大口徑大視場望遠鏡探測器平面度檢測方法綜述
2020-05-12 00:51:22郭寧馨張景旭劉昌華安其昌
激光與紅外 2020年4期
郭寧馨,張景旭,劉昌華,陳 濤,安其昌,明 名
(中國科學院長春光學精密機械與物理研究所,吉林 長春 130033)
1 引 言
望遠鏡是天文觀測的重要工具,其分辨能力決定著人們可觀測到的宇宙空間的大小。望遠鏡從誕生至今已經經歷了400余年的發展歷史,口徑由厘米級擴大到米級,用途也由純天文觀測發展成對地球外層空間人造目標的普查編目、監視定軌及成像識別[1]。
由光學系統可知,相機的焦平面靶面面積與望遠鏡光學系統的視場角和焦距有關,如式(1)所示。
SCCD=2ftan(ω/2)
(1)
式中,f為光學系統焦距;ω是光學系統的視場角。
傳統光學元件和系統的分辨率一直被認為滿足經典瑞利準則[2]。現有單片CCD受半導體材料和制造工藝水平的限制,面積大小不能滿足大視場的要求,若想在短期內開發出集成度更高、像元數更高的CCD器件也是非常困難的,所以拼接CCD成為大口徑大視場望遠鏡相機光學系統設計的重點。
成像光學系統是外界被照明物體(或發光物體)所發出的球面波集合通過透鏡系統后,在系統的理想平面上獲得清晰的像,這一平面叫做光學系統的焦平面。由于實際光學系統經像差矯正后,除在理想焦平面上獲得清晰的像外,常把理想波面的參考點沿軸向離焦,使波差不超過λ/2時也能得到清晰的像則所對應的離焦量稱作焦深,如式(2)所示。
(2)
式中,λ為入射光波長;f為光學系統焦距;D為光學系統入射光瞳直徑;f/D為光學系統的F#數。
在焦深范圍內,成像質量仍然能滿足光學系統性能需求。光學系統成像原理圖如圖1。
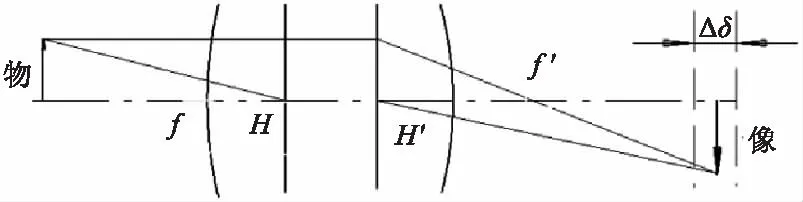
圖1 光學系統成像原理圖Fig.1 Optics system imaging elements
由此可知對于給定的光學系統,CCD 靶面傾角誤差應嚴格地限制在焦深范圍,否則將使部分靶面脫離光學系統像面,在光學系統視場范圍內使得圖像有虛有實,達不到系統的使用要求[3]。
因此,焦平面靶面拼接后的對平面度要求一般需要達到20~30 μm,實際上,這是一個十分具有挑戰性的要求。在誤差分配環節,有很多因素影響大口徑大視場望遠鏡焦平面上的靶面達到微米級別的平面度控制。這些影響因素主要包括各個獨立組件之間的集成組裝,以及隨著時間漸變的表面精度,最后的設計和裝配方案是要在充分考慮分析仿真以及實驗測試的基礎上才能得出。因此,在集成組裝的過程中需要多次測量平面度,根據結果進行多次微調和分析,才能得到滿足要求的拼接靶面。
2 靶面拼接平面度測量要求
對于單個CCD的測量側重于對CCD性能的檢驗,單塊CCD的平面度要求達到10 μm左右,干涉儀具有納米級的分辮率和精度,能夠滿足測量目的。拼接后CCD的測量側重于對整體靶面平面度的檢驗和裝調,平面度要求在室溫下達到20 μm左右,CCD拼接后產生的拼縫會影響測量結果,不能選用干涉儀測量。工作狀態CCD的測量需要透過窗口,對于儀器要求有一定的測量距離(比如HSC的窗口的厚度 37 mm,CCD到窗口的距離5 mm[4]),平面度要求拼接CCD在冷卻和真空環境下達到30 μm左右。這限制了測量 CCD的各種可能技術平面度,要保證測量方法和 測量結果不能受到窗口和測量距離的影響。
