室內未知環境下動態障礙物定位研究
2020-05-09 13:40:27尹皓王利利
現代商貿工業 2020年8期
尹皓 王利利

摘 要:針對室內未知環境下的動態障礙物定位,提出了一種基于形態學濾波與混合高斯模型的Background Subtractor MOG2算法相結合的動態障礙物定位,并通過一種以針孔模型為原理的視覺測距模型方法,計算出圖像坐標與世界坐標的幾何關系,繪制了一定比例的局部地圖,通過對環境以及障礙物的真實位置與構建的局部地圖對比試驗,驗證了采用此方法對動態障礙物定位的準確性。
關鍵詞:室內未知環境;視覺;動態障礙物定位;局部地圖構建
中圖分類號:TB ? ? 文獻標識碼:A ? ? ?doi:10.19311/j.cnki.1672-3198.2020.08.101
0 引言
室內未知環境下障礙物的定位一直是室內移動機器人環境感知能力研究的熱門,因攝像頭成本較低,市場接受度較高,其本身擁有其他傳感器沒有的大視野,在實用上視覺技術使用方法靈活,可根據應用場景的選擇不同的測量方法,而且質量輕,適用于任意的機器人實物平臺,所以視覺定位在目前機器人定位領域上占據很重要的位置。但攝像頭因接受的環境信息量大,需要處理的環境噪音復雜多變,且障礙物種類和情況多變,傳統的靜態障礙物檢測算法很難精確定位動態障礙物的位置。近年來,對于視覺定位應用在障礙物的定位問題,鄭爭光提出了自適應閾值法對環境圖像分割等。但此類方法某些光噪音干擾過大的場景不能很好的分割,而且對動態物體的檢測效果很差,為下一步的地圖構建的誤差埋下伏筆。文獻基于高斯混合模型的多車道車流量檢測算法能檢測出動態的車輛,且魯棒性好實用性強。受其啟發,本文針對環境噪音做了處理,以及使用一種基于混合高斯模型去除背景法優化的算法(視頻背景去除建模Background Subtractor MOG2)來尋找攝像頭中的動態障礙物,并對圖像中障礙物信息標注,利用小孔成像原理測量出障礙物距離與機器人之間的距離,并根據測量出比率指標計算障礙物尺寸,最后根據得到的數據構建環境地圖。本文方法處理后的消除環境噪音產生的影響,生成的動態障礙物輪廓清晰,局部地圖構建誤差較小并能預判移動方向。此方法能夠滿足室內動態障礙物檢測與地圖構建需要的精度,為以后的室內障礙物檢測精度的分析提供了依據。
1 基于Background Subtractor MOG2的動態障礙物識別與定位
1.1 動態障礙物及其輪廓檢測
攝像頭接受了大量的環境信息,但并不是所有環境信息對障礙物的定位都是有效的。因此需要對圖像作預處理,提升圖片對比度并降低圖像噪音,消除無用的環境信息,提高有用的信息比例。主要方法為圖像濾波,圖像的膨脹和腐蝕。首先,對視像頭每一幀的圖像進行灰度化(圖2),這樣減少了由RGB三通道變為單通道,不失環境細節,且減輕了運算負擔。其次,對圖像進行中值濾波操作(圖3),目的是消除孤立點,并去除脈沖噪聲和椒鹽噪聲,提高特征抽取和識別的可靠性。
目標圖像經過濾波處理后,采用Background Subtractor MOG2算法。Background Subtractor MOG2算法是以高斯混合模型為基礎的背景/前景分割算法。相比于其他的物體識別定位算法,這個算法的特點是它為每個像素選擇一個合適數目的高斯分布。這樣就會對亮光等發生變化引起的場景變化產生更好的適應。在實際應用此算法時選擇檢測陰影,這樣就不會應為物體或燈光的陰影而影響檢測結果,大大的減少了外界環境的干擾。有別于其他文獻中閾值分割的障礙物檢測方法,在尋找障礙物時采用這種算法可以在移動機器人移動時檢測到障礙物,且能在一定光線的照射下較為準確地識別障礙物在相機坐標中的位置,增強了移動機器人在室內環境下的適應能力,識別運動中的物體(圖4)。
