾特性展開了研究;A.Dimanlig等[9]采用嵌套網格方法對CH-47模型進行了數值模擬;吳林波[10]采用基于Euler方程與動量源模型的CFD方法開展了縱列式雙旋翼/機身流場研究。然而,針對縱列式雙旋翼直升機的CFD研究還處于起步階段,以往的研究多存在未考慮空氣粘性或耗時過長的問題,且這些研究基本沒有對干擾下前后旋翼氣動現象產生的原因進行更深入的研究。
鑒于此,本文采用高效的動量源方法,基于N-S方程和k-ωSST湍流模型,對縱列式直升機兩旋翼間的氣動干擾問題進行數值研究。首先,使用本文建立的數值方法,對懸停狀態單旋翼進行計算,驗證本文所建立方法的可靠性;然后,對懸停狀態兩旋翼干擾流場進行計算,并在隨后的模擬中加入來流,對孤立旋翼狀態、雙旋翼流場前向來流狀態與后向來流狀態分別進行計算;最后,在計算結果的基礎上,結合流場特性,對前后旋翼相互干擾下氣動現象產生的原因進行分析,得出具有實際意義的結論,以期為縱列式直升機的研制提供一定的技術支持。
1 數值方法
1.1 動量源方法與控制方程
本文采用動量源方法模擬縱列式直升機旋翼流場,將旋翼產生的氣動力以動量源的形式加載在槳盤上,并假設此時旋翼的周期性轉動為“準定常”流動。采用該方法在大幅提高計算效率的同時,保證了旋翼下洗流場的本質屬性[11-12]。
加載在槳盤上的動量源項[13]為
(1)

本文所研究的旋翼轉速較低,槳尖馬赫數為0.17,因此采用有粘不可壓縮流體假設,控制方程采用包含動量源項的N-S方程[14]。
其中,連續性方程與X方向動量守恒方程均采用微分形式,分別為
(2)
(3)

Y和Z方向的動量守恒方程以此類推。
1.2 湍流模型及邊界條件
采用FLUENT流體計算軟件對兩旋翼干擾流場進行計算,選用基于壓力隱式求解器,控制方程使用二階迎風格式的有限體積法進行離散,在湍流模型的選擇上,采用k-ωSST兩方程湍流模型[15],該模型對渦流場具有較高的捕捉精度,在兩旋翼干擾流場的模擬上具有良好的表現[16-18]。
遠場邊界條件采用無反射邊界條件,采用一維Riemann不變量來保證遠場邊界滿足該條件,Riemann不變量可以表示為
(4)
式中:α為當地聲速;Vn為遠場邊界處流出速度的法向分量[19]。
1.3 計算模型與網格劃分
旋翼參數如表1所示,計算域直角坐標系原點位于前旋翼槳轂中心,后旋翼槳轂中心處于ZOY平面。定義前旋翼旋向為逆時針,后旋翼旋向為順時針。本文主要研究前后旋翼間的干擾,因此忽略了機身對流場的影響。

表1 數值模擬旋翼參數
計算域網格采用混合網格,槳盤處為結構網格,外流場采用非結構網格。直升機旋翼幾何模型如圖1所示,網格劃分示意圖如圖2所示。
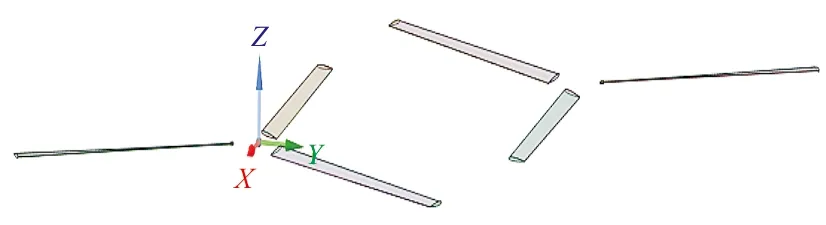
圖1 直升機旋翼幾何模型Fig.1 Geometry model of helicopter rotor
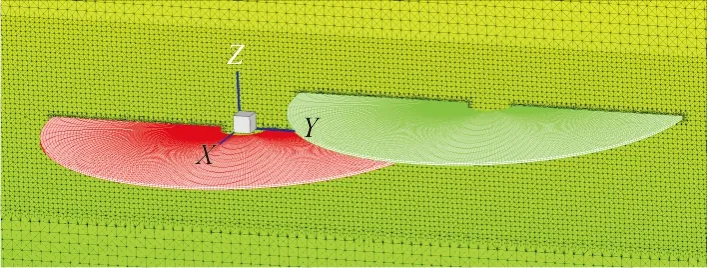
圖2 旋翼流場網格示意圖Fig.2 Rotor flow field grid diagram
2 動量源方法算例驗證
為了驗證本文所建立的數值研究方法的可靠性,以NASA ROBIN旋翼[20]懸停狀態為算例,將槳盤下方0.215R處動壓分布試驗數據與本文計算結果進行對比。動壓分布如圖3所示。