因此,靶面拼接平面度測量的需求主要有三種,首先是單個CCD芯片的平面度檢測,用于檢驗;其次是多個CCD拼接過程中的檢測,用于裝調;最后是拼接CCD冷卻后,透過低溫杜瓦的窗口檢測,測量結果不能受到窗口的影響。
3 CCD平面度檢測現有技術
3.1 目測法[5]
歐洲南方天文臺(ESO)采用了一種非常簡單的方法來測量CCD。肉眼觀察千分表在CCD表面測量的顯微鏡物鏡的位移,在x-y坐標系上精確移動CCD,并在被測CCD上的多個位置重復測量目標之間的高低差、角度以及偏移量。
由于顯微鏡鏡頭到CCD距離較近,這種方法無法測量前面設置有窗口的CCD。這就給CCD帶來了環境粉塵污染和測量過程中意外損壞的風險。同時這種方法還需要有經驗的人執行測量,以實現可重復的結果,所有的定位、對焦、記錄等步驟都必須手工完成,測量過程非常耗時。
3.2 激光與相機探測系統[5]
加州大學和利克天文臺采用了更自動化和先進的測量系統。他們將激光束投射到CCD的表面,并檢測由于CCD傾斜而產生的光束偏轉。圖2描述了系統的幾何形狀。
該系統由一個激光器、一個放置CCD的X-Y平移臺、兩個反射鏡和一個用于探測反射激光束位置的照相機組成。激光束由第一面鏡子定向到被測表面上,然后從CCD表面反射到第二個鏡子引導光束到相機探測系統。如果移動被測CCD,其表面的局部坡度發生變化,相機就會記錄下光點的移動。通過掃描整個表面和記錄光電運動,可以重建CCD的表面特征。
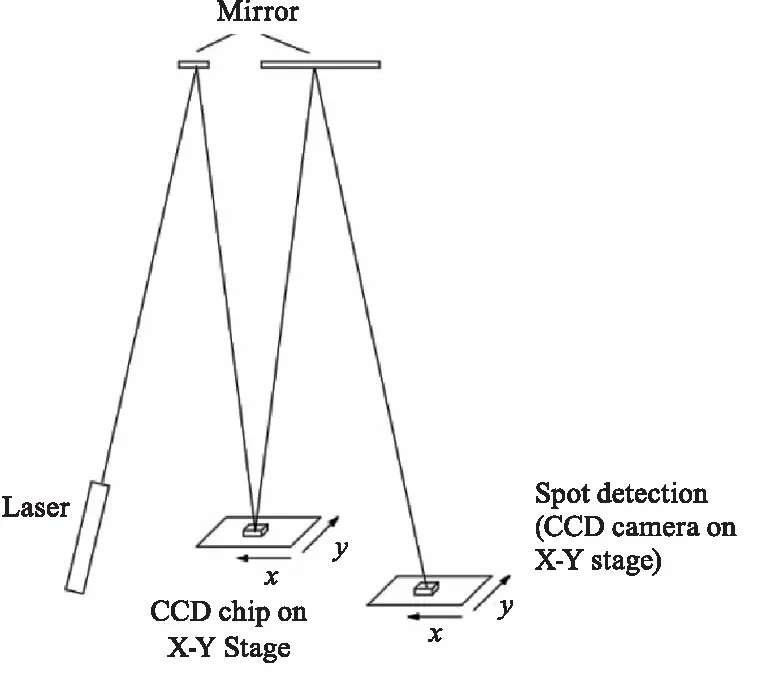
圖2 加州大學/利克天文臺用于CCD平面度測量的裝置示意圖[5]Fig.2 Diagram of the set up used for CCD flatness measurements used at the Lick Observatory and University of California
用這種方法測量物體表面特征的初始條件是物體的表面必須是連續的,所以不能用來測量拼接CCD之間的高度差。而且還要求CCD的反射光束不能模糊,如果相機上的光點變得模糊,就很難準確的定位。
3.3 基于哈特曼掩模的測量方法[5]
格林威治天文臺(RGO)開發了一個基于哈特曼掩模的程序。在該系統中,光透過一個透鏡和位于光軸上帶有兩個孔的掩模,將兩個收斂光束錐投射到一個有源CCD上。如果探測器恰好位于投影系統的焦平面上,那么CCD圖像中只有一個點;如果探測器在焦平面外,輸出的圖像中就有兩個點,兩個點之間的距離與探測器表面到焦平面的偏差成正比。為了得到CCD的表面特征,需要在一次曝光時掃描整個表面,并檢測圖像中的點位置,從而得到位置上的偏移量。
這一過程可以測量探測器表面高度差,測量表面是否連續不影響結果。因此,利用該系統可以對多個CCD的拼接平整度進行測量。圖3為RGO測量方法光學原理圖。
