天翼1無人機電動化改造可行性分析
2020-05-06 06:25:26鄒寧姚小軼梁爽杜圣超
航空工程進展 2020年2期
鄒寧,姚小軼,梁爽,杜圣超
(航空工業成都飛機工業(集團)有限責任公司 技術中心,成都 610092)
0 引 言
電動飛機是指以電能作為推進能源的飛機,其優點是高效節能、環境友好,能夠實現零排放或極低排放;噪聲和振動水平極低,乘坐舒適性好(對于軍事用途而言隱蔽性好);結構簡單,使用維護簡單,經濟性好等[1-3]。在小型飛機中,用電池代替燃油作為初級能源,不僅沒有污染,而且規避了航空燃油獲取困難,價格昂貴的缺點,擴展了飛機的使用范圍。由于這些優點,電動飛機迅速成為近年來航空領域的研究熱點之一,受到廣泛關注[4]。
純電動飛機已被國內外的飛機公司研制成功,有些已實現了批量生產,并廣泛應用于飛行員培訓、旅游觀光、私人飛行和航空攝影等通用航空領域。捷克Phoenix Air飛機公司2011年推出了Phoenix Air U-15電動滑翔機,最新的升級版本將有超過2 h的續航時間,該機已經取得捷克實驗類輕型運動飛機適航許可(ELSA)。捷克Skyleader飛機公司的SL400 是一款下單翼并列雙座電動飛機,屬于歐洲標準的超輕型運動類飛機,該機具有可收放的起落架和全金屬機身,使用液冷電機,最大飛行速度230 km/h,航時1.5 h,已于2017年秋季首飛成功,目前已經取得捷克實驗類輕型運動飛機適航許可。斯洛文尼亞蝙蝠公司(Pipistrel Aviation)的電動飛機Alpha Electro于2017年推向市場,同年即獲得24架的訂單,該機因其技術成熟、指標先進,成為當前電動飛機市場的代表作。我國沈陽通用航空研究院研制的國內首款電動雙座輕型飛機“銳翔”RX1E于2013年實現首飛,2015年獲得國家民航局頒發的輕型運動飛機“型號設計批準書”和生產許可證,已實現量產交付。該機的最新改進型RX1E-A續航時間已提高到2 h,符合世界主要地區對電動輕型飛機續航能力的要求[5]。電動飛機正在影響著未來航空的發展方向,先進電動飛機有望廣泛應用于通用航空等領域,大幅度改善人類的生活和生產方式,開創電動力航空時代[6]。
目前在無人機領域,采用電動機作為動力主要集中在微小型無人機、無人旋翼機和太陽能無人機。質量大且航時較長的無人機基本都采用了燃油動力系統。隨著電動機、電池等技術的發展,將現有的燃油動力無人機改造為電動無人機在技術上已變得可行。對適合的無人機進行電動化改造,可提高無人機的環保性、安全性、可靠性和維護性。電動機相對于燃油發動機幾乎可以做到零排放,減少對環境的污染。同時電動機系統與燃油發動機系統相比,系統組成更加簡潔,更利于維護,安全性更高(不存在燃油泄漏甚至著火的危險),也具有更高的可靠性(空中停車的可能性更低)。另外電動化改造后無人機的控制將變得更加簡單,同時還能降低使用成本(每次任務只需要充電,而不是消耗相對昂貴的燃油),可獲得更好的經濟效益。
天翼1無人機是航空工業成都飛機工業(集團)有限責任公司(簡稱成飛公司)現有的一款成熟無人機,采用活塞式汽油發動機。本文對天翼1無人機電動化改造的可行性進行分析。
1 天翼1無人機簡介