圖3 槳盤下方動壓分布Fig.3 Dynamic pressure distribution under the rotor disk
從圖3可以看出:槳盤下方0.215R處動壓分布計算結果與試驗值趨勢基本一致,表明本文建立的基于動量源模型的數值模擬方法能準確預測旋翼下洗流場。
3 數值模擬及流場特征分析
為了更直觀地表現兩旋翼的干擾作用對旋翼性能的影響,定義升力干擾系數KL,其為干擾作用下前、后旋翼計算升力與對應流場情況下單旋翼升力之比,計算公式為
KL1(2)=L1(2)/Lisolated
(5)
定義前、后旋翼效率計算公式:
(6)
為了表現前后旋翼的干擾作用對縱列式雙旋翼直升機系統性能的影響,定義雙旋翼效率計算公式:
(7)
式中:L為旋翼升力;CL為旋翼升力系數;mK為旋翼功率系數。
3.1 懸停狀態流場分析
針對縱列式直升機懸停狀態,使用本文建立的數值模擬方法對兩旋翼之間的氣動干擾進行數值模擬,并結合計算結果與流場特性,對氣動干擾現象進行了分析。
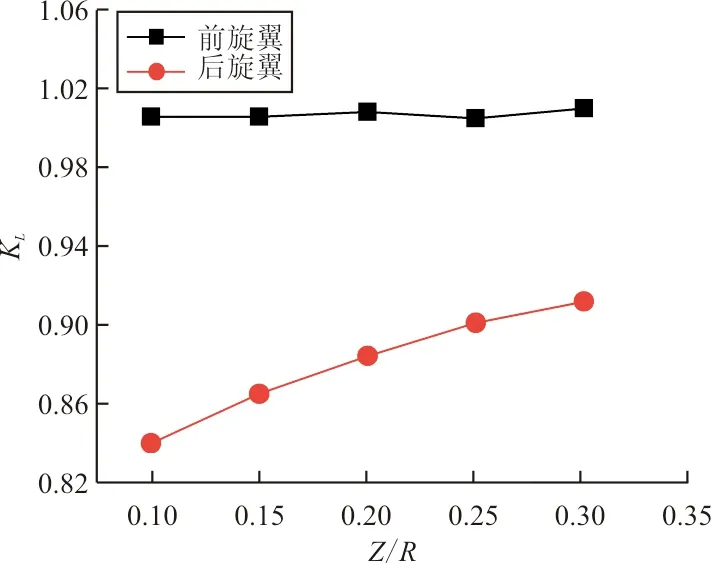
縱列式直升機兩旋翼升力干擾系數隨軸向間距的變化如圖4(a)所示,此時固定兩旋翼縱向間距Y/R=1.3,軸向間距Z/R在0.1~0.3變化。可以看出:受兩旋翼相互干擾作用,前后旋翼升力干擾系數均小于1,即兩旋翼升力均小于單旋翼狀態,且后旋翼升力始終大于前旋翼;隨著軸向間距增大,后旋翼升力增加,前旋翼升力降低,最低處升力損失為8.6%。
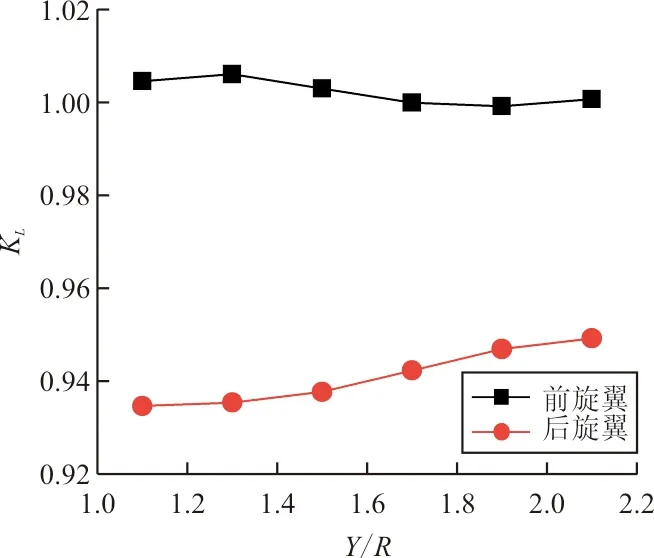
縱列式直升機兩旋翼升力干擾系數隨縱向間距的變化如圖4(b)所示,此時固定兩旋翼軸向間距Z/R=0.2,縱向間距Y/R在1.1~2.1變化。可以看出:隨縱向間距增大,前旋翼升力變化較大,總體上呈增大趨勢,在Y/R=1.9時達到最大值,高于Y/R=1.1時9.3%,且此時前旋翼的升力超過了后旋翼;后旋翼升力變化不大,總體上呈降低趨勢。