這種技術的缺點是CCD必須是處于接通電源以及冷卻狀態的,并且冷卻需要很長時間,這大大延長了校正周期所需的時間,包括測量地形、校正傾斜度以及再次測量。所以需要很長的測量周期,此外,它還無法測量機械樣品。
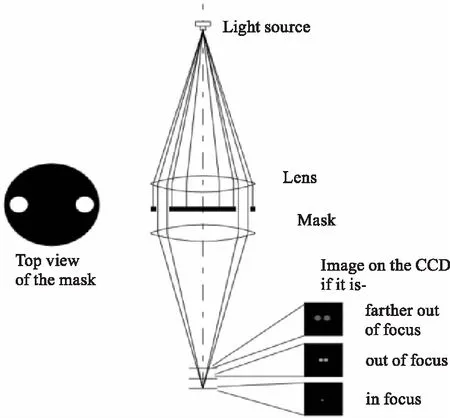
圖3 RGO測量方法光學原理圖[5]Fig.3 Optical schematic for the technique used by RGO for flatness measurement of CCDs
3.4 干涉儀測量法
干涉法是最常用的光學表面形貌測量方法。干涉測量是一種基于光波疊加原理,分析處理干涉場中亮暗變化、條紋形狀變化或其他條紋數的變化,從中獲取被測量的有關信息。
通過在干涉儀的一支光路中引入被測量,干涉儀的光程差就會發生變化,干涉條紋也會隨之變化,這時可測量出干涉條紋的變化量,就可以獲得與介質折射率和幾何路程有關的一系列物理量和幾何量[6]。干涉儀測量原理圖如圖4所示。
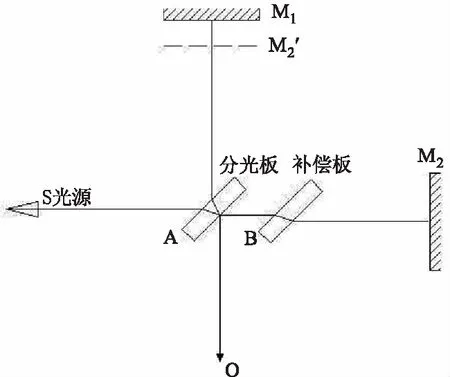
圖4 干涉儀測量原理圖[7]Fig.4 Schematic diagram of interferometer measurement
為了重建CCD的形狀,需要分析了非常窄的帶通光條紋圖,CCD之間的拼接間隙會打斷干涉條紋圖樣,這種方法無法計算拼接CCD之間的高度差,因此干涉測量法在大口徑大視場望遠鏡拼接靶面平面度測量中應用度較低。
3.5 掃描白光干涉儀
白光干涉儀是將白光分解、傳輸和疊加后,對形成的干涉條紋進行分析處理的儀器,其基本原理就是通過不同的光學元件,把白光分解成參考光路和檢測光路,然后在每束光中引入一定的光程差,最后將這些經過不同光路的光疊加起來,從而形成明暗相間的干涉條紋。白光干涉條紋的特點是中央零件條紋精確定位,據此可以為測量提供一個絕對坐標[8],實現數據的精確測量。
基于Twymann-Green干涉儀的垂直掃描白光干涉儀(如圖5所示)產生的相干光束被分束器分成參考部分和信號部分。參考部分來自一個可移動的鏡子,并與來自研究對象的信號光束疊加反射回分束器,沿著這束光即可觀察到干涉,從而得到基準平面鏡和被測表面的相對差值[9]。
當參考光路中的反射鏡以連續的速度移動時,用光電二極管或者相機檢測組合光束的強度,當路徑長度的差值大于相干長度時,則沒有發生構造干涉。當兩個長度相等時,則在光電二極管處產生相長干涉。由于反射鏡的連續運動,在光電二極管的位置上不斷形成和破壞干涉區,記錄光強的波動,同時測量反射鏡的位置。通過分析相長干涉的頻率和特性,可以更準確地測量出這段距離[9]。
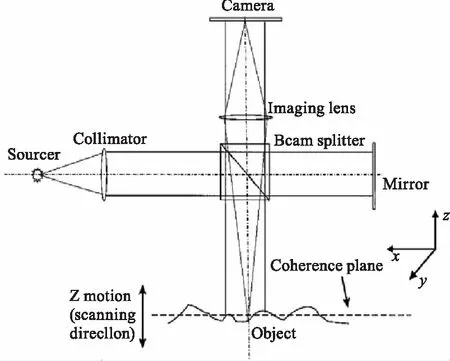
圖5 基于Twymann-Green干涉儀的垂直掃描白光干涉儀原理圖[9]Fig.5 Schematic of a vertical-scanning white-light interferometer based on a Twymann-Green interferometer
