基于FBG陣列的滑動探測系統設計
2020-05-12 00:51:30王景芝
激光與紅外 2020年4期
關鍵詞:方向
王景芝
(吉林工業職業技術學院電氣與信息技術學院,吉林 132013)
1 引 言
在工業應用中常常會出現需要通過機械手、機械臂對物體進行夾持的狀態,在物體上的施力大小需要進行合理控制,過大容易對物體造成損傷,過小會導致物體滑動,除此之外,有些應用還需要對物體滑動程度進行監測[1-2]。故研究對滑動狀態具有監測能力的傳感系統具有重要意義。
可實現此類控制的傳感器大致分為:壓電型、電容傳感型和光波導型[3-5]。Kosaka等[6]人采用壓電傳感器陣列實現了約4 cm×4 cm×3 mm區域的滑動傳感,但其內部電路排布復雜、成本高,且容易損壞,限制了其廣泛應用。Xu等人[7]利用電容傳感器實現了滑動檢測的方位識別,雖然該系統靈敏度及空間分辨率較高,但易受干擾穩定性差。Yuan等[8]人曾提出采用光纖滑動傳感的方式完成對二維旋轉平面鏡的控制,但受當時的工藝能力限制,很難標準化。由此可見,光纖傳感技術在柔性探測、密集排布以及抗干擾性等方面的優勢令其在滑動狀態探測領域具有特殊優勢。
光纖傳感器本身具有體積小、柔性好、抗干擾性好、無源等[9-11]特點,在實現滑動傳感方面具有一定優勢,這也與目前滑動傳感系統向小型化、集成化的發展方向不謀而合。其中,光纖布拉格光柵(FBG,fiber Bragg grating)[12-16]由于其在光纖上刻柵使回波信號強度大幅提升,更加適用于微弱信號的探測與識別,故基于FBG陣列的區域傳感單元應運而生,本文就是基于FBG陣列實現物體滑動狀態的實時監測,利用滑動導致物體內部剪切力改變從而分析其狀態的。
2 系統設計
2.1 基本原理
當溫度恒定時,FBG加工完成后其折射率、光柵周期均為常數,則其回波的中心波長僅受應變的影響,當FBG僅受軸向應變εz時,其波長偏移量有
ΔλB=(1-Pe)εzλB
(1)
其中,λB是FBG回波的中心波長;ΔλB是波長偏移量;Pe是應變與光的有效相應系數;εz是z軸向微應變量。
為了描述當物體在表面被滑動時的剪切力分布,給出了承載面及FBG的受力示意圖,如圖1所示。
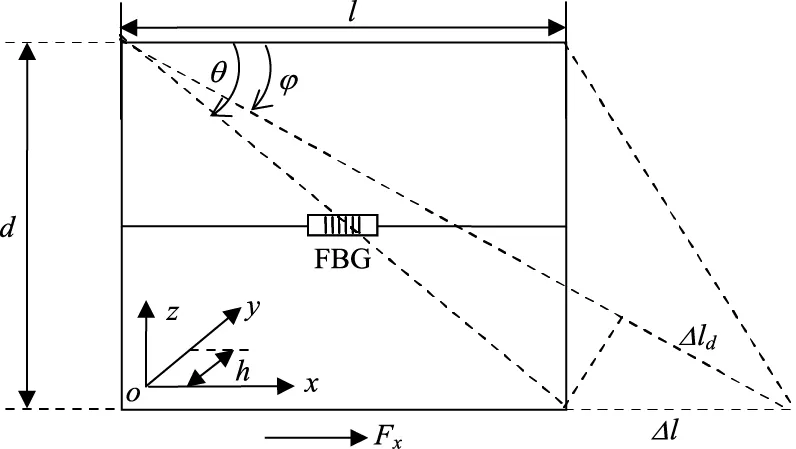
圖1 傳感模塊結構Fig.1 Structure of sensor module
設x軸方向剪切力為Fx,傳感單元有效長度為l,寬度d和高度h。FBG與被測物體之前不發生打滑現象,則剪切應變量以施力和變形方式的表達有:
(2)
其中,Δl表示在x軸方向的延長率,剪切模量G可以表示為:
(3)
其中,Em為材料楊氏模量;vm為其泊松比。設x軸方向Fx與Δl的比例系數為km(km=Fx/Δl),則將式(3)代入式(2)化簡后,有:
(4)