在不影響障礙物總的位置和形狀的前提下,為了除去孤立的小點,毛刺和小橋,目的是防止地面上的紋理以及地面上細小的反射物帶來的影響,通過形態學運算(圖5),先進行腐蝕操作,再進行膨脹操作。第二次進行膨脹消去障礙物圖中的黑色點,第二次進行腐蝕維持障礙物形狀(圖6)。對處理后的圖像的輪廓進行尋找,找到輪廓后對輪廓內的像素點通過凸包檢測(圖7)可以包住輪廓點集中的所有點,避免因沒有識別到障礙物突起的形狀造成局部地圖構建的誤差,對機器人的正常行駛造成干擾。再次對凸包點集中做生成最小外接矩形(圖8),得到處理后的中心,以及長、寬,以中心為障礙物中心點。且在源圖像中畫出最小外接矩形,判斷識別誤差,方便給出局部地圖構建時的誤差。
2 矯正方向及局部地圖構建
在實際場景中圖像與視覺場景中移動方向相反,通過對圖像水平左右調換實現位置移動方向的一致性。因為攝像頭采集到的是二維環境信息。因此,為了實現路徑的規劃,構建局部地圖,因此建立一個X,Y軸的直角坐標系,所得到的障礙物的長寬為x,y為了計算方便,在X正半軸繪制世界坐標系下相機坐標下的局部地圖。
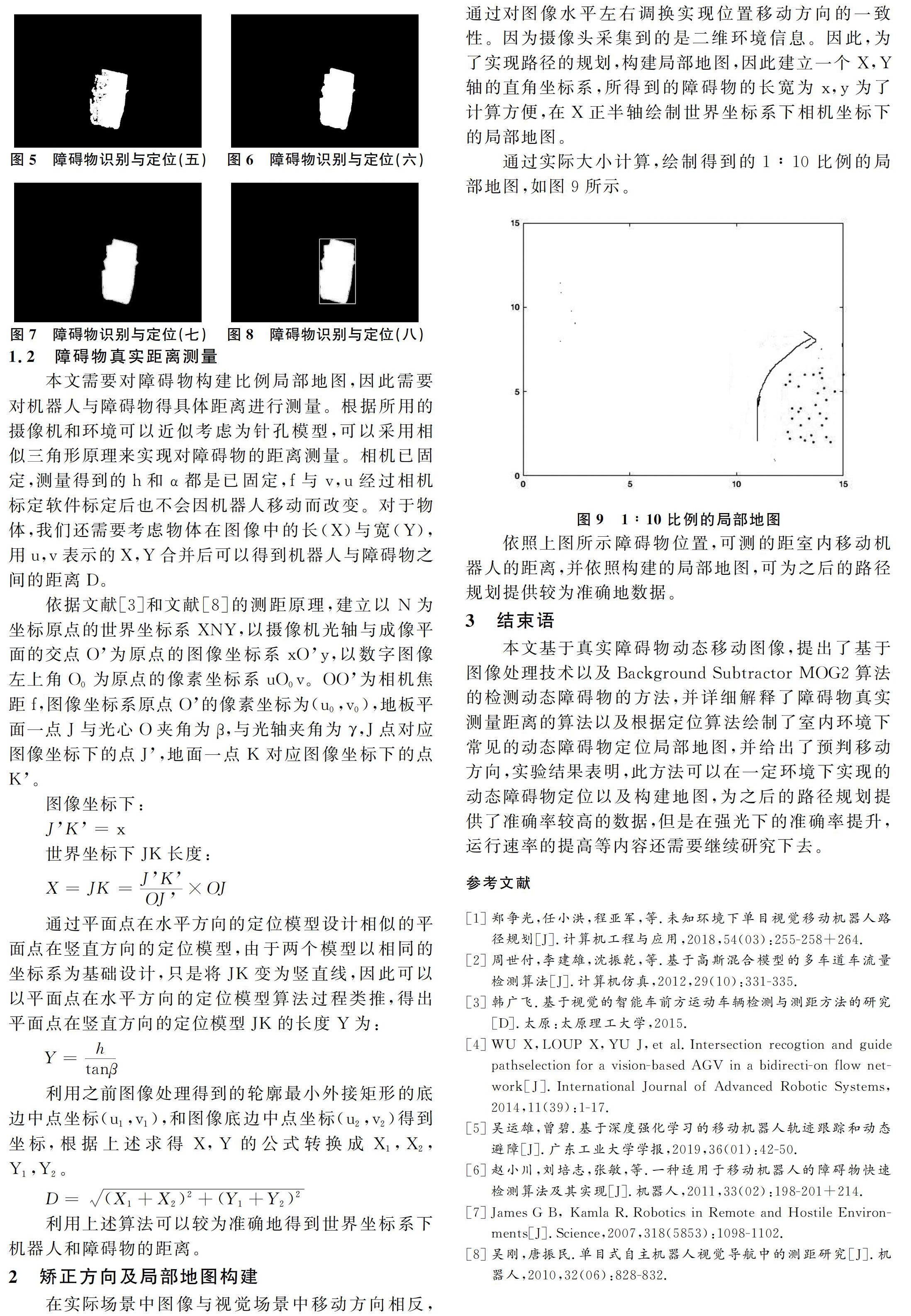
通過實際大小計算,繪制得到的1∶10比例的局部地圖,如圖9所示。
依照上圖所示障礙物位置,可測的距室內移動機器人的距離,并依照構建的局部地圖,可為之后的路徑規劃提供較為準確地數據。
3 結束語
本文基于真實障礙物動態移動圖像,提出了基于圖像處理技術以及Background Subtractor MOG2算法的檢測動態障礙物的方法,并詳細解釋了障礙物真實測量距離的算法以及根據定位算法繪制了室內環境下常見的動態障礙物定位局部地圖,并給出了預判移動方向,實驗結果表明,此方法可以在一定環境下實現的動態障礙物定位以及構建地圖,為之后的路徑規劃提供了準確率較高的數據,但是在強光下的準確率提升,運行速率的提高等內容還需要繼續研究下去。
參考文獻
[1]鄭爭光,任小洪,程亞軍,等.未知環境下單目視覺移動機器人路徑規劃[J].計算機工程與應用,2018,54(03):255-258+264.
[2]周世付,李建雄,沈振乾,等.基于高斯混合模型的多車道車流量檢測算法[J].計算機仿真,2012,29(10):331-335.
[3]韓廣飛.基于視覺的智能車前方運動車輛檢測與測距方法的研究[D].太原:太原理工大學,2015.
[4]WU X,LOUP X,YU J,et al.Intersection recogtion and guide pathselection for a vision-based AGV in a bidirecti-on flow network[J].International Journal of Advanced Robotic Systems,2014,11(39):1-17.
[5]吳運雄,曾碧.基于深度強化學習的移動機器人軌跡跟蹤和動態避障[J].廣東工業大學學報,2019,36(01):42-50.
[6]趙小川,劉培志,張敏,等.一種適用于移動機器人的障礙物快速檢測算法及其實現[J].機器人,2011,33(02):198-201+214.
[7]James G B, Kamla R.Robotics in Remote and Hostile Environments[J].Science,2007,318(5853):1098-1102.
[8]吳剛,唐振民.單目式自主機器人視覺導航中的測距研究[J].機器人,2010,32(06):828-832.