這個測量方法克服了測量窗戶后面探測器的問題。白光干涉儀的窗口反射與CCD自身信號之間的路徑長度之差大于相干長度,因此不會影響測量結果。
3.6 激光同軸位移器測量法
激光同軸位移器通常將一束光聚焦到目標上,采用輻條式光纖探針進行表面離焦檢測,檢測出物體表面是否在這個焦點上以及物體表面離焦點有多遠[10]。可安裝于龍門自動影像測量儀,基于算法以非接觸方式測量表面位置坐標和傾角,可以獲得表面形貌、表面傾角和距離,實現生產過程中尺寸和形狀的在線監測。
測量系統布置示意圖如圖6所示,傳感器系統的主要組成部分是一個像輻條一樣排列的光纖束,使用一種對于相干性或單色性沒有特殊要求的光源,這種光束通過透鏡系統對準目標并聚焦,然后以投射的方式反射回光學系統,使用分束器或光柵準直后,反射光被定向到入射光束路徑。分析光從表面反射的方式,該系統可以確定目標是否在照明光學的焦點上以及偏移量和偏移方向[10]。
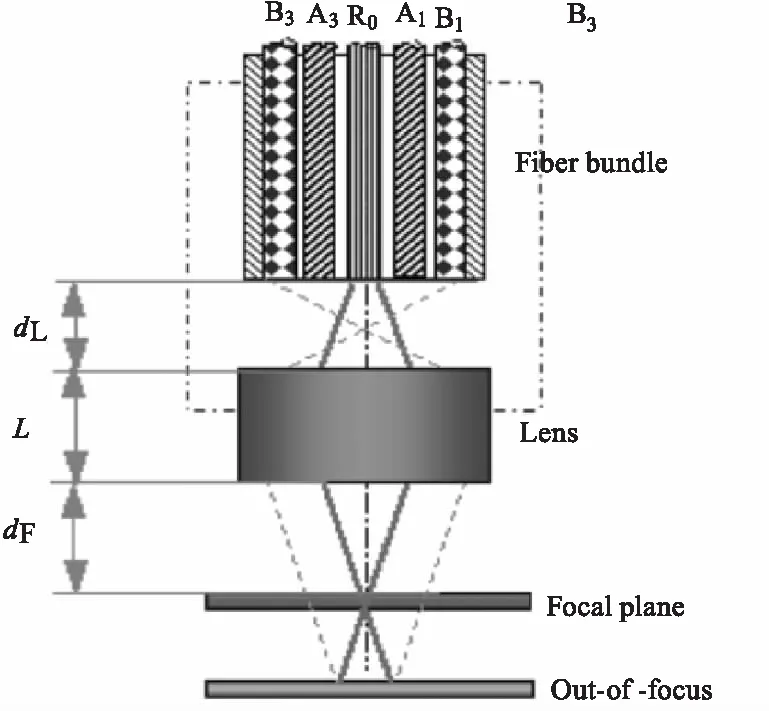
圖6 激光同軸位移器[10]Fig.6 Focus sensors measurement principle
激光同軸位移器的移動質量一般非常小,能比較快的系統掃描一個表面,可達到較高的精度、靈敏度。由于大多數對焦檢測系統只能在很小的范圍內工作,因此平穩的移動整個系統,減小機械誤差使光點始終聚焦在表面上是重點。
3.7 三角激光測量法
激光位移傳感器是采用三角法實現物體位移的非接觸測量,原理圖如圖7所示,用一束激光以某一角度聚焦在被測物體表面,然后從另一角度對物體表面上的激光光斑進行成像,物體表面激光照射點的位置不同,所接受散射或反射光線的角度也不同,用位敏探測器測出光斑像的位置,即可計算出物體表面激光照射點的位置。當物體沿激光線方向發生移動時,測量結果就將發生改變,從而實現用激光測量物體的位移[11]。
使用三角激光測量儀進行測量時,通過一維電位移平臺帶動激光位移傳感器掃描物體的表面,然后對測量的數據進行處理,進而得到物體的表面形貌。
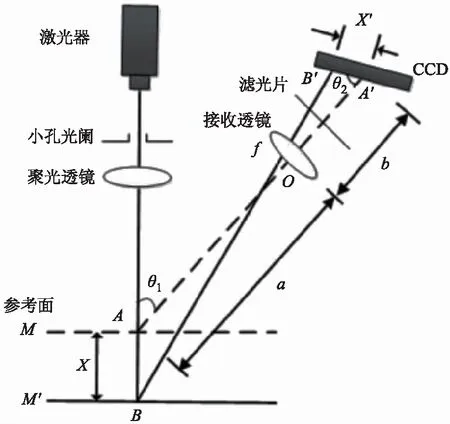
圖7 三角激光測量傳感器原理圖[12]Fig.7 Triangulation sensor used for measuring the distance to a surface with specular reflection
激光三角測量法具有相干性好,頻率單一、穩定性好等特點,測量精度取決于工作距離和測量范圍。市場上有一些設備的分辨率為0.2 μm,在整個可測量范圍內的精度約為5 μm。但是測量結果容易受到系統自身機械誤差的影響。

表1 測量儀器對比表Tab.1 Comparison table of measuring instruments
4 國際上大口徑大視場望遠鏡拼接靶面的檢測概況