因為當剪切力存在時,Δθ的改變量是很小的,所以可以做θ≈φ的近似,則:
Δld=Δlcosθ
(5)
最終,FBG上的應變值可以表示為:
(6)
由式(6)可以看出,函數前半部分與測試單元參數相關,后半部分與施力大小及方向相關。當θ為0°時,x軸向的剪切力的測試效果最敏感;當θ為90°時,y軸向的剪切力的測試效果最敏感。
2.2 系統設計
系統由PC、光源、解調儀、傳輸光纖及傳感單元組成。解調儀中集成掃頻激光光源,完成對所有FBG覆蓋波段的掃頻,解調儀光纖端口部分完成光信號的采集;滑動傳感單元采用FBG陣列實現,FBG有效長度為10 mm,在x軸方向鋪設3個FBG,間距10 mm,在中心位置y軸方向鋪設2個FBG,間距20 mm,從而構成相互正交的FBG陣列,5個FBG在厚度z軸方向距離為4 mm(h=4 mm)。
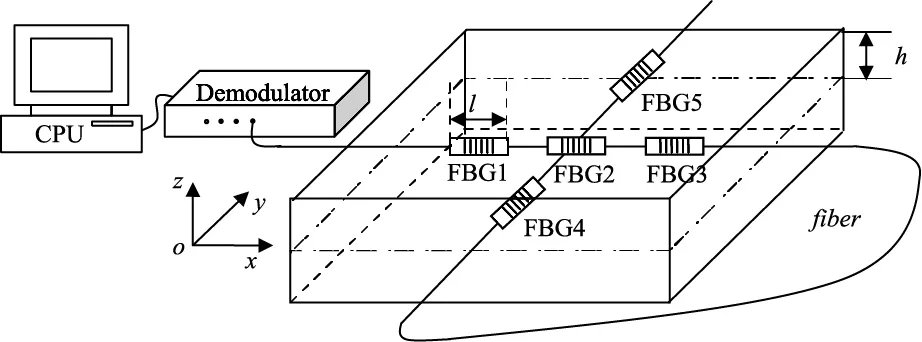
圖2 傳感系統總體結構圖Fig.2 Overall structure of the sensing system
3 參數優化及仿真分析
為了使系統可以盡可能地檢測到最大剪切力,對不同參數條件下的應變量進行了仿真分析。采用的硅膠塊作為傳感材料,尺寸為60 mm×40 mm×10 mm,楊氏模量為3.76 GPa,泊松比為0.485。傳感單元選用硅膠是依據夾持工裝中該材料可以保護被夾持工件表面不受損傷,故將FBG陣列排布在硅膠塊夾層的方式實現夾持結構的傳感特性。在該傳感區域中央放置待測物體(坐標系原點取傳感單元中心位置),待測物為邊長20 mm的鋼制正立方體,密度為7.85 g/cm3,經計算可知,其在傳感區域的重力為0.628 N。針對FBG有效尺寸lFBG和FBG到傳感單元上表面的距離h進行優化設計。令lFBG=10 mm,h分別取2 mm、3 mm、4 mm、5 mm、6 mm,分析不同h時形變靈敏度的變化趨勢,如圖3(a)所示。
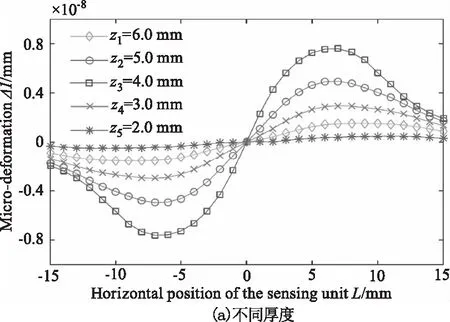
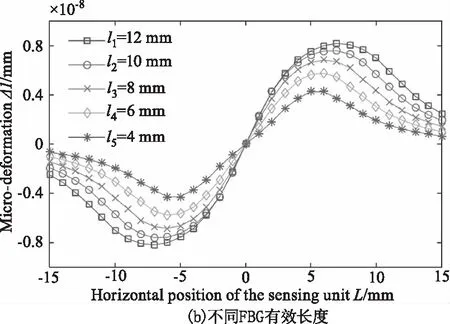
圖3 不同參數條件下微位移量變化趨勢Fig.3 Trend of micro-deformation under different parameters
在圖3(a)的仿真結果中可知,當FBG有效長度不變時,其在傳感單元中的放置深度對形變靈敏度影響明顯不同,令h=4 mm,lFBG分別取4 mm、6 mm、8 mm、10 mm、12 mm,分析了不同lFBG條件下形變靈敏度的變化趨勢,如圖3(b)所示。仿真結果顯示,在相同的橫向剪切力作用下,當FBG有效尺寸固定時,埋入深度會影響形變靈敏度,呈現先增大后減小的趨勢,在已設計的幾種結構中當h=4 mm時,響應最敏感;與此同時,當埋入深度固定不變時,隨著FBG有效長度的增大,形變靈敏度會成正比例增大,但由于需要考慮測試區域的空間分辨率,最終選擇了lFBG=10 mm。
