基于MIMO的認(rèn)知雷達(dá)多目標(biāo)跟蹤時間能量資源管理方法研究
2020-05-08 03:15:12史小斌高青松
火控雷達(dá)技術(shù) 2020年1期
孟 寧 史小斌 高青松 連 豪
(西安電子工程研究所 西安 710100)
0 引言
認(rèn)知雷達(dá)的概念最早是由加拿大McMaster大學(xué)Simon Haykin教授于2006年提出,其組成框圖如圖1所示。認(rèn)知雷達(dá)具備對環(huán)境(地理環(huán)境和干擾環(huán)境)和目標(biāo)信息在線感知、分析、記憶能力,結(jié)合三維數(shù)字地形、地表分類信息、地面路網(wǎng)信息等先驗知識,在雷達(dá)發(fā)射端可以實(shí)時優(yōu)化雷達(dá)工作方式和發(fā)射波形,從而達(dá)到和目標(biāo)及環(huán)境的最佳匹配,在雷達(dá)接收端充分利用先驗信息獲得更好的雜波干擾抑制和目標(biāo)檢測性能。不難得到,認(rèn)知雷達(dá)需要具備的要素有:一是感知環(huán)境的能力;二是存儲器和知識數(shù)據(jù)庫;三是在線學(xué)習(xí)和知識運(yùn)用的能力;四是從接收機(jī)到發(fā)射機(jī)的閉環(huán)反饋[1-4]。
從圖1可以看出,認(rèn)知雷達(dá)和傳統(tǒng)雷達(dá)的主要不同之處在于傳統(tǒng)雷達(dá)在發(fā)射端沒有利用雷達(dá)接收到的信息,因此它的發(fā)射波形不會發(fā)生改變;而在認(rèn)知雷達(dá)中存在閉環(huán)反饋結(jié)構(gòu),雷達(dá)接收機(jī)接收到的信息會作用于發(fā)射機(jī)不斷調(diào)整發(fā)射波形,使得雷達(dá)的發(fā)射信號和環(huán)境信息實(shí)現(xiàn)最佳匹配。
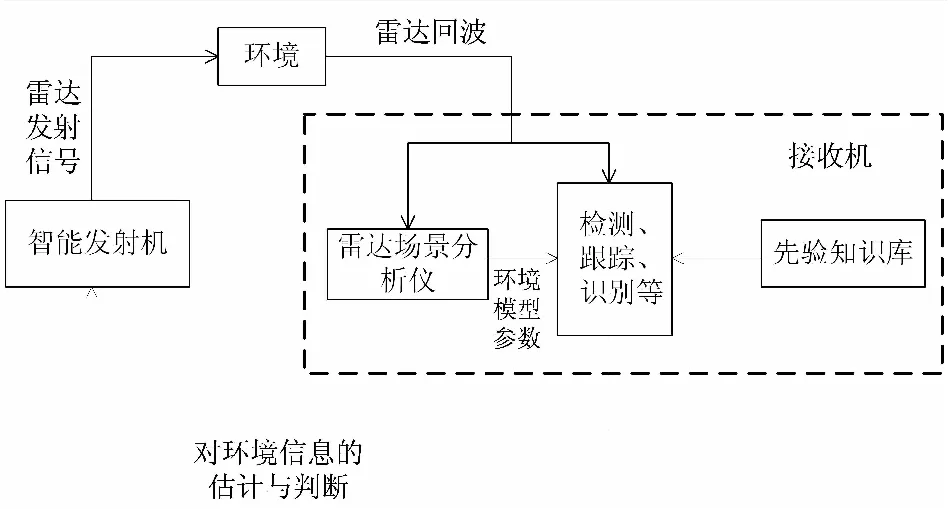
圖1 認(rèn)知雷達(dá)閉環(huán)反饋結(jié)構(gòu)框圖
時間能量資源管理是認(rèn)知雷達(dá)設(shè)計過程中的重要一環(huán),調(diào)度準(zhǔn)則對雷達(dá)系統(tǒng)性能發(fā)揮起到關(guān)鍵和決定作用。在同一環(huán)境下進(jìn)行工作,采用不同的時間能量調(diào)度策略,雷達(dá)系統(tǒng)的性能差異會很大。認(rèn)知雷達(dá)需要具備能夠根據(jù)作戰(zhàn)任務(wù)、先驗信息、環(huán)境感知結(jié)果,在測量獲取距離、速度、加速度、目標(biāo)類型等參數(shù)的基礎(chǔ)上,充分利用先驗信息,跟蹤過程進(jìn)行自適應(yīng)參數(shù)(波形、脈沖重復(fù)頻率、積累點(diǎn)數(shù)等)調(diào)度和優(yōu)化。