目前,國際上的大口徑大視場望遠鏡對于靶面拼接的研究已經有一定成果和經驗了。望遠鏡的口徑也由之前的3~5 m級逐漸擴大到8~10 m等級,這些望遠鏡在檢測靶面平面度所用的方法也相對應有所不同。
4.1 TAOS-Ⅱ
TAOS-Ⅱ在墨西哥加利福尼亞州的國家天文臺運行三臺口徑1.3m的望遠鏡,視場 2.3°和高速CMOS成像儀照相機能夠以20Hz的讀出頻率同時監測1萬顆恒星。TAOS-Ⅱ在e2v定制了總共40個CMOS成像儀,每個CMOS芯片規格4608×1920,16 μm像素,這些設備以2×5的模式布置在冷板上,冷板的平面度要求為峰谷值相差小于20 μm,并且在裝配過程中進行了幾次調整,以確定冷板的平整度不會受到了熱循環的影響。焦平面拼接平面度要求為峰谷值相差小于30 μm[13]。
TAOS-Ⅱ靶面平面度測量選用了Keyence LK-H085的三角激光探測測量方法,其不僅應用在探測器平面度的測量過程中,還應用在了冷板的基準面的測量中[14],如圖8所示。

圖8 TAOS-Ⅱ采用基恩士LK-H085測量冷板平面度[14]Fig.8 Keyence LK-H085 measure TAOS-Ⅱ coldplate flatness
4.2 KMTNet
KMTNet望遠鏡項目由韓國天文臺和空間科學研究所(KASI)贊助,項目中用于觀測的是分別位于智利的Cerro-Tololo(CTIO),南非的Sutherland(SAAO)和澳大利亞的SSO天文臺三架口徑為1.6 m的寬視場赤道安裝望遠鏡,對星系隆起區進行連續觀測,以尋找太陽系外行星。相機焦平面由四塊的CCD290-99拼接而成,高性能CCD具有9 k×9 k格式,10 μm像素,平面度最高峰谷值可達到29 μm[15]。
KMTNet平面度測量選用了OGP Smart Scope Vantage系統,多個視場可以拼接在一起,便于自動對齊和缺陷檢測的模式識別。所有SmartScope Quest300可以配備電動10× TeleStar遠距變焦鏡頭,能夠將傳送的圖像由固態攝像機轉換為電信號,提供最高質量的圖像,精確計量優化。OGP measure remind?3D多傳感器軟件能夠實現高精度、重復性的邊緣檢測[16],如圖9所示。

圖9 使用OGP_SmartScope Vantage 300測量KMTNet拼接探測器的平面度[17]Fig.9 OGP_SmartScope Vantage 300 measure the flatness of the KMTNet focal plane
4.3 J-PAS
J-PAS項目是OAJ(Observatorio Astroflsico de Javalambre)在西班牙特魯埃爾進行的一個為期五年的巡查項目,項目中使用口徑為2.55 m大視場望遠鏡對北天區進行重子聲波振蕩(BAO)測量。該望遠鏡的相機焦平面由14塊用于成像的9 k×9 k e2v CCD290-99,8塊用于波前傳感傳輸的2 k×2 k e2v CCD44-82,4塊用于自動導引傳輸的1 k×1 k e2v CCD47-20拼接安裝在直徑約500 mm精密焦平面冷板上,拼接后靶面平面度要求為峰谷值相差小于27 μm[18],如圖10所示。