4 實 驗
4.1 實驗條件
實驗系統包括一個寬帶光源,一個FBG解調器(分辨率為1 pm)、計算機及滑傳感單元。寬帶光源發出的光經隔離器、耦合器后進入傳感單元,傳感單元采用60 mm×40 mm×10 mm的硅膠體構成,并將FBG預埋在深度4 mm的位置上。當待測物受到x方向施力時,FBG的中心波長發生偏移,從而判斷分析其是否產生滑動或滑動的位置。
4.2 靈敏度測試
根據傳感單元的設計,5個FBG傳感器被嵌入到相應的測試位置上,對于傳感單元而言,其具有對稱性,剪切沿正軸(x和y)施加力,形成在x和y方向上的力fx或fy。當傳感單元上施加fx時,實驗結果如圖4(a)所示,當傳感單元上施加fy時,實驗結果如圖4(b)所示。
實驗結果顯示,當加載fx時,FBG1、FBG2和FBG3產生波長偏移響應,而FBG4、FBG5由于剪切力fx與其軸向垂直,故中心波長基本保持不變;當加載fy時,FBG4、FBG5產生波長偏移響應,而FBG1、FBG2和FBG3由于剪切力fx與其軸向垂直,故中心波長基本保持不變。將施力量與波長偏移量進行擬合,并對比5個FBG測試結果后發現,y1=y4=0.0051x-2.2×10-5,y2=0.0063x+1.6×10-5,y3=y5=0.0043x+1.6×10-5(斜率表示其靈敏度,單位nm/N)。由于FBG1與FBG3的位置間距與FBG4和FBG5的位置間距是一致的,所以在不同軸向上其受相同剪切力時,具有相近的應變-波長偏移量響應曲線。FBG1和FBG4屬于壓縮狀態,FBG3和FBG5屬于拉伸狀態,故其擬合曲線斜率略有不同。FBG2由于傳感位置更近,故其靈敏度在該組FBG中最高。綜上所述,從FBG的波長偏移響應編號及程度可以實現對待測物剪切力大小及方向的識別,同時,其線性度可以反映該系統具有較好的穩定性。
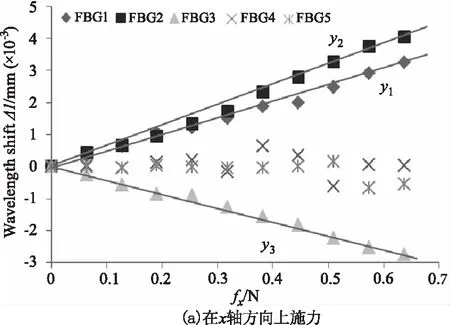
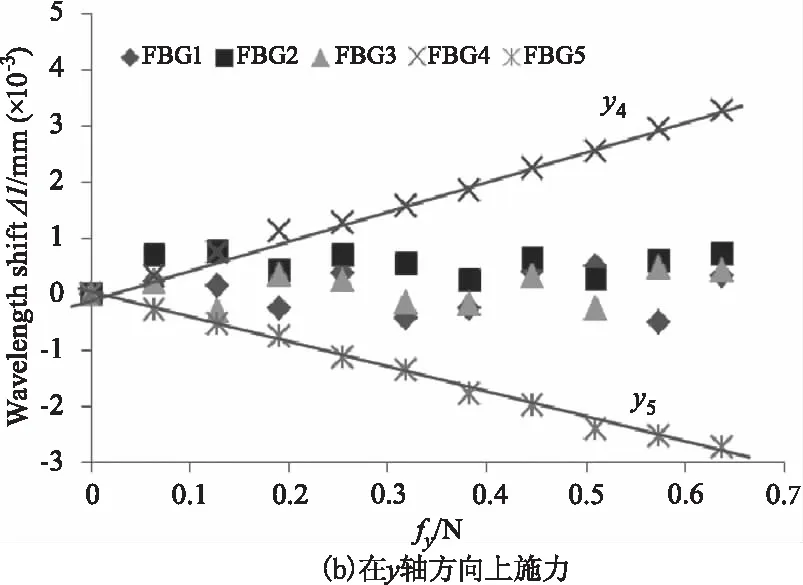
圖4 不同施力方向下各個FBG的波長偏移量Fig.4 Wavelength shift of each FBG under fx and fy
4.3 滑動測試
當被測物在傳感單元上,通過不斷增加拖拽力使物體在傳感單元上產生位移,對物體不動、產生位移,最終勻速滑動出傳感單元的過程進行分析,整個拖拽過程1.0 s內完成,則FBG的波長偏移量如圖5所示。
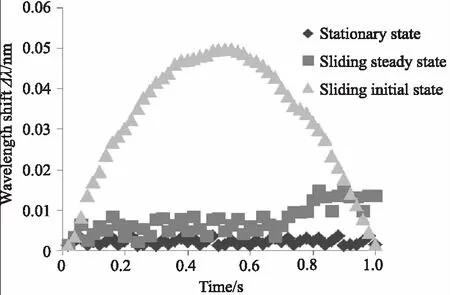
圖5 滑動過程中波長偏移量變化趨勢Fig.5 Trend of wavelength shift during sliding