認(rèn)知雷達(dá)中,能量資源和時間資源高度耦合,且具有很強(qiáng)的非線性關(guān)系,對其進(jìn)行優(yōu)化配置具有很大難度。實(shí)現(xiàn)實(shí)時的時間能量資源管理技術(shù)是需要研究的另一項關(guān)鍵技術(shù)。
1 基于MIMO的認(rèn)知雷達(dá)多目標(biāo)跟蹤分析
多目標(biāo)跟蹤一直是軍事領(lǐng)域研究中的一個重要課題,同時也是目前的難點(diǎn)問題。認(rèn)知雷達(dá)采用MIMO(Multiple-Input Multiple-Output)技術(shù),通過多波束工作模式,可以對多個目標(biāo)進(jìn)行實(shí)時跟蹤。MIMO技術(shù)能夠?qū)崿F(xiàn)同時發(fā)射多個信號波形。在理想情況下,要求這些波形之間不能夠互相影響,但是在實(shí)際中這些雷達(dá)波形互不產(chǎn)生影響幾乎不可能。盡量使得雷達(dá)信號之間接近于相互正交,不僅強(qiáng)調(diào)雷達(dá)信號之間互相關(guān)要很弱,而且還隱含了雷達(dá)信號自身擁有很低的自相關(guān)旁瓣。
在實(shí)際工程應(yīng)用中,MIMO技術(shù)雷達(dá)要求設(shè)計人員考慮下面因素:
1)每個時刻,雷達(dá)最多可以產(chǎn)生的波束個數(shù)有限。由于受到MIMO技術(shù)雷達(dá)發(fā)射陣元數(shù)目N的約束(即自由度約束),每個時刻雷達(dá)最多能夠同時產(chǎn)生出M(M≤N)個正交的雷達(dá)波束。
2)雷達(dá)的多個波束發(fā)射功率之和有限[5-6]。在理論上,雷達(dá)每個波束的發(fā)射功率越大,雷達(dá)對每個目標(biāo)的跟蹤效果越好。
隨著雷達(dá)波束脈沖寬度的逐漸增加,系統(tǒng)的發(fā)射總功率會慢慢增大。為了確保某一時刻雷達(dá)系統(tǒng)的發(fā)射總功率不會超過硬件的最大承受范圍,要求約束多波束的總發(fā)射功率。傳統(tǒng)的多波束工作模式均未利用跟蹤器提供的反饋信息,這樣就沒有充分利用雷達(dá)系統(tǒng)有限的資源。在雷達(dá)工作時,通常將發(fā)射波束的脈沖寬度設(shè)定成一個常數(shù)。該方法比較簡單,且工程上易于實(shí)現(xiàn),但卻不能獲得最優(yōu)的多目標(biāo)跟蹤性能[7]。