(a)CT1000測量過程
(b)放置在低溫杜瓦內的探測器
J-PAS靶面平面度測量選用了CT1000非接觸式三維測量系統,該系統通過彩色白色傳感器利用光點和光譜儀進行測量。由不同波長組成的光被投射到不同的高度,分光計分析強度與波長的關系,當分光計中某一波長的強度達到最大值時,就會產生高度讀數。Z軸移動精度可達到1.5 μm,X和Y軸移動精度可達到10 μm[18]。
4.4 VST
VST是歐洲南方天文臺(ESO)在智利的帕拉納爾天文臺(Paranal Observatory)2005年投入使用的口徑2.6m巡天望遠鏡,OmegaCAM安裝在VST的卡塞格林焦點處,焦平面由32塊15μm像元尺寸的2 k×4 k的e2v CCD44-82拼接而成,拼接后測量平面度可以達到峰谷值18 μm左右[19]。
VST平面度測量選用了Keyence的LK-H082三角激光測量探頭以及labview數據處理,在單個曲面探測器和OmegaCam拼接靶面的測量中得到了很好的應用。Keyence LK-H082可以同時測量多個表面,沒有預熱和過熱的問題,可以隔著杜瓦窗口進行即時測量。測量范圍-17.6~+14.5 mm,可以表征傾斜表面和三維曲面探測器,速度快,精度高,在76.7 mm的工作距離下提供更大的測量范圍。
內部編程的LabView 2010模塊能夠在X、Y軸機動運動的面板上校正X和Y的初始位置,實時屏幕讀出激光傳感器的Z值。激光位移傳感器由控制軟件LK-Navigator提供,用于激光三角測量傳感器的定位和調整,每一次新的測量運行前都要對反射面選擇、采樣時間、頻率和信號質量檢查進行調整。所使用的激光三角測量傳感器安裝在一個精確的X-Y-Z平移臺上,可以對下方區域進行自動掃描,在Z軸上采用手動線性平移[20],測量過程如圖11所示。

圖11 Keyence LK-H082測量過程[20]Fig.11 Keyence LK-H082 measure the flatness of the VST OmegaCAM focal plane
4.5 DES
DES與NOAO合作在塞羅-托洛洛國際天文臺(CTIO)在建造了口徑4 m的Blanco望遠鏡,用于對南部銀河系范圍5000平方度的測量。DECam是暗能量測量的主要儀器,焦平面陣列由62塊用于成像2 k×4 k CCD,12塊用于引導和聚焦2 k×2 k CCD拼接而成,CCD由勞倫斯伯克利國家實驗室(LBNL)開發。拼接后靶面平面度要求峰谷值相差小于25 μm[21]。
FNAL公司利用Micro-Epsilon公司的共焦色散位移測量系統開發了一套平面度掃描系統。該設備從鹵素燈泡中獲取光,并將其定向,使不同頻率的光聚焦在距離儀器頭部不同距離的地方。該系統可檢測到從焦點反射回來的光的頻率,并提示被照表面與儀器頭部之間的距離。線性24 mm范圍內精度約為7 μm,最大工作距離約為250 mm[22]。