當被測物在傳感單元上未發生滑動摩擦時,雖存在沿x或y方向的剪切力,但FBG初始波長不發生改變,即剪切力對FBG形成預應力的作用效果,從而不產生Δλ。而當物體產生滑動,則該力平衡狀態被打破,其橫向剪切力發生改變,從而對應位置FBG中心波長發生改變。最終,穩定勻速滑動時,雖然存在與傳感單元的摩擦力,但由于與FBG張力平衡,故其偏移量幾乎為零,略有波動。在此基礎上,對不同的滑動速度進行了測試,采用1.0 s和2.0 s完成同一待測物的滑動測試,結果如圖6所示。
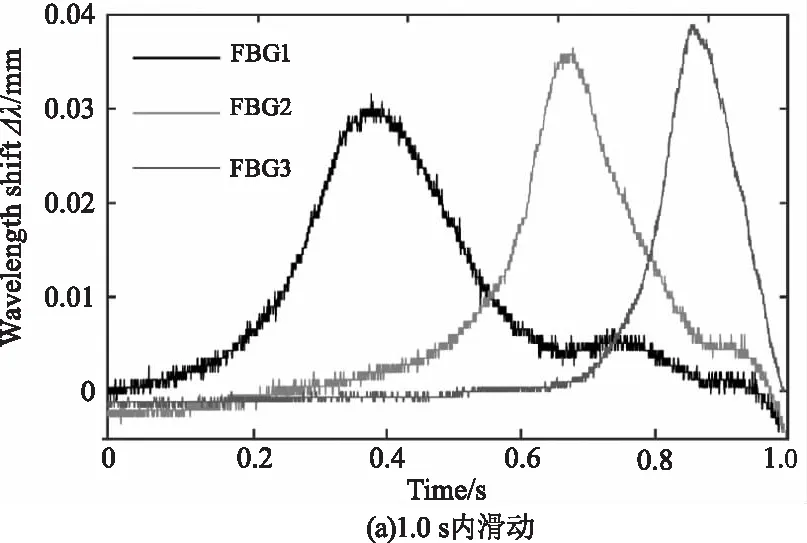
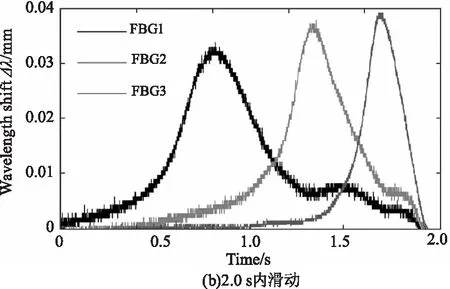
圖6 不同滑動速度下的波長偏移量變化Fig.6 Wavelength shift variation at different sliding speeds
由圖6(a)和(b)對比可知,當拖動傳感單元上物體的軌跡相同時,其對應的波長偏移量振幅相同,說明傳感單元中FBG檢測到的波長偏移量僅與橫向剪切力的大小與方向有關,受運動速度影響很小,側面反映了系統具有較好的可重復性;同時,雖然物理過程一致,但由于滑動時間不同,FBG產生的波長偏移量變化所占時長具有明顯不同,2.0 s內完成時波長偏移量的波動時間約0.65 s,比1.0 s內完成時的約0.32 s要延長約1倍。可見,雖然響應譜形未發生明顯變化,但通過解調波動時間可以實現對滑動速度的解算。
5 結 論
針對相移型光纖光柵傳感器回波光譜中相移幅度、位置的精確控制問題,提出了一種用對稱加載應力的微應變調制結構,通過梁彎曲實現對相移型光纖光柵局域相移進行調諧,通過改變載荷的位移,可以很容易地配置相移幅度。該方法可穩定控制正負相移,低成本、精度高。該方法適應各種機械設計,在動態光學器件中具有潛在的應用前景可以作為可調諧光纖激光器,精細可調諧光學濾波器或位移/應變傳感器。
猜你喜歡
計算機應用(2023年1期)2023-02-03 03:09:28
音樂天地(音樂創作版)(2022年10期)2023-01-13 05:47:42
湘潮(上半月)(2022年5期)2022-12-06 03:02:28
計算機應用(2022年2期)2022-03-01 12:33:42
計算機應用(2022年1期)2022-02-26 06:57:42
計算機應用(2021年4期)2021-04-20 14:06:36
數學小靈通(1-2年級)(2021年3期)2021-04-13 01:01:58
計算機應用(2021年3期)2021-03-18 13:44:48
計算機應用(2021年1期)2021-01-21 03:22:38
數學小靈通·3-4年級(2017年11期)2017-11-29 01:35:50