天翼1無人機是成飛公司自行研制的輕型多用途無人機,具有小型化、集成化、智能化等特點[7]。該無人機具備滑跑起飛、車載起飛、火箭助推起飛、滑跑著陸、傘降回收多種起降方式,可以滿足用戶不同使用條件的需求。在航空遙感、氣象探測、環境監測、邊防巡邏、海事監測、應急救災、航空測繪、森林防火監視、高壓電線與輸油管路巡查等眾多領域都有其用武之地。目前天翼1無人機已交付于國家環境保護部衛星環境應用中心[8],并參與了多次執法行動,在環境監測領域發揮了巨大作用。天翼1無人機模型如圖1所示。
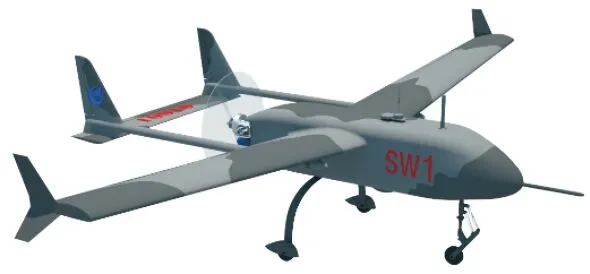
圖1 天翼1無人機Fig.1 SW1 UAV
天翼1無人機基本參數如表1所示。
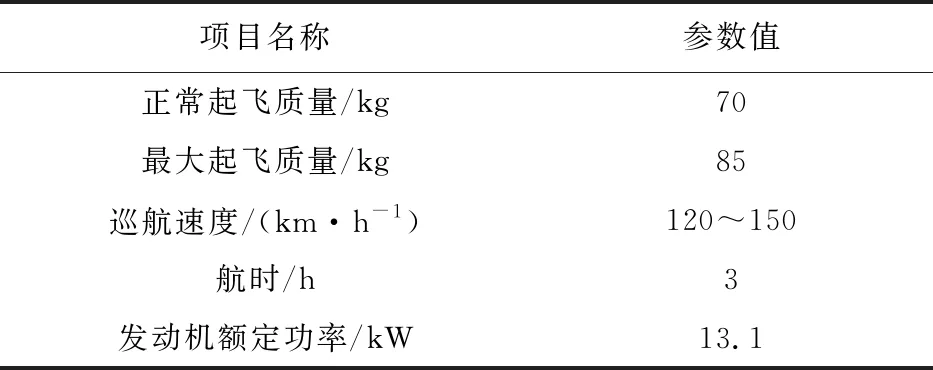
表1 天翼1無人機基本參數
2 電動化改造分析
2.1 改造方案
傳統飛機通過發動機將燃料的化學能轉化為機械能產生動力,與之相對的電推進飛機通過電動機驅動涵道式風扇、螺旋槳或其他裝置產生動力,直接將電能轉化為機械能[9]。
天翼1無人機電動化改造將拆除原有的燃油動力系統,換裝以鋰電池組為能源,電動機為動力的電推進系統。電推進系統是電動飛機的核心,電動飛機的性能和用途主要取決于其電推進系統[10]。電推進系統由電動機、螺旋槳、電動機控制器、鋰電池組、電源管理系統(BMS)組成,系統交聯關系如圖2所示,螺旋槳沿用天翼1無人機原螺旋槳。此外還需要對無人機的配電設備和配電方式進行調整,同時飛控的控制策略也要做相應修改。
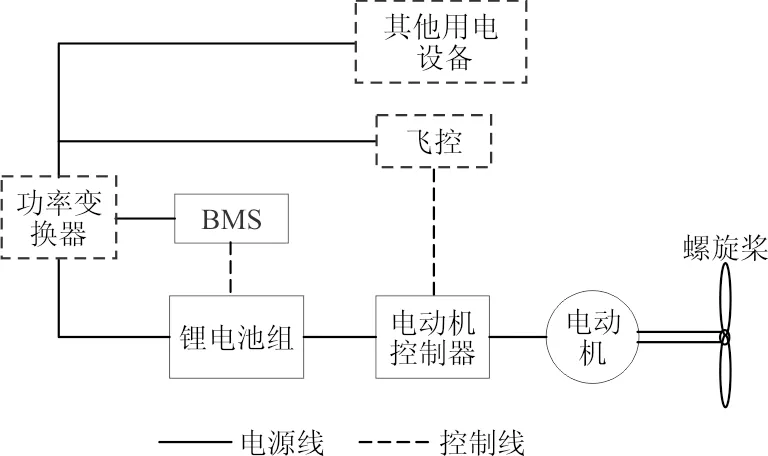
圖2 電推進系統交聯圖Fig.2 Cross-linking of electric propulsion system
電推進系統要滿足各飛行狀態下的最大推力要求,在續航時間內提供所需的推力并為機載設備供電[11]。通過計算飛機飛行剖面各狀態所需的功率和能量,由各狀態所需功率確定電動機的功率,由飛行剖面總能量確定電池的電容量[12]。
2.2 電動機需求分析
選擇合適的電動機,需要對無人機各飛行狀態所需的最大功率進行綜合分析。如果選擇的電動機功率過小,電動機會經常處于高過載狀態工作,這會縮短電動機的使用壽命甚至導致無人機無法起飛[12];相反,如果所選電動機功率過大,則無法發揮出電動機最佳工作狀態,且所需電量也會增大,這會增加電動機和電池質量,對電動機和電池造成浪費,同時影響無人機性能。
通過對天翼1無人機飛行任務剖面的分析,可知無人機在起飛時的爬升階段所需功率最大。因此選擇起飛時需要的最大功率作為電動機額定功率。無人機在起飛時所需的最大推力可由以下方程式組求出:
(1)
式中:a1為飛機起飛爬升時的加速度;Vl為爬升結束時的平飛速度(取150 km/h);Vtk為起飛速度(取100 km/h);Sc為爬升飛行的距離(設爬升高度為1 000 m,則Sc=1 000/sinβ);D為阻力;S為機翼面積;ρ為空氣密度(取海平面空氣密度);β為爬升角(取5°);CD為阻力系數;Fc為起飛時最大推力;m為無人機質量(取最大起飛質量85 kg);g為重力加速度(取9.8 m/s2)。
代入各參數值可求得Fc=180.68 N。假設無人機做定常爬升飛行,則所需最大功率為
螺旋槳效率ηp取0.8,電動機效率ηe取0.95,則所需的電動機功率為
實際選擇電動機時應考慮一定的余量,這里參考天翼1無人機的動力系統,選取額定功率13 kW的電動機。
2.3 鋰電池組電容量分析