測量過程中直線度的變化將直接影響測量精度,因為用于引導掃描頭的定位系統必須具有特殊的直線度,才能達到儀器的精度。所以選用了Physik的一套儀器,精度為每運行100 mm直線度1 μm,系統的運行范圍為300 mm×300 mm,不足以測量的整個相機靶面,但它能夠測量很大一部分,整個陣列的平面度可以通過少量重疊的測量部分進行映射,掃描系統如圖12所示[22]。
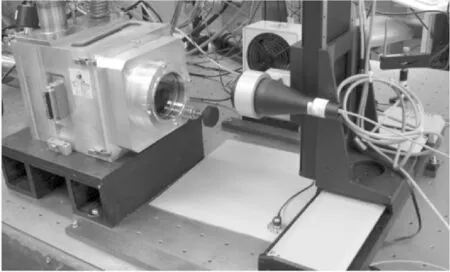
圖12 共焦彩色CCD平面度掃描系統定位于其中一個試驗臺[22]Fig.12 Scanning system is located in one of the test plane
4.6 Subaru
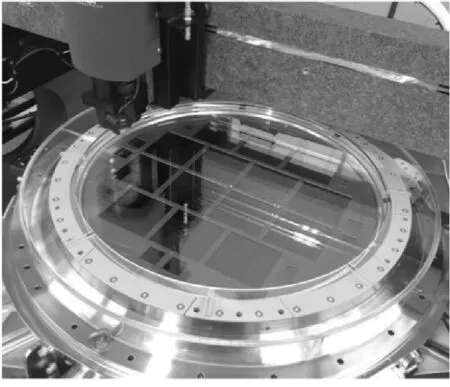
超級主焦點相機(HSC)是用于下一代主焦點形式的口徑8.3 m視場1.5°的大口徑大視場 Subaru望遠鏡的相機,HSC的大視場由116個15 μm像素的2 k×4 k全耗盡型背照式CCD組成,全工作時可覆蓋1.5°直徑視場,這些CCD由HAMAMATSU Photonics K.K和日本國立天文臺(NAOJ)研制。焦平面平面度測量后峰谷值相差小于45 μm[23]。
在室溫下用Mitaka-Koki NH3-SP高度測量系統(如圖13所示)測量了每個CCD的平面度,Mitaka-Koki NH3-SP高度測量系統是一個非接觸式3D表面高度測量系統,具有0.5 μm的測量精度。整體CCD組件測量選用了Mitaka-Koki公司的 NH-3SN型非接觸式坐標測量儀(測量精度1 μm),測量了116個CCD組件的厚度和平面度,測量結果安裝在焦平面上的所有CCD的整體平面度不超過40 μm,厚度變化在35 μm之內[24]。
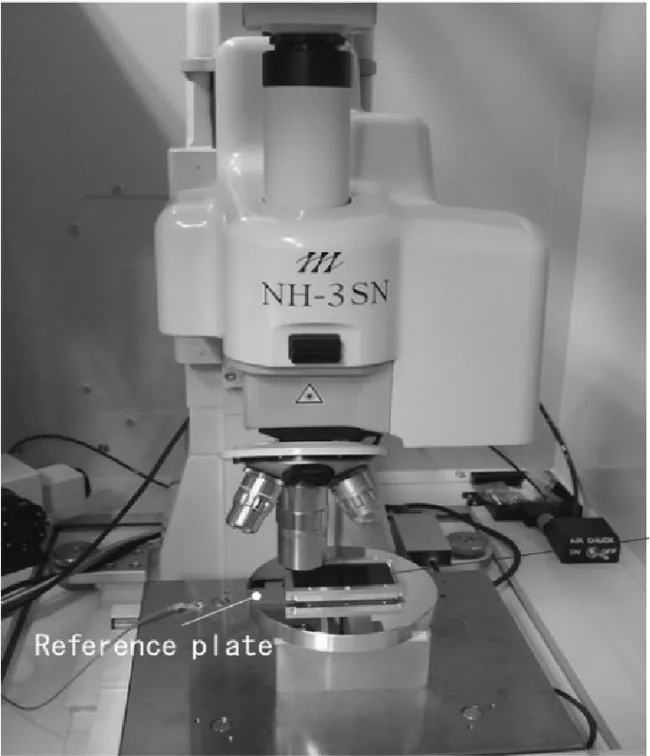
圖13 Mitaka-Koki NH3-SP高度測量系統[23]Fig.13 Mitaka-Koki NH3-SP measurement system
對于冷板的平面度測量方法,采用Mitsutoyo公司的接觸式坐標測量儀(CMM)LEGEX9100,通過測量每個CCD的安裝中心點來確認其平面度。該CMM的可測量工作范圍為1 m,直徑620 mm的冷板表面的測量精度可以達到1 μm。冷板通過三個特質墊片安裝在CMM的坐標測量儀上,這樣避免了引入的位置表面變形[24]。
4.7 LSST
LSST是由NOAO贊助,由Michael Strauss主導的大口徑大視場的地基巡天望遠鏡項目,口徑8.4 m,視場3.5°,主要對暗能量和暗物質、太陽系地圖、光學瞬變、星系天文學四個重點科學項目進行觀測。相機焦平面采用圓形靶面形式,共有189塊4 k×4 k像元尺寸10 μm的CCD組成的陣列,為了保證其正常工作,所有CCD是采用3×3的組件形式安裝于峰谷值平面度6.5 μm的基筏之上,靶面平面度要求為峰谷值相差小于10 μm[25]。