(a) 隨軸向間距變化
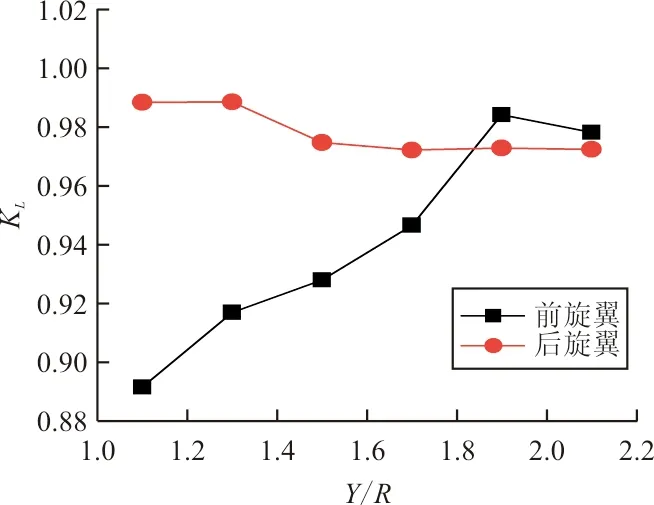
(b) 隨縱向間距變化圖4 升力干擾系數隨間距的變化(懸停狀態)Fig.4 Interaction factor of lift v.s. rotor separation (Hovering state)
旋翼效率隨前后旋翼軸向間距與縱向間距的變化如圖5所示,圖中分別給出前后旋翼與雙旋翼的效率變化。可以看出:由于干擾的存在,前后旋翼效率均小于單旋翼狀態,隨軸向間距增大,前旋翼效率基本不變,后旋翼效率增加,兩旋翼效率也略有增加;隨縱向間距增大,前旋翼效率增加,最低處在Y/R=1.1處,低于單旋翼狀態10.3%,最大效率出現在Y/R=1.9處;后旋翼效率總體上呈降低趨勢;同時,前旋翼、后旋翼、雙旋翼效率曲線相交于一點,這與文獻[21]中帶負扭旋翼的試驗結果相一致,本文算例相交于Y/R=1.74處。
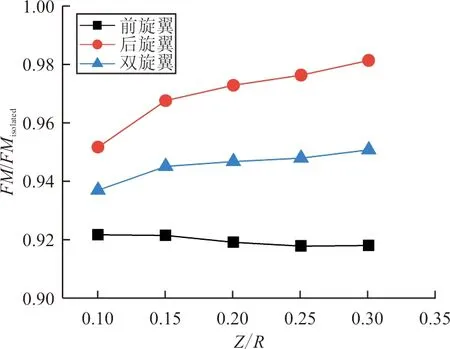
(a) 隨軸向間距變化

(b) 隨縱向間距變化圖5 旋翼效率隨間距的變化(懸停狀態)Fig.5 Rotor efficiency v.s. rotor separation (Hovering state)
Z/R=0.2,Y/R=1.1與Y/R=1.9處縱列式直升機前后旋翼槳盤誘導速度分布云圖如圖6所示,可以看出:在Y/R=1.1狀態,受后旋翼的下洗流影響,前旋翼在與后旋翼投影重疊的部分誘導速度明顯增大,這是導致此時前旋翼升力損失的主要
原因,而后旋翼槳盤誘導速度受前旋翼影響較小;在Y/R=1.9狀態,由于前后旋翼投影重疊區域減小,前旋翼槳盤處誘導速度基本不再受后旋翼影響。

(a) Y/R=1.1狀態
懸停狀態ZOY剖面速度流線圖如圖7所示,在Y/R=1.1時,前旋翼在槳盤投影重疊側產生明顯的槳尖渦,這也是導致升力損失的一個原因;而在Y/R=1.9時,后旋翼的尾跡邊界剛好處于前旋翼槳尖附近,前旋翼槳尖渦消失,后旋翼對前旋翼槳尖產生有利效應,此時旋翼升力與效率增大,這與文獻[22]中橫列式直升機的氣動干擾現象相一致。