認(rèn)知技術(shù)能夠根據(jù)目標(biāo)和環(huán)境的特點(diǎn)自適應(yīng)地選擇雷達(dá)發(fā)射機(jī)配置,并可以利用各種先驗信息如目標(biāo)和雷達(dá)距離、雷達(dá)截面積等,來提高對目標(biāo)的跟蹤性能。因此,考慮利用認(rèn)知技術(shù)來提升MIMO雷達(dá)有限資源的利用效率,根據(jù)系統(tǒng)反饋的目標(biāo)信息設(shè)置下一時刻波束的脈沖寬度、數(shù)目、等參數(shù),如圖2所示。
2 基于MIMO的認(rèn)知雷達(dá)跟蹤時間資源管理方法研究
不同任務(wù)對雷達(dá)系統(tǒng)的時間資源需求不同,同一任務(wù)在不同的環(huán)境中所消耗的時間能量資源也不同,傳統(tǒng)的資源管理僅針對雷達(dá)系統(tǒng)自身的資源進(jìn)行優(yōu)化,沒有利用環(huán)境和目標(biāo)信息,認(rèn)知雷達(dá)需要控制資源管理器,突破傳統(tǒng)的資源調(diào)度方式,盡可能地利用環(huán)境和目標(biāo)實(shí)時動態(tài)信息,將環(huán)境、目標(biāo)與雷達(dá)構(gòu)成動態(tài)系統(tǒng),對資源分配的結(jié)果進(jìn)行實(shí)時評估,形成基于認(rèn)知的閉環(huán)調(diào)度算法[8-9]。
基于認(rèn)知的自適應(yīng)資源調(diào)度管理策略,根據(jù)環(huán)境信息庫提供的實(shí)時動態(tài)信息(威脅等級、目標(biāo)類型、截面積、目標(biāo)位置、電磁干擾情況、雜波等)和外部指令,自適應(yīng)地控制雷達(dá)系統(tǒng)的波束形狀、工作頻率、駐留時間、波束指向、工作波形和信號處理方式等,以達(dá)到空域、時域、頻域和能量的最優(yōu)利用。
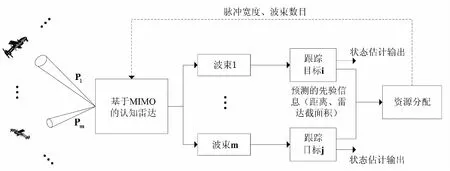
圖2 基于MIMO的認(rèn)知雷達(dá)資源管理框圖