LSST的拼接CCD平面度測量采用Keyence LT-9030M三角激光共焦距離測量儀結合一套Aerotech ATS-3220開放式中心x-y高精度氣浮平臺完成,該儀器的工作原理是基于共焦顯微鏡系統和一種新穎的內部波束掃描機制,該測量方法不僅用于拼接CCD的實驗室組裝監測,也用于透過透鏡窗口玻璃進行裝配后的外部檢測。LT-9030M可達到為0.1 μm的測量精度,光學頭高度測量范圍為3 mm,與鏡頭前方的距離為30 mm。這個距離能夠通過低溫恒溫器的窗口進行測量,結合氣浮平臺掃描范圍為200 mm× 200 mm[26]。
Fisba 200 mm口徑的Twyman-Green相位測量干涉儀可以對每個傳感器進行干涉測量,以確定其平面度特性。利用Fisba干涉儀或Keyence系統,可以通過低溫恒溫器窗口對拼接罷免進行平面度監測[26]。
5 結 語
由上述可知,目前國際上大口徑大視場望遠鏡拼接靶面的平面度測量方法普遍采用三角激光測量法或者彩色激光同軸位移測量法,測量精度一般可以達到0.1~1 μm,能夠滿足拼接CCD的測量精度,并且可以滿足隔著杜瓦窗口測量工作狀態CCD的目的。
國際上,30米級口徑地基光學望遠鏡已經開始建造,而我國目前的光學望遠鏡制造水平尚駐留于4米級,與國際先進水平存在不小的差距[27]。大口徑大視場焦平面靶面拼接在國外已有多年研究,取得了許多成功的應用并積累了大量的經驗,而國內對于拼接CCD平面度的測量儀器與測量方法的研究尚處于起步探索階段,可借鑒的經驗也少,缺乏成熟的使用成果和商品化的軟件產品。可見,進行平面度高精度儀器的測量方法的研究,未來發展趨勢主要集中在以下幾個方面:
(1)提高測量焦平面CCD平面度的準確性和精確性,減少大口徑巡天望遠鏡性能的系統性錯誤。比如減小拼縫對焦平面CCD的拼接精度的影響,測量方法不受制冷和真空的條件的影響。
(2)國內大口徑大視場望遠鏡的CCD平面度測量方法需要一套完善的誤差分析系統和針對于誤差的解決方法。
(3)針對提高檢測焦平面拼接靶面平面度精度的方法,進行實驗驗證可行性,并對測量結果進行數據處理和迭代。
猜你喜歡
工業設計(2022年8期)2022-09-09 07:43:20
軍民兩用技術與產品(2021年10期)2021-03-16 06:05:30
北京測繪(2020年12期)2020-12-29 01:33:58
裝備制造技術(2019年12期)2019-12-25 03:06:46
中學生數理化·八年級物理人教版(2019年9期)2019-11-25 07:33:02
中國洗滌用品工業(2019年4期)2019-05-11 09:27:34
中學生數理化·八年級物理人教版(2019年3期)2019-04-25 06:20:54
中學生數理化·八年級物理人教版(2018年3期)2018-05-31 08:52:45
數學小靈通(1-2年級)(2017年10期)2017-11-08 08:39:45
家庭影院技術(2017年9期)2017-09-26 03:41:45