(a) Y/R=1.1狀態

(b) Y/R=1.9狀態圖7 懸停狀態速度流線圖Fig.7 Velocity streamline of hovering state
Z/R=0.2狀態ZOY截面前旋翼槳盤處下洗誘導速度分布如圖8所示,體現了不同縱向間距下后旋翼對前旋翼的干擾作用。可以看出:前后旋翼投影重疊區域誘導速度明顯增大,最大下洗普遍出現在后旋翼槳尖下方,誘導速度的變化直接導致前旋翼升力與效率的變化。

圖8 前旋翼槳盤處誘導速度分布Fig.8 Induced velocity distribution at the front rotor disk
3.2 有來流狀態流場分析
3.2.1 前向來流狀態
在流場中加入前向來流,給定來流速度6、10 m/s,方向沿Y軸正向,即模擬縱列式直升機迎風狀態。
6 m/s來流作用下前后旋翼的升力干擾系數隨兩旋翼相對位置的變化如圖9所示,可以看出:在來流作用下,前旋翼的升力始終高于后旋翼,這與懸停狀態的模擬結果截然相反;隨著軸向間距的變化,前旋翼升力略大于單旋翼狀態,且基本不受軸向間距變化的影響;后旋翼升力隨軸向間距增大而增大,最低處為Z/R=0.1時,升力損失為16%;隨旋翼縱向間距增大,前旋翼升力基本不受后旋翼影響,后旋翼升力增大,最大升力損失為11.9%。
(a) 隨軸向間距變化

(b) 隨縱向間距變化圖9 升力干擾系數隨間距的變化(前向來流速度為6 m/s)Fig.9 Change for interaction factor of lift with rotor separation(Flow speed in front is 6 m/s)
前向來流狀態下旋翼效率的變化如圖10所示,可以看出:由于前旋翼的干擾作用,后旋翼效率顯著降低;隨著軸向間距的增大,前旋翼效率略大于單旋翼狀態,且基本不變,后旋翼效率增加,最低處效率僅為單旋翼狀態的65.5%;而隨著縱向間距的變化,旋翼效率基本不變,此時由于前后旋翼的干擾作用,兩旋翼總體效率下降了約15%。

(b) 隨縱向間距變化圖10 旋翼效率隨間距的變化(前向來流速度為6 m/s)Fig.10 Change of rotor efficiency with rotor separation (Flow speed in front is 6 m/s)
10 m/s來流作用下前后旋翼的升力干擾系數與效率隨兩旋翼相對位置的變化分別如圖11~圖12所示。

(a) 隨軸向間距變化
(b) 隨縱向間距變化圖11 升力干擾系數隨間距的變化(前向來流速度為10 m/s)Fig.11 Change of interaction factor of lift with rotor separation(Flow speed in front is 10 m/s)

(a) 隨軸向間距變化

(b) 隨縱向間距變化圖12 旋翼效率隨間距的變化(前向來流速度為10 m/s)Fig.12 Change of rotor efficiency with rotor separation (Flow speed in front is 10 m/s)
從圖11~圖12可以看出:在10 m/s來流作用下,前旋翼的升力干擾系數與效率始終高于后旋翼,其變化趨勢與6 m/s前向來流狀態基本一致,但相比之下后旋翼的升力干擾系數顯著增大;最低效率出現在Z/R=0.1,Y/R=1.3處,為單旋翼狀態的69.9%,大于相同位置6 m/s來流狀態,即此時前旋翼對后旋翼的干擾作用減小。
ZOY平面Z/R=0.2,Y/R=1.3處6、10 m/s前向來流狀態下的速度流線圖如圖13所示,可以看出:在來流的作用下,前旋翼尾跡傾斜,對后旋翼產生了明顯干擾,隨著前飛速度增大,干擾減小,而后旋翼對前旋翼的流場影響很小。這解釋了上文前向來流作用下前后旋翼的升力與效率的變化趨勢。

(a) 6 m/s前向來流狀態

(b) 10 m/s前向來流狀態圖13 前向來流狀態速度流線圖Fig.13 Velocity streamline of forward flow state
3.2.2 后向來流狀態
后向來流速度為6 m/s,方向沿Y軸負向,模擬縱列式直升機在懸停狀態下受后向來流影響。升力干擾系數如圖14所示,可以看出:與前向來流狀態相反,后旋翼升力與單旋翼狀態基本重合,而前旋翼產生了較大的升力損失,最大損失達28.9%,遠大于相同來流速度下前向來流狀態后旋翼的升力損失;隨著軸向間距增大,前旋翼升力降低,這與其他狀態的模擬結果截然相反。
此時旋翼效率的變化曲線如圖15所示,可以看出:后旋翼效率與單旋翼狀態基本一致,前旋翼最低效率僅為單旋翼狀態的54.2%,雙旋翼總體效率損失普遍達到20%以上,可見此狀態前旋翼所受干擾是很嚴重的。