以雷達(dá)在掃描加跟蹤(Track and Search, TAS)體制下工作,根據(jù)搜索獲取的目標(biāo)距離信息,按照精細(xì)化的設(shè)計方式,將0.35倍、0.5倍、0.7倍、0.86倍到1倍最大威力的距離區(qū)間內(nèi)的目標(biāo)進(jìn)行劃分,如圖3所示。針對不同距離區(qū)間范圍內(nèi)的目標(biāo)采用不同的時間能量資源管理策略,實(shí)現(xiàn)認(rèn)知雷達(dá)性能優(yōu)化的目的。在認(rèn)知雷達(dá)近距離范圍內(nèi)采用均分脈沖寬度的策略,主要有將脈沖寬度4等分(見圖4)、2等分等分配方式,形成多個正交波束,同時照射不同跟蹤目標(biāo),充分利用雷達(dá)能量優(yōu)勢,可以降低目標(biāo)的跟蹤時間,節(jié)省認(rèn)知雷達(dá)的時間資源開支。
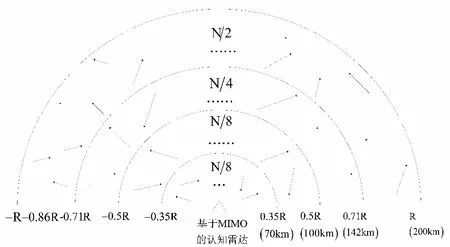
圖3 跟蹤目標(biāo)在不同距離區(qū)間上的分布
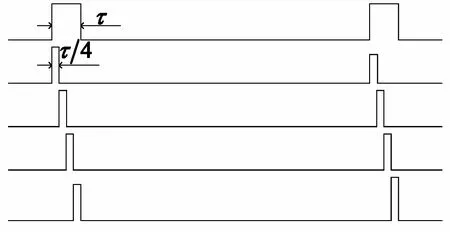
圖4 發(fā)射脈沖寬度四等分
3 仿真分析
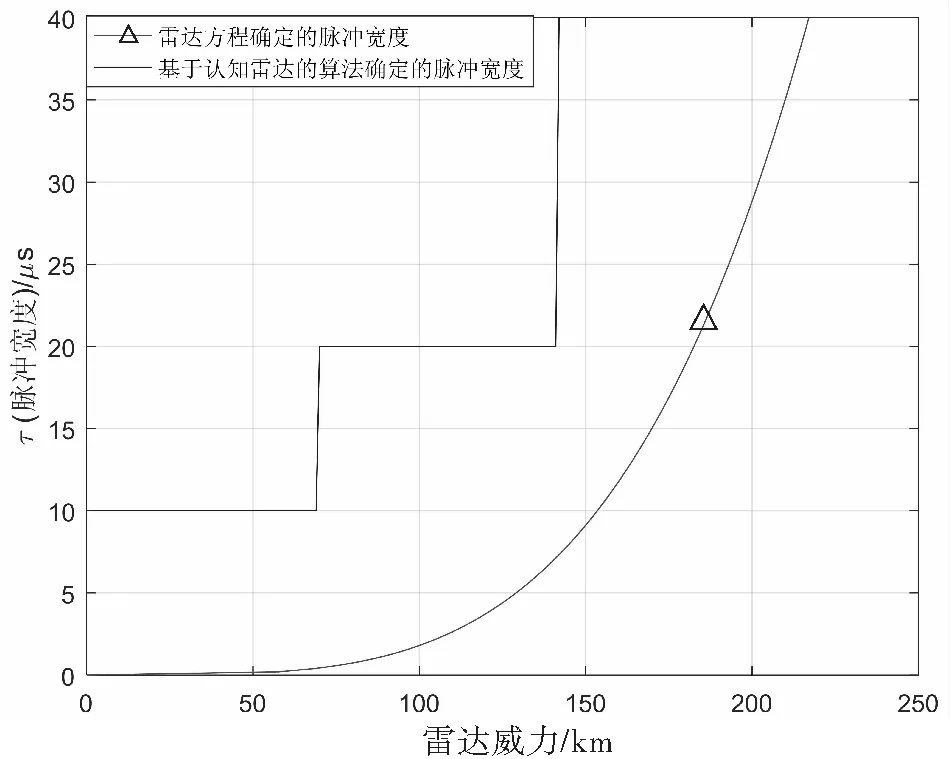
圖5 基于MIMO的認(rèn)知雷達(dá)脈沖寬度圖
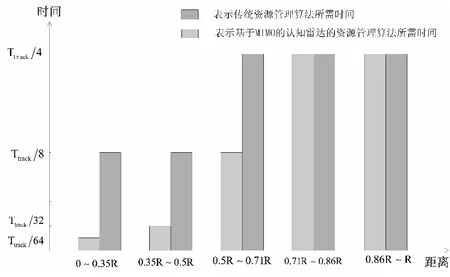
圖6 雷達(dá)跟蹤目標(biāo)所需時間比較圖
4 結(jié)束語
本文針對認(rèn)知雷達(dá)多目標(biāo)跟蹤的應(yīng)用場景,提出了一種分割脈沖寬度的時間能量資源管理算法,目的是針對雷達(dá)有限的時間資源,進(jìn)行合理的管理,進(jìn)而盡可能地節(jié)約時間能量資源。通過仿真實(shí)驗表明,在滿足目標(biāo)跟蹤精度要求前提下,相對于傳統(tǒng)時間資源分配方法,本文的方法能夠有效地節(jié)約時間資源,具有重要的意義。
猜你喜歡
江蘇安全生產(chǎn)(2023年1期)2023-02-08 05:58:38
吉林廣播電視大學(xué)學(xué)報(2021年4期)2022-01-14 02:35:48
作文成功之路·小學(xué)版(2020年5期)2020-06-11 12:48:26
小天使·一年級語數(shù)英綜合(2018年11期)2018-11-23 09:47:26
中華手工(2017年2期)2017-06-06 23:00:31
資源再生(2017年3期)2017-06-01 12:20:59
中外會展(2014年4期)2014-11-27 07:46:46
職場(2009年4期)2009-01-01 00:00:00
建筑創(chuàng)作(2001年3期)2001-08-22 18:48:14
祝您健康(1987年3期)1987-12-30 09:52:32