鋰電池組電容量需要根據無人機任務剖面內各階段的耗電量進行分析確定。本文選擇天翼1無人機滑跑起飛、傘降回收起降方式的任務剖面,該剖面包含以下幾個階段:地面等待、滑跑、爬升、巡航、下滑、傘降回收,如圖3所示,其中傘降回收階段,除切傘外全機基本無其他電量消耗,且切傘所耗電量極低,可忽略不計。

圖3 天翼1無人機任務剖面Fig.3 Mission profile of SW1 UAV
按最佳航時進行分析,無人機質量取正常起飛質量70 kg,起飛速度取100 km/h,巡航速度取120 km/h,爬升高度取1 000 m,電動機控制器效率ηc取0.98,則電推進系統的總效率
η=ηpηeηc=0.8×0.95×0.98=0.744 8
下面分別對各階段所需電量進行分析。
地面等待階段:這一階段的時間設為1 min,所需功率取電動機額定功率的1/5,則這一階段的耗電量為
滑跑階段:假設這一階段無人機作等加速度運動,這一階段的時間可以由式(2)求出
(2)
式中:Srun為起飛滑跑距離,設為150 m;a2為滑跑加速度,可求得時間trun=10.8 s。
這一階段電動機功率取爬升階段起飛時功率的90%,求出爬升階段起飛時的需用最大功率為4 257 W,則滑跑階段的耗電量為
=0.015 kW·h
爬升階段:由式(1)和Vl=Vtk+a1tclimb,可求得爬升所需時間為376 s,則這一階段的耗電量為
=0.596 kW·h
巡航階段:這一階段的需用功率為
(3)
式中:K為升阻比,取15,可求得Pcruise=1.524 kW,巡航時間按2 h計算,則這一階段的耗電量為
下滑階段:開傘高度距地面約200 m,下滑高度為1 000-200=800 m。這一階段的需用功率取巡航階段的80%,下沉率取3 m/s,則這一階段的耗電量為
=0.121 kW·h
傘降回收階段:考慮30 min的巡航時間余量,則有
機上其他用電設備的總功率為400 W,2 h的耗電量為
Wother=Pothertother=0.4×2=0.8 kW·h
因此鋰電池組的總電容量應為
Wcell=Wwait+Wrun+Wclimb+Wcruise+Wglide+
Wsave+Wother=6.707 kW·h
2.4 改造可行性分析
首先分析天翼1無人機電動化改造后全機質量變化。目前廣泛使用的電動機系統功率密度普遍低于燃氣渦輪發動機的水平,電動機系統的功率密度問題嚴重影響了電推進系統的推廣使用[13]。現有小型電動飛機的電動機額定功率密度基本為2 kW/kg。斯洛文尼亞Pipistrel公司的Taurus Electro G2飛機中,使用了30 kW永磁同步電機,其轉速在2 000 rpm左右,質量僅為11.8 kg[14]。國內外電動機廠商正在研制功率密度大于3 kW/kg的電動機。有報道稱全超導電動機的功率密度理論上能超過25 kW/kg[15],但這僅停留在對大型電推進飛機的理論研究。隨著對電動機材料改進,電動機結構優化和電動機容錯性能優化等,未來電動機的功率密度會進一步提高。因此可以假定天翼1無人機電動化改造使用的電動機功率密度為3 kW/kg,則可計算出電動機質量為13/3≈4.33 kg。
早期電池能量密度遠低于燃油能量密度[16]。近年來,隨著電動汽車的飛速發展,鋰電池技術發展迅速。松下公司為特斯拉電動車Model3研制的21700電池于2017年7月28日隨車一起公布,能量密度達到了300 W·h/kg。2018年特斯拉CEO埃隆·馬斯克表示,特斯拉在電池技術方面獲突破性進展,能量密度再提升30%,并且生產成本大幅下降[17]。參考這個數據,再考慮鋰電池技術的發展,可假定改造選取的鋰電池組能量密度為330 W·h/kg,則其質量為6 707/330≈20.32 kg。