(a) 隨軸向間距變化

(b) 隨縱向間距變化圖14 升力干擾系數隨間距的變化(后向來流速度為6 m/s)Fig.14 Interaction factor of lift v.s. rotor separation (Backward flow speed is 6 m/s)

(a) 隨軸向間距變化

(b) 隨縱向間距變化圖15 旋翼效率隨間距的變化(后向來流速度為6 m/s)Fig.15 Rotor efficiency v.s. rotor separation (Backward flow speed is 6 m/s)
后向來流速度為6 m/s時,速度流線圖如圖16所示,旋翼槳盤處誘導速度分布云圖如圖17所示,可以看出:此時后旋翼向前傾斜的尾流直接作用在前旋翼上,前旋翼槳盤下洗誘導速度明顯增大,直接導致前旋翼升力損失,而后旋翼處于前旋翼尾流的上方,因而受前旋翼干擾影響較小;隨著軸向間距增大,前旋翼受后旋翼下洗流影響范圍擴大,升力損失更明顯。
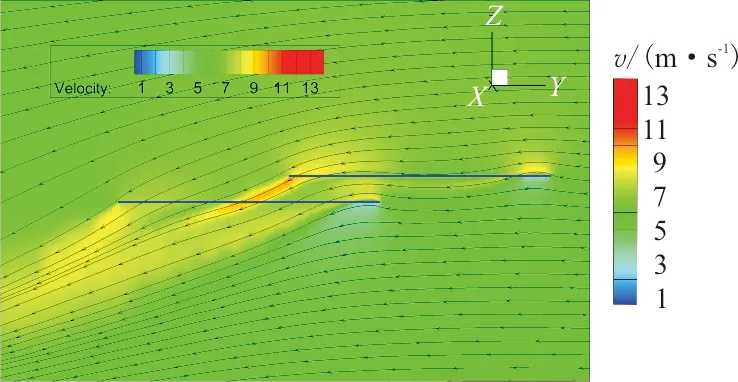
圖16 后向來流狀態下速度流線圖Fig.16 Velocity streamline of backward flow state

圖17 旋翼槳盤處誘導速度分布云圖(后向來流狀態)Fig.17 Induced velocity distribution at the rotor disk (Backward flow state)
4 結 論
(1) 本文建立的基于動量源模型和N-S方程,采用k-ωSST湍流模型的數值研究方法,能準確預測旋翼下洗流場。
(2) 在懸停狀態,縱列式直升機前后旋翼的干擾作用會降低旋翼的升力與效率,前旋翼受后旋翼下洗流影響較大,最大升力損失為10.3%。
(3) 在懸停狀態,隨著兩旋翼縱向間距增大,前旋翼升力增大,直至超過后旋翼升力。在Y/R>1.74后,后旋翼下洗流會對前旋翼槳尖產生有利效應,前旋翼效率開始大于后旋翼。
(4) 前向來流狀態,前旋翼尾跡傾斜,對后旋翼產生較大干擾,軸向間距越大,干擾越小。在6 m/s來流速度下,后旋翼最大升力損失為16%,當速度達到10 m/s,前旋翼對后旋翼干擾作用減小。
(5) 后向來流狀態,后旋翼尾跡直接作用在前旋翼槳盤處,對前旋翼產生嚴重干擾,最大升力損失達28.9%,最低效率僅為單旋翼狀態的54.2%。
(6) 本文建立的動量源模型未計入來流下旋翼的揮舞運動,與實際情況會存在一些偏差,但前后旋翼相互干擾的總體變化趨勢與干擾作用下的流場特性可供讀者參考。
猜你喜歡
瘋狂英語·初中天地(2021年5期)2021-07-21 02:24:28
甘肅教育(2020年14期)2020-09-11 07:57:42
中學生數理化(高中版.高考數學)(2020年5期)2020-06-02 09:19:08
商周刊(2017年9期)2017-08-22 02:57:49
遼寧經濟(2017年6期)2017-07-12 09:27:16
中國衛生(2016年9期)2016-11-12 13:27:54
時代英語·高二(2015年1期)2015-03-16 00:08:11
中國洗滌用品工業(2015年7期)2015-02-28 19:02:38
電子設計工程(2015年12期)2015-02-27 12:06:10
中國衛生(2014年11期)2014-11-12 13:11:32