天翼1無人機電動化改造前后主要換裝推進系統設備的質量對比如表2所示,其中電動機控制器、BMS和增加電纜質量是參考現有電動飛機進行的預估。
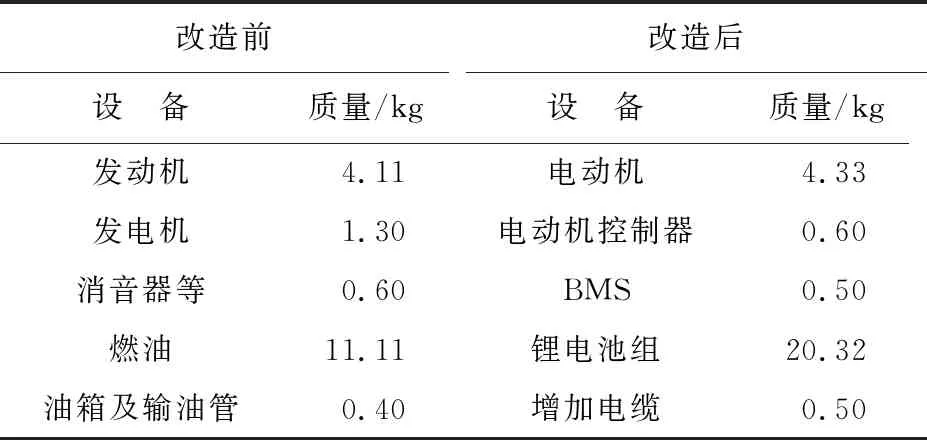
表2 推進系統質量對比
從表2可以看出:電動化改造前燃油動力系統質量為17.52 kg,改造后電推進系統質量為26.25 kg,電動化改造后無人機質量增加了約9 kg,正常起飛質量變為79 kg。計算出巡航時間為1.77 h,比改造前航時3 h減少較多。如果再考慮質量變化引起的其他飛行階段耗電量增加,航時還會有所減少。
再來分析電推進系統在天翼1無人機上安裝的可行性。天翼1無人機總體布置如圖4所示,可以看出:電動機安裝在機身尾部原發動機安裝位置,空間富余;鋰電池組將安裝在機身中部油箱位置。參考21700電池單體參數:外徑21 mm,高度70 mm,標稱容量4 600 mA·h,電壓標稱3.7 V,可以計算出滿足6.707 kW·h的電池總體積約為0.012 m3。天翼1無人機油箱艙容積約為0.021 m3,即使考慮鋰電池組封裝增加殼體帶來的尺寸增加,油箱艙的尺寸也能夠滿足鋰電池組的安裝需求。也可以考慮在采用滑跑起降方式的天翼1無人機中取消回收傘,再增加一塊與回收傘質量相同的鋰電池組裝到傘艙,這樣就能獲得更多的航時。

圖4 天翼1無人機總體布置Fig.4 Overall layout of SW1 UAV
綜上所述,天翼1無人機改造前后除鋰電池組外,其他機載設備質量變化不大,且鋰電池組安裝于全機重心附近,因此不會對無人機重心位置變化產生大的影響。此外,天翼1無人機本身具有較大的靜安定裕度,因此可以初步確定改造時無需對機上其他設備布置進行調整。
3 結 論
(1) 天翼1無人機電動化改造基本可行,但是會付出一定的質量和性能代價(全機質量增加約9 kg,巡航時間減少了一個多小時)。
(2) 在實際改造中還應當仔細研究電推進系統中的其他設備,以及如何實現電推進系統與機上其他設備的交聯。同時還要考慮全機電磁兼容,電動機和電池的散熱、隔熱等問題。另外改造成本也應當作為重要的考慮因素。
(3) 在后續的研究中將繼續關注電推進系統相關技術的發展,尋找合適的電動機和鋰電池,完善改造方案,最終實現對天翼1無人機的電動化改造。
猜你喜歡
工業設計(2022年8期)2022-09-09 07:43:20
環球時報(2022-05-30)2022-05-30 15:16:57
中學生數理化·八年級物理人教版(2021年12期)2021-12-31 03:23:08
軍民兩用技術與產品(2021年10期)2021-03-16 06:05:30
北京測繪(2020年12期)2020-12-29 01:33:58
中學生數理化·中考版(2020年10期)2020-11-27 01:59:48
中國生殖健康(2019年2期)2019-08-23 08:12:08
當代陜西(2019年11期)2019-06-24 03:40:28
家庭影院技術(2017年9期)2017-09-26 03:41:45
作文周刊·小學一年級版(2017年9期)2017-06-20 00:19:33